DOI: 10.11817/j.issn.1672-7207.2015.10.051
车路协同系统仿真实时性优化方法
李四辉1,上官伟1, 2, 3,蔡伯根1,王剑1, 2, 3
(1. 北京交通大学 电子信息工程学院,北京,100044;
2. 北京交通大学 轨道交通控制与安全国家重点实验室,北京,100044;
3. 北京交通大学 北京市轨道交通电磁兼容与卫星导航工程技术研究中心,北京,100044)
摘要:为了研究车路协同系统的仿真关键技术并构建车路协同系统仿真平台,针对车路协同系统仿真平台中的联邦成员间实时性问题,提出基于PTP(precision timing protocol)协议的高精度仿真主动时钟同步方法。讨论车路协同仿真联邦中各个联邦成员的时间管理策略,并基于时钟同步方法测试2种信息交互策略下的系统延时,提出车路协同系统的信息交互改进策略。仿真测试结果表明:平均同步时钟误差为5.69 μs,有效解决了各个联邦成员间的时钟同步问题;仿真系统中1级和2级系统从节点平均仿真延迟为0.77,1.02 ms,较好满足车路协同系统仿真需求。
关键词:交通工程;车路协同系统;高层体系架构;精确时钟同步协议;实时性
中图分类号:U283.2 文献标志码:A 文章编号:1672-7207(2015)10-3944-10
Cooperative vehicle-infrastructure system simulation strategy and method
LI Sihui1, SHANGGUAN Wei1, 2, 3, CAI Baigen1, WANG Jian1, 2, 3
(1. School of Electronics and Information Engineering, Beijing Jiaotong University, Beijing 100044, China;
2. State Key Laboratory of Rail Traffic Control and Safety, Beijing Jiaotong University, Beijing 100044, China;
3. Beijing Engineering Research Center of EMC and GNSS Technology for Rail Transportation,
Beijing Jiaotong University, Beijing 100044, China)
Abstract: In order to research the key technology on the intelligent vehicle infrastructure cooperative systems (IVICS) simulation and build the simulation platform, high level architecture (HLA)-based simulation framework for IVICS was designed. In view of system demand of real-time capabilities in simulation, a precision timing protocol (PPT) protocol-based highly accurate simulation clock synchronization was designed. Time management strategy for federates was discussed and system delay under two information interaction strategy was tested based on clock synchronization. Then an improved method was proposed. The results show that the average synchronization clock error is 5.69 μs, and that the average simulation delay from slaver nodes of both level 1 and level 2 system is 0.77 and 1.02 ms respectively, which indicate that the method can effectively resolve clock synchronization problems, and satisfy the requirement of IVICS simulation.
