Robust adaptive PID control of electro-hydraulic servo load system
WANG Hong-hui(王鸿辉), LI Jun(李军), YUAN Zhao-hui(袁朝辉), WU Juan(吴娟)
(College of Automation, Northwestern Ploytechnical University, Xi’an 710072, China)
Abstract: For the electro-hydraulic servo load system, a robust adaptive PID controller was proposed. The controller realized the asymptotic tracking of the desired output trajectory, which used the PID controller as closed-loop controller and used the CMAC neural network to approximate the nonlinear and uncertainties. The stability proof of the closed-loop controller was also presented. The simulation and experiment results indicate that the hybrid controller has the higher loading spectrum tracking accuracy and stronger robustness.
Key words: electro-hydraulic servo load system; robust adaptive; PID controller; surplus force
CLC number: TP13 Document code: A Article ID: 1672-7207(2011)S1-0349-06
1 Introduction
Electro-hydraulic servo load system is one of the important equipments for the ground semi-physical simulation platform of aircrafts. It is used very widely to simulate the aerodynamic load on the rudder-face, then we can check the technical performances of the subsystems or assemblies on aircraft, such as actuators, hydraulic system and flight control system. With the increase of demands of the flight maneuverability in recent aviation industrial area, electro-hydraulic servo load system should meet higher requirements of tracking accuracy and dynamic performance.
The tracking accuracy of electro-hydraulic servo load system is mainly depended on two factors, one is surplus force produced by the motion of object being loaded, another is the dynamic response ability of load control system itself[1], which is commonness in general control systems.
Previously, the several strategies of inhibiting the surplus force were compensating controllers based on the linear mathematic model and structure invariance principle[2-6], which achieved a certain effects. However, the practical control effects in engineering were disappointed for the nonlinear factors and uncertainties of electro-hydraulic servo system.
At present, PID controller is the most widely used closed-loop controller, but with the increase of complexity, nonlinear factors and uncertainties, this classic PID controller would not satisfy the requirements of tracking accuracy. Hence, several improved PID controllers is proposed[7-12],among which adaptive PID controller algorithm based on neural network is closely and frequently concerned for its ability of learning arbitrary nonlinear[13-18]. But this algorithm is deficient in the analysis of stability, it is unconvinced in determining the parameters of controller for lacking of theoretical basis and is less been used.
A robust adaptive PID control algorithm is proposed, which uses PID controller as close-loop controller and adopts CMAC neural network to online learn the system’s uncertainties and external disturbance, so it can realize the asymptotic tracking to desired trace, and it has the advantages of simple structure and realizing easily.
2 System’s mathmatic model (Electro- hydraulic servo load system)
Fig.1 shows the structure diagram of electro-hydraulic servo load system. We can get the system mathematic model according to the following steps.
(1) Flow equation of servo valve after linearization:
 (1)
(1)
where Qf is the demanded flow of load, Kq is the flow magnification coefficient of servo valve, Kc is the flow-pressure magnification coefficient of servo valve, xv is the displacement of valve spool, and pf is the pressure difference of load.
(2) Flow rate continuation equation of hydraulic cylinder:
 (2)
(2)
where At is the piston effective area of cylinder,  is the piston output displacement of cylinder, Vt is the effective volume of cylinder, Ey is the equivalent bulk modulus of oil, and Csl is the leakage coefficient of cylinder.
is the piston output displacement of cylinder, Vt is the effective volume of cylinder, Ey is the equivalent bulk modulus of oil, and Csl is the leakage coefficient of cylinder.
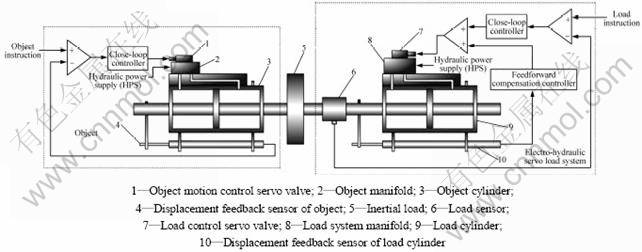
Fig.1 Structure diagram of electro-hydraulic servo load system
(3) Equilibrium equation of load force:
 (3)
(3)
where F is load force, mt is the equivalent mass of load system’s moving part, and bt is viscosity damping coefficient.
