深海电驱动复合轮式行驶机构转速和转矩协调控制策略
何耀,杨珏,张文明,冯雅丽
(北京科技大学 机械工程学院,北京,100083)
摘要:针对采用独立轮毂电机驱动的新型海底铰接式复合轮式行驶机构,研究其在水平路面转向过程中各驱动轮的相对转速关系,为各驱动轮电机在转向工况下的转速输出控制策略提供了理论依据;利用虚拟样机仿真模型模拟该行驶机构通过不同高度的台阶、越过壕沟及爬坡时的运行过程,得出各驱动轮电机的转矩输出特性;根据驱动轮组中各个车轮对地面正压力的变化规律,确定在不同越障工况下各驱动轮电机的转矩控制策略依据。
关键词:复合轮式车辆;轮毂电机驱动;转矩输出;控制策略
中图分类号:P731.31;P941.61 文献标志码:A 文章编号:1672-7207(2011)S2-0313-06
Coordinated speed and torque control strategy of electric multi driving wheels travel mechanism in deep sea environments
HE Yao, YANG Jue, ZHANG Wen-ming, FENG Ya-li
(School of Mechanical Engineering, University of Science and Technology Beijing, Beijing 100083, China)
Abstract: Based on a new type multi wheels travel mechanism driven by hub motors in deep sea environment, the velocity relationship of the driving wheels was studied when the articulated body was steering on flat road, which provided scientific basis for each hub motor speed control rule while steering. Virtual prototype was used to simulate processes of crossing obstacles and slope climbing. The torque output character of each motor was obtained and analyzed. According bearing force change law of each wheel, the basis for torque control strategy in these cases was determined.
Key words: multi driving wheels vehicle; drive by hub motors; output torque; control strategy
本文作者介绍了一种新型的铰接式复合轮式车辆,该车辆具有可变的多轮式行驶机构,每个轮子均采用独立轮毂电机驱动,可实现针对海底复杂路况越障行驶,结合液压控制的轮向机构,能够完成在复杂路面条件下的行驶工况[1-3]。由于采用独立式轮毂电机驱动,电机的控制策略将决定行驶机构的行驶和通过性能。本文作者分析了行驶机构在水平路面转向过程中各驱动轮的相对转速关系,由此确定各驱动电机在转向时的转速需求;运用计算机多体动力学仿真技术,对车辆动力学模型进行仿真分析,得出车辆越障的理论数据,评估车辆行驶性能。
1 电传动复合轮式行驶机构
行驶机构,包括铰接式车架及安装在铰接式车架两侧的四组复合轮系,如图1所示。每一组复合轮系包括前连接臂、前轮、中轮、后轮、后连接臂,控制油缸;前轮、中轮和后轮通过连接轴分别安装在前连接板和后连接板上,每个驱动轮由轮毂电机单独驱动,如图2所示。
