���ڸĽ�SVPWM������ͬ�����ʸ������
���ܰ�1, 2��������1���Ժ�Ϊ3
(1. ���ռ���ʦ��ѧԺ ������Ϣ����ѧԺ������ ���ݣ�213001;
2. �Ͼ����պ����ѧ �Զ���ѧԺ������ �Ͼ���210016;
3. �����г����̷����̹����������� ���ݣ�213127)
ժҪ�����SVPWM�е������жϺ�����ʸ������ʱ����ȡ����µ��㷨��ͨ���Ƚ������ѹ֮��Ĵ�С��ϵ���������жϣ������ߵ�ѹ��������ʸ������ʱ�����ȡ�������������贫ͳ�㷨�е����Ǻ�����������ת���㣬�Ӷ��˷���ͳ�㷨����������Ӱ����㾫�ȵ�ȱ�㡣���Ľ���SVPWM�㷨Ӧ��������ͬ�����ʸ������ϵͳ�У���������ģ�������ϵͳ�ķ���ģ�͡�����ʵ�����֤��ʵ���㷨�Ŀ�ѧ�Ժ���Ч�ԡ�
�ؼ��ʣ�SVPWM������ͬ�������ʸ������
��ͼ����ţ�TM34��TM921.5 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-1090-06
Vector control of permanent magnet synchronous motors based on novel SVPWM algorithm
XING Shao-bang1, 2, HAN Xiao-xin1, ZHAO Hong-wei3
(1. College of Electrical and Information Engineering, Jiangsu Teachers University of Technology,
Changzhou 213001, China;
2. College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China;
3. Management Office of Changzhou Yangtze River Embankment Engineering, Changzhou 213127, China)
Abstract: A novel algorithm about sector judgment and function time calculating of adjacent vector in SVPWM was proposed. The new algorithm judged sectors through comparing three phase voltage and calculated function time of adjacent vector using line voltage. Trigonometry function and coordinate transformation were not needed, and the new algorithm overcame the shortcomings of traditional algorithm that large amount of calculation affects the calculation precision. Then the novel SVPWM algorithm was applied to permanent magnet synchronous motor vector control system, both the modules and the whole system simulation model were given. The simulation experiment proves that the new algorithm is scientific and effective.