Key words: traffic engineering; intelligent vehicle infrastructure cooperative systems (IVICS); high level architecture (HLA); precision timing protocol (PTP); real-time capabilities
车路协同系统(IVICS)是基于先进的全时空动态交通信息采集、融合技术,通过全方位实施车车、车路动态实时信息交互进行车辆主动安全控制和道路协同管理,形成人、车、路有效协同的安全、高效和环保的道路交通系统[1-8]。车路协同的交通系统呈现出超于常规的复杂性,单一集中的仿真框架支撑环境难以适应此种特性[9-14]。近年来得到广泛应用的高层体系结构(high level architecture,HLA)已经被证明是一种很有效的分布式系统仿真框架,能有效地降低复杂系统仿真的复杂性并实现组件间的相互独立性。在仿真应用领域,欧、美各国均将HLA作为其军事仿真中的标准仿真体系。Emanuele等[15]将HLA与OMNET++相结合对通信网络的基础设备进行了仿真。此外,在车路协同的信息交互系统中,OPNET本身提供了与HLA的接口,使得OPNET仿真可以与HLA联合实现通信。HLA结合OPNET的工具组合,可以很好地满足系统仿真要求。基于HLA的仿真系统支撑框架对于构建具有多层次交互性特征的车路协同仿真系统具有较好的适应性,再考虑到HLA在信息交互中与OPNET结合的优越性,在车路协同系统仿真中基于该体系构建仿真系统的整体框架进行仿真研究。在车路协同系统仿真中,由于联邦成员间信息交互过程存在数据量大、交互频率高、交互过程复杂等特点,为了满足系统仿真周期500 ms的要求,本文作者基于HLA仿真框架针对实时性优化展开研究。HLA仿真框架中网络传输服务的主要承担者是RTI,因此,提高RTI系统的性能是改善网络实时性的根本途径。黄晓东等[16]设计了试验对目前常用的RTI版本进行了实时性测试,结果显示Pitch公司的pRTI性能相比较而言是最好的,其消息的传输延迟小于1 ms。目前常用的改进网络实时性的方法包括多线程模式、数据过滤、时间管理算法改进都是通过设计RTI来提高系统实时性能。在选定了RTI版本后,根据黄松等[17]中提出的减少成员时间推进请求的次数改善系统实时性的方法,本文作者提出了一种改进的信息交互策略来减少RTI带来的网络延迟,改善仿真系统的实时性能。
1 基于HLA的车路协同系统仿真框架
高层体系结构由美国国防部建模与仿真办公室(DMSO)颁布,并于2000年9月被IEEE正式接纳为IEEE 1516标准。HLA引入了声明管理、数据分发管理等新机制,实现了仿真节点间的点对点通信或组播通信,极大减少了网络冗余数据[18-19]。
一个基于HLA仿真框架的仿真联邦的典型逻辑结构如图1所示[20]。
基于HLA的车路协同系统仿真框架中车路协同系统定义为联邦,车路协同仿真系统的各个子系统作为联邦成员,共同完成联邦的仿真目标,各个联邦成员既要完成自身的仿真任务,同时与其他联邦成员发生交互,活动自身需要的信息或向其他联邦成员提供信息,车路协同系统的联邦结构如图2所示。

图1 基于HLA的仿真系统逻辑结构
Fig. 1 Logical structure of HLA-based simulation system
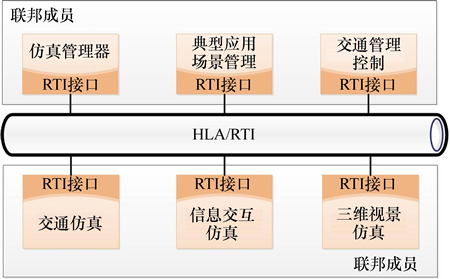
图2 基于HLA的IVICS仿真联邦逻辑模型
Fig. 2 HLA-based logic model for IVICS federation
由图2可知,IVICS仿真联邦共由6个联邦成员构成,各联邦成员的基本功能介绍如下:1) 仿真管理器联邦成员主要负责:联邦运行管理控制、时间管理、多分辨场景显示、车车/车路信息交互管理、日志管理;2) 典型应用场景管理联邦成员主要负责编写场景测试案例,尽可能全面描述真实场景;设计场景测试案例管理软件,增加测试序列生成功能,提供测试序列和交通场景加载命令;3) 交通管理控制联邦成员负责处理仿真过程中进行交通数据处理,实现相关交通控制算法,通过数据融合处理生成车辆运行状态控制信息、信号灯控制方案、交通提示信息;4) 交通仿真联邦成员主要负责仿真过程中全时空交通信息提取;5) 信息交互仿真联邦成员主要负责信息交互仿真;6) 3维视景仿真联邦成员根据确定的车路协同仿真场景图构建3维仿真场景。