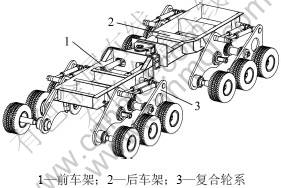
图1 电传动复合轮式行驶机构
Fig.1 Electric multi driving wheels travel mechanism
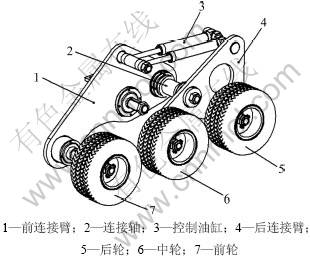
图2 轮毂电机驱动的复合轮系
Fig.2 Multi wheels driven by hub motors
采用主动控制的方式进行越障,攀越台阶、凸台等障碍时,前轮抬起,由前轮系的拖动作用及后轮系的推力使复合轮系越过台阶、凸台等障碍物。最大跨沟宽度为复合轮系前后轮的轴间距。
2 驱动电机的选择及控制算法
电驱动的海底行驶机构可以选用的电机有交流感应电机、开关磁阻电机、永磁同步电机和永磁无刷直流电机,交流感应电机功率因数较低,重量功率比大,开关磁阻电机在低速时转矩波动较大。永磁电机可分为由方波驱动的永磁无刷直流电机和由正弦波驱动的永磁同步电机,永磁无刷直流电机采用霍尔位置传感器或电机反电势的方法,性能更佳,直流电压利用率也比较高。在本行驶机构驱动系统中无刷直流电机驱动器采用电流、转速双闭环控制算法结构。图3所示为电机驱动器控制算法结构图[4-5]。

图3 电机驱动器控制算法
Fig.3 Control algorithm of motor controller
3 转向过程各驱动轮转速输出要求及协调控制
行驶机构采取铰接式车身,转向过程中内外侧车轮以及同一组车轮中不同位置的驱动轮都存在转速差,这种差别可以通过车身转向过程中的几何关系准确地表示,从而得到每个驱动轮转速输出的控制依 据[6]。
转向机构的设计标准为对任一转角θ,前、后复合轮系中各个中间轮均做纯滚动,即转动中心为前、后轮系中轮轴线的交点,最大设计转角为45°。由于复合轮系的结构特点,转向时各个复合轮系的前、后轮除做纯滚动外,势必会有一定的滑移。转向过程中电机协调控制的核心思想是通过调节电机转速,使各个前、后轮的滑移量最小。
为描述方便,先对各个轮系及轮子编号。令前内侧复合轮系、前外侧复合轮系、后内侧复合轮系、后外侧复合轮系分别为轮系Ⅰ、轮系Ⅱ、轮系Ⅲ和轮系Ⅳ。轮系Ⅰ前、中、后轮分别为W1,W2和W3;轮系Ⅱ前、中、后轮分别为W4,W5和W6;轮系Ⅲ前、中、后轮分别为W7,W8和W9;轮系Ⅳ前、中、后轮分别为W10,W11和W12。
令Oi (i=1, 2, …, 12)为Wi的几何中心点,vi为Oi点的速度,vi方向沿W i滚动方向向前,如图4所示。
以转向过程中的某一转角θ为例,分析各个轮胎的转速情况。A点为前后车架铰接点,O点为瞬时转动中心。对应任意θ角,轮系Ⅰ、Ⅱ与轮系Ⅲ、Ⅳ始终沿直线OA对称,研究时仅考虑后车架上轮系即可。
研究后车架上的轮i(i=7, 8, …, 12),令各轮中心点Oi到O点的距离为Li, 与
与 的夹角为
的夹角为 ,即
,即 ,
, 。若整车沿O点转动的角速度为ω,为使各轮的滑移量最小,应满足Wi沿OOi的切向方向做纯滚动,即:
。若整车沿O点转动的角速度为ω,为使各轮的滑移量最小,应满足Wi沿OOi的切向方向做纯滚动,即:
 (1)
(1)
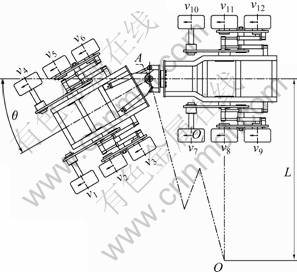
图4 转向过程中的速度关系
Fig.4 Velocity relation of wheels when steering
根据几何关系,可得:
 ,
, (2)
(2)
转动过程中轮8和轮11始终做纯滚动,分别以速度v8和v11为基准,根据已知参数,可以得出θ从0~45°变化时,v7/v8和v10/v11的变化曲线,如图5所示。
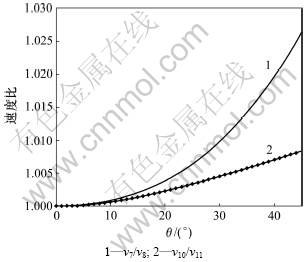
图5 转动过程中的相对转速差
Fig.5 Relative velocity difference of wheels when steering