Key words: SVPWM; permanent magnet synchronous motor; vector control
����ͬ�����(PMSM)�������С���ṹ���ɿ��Ը��ɱ��͵��ŵ㣬�ڸ������϶����ŷ�ϵͳ�еõ��˹㷺Ӧ�á�SVPWM��ʸ�����ƶ��ǵ�����Ϊ�Ƚ��ļ�����������Ӧ��������ͬ������Ŀ���ϵͳ�У��Կ������ܵ�������ɾ�����Ҫ�����壬Ҳ�����ѧ�߹�ע���ȵ�[1-7]������[1-2]�о��˻���SVPWM������ͬ�����ʸ�����ƣ�����SVPWM���ô�ͳ�㷨���临���Աؽ���ϵͳ�����ܺ�ʵ�ִ������ɺ��Ե�Ӱ�졣����÷��[3]��SVPWMӦ��������ͬ�����ֱ��ת�ؿ��Ƶ��У���SVPWM���õ���Ȼ�Ǵ�ͳ�㷨��¬���[4]�о��˰�����ʸ����PMSMģ��DTC������ʹ��ʸ�����ֵ��ת�ص����Եõ���ַ��ӡ����ΕF��[5]����������ЧӦ�Կռ��ѹʸ������������������Ƶ�����ͬ�����������ε�Ӱ�졣���ǿ[6]���һ�ֽ�ʸ�����ƺ�ֱ��ת�ؿ������ϵ��������ܿ��Ƽ���������[7-8]�о�������ͬ���������ϵͳ�е�ת�ٹ��ƺʹ����۲����⡣
����������ǰ���о��Ļ����ϣ����SVPWM�е������жϺ�����ʸ������ʱ�����ȡ�������ؼ�����������µļ���㷨�����㷨ͨ���Ƚ������ѹ֮��Ĵ�С��ϵ���������жϣ������ߵ�ѹ��������ʸ������ʱ�����ȡ�����贫ͳ�㷨�е����Ǻ�����������ת���㣬ֻ����������㼴�ɽ��������жϺ�����ʸ������ʱ�����ȡ���Ӷ��˷�����ͳ�㷨���������Ӱ��ϵͳ���ܵ�ȱ�㡣���Ľ���SVPWM����Ӧ��������ͬ�����ʸ������ϵͳ�У���������ģ�������ϵͳ�ķ���ģ�ͣ������з���ʵ�顣
1 SVPWM�ĸĽ��㷨�����潨ģ
1.1 SVPWMԭ��
��ѹԴ��������ĵ��͵�·��ͼ1��ʾ����ÿ���ű۵�״̬��SX(X=A, B, C)��ʾ�������ű۵�ͨ�����ű۹ض�ʱSX=1����֮SX=0���������ű�״̬�����(SA, SB, SC)����8�֡���ֱ��ĸ�����Դ���ΪVdc����������ѹ[UAO, UBO, UCO]T��[SA, SB, SC]T֮��Ĺ�ϵ�ɱ�ʾΪ��
 (1)
(1)
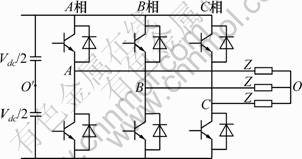
ͼ1 �����ѹԴ���������·
Fig.1 Circuit of three phase voltage source inverter
Ϊ��������������ѹ�ռ�ʸ��Ϊ��
 (2)
(2)
�������ÿ������״̬����Ӧ��������ѹ����ʽ(2)�����ѹԴ��������ܹ����8�ֵ�ѹ�ռ�ʸ�����ֱ�����ΪV0(000)��V1(001)��V2(010)��V3(011)��V4(100)��V5(101)��V6(110)��V7(111)������V0(000)��V7(111)����Ӧ�������ѹ��ֵΪ0������Ϊ��ʸ��������6������Ӧ�������ѹ��ֵ��Ϊ0������Ϊ��Чʸ��������֤������Чʸ���ķ�ֵ��Ϊ2Vdc/3���ڵ綯�����������������������ɵ����ྲֹ����ϵ�У�8����ѹ�ռ�ʸ���ķֲ������ͼ2��ʾ��6����Чʸ��������ƽ��ֳ�6��������������Чʸ��֮��ļн�Ϊ60�㡣SVPWM����ͨ����8���ռ�ʸ��ȥ��Ч�ο���ѹ�ռ�ʸ��Vref�����ڵ綯���ռ��γ�Բ����ת�ų���
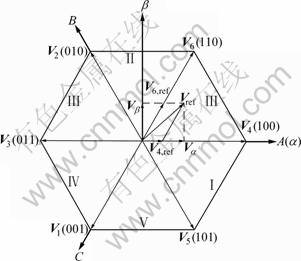
ͼ2 SVPWM�����������ֲ�
Fig.2 Distribution of vectors and sectors of SVPWM
�Բο��ռ��ѹʸ��Vref���ڵڢ�����(0��60?)Ϊ����Ϊ��ʹVref������ʸ��V4��V6�ĺϳ�ʸ����Ч��Vref��������
 (3)
(3)
ʽ�У�TsΪ�������ڣ�T1Ϊ�ռ��ѹʸ��V4������ʱ�䣻T2Ϊ�ռ��ѹʸ��V6������ʱ�䡣�ɴ˿ɼ���SVPWM�Ĺؼ������������жϺ�����ʸ������ʱ�����ȡ����ͳ�ķ����ǽ��ο��ռ��ѹʸ���ֽ���ͦ������������� ����V��ͨ�������к������������жϣ�ͨ��ʽ(4)��������ʸ��������ʱ�䡣
����V��ͨ�������к������������жϣ�ͨ��ʽ(4)��������ʸ��������ʱ�䡣
 (4)
(4)
�ɼ�����ͳ�㷨�Ƚϸ��ӣ���������
1.2 �����жϵ����㷨������潨ģ
��ʽ(2)�ã�

 (5)
(5)
��Ȼ��Vref���ڵڢ�����Ϊ������

 (6)
(6)
�����ã�
 (7)
(7)
�����Ϲ����ǿ���ģ����Ե������ѹ����ʽ(7)ʱ�����Ӧ�Ŀռ��ѹʸ���ش��ڵ�III������ͬ����������������������ж����������1��ʾ��
��1 ���������
Table 1 Requirement of sector judgment
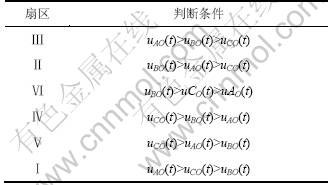
ʵ���ϣ����������ҵ�ѹ����ʽ(2)���У�


 (8)
(8)
ע�uref��uAO(t)֮�����λ��ϵ�����Եõ��ο��ռ��ѹʸ�������������������ѹ˲ʱֵ֮��Ķ�Ӧ��ϵ����ͼ3��ʾ����ͼ3���Ժ��������������ж��������1���е�һ�¡�
���ݱ�1���������жϵ�Simulink����ģ����ͼ4��ʾ��
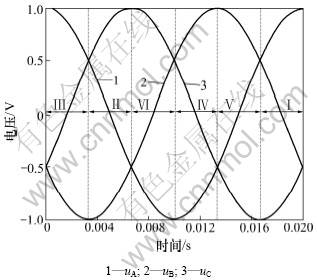
ͼ3 �������������ѹ֮��Ķ�Ӧ��ϵͼ
Fig.3 Comparison of sectors and three phase voltages
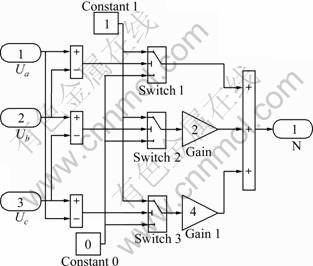
ͼ4 �����жϷ���ģ��
Fig.4 Simulation model of sectors judgment
1.3 ����ʸ������ʱ�����㷨������潨ģ
��Ȼ��Vref���ڵڢ�����Ϊ������ͼ2�ɵã�
 (9)
(9)
����ʽ(5)�ã�
 (10)
(10)
��ʽ(10)����ʽ(9)�ɵã�
 (11)
(11)
ҪʹV4��V6�ĺϳ�ʸ����Ч��Vref�����У�
 (12)
(12)
���ǣ�
 (13)
(13)
ͬ�������������������ʸ��������ʱ�䣬���2��ʾ��
����2���������б����жϣ���ǰʸ������ʱ��ΪTi����ʸ������ʱ��ΪTi+1����Ti+Ti+1>Tsʱ��ʵ�ʵ�TiȡΪ

Ti+1ȡΪ

��2 ����ʸ������ʱ��
Table 2 Action time of adjacent vectors

��������������������ʸ������ʱ����ȡ��Simulink����ģ����ͼ5��ʾ����ͼ5�ɿ������÷���ֻҪ���м��������㣬�����κ����Ǻ���������任���㡣
2 �������
Ϊ��֤����������㷨����ȷ�ԣ������˻��ڸĽ�SVPWM�㷨������ͬ�����ʸ������ϵͳ������ģ����ͼ6��ʾ������SVPWM��ģ��ķ���ģ����ͼ7��ʾ��
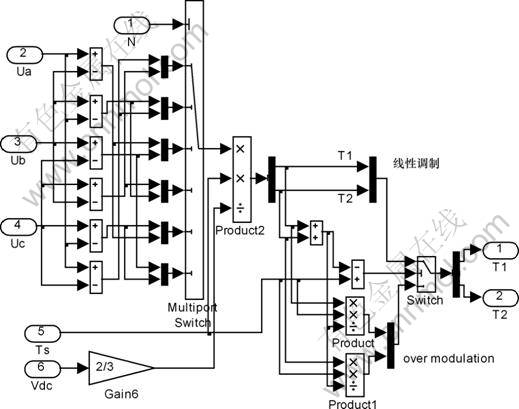
ͼ5 ����ʸ������ʱ����ȡ����ģ��
Fig.5 Simulation model of calculation action time of adjacent vectors
ʵ��������Ϊ�������Pe=8 kW�����ѹ U=380 V���ת�٦�r=1 500 r/min���ת��Te= 5 N��m�������������m=0.2 Wb��������np=4��dq����Ld=Lq=0.006 H�����ӵ���Rs=2.875 �����������RFe=125.83 ����ת������J=0.001 kg��m2��
ͼ8��ͼ9��ʾ�ֱ�Ϊת�ٸ�����ת����Ӧ���ߡ����Կ�����ϵͳ���нϺõĶ���̬���ܣ���ʹ�ڸ��ر仯ʱҲ��Ȼ�ܹ��ܺõظ���ת�٣���̬���Ϊ�㣬��һ����֤�˱���������������㷨����ȷ�ԺͿ����ԡ�
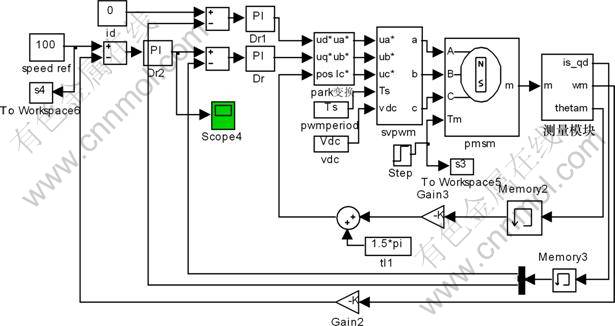
ͼ6 �ջ�����ϵͳ����ģ��
Fig.6 Simulation model of close-loop control system
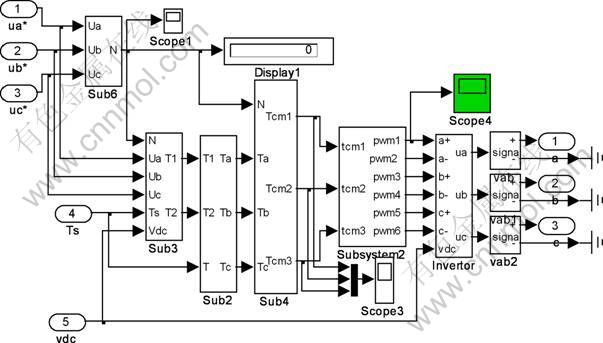
ͼ7 SVPWM��ģ�����ģ��
Fig.7 Simulation model of SVPWM submodule
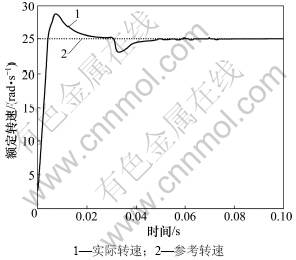
ͼ8 ת�ٸ�������
Fig.8 Speed response waveform
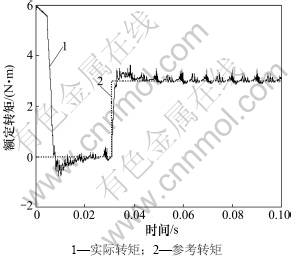
ͼ9 ת����Ӧ����
Fig.9 Torque response waveform
3 ����
(1) �ڷ���SVPWM��ԭ�����䴫ͳ�㷨�Ļ����ϣ�����������жϺ�����ʸ��������ʱ�������2���ؼ������������ӱ�ĵļ����㷨��
(2) ���㷨�����˴�ͳ�����Ǻ�����������ת���㣬ͨ���Ƚ��������ѹ֮��Ĵ�С��ϵ���������жϣ������ߵ�ѹ��������ʸ������ʱ�����ȡ����������ֻ����������㣬�ִ�ͳ�㷨��ȣ������˺ܶ����������������ڱ��ʵ�֡�
(3) �����㷨Ӧ��������ͬ�����ʸ������ϵͳ���У���������ģ�������ϵͳ��Matlab/Simulink����ģ�ͣ���������֤���������㷨�Ŀ�ѧ�Ժ���Ч�ԡ�
�ο����ף�
[1] ��Ⱥ��, �, ������. ����SVPWM������ͬ���綯��ϵͳ��ģ�����[J]. ���, 2006, 39(9): 38-41.