2 基于PTP协议的主动时钟仿真同步方法
基于HLA的车路协同系统仿真联邦的整体框架,需要针对仿真联邦内各个联邦成员的仿真同步方法进一步研究。
2.1 基于PTP协议的高精度仿真时钟同步方法
在车路协同仿真系统中,需要一个全局时钟用来控制和监控系统状态,这就需要将联邦中各个联邦成员的时间进行统一。
PTP协议是IEEE-1588中定义的一种精密时钟同步协议,PTP协议借鉴了NTP技术,具有容易配置、额外网络开销小等有点。它的主要原理是通过信息传输中增加同步信号周期性的对网络中从属节点的时钟进行校正同步,由于PTP协议实现简单、占用的网络和计算资源少等优点使其广泛应用于分布式仿真系 统中。
为了保证时间同步的精度,必须保证时钟的精确定时。为了实现高精度的定时,例如微秒级别的定时,一般采用高频率的晶振实现。车路协同仿真系统采用VC6.0作为系统实现语言,计算机CPU本身就带有一个高精度的时钟[21],且Windows系统提供了API接口来获取CPU的震荡频率,因此,可以通过API 接口在VC++中构造1个高精度的逻辑时钟,并且可向物理时间单位进行转换。VC++有多种实现定时的方法,其中基于QueryPerformanceFrequence( )和Query- PerformanceCounter( )函数的定时器定时精度很高,通过测试,车路协同仿真系统采用该函数实现的定时器的定时误差分析结果如图3所示。
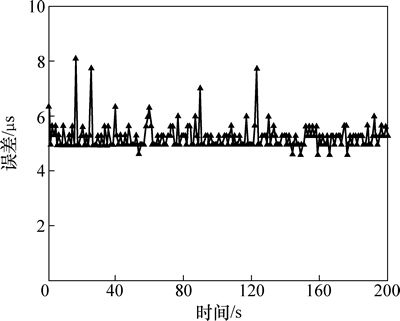
图3 定时器误差曲线
Fig. 3 Curve of timer errors
图3中显示了主时钟的误差比较稳定在6 μs左右,这表明实现高精度的时钟同步是可以实现的。
通过Windows系统提供的接口获得的高精度CPU震荡频率可以向逻辑时间单位进行转换。
使用t0表示CPU定时器的计数值,Δt为逻辑时间相对于CPU计数的偏差,当前逻辑时间t可由下式构造:
 (1)
(1)
并且当前逻辑时间t的修改可通过修改Δt来实现。当需要使用物理时间单位来度量逻辑时间时,可进行相应的转换。转换公式如下:
 (2)
(2)
式中:t′为逻辑时间,μs;f为CPU时钟振荡频率。
本文对基于PTP的时钟同步方法进行测试。测试中采用了2台配置相同的计算机,采用交换机搭建成局域网,其中1台作为主时钟,另外1台作为从时钟。逻辑时钟采用了利用上述原理构造的高精度时钟,CPU频率为2.93 GHz,可利用式t′=t×106/f转换成以μs为单位的逻辑时钟,测试过程与时钟同步过程类似。
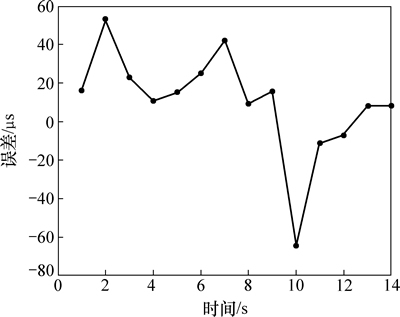
图4 测试时钟同步误差
Fig. 4 Clock synchronization test errors
根据图4测试结果,最大的误差为-64.38 μs,平均误差为22.13 μs。在实际应用中,尤其是在网络中简单采用上述PTP协议进行时钟同步会受到网卡缓存、网络不平衡性以及操作系统进程等多方面的影响。操作系统中由于时钟同步进程何时被执行会造成软件延时的不可预测性。
2.2 主动时钟同步方法
网络的不平衡性和操作系统进程调度的影响可能会造成时钟同步失效。对于网络的不平衡性,可以采用消息确认机制能有效解决这个问题。即在接收方收到信息后返回1个确认信息,而发送方只能在接收方的确认信息后才发送下一条信息。这样将2次信息传输进行隔离,使得接收方不会一下收到发送方的所有信息。为了减小系统进程调度的影响,可以在仿真中设置专用时钟同步线程,且线程优先级设置最高。
主动时钟同步方法的工作过程如图5所示:
1) 从时钟发送1个Sync报文给主时钟,并在报文中记录报文离开时间t1。
2) 当Sync报文到达主时钟时,主时钟立即给从时钟回复Delay_Req报文,该报文中含接收到Sync报文的时间t2以及Delay_Req报文的发送时间t3。
3) 当从时钟接收到该响应报文时,记录接收到响应报文的时间t4。同时立即发送Re_Resp报文重复上述过程。
4) 从时钟根据成功收到回应的相邻2个报文的往返时间,分别计算从源端到目的端和从目的端到源端的时延。
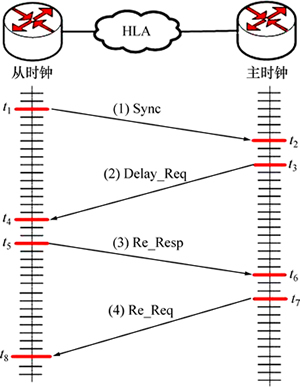
图5 主动时钟同步过程
Fig. 5 Process of active clock synchronization
由图5可得:
 (3)
(3)
 (4)
(4)
 (5)
(5)