由图5可以看出:转角θ增大时,v7/v8和v10/v11均单调增大,但相对转速差都很小,最大转速差仅为2.6%,而在常用的转角范围 时,最大相对转速差为1.2%。在驱动电机控制策略中可以忽略这个转速差的影响,让各复合轮系的内部各轮转速相等,即:
时,最大相对转速差为1.2%。在驱动电机控制策略中可以忽略这个转速差的影响,让各复合轮系的内部各轮转速相等,即:
 ,
, (3)
(3)
研究转向时内外轮系的车速关系,θ从0~45°变化时v8/v11的变化曲线如图6所示。以外侧车轮速度v11为基准,转向时需控制内侧轮系车速v8为:
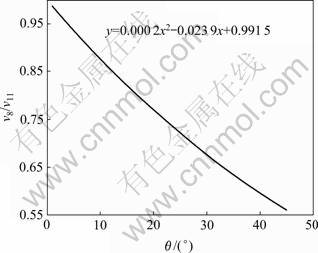
图6 转向时内外轮系的车速关系
Fig.6 Velocity relationship between inner and outer wheels when steering
 (4)
(4)
由式(3)和(4)可以得出:在任意转角θ下,各轮相对W11的转速关系,即只需监测v11和θ的变化,即可知道其他各轮的转速控制需求。
4 越障过程的转矩协调控制
越障过程中,各轮系中每一个驱动轮的对地接触状态会发生改变,而在附着条件不变的情况下,为充分利用各驱动轮的路面附着系数,应使驱动力矩的输出与驱动轮对地正压力成正比,即:
 (5)
(5)
其中:F为驱动力;N为驱动轮对地正压力; 为路面附着系数。
为路面附着系数。
驱动轮的转矩控制策略需要以驱动轮对地正压力作为依据。越障过程中出现驱动轮离地的情况时,可以认为=0,此时驱动轮控制电流应为零;越障过程中有驱动轮离地,造成其他个别驱动轮对地正压力增加,可以根据行驶状态的需要增加驱动轮的转矩输出,即增加驱动力F,以增加车辆的通过性能。
4.1 小于轮胎半径的障碍
壕沟或障碍小于轮胎半径的情况下,越障过程中,轮系控制油缸处于浮动状态,每个轮系通过油缸的伸缩自动适应路面高低起伏,驱动轮有离开地面的情况,但时间较短,整个轮系附着状态较好,有效地提高在海底复杂路况下的附着性能以及工作效率。自适应越障的状态如图7所示。
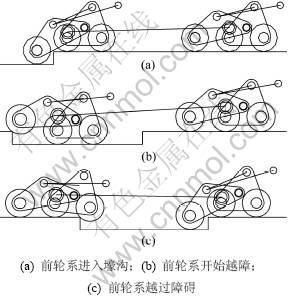
图7 小于轮胎半径的越障过程
Fig.7 Process of crossing obstacles shorter than wheel radius
根据整车仿真模型,模拟行走机构先遇到壕沟然后遇到台阶最后越过台阶的工况,越障过程不考虑转向,由于左右对称,故仅以轮系Ⅰ和轮系Ⅲ为研究对象。图8所示为模拟过程中,W1所受到的地面正压力N及滚动阻力矩T的变化。图8中a点为W1开始离开水平地面进入壕沟;b点为W1接触到壕沟平面的瞬间,受到的地面支反力N瞬时增大(图7(a));c-d-e段,W2由水平地面接触到壕沟平面;f-g段,W3完全接触壕沟地面;从h点开始,W7开始进入壕沟。在i点,W1遇到台阶,地面支反力N在j点出现峰值,约为 4.5 kN,到k点时W1完全越过台阶(图7(b))。图8中l点时轮系Ⅲ离开壕沟,模型开始完全在平地上行驶,N趋于稳定。
轮系中其他驱动轮的地面支反力与图8中W1的受力状态类似,在越障过程中控制系统需要充分利用车身载荷转移过程中驱动轮对地正压力的变化,增加驱动电机的转矩输出,在个别工况点会出现正压力减少的情况,需要减少转矩输出,以防止出现滑转。
4.2 大于轮胎半径的障碍
如果障碍的高度较大,比如轮系轮胎直径为439 mm,在500 mm台阶越障过程中每个轮系会出现2个驱动轮离开地面的情况,且持续时间较长,在这种情况下需要对悬空驱动轮的输出转速定为零,单独与地面接触的驱动轮将承受较大的地面载荷,需要增加转矩的输出,如图9所示。高越障过程与普通越障过程没有本质区别,但是轮系中单独与地面接触的驱动轮将获得更大的地面反作用力,应控制其输出更大的驱动转矩。
