
�������������ʽ��ʻ����ת�ٺ�ת��Э�����Ʋ���
��ҫ�����壬��������������
(�����Ƽ���ѧ ��е����ѧԺ��������100083)
ժ Ҫ��
챵�����������ͺ��½�ʽ������ʽ��ʻ�������о�����ˮƽ·��ת������и������ֵ����ת�ٹ�ϵ��Ϊ�������ֵ����ת���µ�ת��������Ʋ����ṩ���������ݣ�����������������ģ��ģ�����ʻ����ͨ����ͬ�߶ȵ�̨�ס�Խ������������ʱ�����й��̣��ó��������ֵ����ת��������ԣ��������������и������ֶԵ�����ѹ���ı仯���ɣ�ȷ���ڲ�ͬԽ�Ϲ����¸������ֵ����ת�ؿ��Ʋ������ݡ�
�ؼ��ʣ�
������ʽ��������챵��������ת����������Ʋ�����
��ͼ����ţ�P731.31��P941.61 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S2-0313-06
Coordinated speed and torque control strategy of electric multi driving wheels travel mechanism in deep sea environments
HE Yao, YANG Jue, ZHANG Wen-ming, FENG Ya-li
(School of Mechanical Engineering, University of Science and Technology Beijing, Beijing 100083, China)
Abstract: Based on a new type multi wheels travel mechanism driven by hub motors in deep sea environment, the velocity relationship of the driving wheels was studied when the articulated body was steering on flat road, which provided scientific basis for each hub motor speed control rule while steering. Virtual prototype was used to simulate processes of crossing obstacles and slope climbing. The torque output character of each motor was obtained and analyzed. According bearing force change law of each wheel, the basis for torque control strategy in these cases was determined.
Key words: multi driving wheels vehicle; drive by hub motors; output torque; control strategy
�������߽�����һ�����͵Ľ½�ʽ������ʽ�������ó������пɱ�Ķ���ʽ��ʻ������ÿ�����Ӿ����ö�����챵����������ʵ����Ժ�����·��Խ����ʻ�����Һѹ���Ƶ�����������ܹ�����ڸ���·�������µ���ʻ����[1-3]�����ڲ��ö���ʽ��챵������������Ŀ��Ʋ��Խ�������ʻ��������ʻ��ͨ�����ܡ��������߷�������ʻ������ˮƽ·��ת������и������ֵ����ת�ٹ�ϵ���ɴ�ȷ�������������ת��ʱ��ת���������ü�������嶯��ѧ���漼�����Գ�������ѧģ�ͽ��з���������ó�����Խ�ϵ��������ݣ�����������ʻ���ܡ�
1 �紫��������ʽ��ʻ����
��ʻ�����������½�ʽ���ܼ���װ�ڽ½�ʽ������������鸴����ϵ����ͼ1��ʾ��ÿһ�鸴����ϵ����ǰ���ӱۡ�ǰ�֡����֡����֡������ӱۣ������ף�ǰ�֡����ֺͺ���ͨ��������ֱ�װ��ǰ���Ӱ�ͺ����Ӱ��ϣ�ÿ������������챵��������������ͼ2��ʾ��
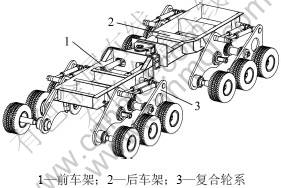
ͼ1 �紫��������ʽ��ʻ����
Fig.1 Electric multi driving wheels travel mechanism
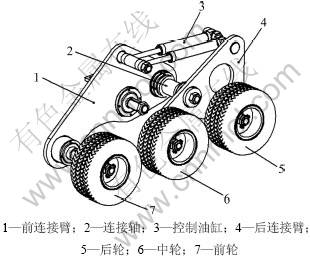
ͼ2 ��챵�������ĸ�����ϵ
Fig.2 Multi wheels driven by hub motors
�����������Ƶķ�ʽ����Խ�ϣ���Խ̨�ס�̨���ϰ�ʱ��ǰ��̧����ǰ��ϵ���϶����ü�����ϵ������ʹ������ϵԽ��̨�ס�̨���ϰ�����繵����Ϊ������ϵǰ���ֵ����ࡣ
2 ���������ѡ�����㷨
�������ĺ�����ʻ��������ѡ�õĵ���н�����Ӧ��������ش�����������ͬ�������������ˢֱ�������������Ӧ������������ϵͣ��������ʱȴ��ش������ڵ���ʱת�ز����ϴ����ŵ���ɷ�Ϊ�ɷ���������������ˢֱ������������Ҳ�����������ͬ�������������ˢֱ��������û���λ�ô��������������Ƶķ��������ܸ��ѣ�ֱ����ѹ������Ҳ�Ƚϸߡ��ڱ���ʻ��������ϵͳ����ˢֱ��������������õ�����ת��˫�ջ������㷨�ṹ��ͼ3��ʾΪ��������������㷨�ṹͼ[4-5]��

ͼ3 ��������������㷨
Fig.3 Control algorithm of motor controller
3 ת����̸�������ת�����Ҫ��Э������
��ʻ������ȡ�½�ʽ������ת��������������Լ�ͬһ�鳵���в�ͬλ�õ������ֶ�����ת�ٲ���ֲ�����ͨ������ת������еļ��ι�ϵȷ�ر�ʾ���Ӷ��õ�ÿ��������ת������Ŀ����� ��[6]��
ת���������Ʊ�Ϊ����һת�Ǧȣ�ǰ������ϵ�и����м��־�������������ת������Ϊǰ������ϵ�������ߵĽ��㣬������ת��Ϊ45�㡣���ڸ�����ϵ�Ľṹ�ص㣬ת��ʱ����������ϵ��ǰ�����ֳ����������⣬�Ʊػ���һ���Ļ��ơ�ת������е��Э�����Ƶĺ���˼����ͨ�����ڵ��ת�٣�ʹ����ǰ�����ֵĻ�������С��
Ϊ�������㣬�ȶԸ�����ϵ�����ӱ�š���ǰ�ڲิ����ϵ��ǰ��ิ����ϵ�����ڲิ����ϵ������ิ����ϵ�ֱ�Ϊ��ϵ����ϵ����ϵ�����ϵ������ϵ��ǰ���С����ֱַ�ΪW1��W2��W3����ϵ��ǰ���С����ֱַ�ΪW4��W5��W6����ϵ��ǰ���С����ֱַ�ΪW7��W8��W9����ϵ��ǰ���С����ֱַ�ΪW10��W11��W12��
��Oi (i=1, 2, ��, 12)ΪWi�ļ������ĵ㣬viΪOi����ٶȣ�vi������W i����������ǰ����ͼ4��ʾ��
��ת������е�ijһת�Ǧ�Ϊ��������������̥��ת�������A��Ϊǰ�ܽ½ӵ㣬O��Ϊ˲ʱת�����ġ���Ӧ����Ƚǣ���ϵ������ϵ��ʼ����ֱ��OA�Գƣ��о�ʱ�����Ǻ�����ϵ���ɡ�
�о����ϵ���i(i=7, 8, ��, 12)����������ĵ�Oi��O��ľ���ΪLi��![]() ��
��![]() �ļн�Ϊ