 (6)
(6)
式中:tdelay1为Sync报文延时;tdelay2为Delay_Req报文延时;tdelay3为Re_Resp报文延时;tdelay3为 Re_Req报文延时。
为了从主动测试报文中获取有效的数据,需要对测得的数据进行处理,在tdelay1,tdelay2,tdelay3和tdelay4中剔除最大值和最小值,获得从时钟相对主时钟延时tdelay为

 (7)
(7)
式中:Max( )表示取最大值;Min( )表示取最小值。因此,从时钟相对于主时钟的时钟偏差tOffset为
tOffset=tdelay (8)
对于有效数据中t3-t2与t7-t6差距较大时的报文数据,本文认为系统进程调度对时钟同步影响较大,对此次时钟同步进行不予采用,下一周期再次进行同步。
本文对主动时钟同步方法进行测试,测试环境说明如下:6台PC机通过交换机构成100 MB高速LAN,各PC机配置相同;硬件为Inter(R)Core(TM)2 Duo CPU E7500,主频2.93 GHz,2 GB 内存,Inter(R) 82566 DM -2 Gigabit网卡;操作系统为Windows 7旗舰版;选用瑞典Pitch公司开发的pRTITM 1.3作为仿真联邦的运行时支撑环境。
实际仿真中微观交通仿真联邦成员作为主时钟,其他联邦成员作为从时钟。系统仿实时性要求为500 ms。为了实现较好时钟同步效果,仿真联邦真其他联邦成员的同步的周期设置为5s。仿真过程如下:从时钟从0 s时刻开始产生周期性的时钟同步请求数据,每隔5s进行1次时钟同步;主时钟分别按照主动时钟同步方法向从时钟回复相应的报文。通过仿真测试,分别观察主动时钟同步方法的时钟同步精度。
图6所示为主从时钟相对延时,图7所示为主动时钟相对同步误差。由图6及图7可以看出:采用主动时钟同步方法主动时钟同步报文的主从时钟平均相对延时为1.74 ms,最大的相对同步误差为32.71 μs,平均同步误差为5.69 μs。这表明本文提出的主动时钟同步方法具有较高时钟同步精度,能有效满足车路协同系统仿真中HLA仿真环境下不同联邦成员间的时钟同步需求。
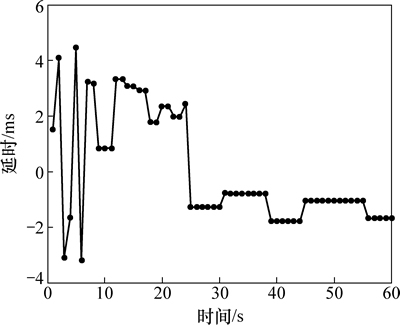
图6 主从时钟相对延时
Fig. 6 Relative delays between master and slaver clocks
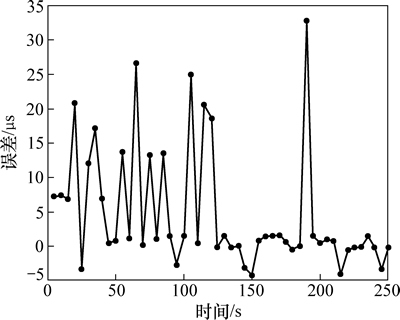
图7 主动时钟相对同步误差
Fig. 7 Relative synchronous errors of master clock
3 车路协同仿真系统实时性优化
基于上节提出的仿真时间同步方法,本节研究基于HLA仿真框架的车路协同仿真系统的仿真实时性优化方法。
3.1 联邦成员的时间管理策略
基于HLA的系统、仿真中时间一般划分为2类。
1) 物理时间(墙钟时间),对应于现实世界中的时间,也是仿真执行过程中的参考时间,如:2013-10-20 18:19:00。
2) 逻辑时间,即联邦成员在联邦时间轴上的当前值。
RTI的时间管理机制是通过协调带时间戳的消息传递来实现仿真时间的推进,针对联邦成员的时间特性和相互关系按照两种策略对成员进行组合分类:时间调节和时间受限。时间调节策略中,联邦成员的时间将与整个联邦的时间联系到一起,并产生带有时间戳的事件,其他相关的联邦成员将按时间戳的顺序对该事件进行处理。采用时间调节策略的联邦成员的时间推进将会对那些采用时间受限策略的成员的时间推进进行限制。LBTS(lower bound time constraint)定义了时间受限的联邦成员当前能够推进时间的最大限度。联邦成员采用的时间策略可以随时动态地改变,联邦成员时间具有既是调节又是受限的特性。RTI时间管理如图8所示。
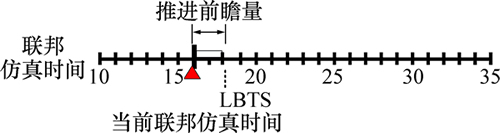
图8 RTI时间推进
Fig. 8 Time advance for RTI
根据车路协同仿真系统中各个联邦成员之间的功能分配,系统中仿真管理器、信息交互仿真、交通控制中心、三维视景仿真等联邦成员的时间推进都依赖于交通仿真成员的时间推进,而交通仿真成员的时间不受其他联邦成员影响。因此,把系统中各个成员时间管理分为2种,如图9所示。
1) 交通仿真成员采用“仅时间控制”,由该成员的时间作为系统推进时间。
2) 其他联邦成员采用“仅时间受限”的时间推进方式,他们的时间推进根据交通仿真成员的时间推进而推进。

图9 联邦成员时间推进策略