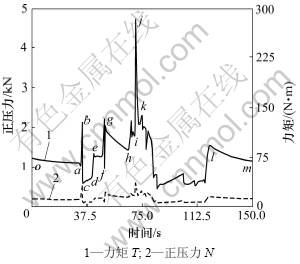
图8 小于轮胎半径越障过程中前轮系前轮受到的地面支反力及滚动阻力矩
Fig.8 Bearing force and rolling resistance moment from ground to support front wheel when crossing obstacles shorter than wheel radius

图9 大于轮胎半径的障碍
Fig.9 Process of crossing obstacles higher than wheel radius
图10所示为模型遇到大于轮胎半径台阶时仿真过程中,W1受到的地面支反力N和滚动阻力距T的变化情况。图10中:oa段表示轮系在水平路面上行驶,N保持稳定;从a点开始,W1遇到台阶,N和T都快速增加;在b点时达到峰值,N约为7.8 kN;在c点时,W1越过台阶,之后W2和W3陆续着地,N出现一定波动,到d点时轮系Ⅰ越障完成,之后平稳运行一段到e点。
4.3 特定角度坡道路面
由水平路面进入特定坡道路面时,如图11所示,在轮系浮动控制机构控制下,可以使每个驱动轮都与地面保持较好的接触,但驱动轮在进入坡道的过程中,W1受到的地面垂直反作用力是一个变化过程。模拟上述过程中所受到的与地面方向垂直力N及滚动阻力矩T的变化过程,如图12所示。从图12可以看出:N和T的变化趋势几乎一致,与行驶跨越较小障碍路面情况相比,在上坡行驶过程中前轮受到的地面支反力峰值稍高。
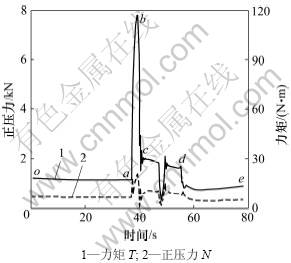
图10 越过大台阶时前轮系前轮受力情况
Fig.10 Bearing force and rolling resistance moment from ground to support front wheel when crossing obstacles higher than wheel radius

图11 特定角度坡道路面
Fig.11 Climbing of certain slope road
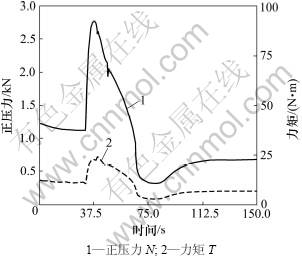
图12 坡道路面上前轮系前轮受到的地面支反力及
滚动阻力矩
Fig.12 Bearing force and rolling resistance moment from ground to support front wheel when crossing certain slope road
图13所示为模型由水平路面进入特定坡道路面的仿真过程中,轮系Ⅰ各轮受到的地面支反力N1,N2和N3的变化情况。图13中oa段模型在水平路面上行驶,地面支反力N1,N2和N3均保持稳定,从a点开始,W1首先进入坡道,N1快速增加,而N2和N3均有所减小;在b点时,W2进入坡道,此时N1减小,N2变大,N3仍保持下降趋势;从c点开始,W3进入坡道,N1和N2减小,N3增大;到d点时,W7进入坡道,N1,N2和N3均按原趋势变化,但变化率都有所增加;在e点时,W8进入坡道,N1,N2和N3均还是按原趋势变化,但变化率均减小;在e点时,W9进入坡道,N1,N2和N3均改变变化趋势,N1和N2增大,N3减小,此时模型开始完全在坡道上行驶。
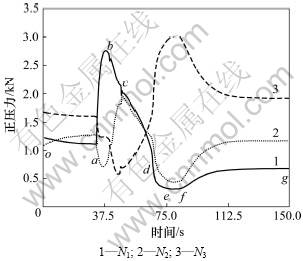
图13 坡道路面上前轮系各轮受到的地面支反力
Fig.13 Different bearing forces to support wheels of front-wheel unit when crossing a certain slope road
采用由液压缸控制的3个驱动轮为一组的轮组驱动形式,为车辆适应复杂路面条件提供了条件,轮组中有一个驱动轮与地面接触即可产生所需要的驱动力,通过对越障过程的动力学分析,确定了驱动轮对地面的正压力的变化规律,即驱动轮转矩输出控制依据。
5 结论
(1) 提出的铰接式、复合轮系海底行驶机构具有自适应和主动越障能力,每个驱动轮由单独的永磁无刷直流电机驱动,具有较高的控制灵活性。
(2) 通过对车身转向过程中每个驱动轮的行驶轨迹的计算,得到转向过程中速度输出控制策略依据。
(3) 通过模拟仿真,并对越障过程中每个驱动轮与地面接触状态的研究,得到了每个驱动轮输出转矩控制的依据,是进一步提高行驶机构通过性能的基础。
参考文献:
[1] 王俊杰, 李力, 陈金涛. 新型海山钴结壳作业车设计与仿真研究[J]. 机械工程与自动化, 2007, 23(4): 1-3.
WANG Jun-jie, LI Li, CHEN Jin-tao. Research on the performance of a new type of deep-sea all-terrain cobalt-crust mining vehicle based on simulation[J]. Mechanical Engineering and Automation, 2007, 23(4): 1-3.
[2] 王俊杰, 李力. 一种新型的深海钴结壳作业车行驶性能仿真研究[J]. 矿山机械, 2007, 35(5): 21-25.
WANG Jun-jie, LI Li. Simulation study to the steering properties of a new type of deep-sea cobalt-crust mining vehicle[J]. Mining Machinery, 2007, 35(5): 21-25.
[3] 卜英勇, 刘光华, 史春雪, 等. 深海钴结壳自行式采矿车航迹推算方法研究[J]. 郑州大学学报, 2007, 28(1): 12-15.
BU Ying-yong, LIU Guang-hua, SHI Chun-xue, et al. Study on dead reckoning for a deep-sea cobalt-rich mining vehicle[J]. Journal of Zhenzhou University, 2007, 28(1): 12-15.
[4] 陈清泉, 孙逢春. 现代电动车技术[M]. 北京: 北京理工大学出版社, 2002.
CHEN Qing-quan, SUN Feng-chun. Modern technology of electric vehicles[M]. Beijing: Beijing Institute of Technology Press, 2002.
[5] 葛英辉. 轮式驱动电动车控制系统的研究[D]. 杭州: 浙江大学电气工程学院, 2004.
GE Ying-hui. The control system for in-wheel driven electric vehicle[D]. Hangzhou: Zhejiang University. College of Electrical Engineering, 2004.
[6] 余志生. 汽车理论[M]. 北京: 机械工业出版社, 2007: 228-229.
YU Zhi-sheng. Automobile theory[M]. Beijing: China Machine Press, 2007: 228-229.
(编辑 李向群)
收稿日期:2011-06-15;修回日期:2011-07-15
基金项目:国家自然科学基金资助项目(50874006);国际海底区域性研究开发“十一五”项目(DYXM-115-04-02-03)
通信作者:杨珏(1975-),男,北京人,副教授,从事工程车辆设计;电话:010-62332467;E-mail: yangjue@ustb.edu.cn