(4) Load sensor equation:
 (4)
(4)
where Kt is the composite stiffness coefficient of load system, and xy is the displacement disturbance on the load cylinder caused by the motion of object being loaded.
(5) Displacement of valve spool:
 (5)
(5)
Thus, we can choose the state variable:

and get the state equation of system:
 (6)
(6)
where
 ,
,  ,
,
 ,
,  ,
,
 ,
,
 ,
,  ,
,
Δ is the uncertainties or errors produced by the parameters’ changes of electro-hydraulic servo load system and servo valve’s nonlinear factors, and f(xy) is the smooth function of displacement disturbance xy,

3 Robust adaptive PID control
It is assumed that the load instruction is Fd and keep e=Fd-F, then we can get:
 (7)
(7)
where
 ,
, ,
, ,
, ,
, .
.
According to the system expressed by Eq.(7), we can give the PID controller as:
 (8)
(8)
 .
.
In which, positive definite matrix P meets the equation:

where  ,and Q1 is the symmetric positive definite matrix of 3×3.
,and Q1 is the symmetric positive definite matrix of 3×3.
Now, we can design a CMAC neural network to online approximate the nonlinear and uncertainties  , that is:
, that is:
 (9)
(9)
where w is the ideal weight vector,  is the actual weight vector,
is the actual weight vector,  is the error between ideal weight vector and actual weight vector, and ε is the approximation error of ideal neural network.
is the error between ideal weight vector and actual weight vector, and ε is the approximation error of ideal neural network.
We can consider the system expressed by Eq.(7) and then design the robust adaptive PID controller as:
 (10)
(10)
 is the adaptive control term.
is the adaptive control term.
Then, the weight regulation rule of CMAC neural network can be selected as:
 (11)
(11)
Β is the weight learning coefficient of CMAC neural network.
Theorme According to nonlinear and uncertain system, if we adopt the robust adaptive PID controller (Eq. (10)) and select Eq.(11) as the weight regulation rule of CMAC neural network, meanwhile, but we confirm the robust parameter η>|ε|. It is definite that the close-loop system is approximation stability, the system tracking error to desired trace yd and the weight error of CMAC neural network will asymptotically converge to zero.
Proof The function of system’s Lyapunov is constructed as follows
 (12)
(12)
After derivation, we can get:


 (13)
(13)
we pay attention to  and keep η>|ε|,then we can get:
and keep η>|ε|,then we can get:
 (14)
(14)
Because of matrix PBBTP being positive definite matrix, hence:
 (15)
(15)
We can know from Eq.(15) that the derivation of system’s Lyapunov function is less than zero, therefore, V→0,that is  ,
,  under t→∞.
under t→∞.
4 Simulation and test results
4.1 Simulation
In order to verify the performances of this controller and compare with the classic controller based on the structure invariance principle, we use Matlab/Simulink as tool to simulate it.
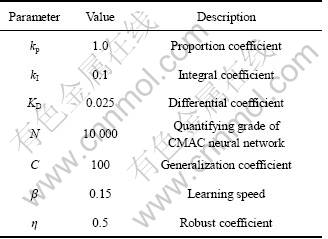
The parameters of robust adaptive PID controller are listed in Table 1.
Table 1 Parameters of robust adaptive PID controller
In order to compare the robust adaptive PID controller with the classic linear feedforward compensation controller, here we give the linear feedforward compensation controller embedded in the system’s model based on the structure invariance principle. This controller is simplified to first-order format:

Fig.2 illustrates the performance difference of inhibiting the surplus force between the robust adaptive PID controller and the classic linear feedforward compensation controller. The setting condition is that load instruction is zero and moving status of object is sinusoidal form: x=65sin(2πft), f=4 Hz (Fig.2(a)) and f=5 Hz (Fig.2(b)), as shown in Fig.2.
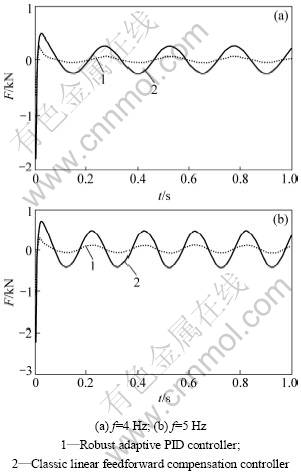
Fig.2 Surplus force contrast between robust adaptive PID controller and classic linear feedforward compensation controller, moving form of object: x=65sin(2πft)
Analyzing from the simulation results in Fig.2, the robust adaptive PID controller has an advantage over the classic linear feedforward compensation controller in inhibiting surplus force under any motion frequency of object, especially in higher frequency.
What are the reasons keeping the performance of the classic linear feedforward compensation controller so poor? Firstly, the classic linear feedforward compensation controller only can compensate the low-order terms of surplus force, excluding the high-order terms. Secondly, the influence of system’s nonlinear factors and uncertainties will enhance and reduce the performance of inhibiting surplus force when the motion frequency of object increases.
But the robust adaptive PID controller use CMAC neural network to online learn the system’s nonlinear factors, uncertainties and external disturbance, its performance of inhibiting surplus force will more excellent.
To check the robust adaptive PID controller’s ability of tracking the load instruction, we give the load instruction as: F=5 000+2 000sin(6πt) N, the motion pattern of object being loaded is x=65sin(10πt). We can get the simulation results, as shown in Fig.3.
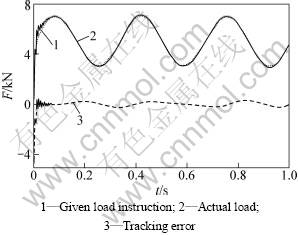
Fig.3 Tracking simulation results of robust adaptive PID controller
We can get conclusion that the robust adaptive PID controller has higher accuracy to tracking the instruction and more excellent control performance.
4.2 Test results
(1) Using EVOC industrial computer as control platform to run the software(including the controller);
(2) Constructing a set of mechanical fixture which has enough stiffness to install the load system and object.
(3) Hydraulic power(1.8×104 kPa);
(4) Oil temperature <50°;
(5) Environment temperature<30°;
(6) The motion pattern of object: x=30sin(2πft) mm;
(7) The load form is: F=Ax.
Fig.4 shows the results when f is equal to 0.5, 2.0 and 5.0 Hz.
Seeing from Fig.4, the controller’s tracking accuracy is very high under every frequency point, it shows that the robust adaptive PID controller has a good ability or performance of tracking instruction and anti-interference.
5 Conclusions
In view of the nonlinear factors, uncertainties and external disturbances in the electro-hydraulic servo load system, in this paper a robust adaptive PID control algorithm is proposed and the conditions to confirm the stability of closed-loop system are given. It is proved by simulation and actual test that this controller has good ability to inhibit the surplus force, stronger robustness to system’s nonlinear factors, uncertainties and external disturbance, good dynamic performance to track the given instruction.
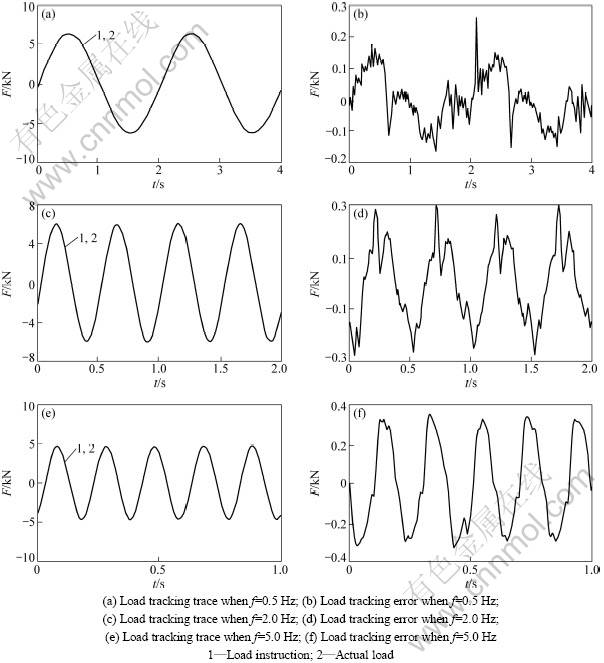
Fig.4 Load tracking test results
References
[1] JIAO Zong-xia, HUA Qing, WANG Xiao-dong, et al.Estimation for performance of load simulator[J]. Chinese Journal of Mechanical Engineering, 2002, 38(11): 26-30. (in Chinese)
[2] SU Dong-hai, LIU Qing-he, WU Sheng-lin, et al. Dynamic compensation and simulation analysis for improving control performances of electro-hydraulic load simulator [J]. Chinese Journal of Mechanical Engineering, 1999, 10(1): 15-17. (in Chinese)
[3] WANG Xin-min, LIU Wei-guo. Internal variable feedback control in electro-hydraulic loading [J]. Chinese Journal of Mechanical Engineering, 2006, 17(23): 2447-2450. (in Chinese)
[4] LIANG Li-hua, LIU Qiang, ZHAO Lin-lin. Research on feed-forward compensation decoupling control for the electro-hydraulic load simulator of fin stabilizer [J]. Chinese Journal of Mechanical Engineering, 2007, 18(4): 439-441. (in Chinese)
[5] HAO Jing-jia, ZHAO Ke-ding, XU Hong-guang, et al. The application of double valve control with pressure and flow servo valve in electro-hydraulic load simulator [J]. Chinese Journal of Mechanical Engineering, 2002, 13(10): 142-145. (in Chinese)
[6] JIAO Zong-xia, GAO Jun-xia, HUA Qing, et al.The velocity synchronizing control on the electro-hydraulic load simulator[J]. Chinese Journal of Aeronautics, 2004, 17(1): 39-46.
[7] MIN Xu, LI Shao-yuan, QI Chen-kun, et al. Auto-tuning of PID controller parameters with supervised receding horizon optimization[J]. ISA Transactions, 2005, 44: 491-500.
[8] Su Y X, SUN Dong, Duan B Y. Design of an enhanced nonlinear PID controller[J]. Mechatronics, 2005, 15: 1005-1024.
[9] Tan K K, Ferdous R, Huang S. Closed-loopautomatic tuning of PID controller for nonlinear systems[J]. Chemical Engineering Science, 2002, 57: 3005-3011.
[10] George S, Kookos I K. PID controller tuning using mathematical programming[J]. Chemical Engineering and Processing, 2005, 44: 41-49.
[11] Segovia J P, Sbarbaro D, Ceballos E. An adaptive pattern based nonlinear PID controller[J]. ISA Transactions, 2004, 43: 271-278.
[12] Thanh T D C, Ahn K K. Nonlinear PID control to improve the control performance of 2 axes pneumatic artificial muscle manipulator using neural network[J]. Mechatronics, 2006, 16: 577-587.
[13] YE Jun. Adaptive control of nonlinear PID-based analog neural networks for a nonholonomic mobile robot[J]. Neurocomputing, 2008, 71: 1561-1565.
[14] Mohammad M, Molavi D A, Mehrdad A. Online tuning of genetic based PID controller in LFC systems using RBF neural network and VSTLF technique[J]. Neural Network World, 2008, 18(4): 309-322.
[15] ZHANG Ming-guang, WANG Zhao-gang, WANG Peng. Adaptive PID decoupling control based on RBF neural network and its application[C]//Proceedings of the 2007 International Conference on Wavelet Analysis and Pattern Recognition (ICWAPR ’07). Beijing, China, 2007: 727-731.
[16] WANG Jin, GAO Wen-zhong, GU Shu-sheng, et al. PID-like controller using a modified neural network[J]. International Journal of Systems Science, 1997, 28(8): 809-815.
[17] Lee C H, Teng C C. Calculation of PID controller parameters by using a fuzzy neural network[J]. ISA Transactions, 2003, 42(3): 391-400.
[18] Chu S Y, Teng C C. Tuning of PID controllers based on gain and phase margin specifications using fuzzy neural network[J]. Fuzzy Sets and Systems, 1999, 101(1): 21-30.
(Edited by YANG You-ping)
Received date: 2011-04-15; Accepted date: 2011-06-15
Corresponding author: WANG Hong-hui(1978-), PhD, Lecturer; Tel: +86-18602960855; E-mail: wanghonghui@nwpu.edu.cn