Fig. 9 Strategy for time advance of Federates
根据车路协同仿真系统需求,系统仿真周期为500 ms,也就是说各个联邦成员每500 ms内更新1次数据。交通仿真联邦成员在500 ms时间内更新所有当前步长的交互类中实时交通状态信息,其他联邦成员同时完成相应的属性值更新。因此,系统采用基于时间步长的时间推进方式进行时间推进,具体过程如下:首先,交通仿真成员中调用联邦仿真时间推进函数指明希望推进到的逻辑时间值(当前系统时间+时间步长);然后,通过时间回调函数验证时间推进成功,交通仿真成员开始准备下一个时间步长推进。
3.2 信息交互策略
车路协同系统仿真平台中联邦成员间信息交互量大并且信息交互频率较快,为了达到更好地系统仿真实时性效果,需确定仿真联邦成员间的信息交互策略。

图10 单瓶颈仿真拓扑
Fig. 10 Simulation topology of single bottleneck
在系统仿真过程中,当在RTI中存在过多的交互信息时,网络的性能会下降,此时会出现网络拥塞现象。车路协同系统仿真中具有瓶颈链路的简单网络拓扑结构如图10所示。仿真管理器联邦成员连接多个网络应用,是系统仿真网络瓶颈节点,因此,结合仿真管理器联邦成员展开信息交互策略研究。
系统仿真实时性与联邦成员间信息交互方式有关。本文提出2种联邦成员间信息交互的方式,下面分别介绍这2种信息交互策略并通过仿真系统性能测试实验对这2种策略进行分析比较。
3.2.1 循环发送单车的信息
在这种仿真策略下,联邦成员每次发送单个车辆的信息,循环n次更新完所有车辆信息,信息交互示意图如图11所示。由图11可知:该策略下交互信息结构简单易于发送和解析。但是在仿真过程中,随着车辆数目的增加,系统的数据发送频率增加,会增加系统的软件计算开销,受到计算机性能限制及网络信道容量限制,会影响到仿真实时性。
3.2.2 打包发送所有车辆信息
在这种仿真策略下,联邦成员一次打包发送所有车辆的信息,信息交互示意图如图12所示。由图12可知:该策略下系统的信息发送频率较小,但随着数据长度的增长,受到信道容量限制会造成RTI延时增大,进而影响到仿真系统延时。

图11 单车信息循环发送策略示意图
Fig. 11 Diagram of transmission strategy of information loop by single vehicle
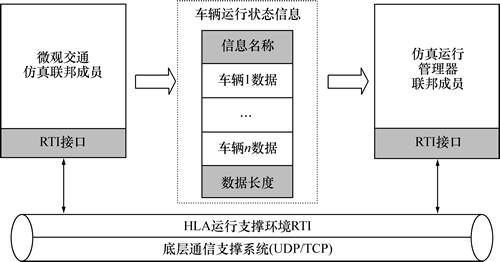
图12 多车信息打包发送策略示意图
Fig. 12 Diagram of transmission strategy of information loop by more vehicle
3.3 仿真实时性测试分析
基于PTP协议的高精度仿真时钟同步方法对分别采用2种仿真策略构建的仿真联邦进行性能测试。仿真测试硬件环境与2.2节中的相同。
测试方法为:基于PTP协议的高精度仿真时钟同步方法建立仿真联邦内的统一同步时间源,在信息交互的时戳属性中加入成员可获得最精确的当前时间进行测量。接收成员通过由同步时间源得到的时间减去从反射中收到的时戳来计算延迟。在实际测量中取多次“发送-反射”消息循环的统计平均值计算时延。
车路协同系统仿真中基本信息交互节点示意图如图13所示,主从关系是相对而言的,对于有信息交互的一对联邦成员来说,存在如下主从关系:发送信息的联邦成员称为主节点,而接收信息的联邦成员则称为从节点。在车路协同仿真系统中,微观交通仿真联邦成员属于主节点,仿真管理器联邦成员属于1级从节点,信息交互仿真联邦成员及3维视景仿真联邦成员属于2级从节点。系统仿真周期为交互信息从主节点到1级从节点,再由1级从节点到2级从节点的时间过程,系统仿真周期要求为1级和2级从节点延时均应小于500 ms。
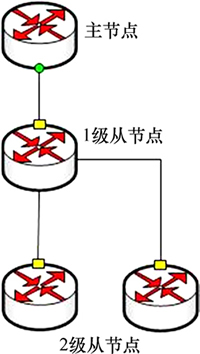
图13 基本信息交互节点结构图
Fig. 13 Organization-chart of basic information interaction node
针对系统仿真中两级从节点的结构分别对1级从节点及2级从节点的实时性进行测试。
首先在数据发送周期为1 ms时增加数据包长度,测试各个数据包长度下的系统从节点延迟[16],测试结果如图14所示。从图14可见:在固定发送周期下,随着发送数据包长度增加,系统1级从节点及2级从节点延迟都会增加。由此可知:对于信息交互策略2, 随着车辆数量的增加会导致系统从节点延迟增大。

图14 1 ms发送周期的各数据包长度下的从节点延迟曲线
Fig. 14 System delay curve of slaver node for different data lengthes under transmission cycle of 1 ms
针对数据包长度为100字节时增加系统信息发送频率,各个数据包长度下的系统从节点延迟随着时间的增长测试结果如图15~18所示。
在测试结果中,当信息发送周期减小到一定程度时(本文测试环境中为10-3 ms),由于计算机计算能力限制以及数据通信数据拥塞,随着仿真时间的增长,系统从节点延迟显著增长。
综合上述测试结果,本文提出信息交互改进策略:根据实际系统仿真需求可以采取2种信息交互策略结合的方式,即通过部分组合数据包的方式提高信道利用率,同时尽量降低信息发送频率从而提高系统实时性。
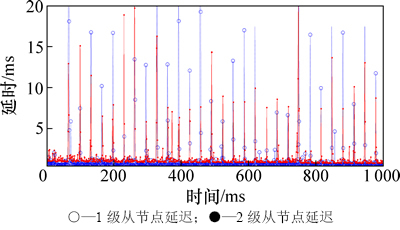
图15 1 ms发送周期的系统从节点延迟曲线
Fig. 15 System delay curve of slaver node under transmission cycle of 1 ms
3.4 车路协同系统仿真验证
为了验证本文提出的仿真系统实时性优化方法,本文基于车路协同仿真平台进行实时性测试。车路协同仿真联邦成员分布在6台仿真计算终端上,各PC机通过有线网络互联,构成仿真平台的运行环境。在1台RTI服务器开启pRTI软件,其他PC机安装好pRTI客户端软件并做好相关设置后,可以进行仿真联邦的联调测试。
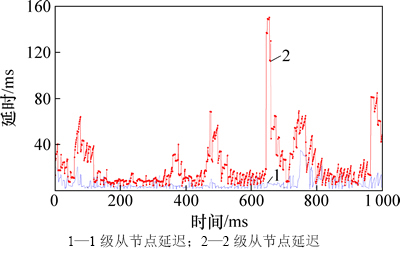
图16 0.1 ms发送周期的系统从节点延迟曲线
Fig. 16 System delay of slaver node under transmission cycle of 0.1 ms
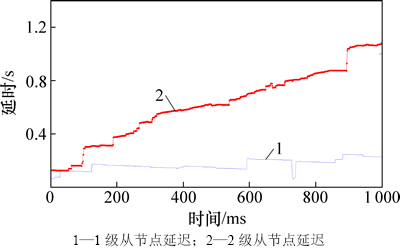
图17 0.01 ms发送周期的系统从节点延迟曲线
Fig. 17 System delay curve of slaver node under transmission cycle of 0.01 ms

图18 0.001 ms发送周期的系统从节点延迟曲线
Fig. 18 System delay curve of slaver node under transmission cycle of 0.001 ms
表1 平均系统从节点延迟结果
Table 1 Average system delay result of slaver node ms

表2 仿真交互信息
Table 2 Interactive information
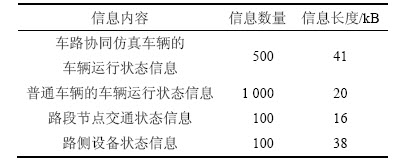
基于HLA开发的车路协同系统详细仿真交互信息如表2所示,仿真信息流如图19所示。
本文采用改进的信息交互策略,为了便于发送和解析不同的信息内容,各信息内容将被独立打包,考虑到仿真交互信息包长度及信息数量,将交互信息打包到大小为500字节左右,以提高单次信息发送效率、减少信息交互频率,达到实时性优化的目的。
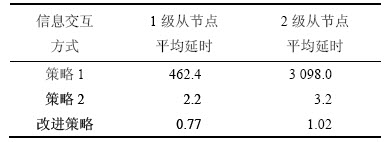
提出的信息交互改进策略对系统测试结果如图20和表3所示,一级系统从节点平均仿真延迟为0.77 ms,二级系统从节点平均仿真延迟为1.02 ms,较策略1及策略2显著减少,较好满足了系统仿真实时性要求。
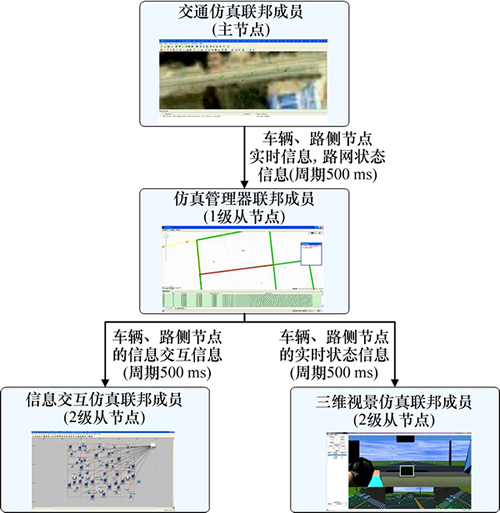
图19 车路协同系统仿真信息流
Fig. 19 IVICS simulation platform
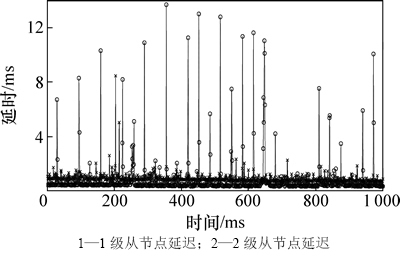
图20 系统从节点延迟
Fig. 20 System delay of slaver node
表3 平均系统从节点延迟结果
Table 3 Average system delay result of slaver node ms
4 结论
1) 基于HLA的车路协同系统仿真框架,设计了基于PTP协议的高精度时钟主动同步方法,对仿真系统的时间管理策略进行了讨论。通过测试,设计了信息交互策略提高了系统的实时性,对仿真系统在该框架下的仿真实时性测试表明所提出的实时性优化方法满足车路协同系统要求,达到了预期的前期开发要求。
2) 目前,构建的车路协同系统仿真平台中各仿真成员只是初步实现了其部分基本功能。要完成构建车路协同仿真系统,实现快速构建面向典型应用的测试场景,实现大规模的车路协同系统功能模拟,需对系统的框架和结构设计、实时信息交互、车车/车路主动安全控制、交通信号协同控制等方面进行有针对性的测试与验证。
参考文献:
[1] Hiroshi M. Smartway project cooperative vehicle highway systems[R]. Washington: Transportation Research Board, 2006: 23.
[2] The California Department of Transportation. A collaboration between the metropolitan transportation commission (MTC) [R].California: Toyota Info Technology Center and Volkswagen of America ERL, 2006: 13.
[3] Yasushi S. ITS radio systems in Japan[R]. Sophia Antipolis: TC ITS Workshop, 2010: 25.
[4] ETSI EN 302 665 V1.1.1, Intelligent transport systems (ITS)-communications architecture[S].
[5] Lina K, Han Z, Fuchs S, et al. Deployment challenges for cooperative systems[R]. Coopers: SafeSpot & CVIS, 2010: 23.
[6] 陈超, 吕植勇, 付姗姗,等. 国内外车路协同系统发展现状综述[J]. 交通信息与安全, 2011, 29(1): 102-105.
CHEN Chao, L Zhiyong, FU Shanshan, et al. Overview of the development in cooperative vehicle-infrastructure system home and abroad[J]. Journal of Transport Information and Safety, 2011, 29(1): 102-105.
Zhiyong, FU Shanshan, et al. Overview of the development in cooperative vehicle-infrastructure system home and abroad[J]. Journal of Transport Information and Safety, 2011, 29(1): 102-105.
[7] 易振国. 车路协同实验测试系统及安全控制技术研究[D]. 长春: 吉林大学交通学院, 2011: 113.
YI Zhenguo. Vehicle infrastructure integration experimental testing system and safety control technology[D]. Changchun: Jilin University. School of Transportation, 2011: 113.
[8] 王国锋, 宋鹏飞, 张蕴灵. 智能交通系统发展与展望[J]. 公路, 2012(5): 217-222.
WANG Guofeng, SONG Pengfei, ZHANG Yunling. Review on development status and future of intelligent transportation system[J]. Highway, 2012(5): 217-222.
[9] 李四辉. 基于 HLA 的车路协同系统仿真方法研究[D]. 北京: 北京交通大学电子信息工程学院, 2012: 69.
LI Sihui. Research on HLA-based simulation for CVIS[D]. Beijing: Beijing Jiaotong University. School of Electronics and Information Engineering, 2012: 69.
[10] 张含, 蔡伯根, 上官伟, 等. 基于多分辨率建模的车路协同系统仿真场景设计与实现[J]. 系统仿真技术, 2013, 9(1): 52-60.