AN Qun-tao, LI Bo, WANG You-kun. Modeling and simulation of PMSM system using SVPWM[J]. Micromotor, 2006, 39(9): 38-41.
[2] �Ի�, ³��, �����. ����SVPWM������ͬ��������Ʋ����о�[J]. ������DZ�, 2009, 46(7): 13-16.
ZHAO Hui, LU Chao, FENG Jin-zhao. The research of control strategy for pmsm based on SVPWM [J]. Electrical Measurement & Instrumentation, 2009, 46(7): 13-16.
[3] ����÷, ����ƽ. ����SVPWM������ͬ�����ֱ��ת�ؿ���[J]. ������ҵ��ѧѧ��, 2007, 29(6): 613-617.
WANG Li-mei, GAO Yan-ping. Direct torque control for permanent magnet synchronous motor based on space voltage vector pulse width modulation[J]. Journal of Shenyang University of Technology, 2007, 29(6): 613-617.
[4] ¬��, �Թ���, ���. ������ʸ��������ͬ�����ֱ��ת�ؿ���[J]. ��������ѧ��, 2010(09): 1-6.
LU Da, ZHAO Guang-zhou, LI Nan. Direct torque control with zero-voltage vector for a permanent magnet synchronous motor[J]. Electric Machines and Control, 2010(09): 1-6.
[5] ���ΕF, �����, ������. ��������ͬ�������SVPWM ���������벹��[J]. ��������, 2007, 37(2): 29-31.
XU Jia-min, XU Guo-qing, KANG Jing-song. Analysis and compensation of the dead-time effect in SVPWM based on PMSM[J]. Electrical Drive, 2007, 37(2): 29-31.
[6] ���ǿ, �ֻ�. ������װʽ����ͬ����������ܿ��Ƽ���[J]. ��������ѧ��, 2010, 14(2): 1-6.
LI Bing-qiang, LIN Hui. A novel high performance control method for surface-mounted permanent magnet synchronous motor[J]. Electric Machines and Control, 2010, 14(2): 1-6.
[7] ף����, ��ӱ��, ���DZ�. ���ڷ�����״̬�۲���������ͬ���綯����λ�ô�����ʸ������[J]. �繤����ѧ��, 2010, 25(1): 50-57.
ZHU Xiao-hui, LI Ying-hui, CHEN Ya-bin. Sensorless vector control for PMSM based on nonlinear state observer [J]. Transactions of China Electrotechnical Society, 2010, 25(1): 50-57.
[8] ��Ӣ��, ����, ����. ����ͬ�����������ֱ��ת�ؿ���[J]. ϵͳ����ѧ��, 2009, 21 (19): 6166-6173.
LIU Ying-pei, WAN Jian-ru, LI Lian. Permanent magnet synchronous motor sensorless direct torque control[J]. Journal of System Simulation, 2009, 21(19): 6166-6173.
(�༭ ������)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ������ʡ��У��Ȼ��ѧ����������Ŀ(09KJD520003)�����ռ���ʦ��ѧԺ������л���������Ŀ(KYY08044)
ͨ�����ߣ����ܰ�(1980-)���У�ɽ����Զ�ˣ���ʦ���Զ���ϵͳ����ʦ�����µ�����������������о����绰��13585335846��E-mail: xsb@jstu.edu.cn