�ļн�Ϊ![]() ����
����![]() ��
��![]() ����������O��ת���Ľ��ٶ�Ϊ�أ�Ϊʹ���ֵĻ�������С��Ӧ����Wi��OOi����������������������
����������O��ת���Ľ��ٶ�Ϊ�أ�Ϊʹ���ֵĻ�������С��Ӧ����Wi��OOi����������������������
![]() (1)
(1)
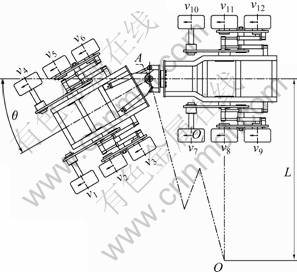
ͼ4 ת������е��ٶȹ�ϵ
Fig.4 Velocity relation of wheels when steering
���ݼ��ι�ϵ���ɵã�
![]() ��
��![]() (2)
(2)
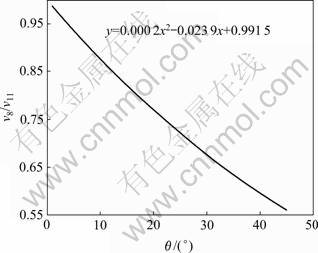
ת����������8����11ʼ�������������ֱ����ٶ�v8��v11Ϊ����������֪���������Եó��ȴ�0~45��仯ʱ��v7/v8��v10/v11�ı仯���ߣ���ͼ5��ʾ��
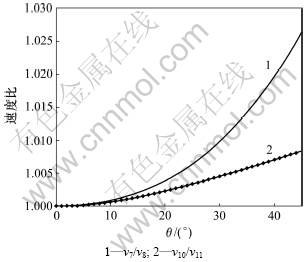
ͼ5 ת�������е����ת�ٲ�
Fig.5 Relative velocity difference of wheels when steering
��ͼ5���Կ�����ת�Ǧ�����ʱ��v7/v8��v10/v11�������������ת�ٲ��С�����ת�ٲ��Ϊ2.6%�����ڳ��õ�ת�Ƿ�Χ![]() ʱ��������ת�ٲ�Ϊ1.2%��������������Ʋ����п��Ժ������ת�ٲ��Ӱ�죬�ø�������ϵ���ڲ�����ת����ȣ�����
ʱ��������ת�ٲ�Ϊ1.2%��������������Ʋ����п��Ժ������ת�ٲ��Ӱ�죬�ø�������ϵ���ڲ�����ת����ȣ�����
![]() ��
��![]() (3)
(3)
�о�ת��ʱ������ϵ�ij��ٹ�ϵ���ȴ�0~45��仯ʱv8/v11�ı仯������ͼ6��ʾ���������ٶ�v11Ϊ����ת��ʱ������ڲ���ϵ����v8Ϊ��
ͼ6 ת��ʱ������ϵ�ij��ٹ�ϵ
Fig.6 Velocity relationship between inner and outer wheels when steering
![]() (4)
(4)
��ʽ(3)��(4)���Եó���������ת�Ǧ��£��������W11��ת�ٹ�ϵ����ֻ����v11�ͦȵı仯������֪���������ֵ�ת�ٿ�������
4 Խ�Ϲ��̵�ת��Э������
Խ�Ϲ����У�����ϵ��ÿһ�������ֵĶԵؽӴ�״̬�ᷢ���ı䣬���ڸ����������������£�Ϊ������ø������ֵ�·�渽��ϵ����Ӧʹ�������ص�����������ֶԵ���ѹ�������ȣ�����
![]() (5)
(5)
���У�FΪ��������NΪ�����ֶԵ���ѹ����![]() Ϊ·�渽��ϵ����
Ϊ·�渽��ϵ����
�����ֵ�ת�ؿ��Ʋ�����Ҫ�������ֶԵ���ѹ����Ϊ���ݡ�Խ�Ϲ����г�����������ص����ʱ��������Ϊ![]() =0����ʱ�����ֿ��Ƶ���ӦΪ�㣻Խ�Ϲ���������������أ�����������������ֶԵ���ѹ�����ӣ����Ը�����ʻ״̬����Ҫ���������ֵ�ת�������������������F�������ӳ�����ͨ�����ܡ�
=0����ʱ�����ֿ��Ƶ���ӦΪ�㣻Խ�Ϲ���������������أ�����������������ֶԵ���ѹ�����ӣ����Ը�����ʻ״̬����Ҫ���������ֵ�ת�������������������F�������ӳ�����ͨ�����ܡ�
4.1 С����̥�뾶���ϰ�
�������ϰ�С����̥�뾶������£�Խ�Ϲ����У���ϵ�����״��ڸ���״̬��ÿ����ϵͨ���������Զ���Ӧ·��ߵ���������������뿪������������ʱ��϶̣�������ϵ����״̬�Ϻã���Ч������ں�����·���µĸ��������Լ�����Ч�ʡ�����ӦԽ�ϵ�״̬��ͼ7��ʾ��
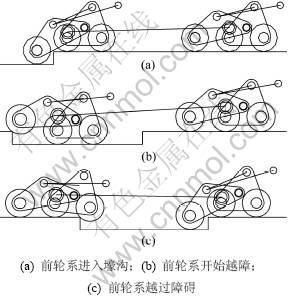
ͼ7 С����̥�뾶��Խ�Ϲ���
Fig.7 Process of crossing obstacles shorter than wheel radius
������������ģ�ͣ�ģ������������������Ȼ������̨�����Խ��̨�Ĺ�����Խ�Ϲ��̲�����ת���������ҶԳƣ��ʽ�����ϵ�����ϵ��Ϊ�о�����ͼ8��ʾΪģ������У�W1���ܵ��ĵ�����ѹ��N������������T�ı仯��ͼ8��a��ΪW1��ʼ�뿪ˮƽ������뺾����b��ΪW1�Ӵ�������ƽ���˲�䣬�ܵ��ĵ���֧����N˲ʱ����(ͼ7(a))��c-d-e�Σ�W2��ˮƽ����Ӵ�������ƽ�棻f-g�Σ�W3��ȫ�Ӵ��������棻��h�㿪ʼ��W7��ʼ���뺾������i�㣬W1����̨�ף�����֧����N��j����ַ�ֵ��ԼΪ 4.5 kN����k��ʱW1��ȫԽ��̨��(ͼ7(b))��ͼ8��l��ʱ��ϵ���뿪������ģ�Ϳ�ʼ��ȫ��ƽ������ʻ��N�����ȶ���
��ϵ�����������ֵĵ���֧������ͼ8��W1������״̬���ƣ���Խ�Ϲ����п���ϵͳ��Ҫ������ó����غ�ת�ƹ����������ֶԵ���ѹ���ı仯���������������ת��������ڸ�����������ѹ�����ٵ��������Ҫ����ת��������Է�ֹ���ֻ�ת��
4.2 ������̥�뾶���ϰ�
����ϰ��ĸ߶Ƚϴ�����ϵ��ֱ̥��Ϊ439 mm����500 mm̨��Խ�Ϲ�����ÿ����ϵ�����2���������뿪�����������ҳ���ʱ��ϳ����������������Ҫ�����������ֵ����ת�ٶ�Ϊ�㣬���������Ӵ��������ֽ����ܽϴ�ĵ����غɣ���Ҫ����ת�ص��������ͼ9��ʾ����Խ�Ϲ�������ͨԽ�Ϲ���û�б������𣬵�����ϵ�е��������Ӵ��������ֽ���ø���ĵ��淴��������Ӧ������������������ת�ء�
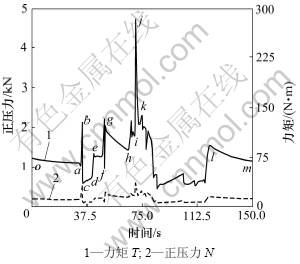
ͼ8 С����̥�뾶Խ�Ϲ�����ǰ��ϵǰ���ܵ��ĵ���֧����������������
Fig.8 Bearing force and rolling resistance moment from ground to support front wheel when crossing obstacles shorter than wheel radius

ͼ9 ������̥�뾶���ϰ�
Fig.9 Process of crossing obstacles higher than wheel radius
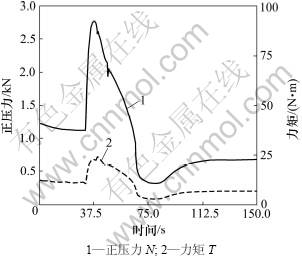
ͼ10��ʾΪģ������������̥�뾶̨��ʱ��������У�W1�ܵ��ĵ���֧����N����������T�ı仯�����ͼ10�У�oa�α�ʾ��ϵ��ˮƽ·������ʻ��N�����ȶ�����a�㿪ʼ��W1����̨�ף�N��T���������ӣ���b��ʱ�ﵽ��ֵ��NԼΪ7.8 kN����c��ʱ��W1Խ��̨�ף�֮��W2��W3½���ŵأ�N����һ����������d��ʱ��ϵ��Խ����ɣ�֮��ƽ������һ�ε�e�㡣
4.3 �ض��Ƕ��µ�·��
��ˮƽ·������ض��µ�·��ʱ����ͼ11��ʾ������ϵ�������ƻ��������£�����ʹÿ�������ֶ�����汣�ֽϺõĽӴ������������ڽ����µ��Ĺ����У�W1�ܵ��ĵ��洹ֱ����������һ���仯���̡�ģ���������������ܵ�������淽��ֱ��N������������T�ı仯���̣���ͼ12��ʾ����ͼ12���Կ�����N��T�ı仯���Ƽ���һ�£�����ʻ��Խ��С�ϰ�·�������ȣ���������ʻ������ǰ���ܵ��ĵ���֧������ֵ�Ըߡ�
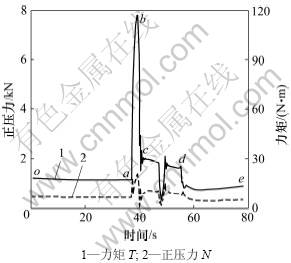
ͼ10 Խ����̨��ʱǰ��ϵǰ���������
Fig.10 Bearing force and rolling resistance moment from ground to support front wheel when crossing obstacles higher than wheel radius

ͼ11 �ض��Ƕ��µ�·��
Fig.11 Climbing of certain slope road
ͼ12 �µ�·����ǰ��ϵǰ���ܵ��ĵ���֧������
����������
Fig.12 Bearing force and rolling resistance moment from ground to support front wheel when crossing certain slope road
ͼ13��ʾΪģ����ˮƽ·������ض��µ�·��ķ�������У���ϵ������ܵ��ĵ���֧����N1��N2��N3�ı仯�����ͼ13��oa��ģ����ˮƽ·������ʻ������֧����N1��N2��N3�������ȶ�����a�㿪ʼ��W1���Ƚ����µ���N1�������ӣ���N2��N3��������С����b��ʱ��W2�����µ�����ʱN1��С��N2���N3�Ա����½����ƣ���c�㿪ʼ��W3�����µ���N1��N2��С��N3����d��ʱ��W7�����µ���N1��N2��N3����ԭ���Ʊ仯�����仯�ʶ��������ӣ���e��ʱ��W8�����µ���N1��N2��N3�����ǰ�ԭ���Ʊ仯�����仯�ʾ���С����e��ʱ��W9�����µ���N1��N2��N3���ı�仯���ƣ�N1��N2����N3��С����ʱģ�Ϳ�ʼ��ȫ���µ�����ʻ��
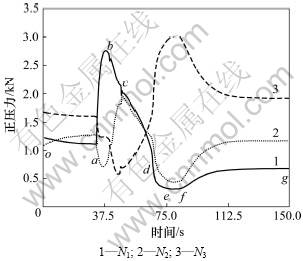
ͼ13 �µ�·����ǰ��ϵ�����ܵ��ĵ���֧����
Fig.13 Different bearing forces to support wheels of front-wheel unit when crossing a certain slope road
������Һѹ���Ƶ�3��������Ϊһ�������������ʽ��Ϊ������Ӧ����·�������ṩ����������������һ�������������Ӵ����ɲ�������Ҫ����������ͨ����Խ�Ϲ��̵Ķ���ѧ������ȷ���������ֶԵ������ѹ���ı仯���ɣ���������ת������������ݡ�
5 ����
(1) ����Ľ½�ʽ��������ϵ������ʻ������������Ӧ������Խ��������ÿ���������ɵ�����������ˢֱ��������������нϸߵĿ�������ԡ�
(2) ͨ���Գ���ת�������ÿ�������ֵ���ʻ�켣�ļ��㣬�õ�ת��������ٶ�������Ʋ������ݡ�
(3) ͨ��ģ����棬����Խ�Ϲ�����ÿ�������������Ӵ�״̬���о����õ���ÿ�����������ת�ؿ��Ƶ����ݣ��ǽ�һ�������ʻ����ͨ�����ܵĻ�����
�ο����ף�
[1] ������, ����, �½���. ���ͺ�ɽ�ܽ����ҵ�����������о�[J]. ��е�������Զ���, 2007, 23(4): 1-3.