ZHANG Han, CAI Baigen, SHANGGUAN Wei, et al. MR-based CVIS scenario design and implementation[J]. System Simulation Technology, 2013, 9(1): 52-60.
[11] 蔡伯根, 王丛丛, 上官伟, 等. 车路协同系统信息交互仿真方法[J]. 交通运输工程学报, 2014, 14(3): 111-119.
CAI Baigen, WANG Congcong, SHANGGUAN Wei, et al. Simulation method of information interaction in CVIS[J]. Journal of Traffic and Transportation Engineering, 2014, 14(3): 111-119.
[12] 邹智军, 杨东援. 城市道路交通仿真系统软件设计(TgrS)[J]. 交通运输工程学报, 2001, 1(3): 86-88.
ZOU Zhijun, YANG Dongyuan. Software design of urban road traffic simulation system (TgrS)[J]. Journal of Traffic and Transportation Engineering, 2001, 1(3): 86-88.
[13] 钟邦秀, 杨晓光. 面向对象微观交通仿真系统的研究与实现[J]. 系统仿真学报, 2002, 14(4): 418-421.
ZHONG Bangxiu, YANG Xiaoguang. Research and implementation of microscopic traffic simulation based on object-oriented technology[J]. Journal of System Simulation, 2002, 14(4): 418-421.
[14] 李强, 缪立新, 段进宇. 基于驾驶员路径选择的动态交通仿真模型[J]. 公路交通科技, 2001, 18(6): 65-69.
LI Qiang, LAO Lixin, DUAN Jinyu. Route-based dynamic traffic simulation model[J]. Journal of Highway and Transportation Research and Development, 2001, 18(6): 65-69.
[15] Emanuele G, Cavarretta G, Tucci S. HLA-OMNET++: An HLA compliant network simulator[C]//12th IEEE/ACM International Symposium on Distributed Simulation and Real-Time Applications. Vancouver: IEEE, 2008: 1438-1445.
[16] 黄晓冬, 何友, 姜本清. RTI实时性与信息吞吐量的研究与测试 [J]. 系统仿真学报, 2003, 15(4): 516-518.
HUANG Xiaodong, HE You, JIANG Benqing. A test to the real time and throughput performance of RTI [J]. Journal of System Simulation, 2003, 15(4): 516-518.
[17] 黄松, 刘晓明, 宋自林, 等. 网络延迟对基于高层体系结构/运行时支撑构件的分布交互仿真系统的影响[J]. 系统仿真学报, 2002, 14(1): 75-77.
HUANG Song, LIU Xiaoming, SONG Zilin, et al. Effect of network delay on distributed interactive systems based on high level architecture/run time infrastructure[J]. Journal of System Simulation, 2002, 14(1): 75-77.
[18] 徐庚保. 对高层体系结构(HLA)的剖析[J]. 航天控制,2000, 18(2): 59-63.
XU Gengbao. The analysis of high lever architecture[J]. Aerospace Control, 2000, 18(2): 59-63.
[19] 罗红英, 陶英歌. 高层体系结构HLA仿真技术与应用研究 [J]. 战术导弹控制技术, 2007, 15(1): 95-99.
LUO Hongyin, TAO Yinge. Simulation and application of high level of architecture [J]. Control Technology of Tactical Missile, 2007, 15(1): 95-99.
[20] 周彦, 戴剑伟. HLA仿真程序设计 [M]. 1版. 北京: 电子工业出版社, 2002: 12-13.
ZHOU Yan, DAI Jianwei. The HLA simulation programming [M]. 1st ed. Beijing: Publishing House of Electronics Industry, 2002: 12-13.
[21] 汪文俊, 龚育昌, 朱建明. 基于UDP 的局域网内时钟同步协议 [J]. 计算机应用, 2006, 24(5): 133-135.
WANG Wenjun, GONG Yuchang, ZHU Jianming. A time synchronization protocol in local network based on UDP [J]. Computer Applications and Software, 2006, 24(5): 133-135.
(编辑 陈爱华)
收稿日期:2015-02-06;修回日期:2015-05-20
基金项目(Foundation item):国家自然科学基金资助项目(61104162,61273089,61490705);北京市高等学校“青年英才计划”(YETP0538)项目;国际科技合作计划项目(2014DFA80260) (Projects (61104162, 61273089, 61490705) supported by the National Natural Science Foundation of China); Project (YETP0538) supported by the Beijing Higher Education Young Elite Teacher Project; Project (2014DFA80260) supported by the International Science & Technology Cooperation Program of China)
通信作者:上官伟,副教授,博士,从事智能交通研究;E-mail:wshg@bjtu.edu.cn