WANG Jun-jie, LI Li, CHEN Jin-tao. Research on the performance of a new type of deep-sea all-terrain cobalt-crust mining vehicle based on simulation[J]. Mechanical Engineering and Automation, 2007, 23(4): 1-3.
[2] ������, ����. һ�����͵���ܽ����ҵ����ʻ���ܷ����о�[J]. ��ɽ��е, 2007, 35(5): 21-25.
WANG Jun-jie, LI Li. Simulation study to the steering properties of a new type of deep-sea cobalt-crust mining vehicle[J]. Mining Machinery, 2007, 35(5): 21-25.
[3] ��Ӣ��, ���⻪, ʷ��ѩ, ��. ��ܽ������ʽ�ɿ������㷽���о�[J]. ֣�ݴ�ѧѧ��, 2007, 28(1): 12-15.
BU Ying-yong, LIU Guang-hua, SHI Chun-xue, et al. Study on dead reckoning for a deep-sea cobalt-rich mining vehicle[J]. Journal of Zhenzhou University, 2007, 28(1): 12-15.
[4] ����Ȫ, ��괺. �ִ��綯������[M]. ����: ����������ѧ������, 2002.
CHEN Qing-quan, SUN Feng-chun. Modern technology of electric vehicles[M]. Beijing: Beijing Institute of Technology Press, 2002.
[5] ��Ӣ��. ��ʽ�����綯������ϵͳ���о�[D]. ����: �㽭��ѧ��������ѧԺ, 2004.
GE Ying-hui. The control system for in-wheel driven electric vehicle[D]. Hangzhou: Zhejiang University. College of Electrical Engineering, 2004.
[6] ��־��. ��������[M]. ����: ��е��ҵ������, 2007: 228-229.
YU Zhi-sheng. Automobile theory[M]. Beijing: China Machine Press, 2007: 228-229.
(�༭ ����Ⱥ)
�ո����ڣ�2011-06-15�������ڣ�2011-07-15
������Ŀ��������Ȼ��ѧ����������Ŀ(50874006)�����ʺ����������о�������ʮһ�塱��Ŀ(DYXM-115-04-02-03)
ͨ�����ߣ�����(1975-)���У������ˣ������ڣ����¹��̳�����ƣ��绰��010-62332467��E-mail: yangjue@ustb.edu.cn
ժҪ����Բ��ö�����챵�����������ͺ��½�ʽ������ʽ��ʻ�������о�����ˮƽ·��ת������и������ֵ����ת�ٹ�ϵ��Ϊ�������ֵ����ת���µ�ת��������Ʋ����ṩ���������ݣ�����������������ģ��ģ�����ʻ����ͨ����ͬ�߶ȵ�̨�ס�Խ������������ʱ�����й��̣��ó��������ֵ����ת��������ԣ��������������и������ֶԵ�����ѹ���ı仯���ɣ�ȷ���ڲ�ͬԽ�Ϲ����¸������ֵ����ת�ؿ��Ʋ������ݡ�
