
DOI: 10.11817/j.issn.1672-7207.2015.10.051
��·Эͬϵͳ����ʵʱ���Ż�����
���Ļ�1���Ϲ�ΰ1, 2, 3���̲���1������1, 2, 3
(1. ������ͨ��ѧ ������Ϣ����ѧԺ��������100044��
2. ������ͨ��ѧ �����ͨ�����밲ȫ�����ص�ʵ���ң�������100044��
3. ������ͨ��ѧ �����й����ͨ��ż��������ǵ������̼����о����ģ�������100044)
ժ Ҫ��
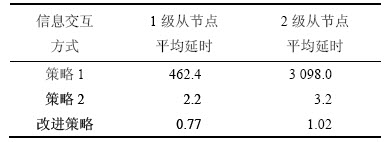
ͬϵͳ�ķ���ؼ�������������·Эͬϵͳ����ƽ̨����Գ�·Эͬϵͳ����ƽ̨�е������Ա��ʵʱ�����⣬�������PTP(precision timing protocol)Э��ĸ߾��ȷ�������ʱ��ͬ�����������۳�·Эͬ���������и��������Ա��ʱ��������ԣ�������ʱ��ͬ����������2����Ϣ���������µ�ϵͳ��ʱ�������·Эͬϵͳ����Ϣ�����Ľ����ԡ�������Խ��������ƽ��ͬ��ʱ�����Ϊ5.69 ��s����Ч����˸��������Ա���ʱ��ͬ�����⣻����ϵͳ��1����2��ϵͳ�ӽڵ�ƽ�������ӳ�Ϊ0.77��1.02 ms���Ϻ����㳵·Эͬϵͳ��������
�ؼ��ʣ�
��ͨ��������·Эͬϵͳ���߲���ϵ�ܹ�����ȷʱ��ͬ��Э����ʵʱ����
��ͼ����ţ�U283.2 ���ױ�־�룺A ���±�ţ�1672-7207(2015)10-3944-10
Cooperative vehicle-infrastructure system simulation strategy and method
LI Sihui1, SHANGGUAN Wei1, 2, 3, CAI Baigen1, WANG Jian1, 2, 3
(1. School of Electronics and Information Engineering, Beijing Jiaotong University, Beijing 100044, China;
2. State Key Laboratory of Rail Traffic Control and Safety, Beijing Jiaotong University, Beijing 100044, China;
3. Beijing Engineering Research Center of EMC and GNSS Technology for Rail Transportation,
Beijing Jiaotong University, Beijing 100044, China)
Abstract: In order to research the key technology on the intelligent vehicle infrastructure cooperative systems (IVICS) simulation and build the simulation platform, high level architecture (HLA)-based simulation framework for IVICS was designed. In view of system demand of real-time capabilities in simulation, a precision timing protocol (PPT) protocol-based highly accurate simulation clock synchronization was designed. Time management strategy for federates was discussed and system delay under two information interaction strategy was tested based on clock synchronization. Then an improved method was proposed. The results show that the average synchronization clock error is 5.69 ��s, and that the average simulation delay from slaver nodes of both level 1 and level 2 system is 0.77 and 1.02 ms respectively, which indicate that the method can effectively resolve clock synchronization problems, and satisfy the requirement of IVICS simulation.
Key words: traffic engineering; intelligent vehicle infrastructure cooperative systems (IVICS); high level architecture (HLA); precision timing protocol (PTP); real-time capabilities
��·Эͬϵͳ(IVICS)�ǻ����Ƚ���ȫʱ�ն�̬��ͨ��Ϣ�ɼ����ںϼ�����ͨ��ȫ��λʵʩ��������·��̬ʵʱ��Ϣ�������г���������ȫ���ƺ͵�·Эͬ�������γ��ˡ�����·��ЧЭͬ�İ�ȫ����Ч�ͻ����ĵ�·��ͨϵͳ[1-8]����·Эͬ�Ľ�ͨϵͳ���ֳ����ڳ���ĸ����ԣ���һ���еķ�����֧�Ż���������Ӧ��������[9-14]���������õ��㷺Ӧ�õĸ߲���ϵ�ṹ(high level architecture��HLA)�Ѿ���֤����һ�ֺ���Ч�ķֲ�ʽϵͳ�����ܣ�����Ч�ؽ�����ϵͳ����ĸ����Բ�ʵ��������������ԡ��ڷ���Ӧ������ŷ������������HLA��Ϊ����·����еı�������ϵ��Emanuele��[15]��HLA��OMNET++���϶�ͨ������Ļ����豸�����˷��档���⣬�ڳ�·Эͬ����Ϣ����ϵͳ�У�OPNET�����ṩ����HLA�Ľӿڣ�ʹ��OPNET���������HLA����ʵ��ͨ�š�HLA���OPNET�Ĺ�����ϣ����Ժܺõ�����ϵͳ����Ҫ����HLA�ķ���ϵͳ֧�ſ�ܶ��ڹ������ж��ν����������ij�·Эͬ����ϵͳ���нϺõ���Ӧ�ԣ��ٿ��ǵ�HLA����Ϣ��������OPNET��ϵ���Խ�ԣ��ڳ�·Эͬϵͳ�����л��ڸ���ϵ��������ϵͳ�������ܽ��з����о����ڳ�·Эͬϵͳ�����У����������Ա����Ϣ�������̴�������������Ƶ�ʸߡ��������̸��ӵ��ص㣬Ϊ������ϵͳ��������500 ms��Ҫ����������HLA���������ʵʱ���Ż�չ���о���HLA�����������紫��������Ҫ�е�����RTI����ˣ����RTIϵͳ�������Ǹ�������ʵʱ�Եĸ���;������������[16]����������Ŀǰ���õ�RTI�汾������ʵʱ�Բ��ԣ������ʾPitch��˾��pRTI������Ƚ϶�������õģ�����Ϣ�Ĵ����ӳ�С��1 ms��Ŀǰ���õĸĽ�����ʵʱ�Եķ����������߳�ģʽ�����ݹ��ˡ�ʱ������㷨�Ľ�����ͨ�����RTI�����ϵͳʵʱ���ܡ���ѡ����RTI�汾���ݻ��ɵ�[17]������ļ��ٳ�Աʱ���ƽ�����Ĵ�������ϵͳʵʱ�Եķ������������������һ�ָĽ�����Ϣ��������������RTI�����������ӳ٣����Ʒ���ϵͳ��ʵʱ���ܡ�
1 ����HLA�ij�·Эͬϵͳ������
�߲���ϵ�ṹ��������������ģ�����칫��(DMSO)�䲼������2000��9�±�IEEE��ʽ����ΪIEEE 1516����HLA�������������������ݷַ��������»��ƣ�ʵ���˷���ڵ��ĵ�Ե�ͨ�Ż��鲥ͨ�ţ����������������������[18-19]��
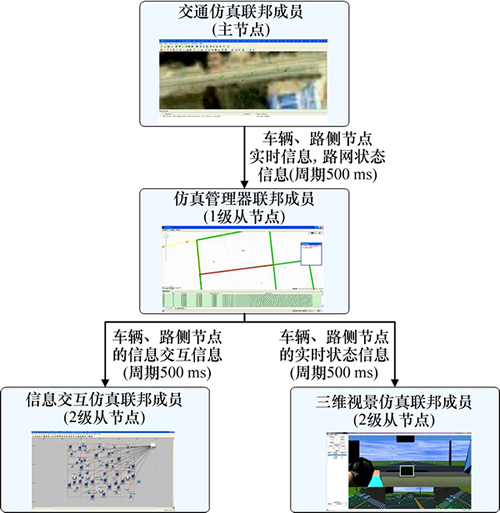
һ������HLA�����ܵķ�������ĵ������ṹ��ͼ1��ʾ[20]��
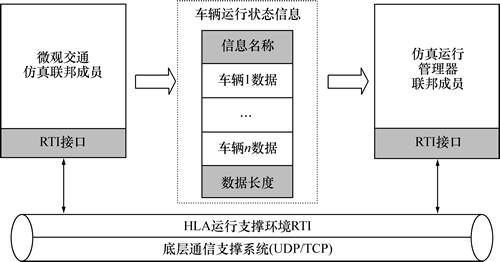
����HLA�ij�·Эͬϵͳ�������г�·Эͬϵͳ����Ϊ�����·Эͬ����ϵͳ�ĸ�����ϵͳ��Ϊ�����Ա����ͬ�������ķ���Ŀ�꣬���������Ա��Ҫ��������ķ�������ͬʱ�����������Ա�����������������Ҫ����Ϣ�������������Ա�ṩ��Ϣ����·Эͬϵͳ������ṹ��ͼ2��ʾ��

ͼ1 ����HLA�ķ���ϵͳ���ṹ
Fig. 1 Logical structure of HLA-based simulation system
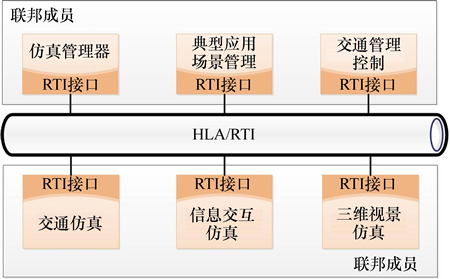
ͼ2 ����HLA��IVICS����������ģ��
Fig. 2 HLA-based logic model for IVICS federation
��ͼ2��֪��IVICS���������6�������Ա���ɣ��������Ա�Ļ������ܽ������£�1) ��������������Ա��Ҫ�����������й������ơ�ʱ���������ֱ泡����ʾ������/��·��Ϣ������������־������2) ����Ӧ�ó������������Ա��Ҫ�����д������������������ȫ��������ʵ��������Ƴ����������������������Ӳ����������ɹ��ܣ��ṩ�������кͽ�ͨ�����������3) ��ͨ�������������Ա��������������н��н�ͨ���ݴ�����ʵ����ؽ�ͨ�����㷨��ͨ�������ںϴ������ɳ�������״̬������Ϣ���źŵƿ��Ʒ�������ͨ��ʾ��Ϣ��4) ��ͨ���������Ա��Ҫ������������ȫʱ�ս�ͨ��Ϣ��ȡ��5) ��Ϣ�������������Ա��Ҫ������Ϣ�������棻6) 3ά�Ӿ����������Ա����ȷ���ij�·Эͬ���泡��ͼ����3ά���泡����
2 ����PTPЭ�������ʱ�ӷ���ͬ������
����HLA�ij�·Эͬϵͳ��������������ܣ���Ҫ��Է��������ڸ��������Ա�ķ���ͬ��������һ���о���
2.1 ����PTPЭ��ĸ߾��ȷ���ʱ��ͬ������
�ڳ�·Эͬ����ϵͳ�У���Ҫһ��ȫ��ʱ���������ƺͼ��ϵͳ״̬�������Ҫ�������и��������Ա��ʱ�����ͳһ��
PTPЭ����IEEE-1588�ж����һ�־���ʱ��ͬ��Э�飬PTPЭ������NTP�����������������á��������翪��С���е㡣������Ҫԭ����ͨ����Ϣ����������ͬ���ź������ԵĶ������д����ڵ��ʱ�ӽ���У��ͬ��������PTPЭ��ʵ�ּ�ռ�õ�����ͼ�����Դ�ٵ��ŵ�ʹ��㷺Ӧ���ڷֲ�ʽ����ϵ ͳ�С�
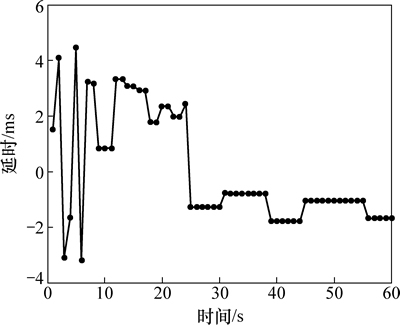
Ϊ�˱�֤ʱ��ͬ���ľ��ȣ����뱣֤ʱ�ӵľ�ȷ��ʱ��Ϊ��ʵ�ָ߾��ȵĶ�ʱ�������뼶��Ķ�ʱ��һ����ø�Ƶ�ʵľ���ʵ�֡���·Эͬ����ϵͳ����VC6.0��Ϊϵͳʵ�����ԣ������CPU�����ʹ���һ���߾��ȵ�ʱ��[21]����Windowsϵͳ�ṩ��API�ӿ�����ȡCPU����Ƶ�ʣ���ˣ�����ͨ��API �ӿ���VC++�й���1���߾��ȵ���ʱ�ӣ����ҿ�������ʱ�䵥λ����ת����VC++�ж���ʵ�ֶ�ʱ�ķ��������л���QueryPerformanceFrequence( )��Query- PerformanceCounter( )�����Ķ�ʱ����ʱ���Ⱥܸߣ�ͨ�����ԣ���·Эͬ����ϵͳ���øú���ʵ�ֵĶ�ʱ���Ķ�ʱ�����������ͼ3��ʾ��
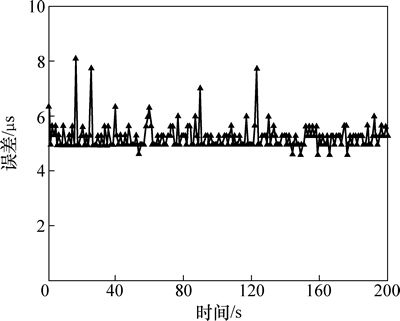
ͼ3 ��ʱ���������
Fig. 3 Curve of timer errors
ͼ3����ʾ����ʱ�ӵ����Ƚ��ȶ���6 ��s���ң������ʵ�ָ߾��ȵ�ʱ��ͬ���ǿ���ʵ�ֵġ�
ͨ��Windowsϵͳ�ṩ�Ľӿڻ�õĸ߾���CPU��Ƶ�ʿ�������ʱ�䵥λ����ת����
ʹ��t0��ʾCPU��ʱ���ļ���ֵ����tΪ��ʱ�������CPU������ƫ���ǰ��ʱ��t������ʽ���죺
 (1)
(1)
���ҵ�ǰ��ʱ��t���Ŀ�ͨ���Ħ�t��ʵ�֡�����Ҫʹ������ʱ�䵥λ��������ʱ��ʱ���ɽ�����Ӧ��ת����ת����ʽ���£�
 (2)
(2)
ʽ�У�t��Ϊ��ʱ�䣬��s��fΪCPUʱ����Ƶ�ʡ�
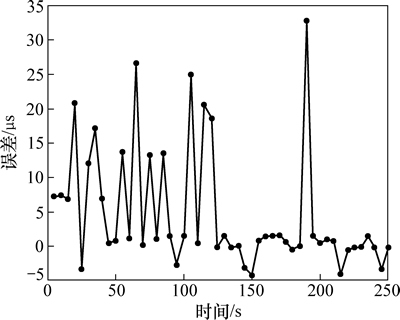
���ĶԻ���PTP��ʱ��ͬ���������в��ԡ������в�����2̨������ͬ�ļ���������ý�������ɾ�����������1̨��Ϊ��ʱ�ӣ�����1̨��Ϊ��ʱ�ӡ���ʱ�Ӳ�������������ԭ������ĸ߾���ʱ�ӣ�CPUƵ��Ϊ2.93 GHz��������ʽt��=t��106/fת�����Ԧ�sΪ��λ����ʱ�ӣ����Թ�����ʱ��ͬ���������ơ�
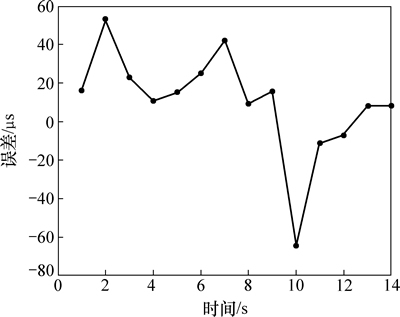
ͼ4 ����ʱ��ͬ�����
Fig. 4 Clock synchronization test errors
����ͼ4���Խ�����������Ϊ-64.38 ��s��ƽ�����Ϊ22.13 ��s����ʵ��Ӧ���У��������������м�������PTPЭ�����ʱ��ͬ�����ܵ��������桢���粻ƽ�����Լ�����ϵͳ���̵ȶ���Ӱ�졣����ϵͳ������ʱ��ͬ�����̺�ʱ��ִ�л����������ʱ�IJ���Ԥ���ԡ�
2.2 ����ʱ��ͬ������
����IJ�ƽ���ԺͲ���ϵͳ���̵��ȵ�Ӱ����ܻ����ʱ��ͬ��ʧЧ����������IJ�ƽ���ԣ����Բ�����Ϣȷ�ϻ�������Ч���������⡣���ڽ��շ��յ���Ϣ��1��ȷ����Ϣ�������ͷ�ֻ���ڽ��շ���ȷ����Ϣ��ŷ�����һ����Ϣ��������2����Ϣ������и��룬ʹ�ý��շ�����һ���յ����ͷ���������Ϣ��Ϊ�˼�Сϵͳ���̵��ȵ�Ӱ�죬�����ڷ���������ר��ʱ��ͬ���̣߳����߳����ȼ�������ߡ�
����ʱ��ͬ�������Ĺ���������ͼ5��ʾ��
1) ��ʱ�ӷ���1��Sync���ĸ���ʱ�ӣ����ڱ����м�¼�����뿪ʱ��t1��
2) ��Sync���ĵ�����ʱ��ʱ����ʱ����������ʱ�ӻظ�Delay_Req���ģ��ñ����к����յ�Sync���ĵ�ʱ��t2�Լ�Delay_Req���ĵķ���ʱ��t3��
3) ����ʱ�ӽ��յ�����Ӧ����ʱ����¼���յ���Ӧ���ĵ�ʱ��t4��ͬʱ��������Re_Resp�����ظ��������̡�
4) ��ʱ�Ӹ��ݳɹ��յ���Ӧ������2�����ĵ�����ʱ�䣬�ֱ�����Դ�˵�Ŀ�Ķ˺ʹ�Ŀ�Ķ˵�Դ�˵�ʱ�ӡ�
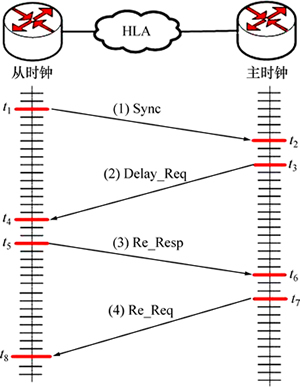
ͼ5 ����ʱ��ͬ������
Fig. 5 Process of active clock synchronization
��ͼ5�ɵã�
 (3)
(3)
 (4)
(4)
 (5)
(5)
 (6)
(6)
ʽ�У�tdelay1ΪSync������ʱ��tdelay2ΪDelay_Req������ʱ��tdelay3ΪRe_Resp������ʱ��tdelay3Ϊ Re_Req������ʱ��
Ϊ�˴��������Ա����л�ȡ��Ч�����ݣ���Ҫ�Բ�õ����ݽ��д�������tdelay1��tdelay2��tdelay3��tdelay4�������ֵ����Сֵ����ô�ʱ�������ʱ����ʱtdelayΪ

 (7)
(7)
ʽ�У�Max( )��ʾȡ���ֵ��Min( )��ʾȡ��Сֵ����ˣ���ʱ���������ʱ�ӵ�ʱ��ƫ��tOffsetΪ
tOffset=tdelay (8)
������Ч������t3-t2��t7-t6���ϴ�ʱ�ı������ݣ�������Ϊϵͳ���̵��ȶ�ʱ��ͬ��Ӱ��ϴԴ˴�ʱ��ͬ�����в�����ã���һ�����ٴν���ͬ����
���Ķ�����ʱ��ͬ���������в��ԣ����Ի���˵�����£�6̨PC��ͨ������������100 MB����LAN����PC��������ͬ��Ӳ��ΪInter(R)Core(TM)2 Duo CPU E7500����Ƶ2.93 GHz��2 GB �ڴ棬Inter(R) 82566 DM -2 Gigabit����������ϵͳΪWindows 7�콢�棻ѡ�����Pitch��˾������pRTITM 1.3��Ϊ�������������ʱ֧�Ż�����
ʵ�ʷ������۽�ͨ���������Ա��Ϊ��ʱ�ӣ����������Ա��Ϊ��ʱ�ӡ�ϵͳ��ʵʱ��Ҫ��Ϊ500 ms��Ϊ��ʵ�ֽϺ�ʱ��ͬ��Ч�����������������������Ա��ͬ������������Ϊ5s������������£���ʱ�Ӵ�0 sʱ�̿�ʼ���������Ե�ʱ��ͬ���������ݣ�ÿ��5s����1��ʱ��ͬ������ʱ�ӷֱ�������ʱ��ͬ���������ʱ�ӻظ���Ӧ�ı��ġ�ͨ��������ԣ��ֱ�۲�����ʱ��ͬ��������ʱ��ͬ�����ȡ�
ͼ6��ʾΪ����ʱ�������ʱ��ͼ7��ʾΪ����ʱ�����ͬ������ͼ6��ͼ7���Կ�������������ʱ��ͬ����������ʱ��ͬ�����ĵ�����ʱ��ƽ�������ʱΪ1.74 ms���������ͬ�����Ϊ32.71 ��s��ƽ��ͬ�����Ϊ5.69 ��s��������������������ʱ��ͬ���������нϸ�ʱ��ͬ�����ȣ�����Ч���㳵·Эͬϵͳ������HLA���滷���²�ͬ�����Ա���ʱ��ͬ������
ͼ6 ����ʱ�������ʱ
Fig. 6 Relative delays between master and slaver clocks
ͼ7 ����ʱ�����ͬ�����
Fig. 7 Relative synchronous errors of master clock
3 ��·Эͬ����ϵͳʵʱ���Ż�
�����Ͻ�����ķ���ʱ��ͬ�������������о�����HLA�����ܵij�·Эͬ����ϵͳ�ķ���ʵʱ���Ż�������
3.1 �����Ա��ʱ���������
����HLA��ϵͳ��������ʱ��һ�㻮��Ϊ2�ࡣ
1) ����ʱ��(ǽ��ʱ��)����Ӧ����ʵ�����е�ʱ�䣬Ҳ�Ƿ���ִ�й����еIJο�ʱ�䣬�磺2013-10-20 18:19:00��
2) ��ʱ�䣬�������Ա������ʱ�����ϵĵ�ǰֵ��
RTI��ʱ�����������ͨ��Э����ʱ�������Ϣ������ʵ�ַ���ʱ����ƽ�����������Ա��ʱ�����Ժ����ϵ�������ֲ��ԶԳ�Ա������Ϸ��ࣺʱ����ں�ʱ�����ޡ�ʱ����ڲ����У������Ա��ʱ�佫�����������ʱ����ϵ��һ�𣬲���������ʱ������¼���������ص������Ա����ʱ�����˳��Ը��¼����д���������ʱ����ڲ��Ե������Ա��ʱ���ƽ��������Щ����ʱ�������Եij�Ա��ʱ���ƽ��������ơ�LBTS(lower bound time constraint)������ʱ�����������Ա��ǰ�ܹ��ƽ�ʱ�������ȡ������Ա���õ�ʱ����Կ�����ʱ��̬�ظı䣬�����Աʱ����м��ǵ��������������ԡ�RTIʱ�������ͼ8��ʾ��
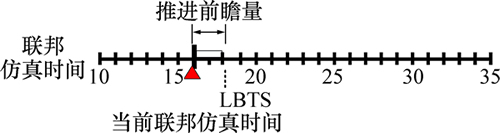
ͼ8 RTIʱ���ƽ�
Fig. 8 Time advance for RTI
���ݳ�·Эͬ����ϵͳ�и��������Ա֮��Ĺ��ܷ��䣬ϵͳ�з������������Ϣ�������桢��ͨ�������ġ���ά�Ӿ�����������Ա��ʱ���ƽ��������ڽ�ͨ�����Ա��ʱ���ƽ�������ͨ�����Ա��ʱ�䲻�����������ԱӰ�졣��ˣ���ϵͳ�и�����Աʱ�������Ϊ2�֣���ͼ9��ʾ��
1) ��ͨ�����Ա���á���ʱ����ơ����ɸó�Ա��ʱ����Ϊϵͳ�ƽ�ʱ�䡣
2) ���������Ա���á���ʱ�����ޡ���ʱ���ƽ���ʽ�����ǵ�ʱ���ƽ����ݽ�ͨ�����Ա��ʱ���ƽ����ƽ���

ͼ9 �����Աʱ���ƽ�����
Fig. 9 Strategy for time advance of Federates
���ݳ�·Эͬ����ϵͳ����ϵͳ��������Ϊ500 ms��Ҳ����˵���������Աÿ500 ms�ڸ���1�����ݡ���ͨ���������Ա��500 msʱ���ڸ������е�ǰ�����Ľ�������ʵʱ��ͨ״̬��Ϣ�����������Աͬʱ�����Ӧ������ֵ���¡���ˣ�ϵͳ���û���ʱ�䲽����ʱ���ƽ���ʽ����ʱ���ƽ�������������£����ȣ���ͨ�����Ա�е����������ʱ���ƽ�����ָ��ϣ���ƽ�������ʱ��ֵ(��ǰϵͳʱ��+ʱ�䲽��)��Ȼ��ͨ��ʱ��ص�������֤ʱ���ƽ��ɹ�����ͨ�����Ա��ʼ����һ��ʱ�䲽���ƽ���
3.2 ��Ϣ��������
��·Эͬϵͳ����ƽ̨�������Ա����Ϣ������������Ϣ����Ƶ�ʽϿ죬Ϊ�˴ﵽ���õ�ϵͳ����ʵʱ��Ч������ȷ�����������Ա�����Ϣ�������ԡ�

ͼ10 ��ƿ����������
Fig. 10 Simulation topology of single bottleneck
��ϵͳ��������У�����RTI�д��ڹ���Ľ�����Ϣʱ����������ܻ��½�����ʱ���������ӵ������·Эͬϵͳ�����о���ƿ����·�ļ��������˽ṹ��ͼ10��ʾ����������������Ա���Ӷ������Ӧ�ã���ϵͳ��������ƿ���ڵ㣬��ˣ���Ϸ�������������Աչ����Ϣ���������о���
ϵͳ����ʵʱ���������Ա����Ϣ������ʽ�йء��������2�������Ա����Ϣ�����ķ�ʽ������ֱ������2����Ϣ�������Բ�ͨ������ϵͳ���ܲ���ʵ�����2�ֲ��Խ��з����Ƚϡ�
3.2.1 ѭ�����͵�������Ϣ
�����ַ�������£������Աÿ�η��͵�����������Ϣ��ѭ��n�θ��������г�����Ϣ����Ϣ����ʾ��ͼ��ͼ11��ʾ����ͼ11��֪���ò����½�����Ϣ�ṹ�����ڷ��ͺͽ����������ڷ�������У����ų�����Ŀ�����ӣ�ϵͳ�����ݷ���Ƶ�����ӣ�������ϵͳ���������㿪�����ܵ�������������Ƽ������ŵ��������ƣ���Ӱ�쵽����ʵʱ�ԡ�
3.2.2 ����������г�����Ϣ
�����ַ�������£������Աһ�δ���������г�������Ϣ����Ϣ����ʾ��ͼ��ͼ12��ʾ����ͼ12��֪���ò�����ϵͳ����Ϣ����Ƶ�ʽ�С�����������ݳ��ȵ��������ܵ��ŵ��������ƻ����RTI��ʱ������Ӱ�쵽����ϵͳ��ʱ��

ͼ11 ������Ϣѭ�����Ͳ���ʾ��ͼ
Fig. 11 Diagram of transmission strategy of information loop by single vehicle
ͼ12 ���Ϣ������Ͳ���ʾ��ͼ
Fig. 12 Diagram of transmission strategy of information loop by more vehicle
3.3 ����ʵʱ�Բ��Է���
����PTPЭ��ĸ߾��ȷ���ʱ��ͬ�������Էֱ����2�ַ�����Թ����ķ�������������ܲ��ԡ��������Ӳ��������2.2���е���ͬ��
���Է���Ϊ������PTPЭ��ĸ߾��ȷ���ʱ��ͬ�������������������ڵ�ͳһͬ��ʱ��Դ������Ϣ������ʱ�������м����Ա�ɻ���ȷ�ĵ�ǰʱ����в��������ճ�Աͨ����ͬ��ʱ��Դ�õ���ʱ���ȥ�ӷ������յ���ʱ���������ӳ١���ʵ�ʲ�����ȡ��Ρ�����-���䡱��Ϣѭ����ͳ��ƽ��ֵ����ʱ�ӡ�
��·Эͬϵͳ�����л�����Ϣ�����ڵ�ʾ��ͼ��ͼ13��ʾ�����ӹ�ϵ����Զ��Եģ���������Ϣ������һ�������Ա��˵�������������ӹ�ϵ��������Ϣ�������Ա��Ϊ���ڵ㣬��������Ϣ�������Ա���Ϊ�ӽڵ㡣�ڳ�·Эͬ����ϵͳ�У��۽�ͨ���������Ա�������ڵ㣬��������������Ա����1���ӽڵ㣬��Ϣ�������������Ա��3ά�Ӿ����������Ա����2���ӽڵ㡣ϵͳ��������Ϊ������Ϣ�����ڵ㵽1���ӽڵ㣬����1���ӽڵ㵽2���ӽڵ��ʱ����̣�ϵͳ��������Ҫ��Ϊ1����2���ӽڵ���ʱ��ӦС��500 ms��
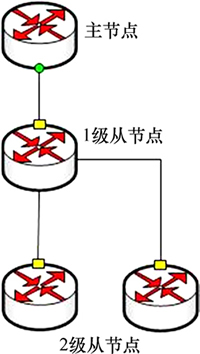
ͼ13 ������Ϣ�����ڵ�ṹͼ
Fig. 13 Organization-chart of basic information interaction node
���ϵͳ�����������ӽڵ�Ľṹ�ֱ��1���ӽڵ㼰2���ӽڵ��ʵʱ�Խ��в��ԡ�
���������ݷ�������Ϊ1 msʱ�������ݰ����ȣ����Ը������ݰ������µ�ϵͳ�ӽڵ��ӳ�[16]�����Խ����ͼ14��ʾ����ͼ14�ɼ����ڹ̶����������£����ŷ������ݰ��������ӣ�ϵͳ1���ӽڵ㼰2���ӽڵ��ӳٶ������ӡ��ɴ˿�֪��������Ϣ��������2�� ���ų������������ӻᵼ��ϵͳ�ӽڵ��ӳ�����

ͼ14 1 ms�������ڵĸ����ݰ������µĴӽڵ��ӳ�����
Fig. 14 System delay curve of slaver node for different data lengthes under transmission cycle of 1 ms
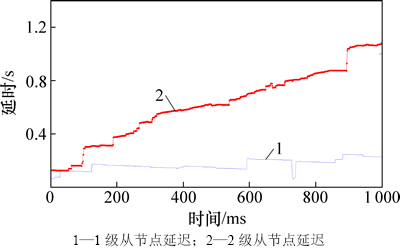
������ݰ�����Ϊ100�ֽ�ʱ����ϵͳ��Ϣ����Ƶ�ʣ��������ݰ������µ�ϵͳ�ӽڵ��ӳ�����ʱ����������Խ����ͼ15~18��ʾ��
�ڲ��Խ���У�����Ϣ�������ڼ�С��һ���̶�ʱ(���IJ��Ի�����Ϊ10-3 ms)�����ڼ�����������������Լ�����ͨ������ӵ�������ŷ���ʱ���������ϵͳ�ӽڵ��ӳ�����������
�ۺ��������Խ�������������Ϣ�����Ľ����ԣ�����ʵ��ϵͳ����������Բ�ȡ2����Ϣ�������Խ�ϵķ�ʽ����ͨ������������ݰ��ķ�ʽ����ŵ������ʣ�ͬʱ����������Ϣ����Ƶ�ʴӶ����ϵͳʵʱ�ԡ�
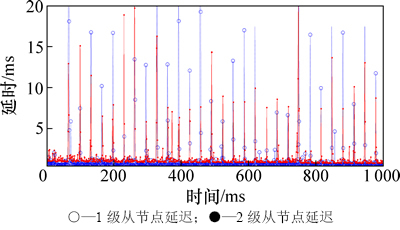
ͼ15 1 ms�������ڵ�ϵͳ�ӽڵ��ӳ�����
Fig. 15 System delay curve of slaver node under transmission cycle of 1 ms
3.4 ��·Эͬϵͳ������֤
Ϊ����֤��������ķ���ϵͳʵʱ���Ż����������Ļ��ڳ�·Эͬ����ƽ̨����ʵʱ�Բ��ԡ���·Эͬ���������Ա�ֲ���6̨��������ն��ϣ���PC��ͨ���������绥�������ɷ���ƽ̨�����л�������1̨RTI����������pRTI����������PC����װ��pRTI�ͻ�������������������ú��Խ��з���������������ԡ�
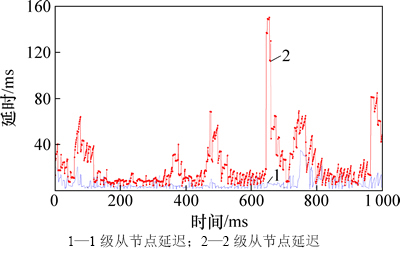
ͼ16 0.1 ms�������ڵ�ϵͳ�ӽڵ��ӳ�����
Fig. 16 System delay of slaver node under transmission cycle of 0.1 ms
ͼ17 0.01 ms�������ڵ�ϵͳ�ӽڵ��ӳ�����
Fig. 17 System delay curve of slaver node under transmission cycle of 0.01 ms

ͼ18 0.001 ms�������ڵ�ϵͳ�ӽڵ��ӳ�����
Fig. 18 System delay curve of slaver node under transmission cycle of 0.001 ms
��1 ƽ��ϵͳ�ӽڵ��ӳٽ��
Table 1 Average system delay result of slaver node ms

��2 ���潻����Ϣ
Table 2 Interactive information
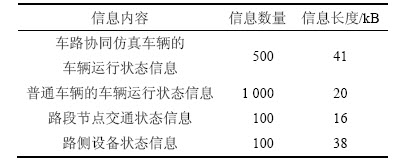
����HLA�����ij�·Эͬϵͳ��ϸ���潻����Ϣ���2��ʾ��������Ϣ����ͼ19��ʾ��
���IJ��øĽ�����Ϣ�������ԣ�Ϊ�˱��ڷ��ͺͽ�����ͬ����Ϣ���ݣ�����Ϣ���ݽ���������������ǵ����潻����Ϣ�����ȼ���Ϣ��������������Ϣ�������СΪ500�ֽ����ң�����ߵ�����Ϣ����Ч�ʡ�������Ϣ����Ƶ�ʣ��ﵽʵʱ���Ż���Ŀ�ġ�
�������Ϣ�����Ľ����Զ�ϵͳ���Խ����ͼ20�ͱ�3��ʾ��һ��ϵͳ�ӽڵ�ƽ�������ӳ�Ϊ0.77 ms������ϵͳ�ӽڵ�ƽ�������ӳ�Ϊ1.02 ms���ϲ���1������2�������٣��Ϻ�������ϵͳ����ʵʱ��Ҫ��
ͼ19 ��·Эͬϵͳ������Ϣ��
Fig. 19 IVICS simulation platform
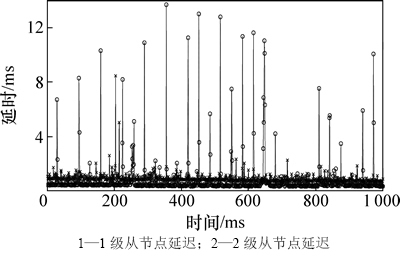
ͼ20 ϵͳ�ӽڵ��ӳ�
Fig. 20 System delay of slaver node
��3 ƽ��ϵͳ�ӽڵ��ӳٽ��
Table 3 Average system delay result of slaver node ms
4 ����
1) ����HLA�ij�·Эͬϵͳ�����ܣ�����˻���PTPЭ��ĸ߾���ʱ������ͬ���������Է���ϵͳ��ʱ��������Խ��������ۡ�ͨ�����ԣ��������Ϣ�������������ϵͳ��ʵʱ�ԣ��Է���ϵͳ�ڸÿ���µķ���ʵʱ�Բ��Ա����������ʵʱ���Ż��������㳵·ЭͬϵͳҪ�ﵽ��Ԥ�ڵ�ǰ�ڿ���Ҫ��
2) Ŀǰ�������ij�·Эͬϵͳ����ƽ̨�и������Աֻ�dz���ʵ�����䲿�ֻ������ܡ�Ҫ��ɹ�����·Эͬ����ϵͳ��ʵ�ֿ��ٹ����������Ӧ�õIJ��Գ�����ʵ�ִ��ģ�ij�·Эͬϵͳ����ģ�⣬���ϵͳ�Ŀ�ܺͽṹ��ơ�ʵʱ��Ϣ����������/��·������ȫ���ơ���ͨ�ź�Эͬ���Ƶȷ������������ԵIJ�������֤��
�ο����ף�
[1] Hiroshi M. Smartway project cooperative vehicle highway systems[R]. Washington: Transportation Research Board, 2006: 23.
[2] The California Department of Transportation. A collaboration between the metropolitan transportation commission (MTC) [R].California: Toyota Info Technology Center and Volkswagen of America ERL, 2006: 13.
[3] Yasushi S. ITS radio systems in Japan[R]. Sophia Antipolis: TC ITS Workshop, 2010: 25.
[4] ETSI EN 302 665 V1.1.1�� Intelligent transport systems (ITS)-communications architecture[S].
[5] Lina K, Han Z, Fuchs S, et al. Deployment challenges for cooperative systems[R]. Coopers: SafeSpot & CVIS, 2010: 23.
[6] �³�, ��ֲ��, ����,��. �����·Эͬϵͳ��չ��״����[J]. ��ͨ��Ϣ�밲ȫ, 2011, 29(1): 102-105.
CHEN Chao, L Zhiyong, FU Shanshan, et al. Overview of the development in cooperative vehicle-infrastructure system home and abroad[J]. Journal of Transport Information and Safety, 2011, 29(1): 102-105.
Zhiyong, FU Shanshan, et al. Overview of the development in cooperative vehicle-infrastructure system home and abroad[J]. Journal of Transport Information and Safety, 2011, 29(1): 102-105.
[7] �����. ��·Эͬʵ�����ϵͳ����ȫ���Ƽ����о�[D]. ����: ���ִ�ѧ��ͨѧԺ, 2011: 113.
YI Zhenguo. Vehicle infrastructure integration experimental testing system and safety control technology[D]. Changchun: Jilin University. School of Transportation, 2011: 113.
[8] ������, ������, ������. ���ܽ�ͨϵͳ��չ��չ��[J]. ��·, 2012(5): 217-222.
WANG Guofeng, SONG Pengfei, ZHANG Yunling. Review on development status and future of intelligent transportation system[J]. Highway, 2012(5): 217-222.
[9] ���Ļ�. ���� HLA �ij�·Эͬϵͳ���淽���о�[D]. ����: ������ͨ��ѧ������Ϣ����ѧԺ, 2012: 69.
LI Sihui. Research on HLA-based simulation for CVIS[D]. Beijing: Beijing Jiaotong University. School of Electronics and Information Engineering, 2012: 69.
[10] �ź�, �̲���, �Ϲ�ΰ, ��. ���ڶ�ֱ��ʽ�ģ�ij�·Эͬϵͳ���泡�������ʵ��[J]. ϵͳ���漼��, 2013, 9(1): 52-60.
ZHANG Han, CAI Baigen, SHANGGUAN Wei, et al. MR-based CVIS scenario design and implementation[J]. System Simulation Technology, 2013, 9(1): 52-60.
[11] �̲���, ���Դ�, �Ϲ�ΰ, ��. ��·Эͬϵͳ��Ϣ�������淽��[J]. ��ͨ���乤��ѧ��, 2014, 14(3): 111-119.
CAI Baigen, WANG Congcong, SHANGGUAN Wei, et al. Simulation method of information interaction in CVIS[J]. Journal of Traffic and Transportation Engineering, 2014, 14(3): 111-119.
[12] ���Ǿ�, �Ԯ. ���е�·��ͨ����ϵͳ�������(TgrS)[J]. ��ͨ���乤��ѧ��, 2001, 1(3): 86-88.
ZOU Zhijun, YANG Dongyuan. Software design of urban road traffic simulation system (TgrS)[J]. Journal of Traffic and Transportation Engineering, 2001, 1(3): 86-88.
[13] �Ӱ���, ������. ��������۽�ͨ����ϵͳ���о���ʵ��[J]. ϵͳ����ѧ��, 2002, 14(4): 418-421.
ZHONG Bangxiu, YANG Xiaoguang. Research and implementation of microscopic traffic simulation based on object-oriented technology[J]. Journal of System Simulation, 2002, 14(4): 418-421.
[14] ��ǿ, ������, �ν���. ���ڼ�ʻԱ·��ѡ��Ķ�̬��ͨ����ģ��[J]. ��·��ͨ�Ƽ�, 2001, 18(6): 65-69.
LI Qiang, LAO Lixin, DUAN Jinyu. Route-based dynamic traffic simulation model[J]. Journal of Highway and Transportation Research and Development, 2001, 18(6): 65-69.
[15] Emanuele G, Cavarretta G, Tucci S. HLA-OMNET++: An HLA compliant network simulator[C]//12th IEEE/ACM International Symposium on Distributed Simulation and Real-Time Applications. Vancouver: IEEE, 2008: 1438-1445.
[16] ������, ����, ������. RTIʵʱ������Ϣ���������о������ [J]. ϵͳ����ѧ��, 2003, 15(4): 516-518.
HUANG Xiaodong, HE You, JIANG Benqing. A test to the real time and throughput performance of RTI [J]. Journal of System Simulation, 2003, 15(4): 516-518.
[17] ����, ������, ������, ��. �����ӳٶԻ��ڸ߲���ϵ�ṹ/����ʱ֧�Ź����ķֲ���������ϵͳ��Ӱ��[J]. ϵͳ����ѧ��, 2002, 14(1): 75-77.
HUANG Song, LIU Xiaoming, SONG Zilin, et al. Effect of network delay on distributed interactive systems based on high level architecture/run time infrastructure[J]. Journal of System Simulation, 2002, 14(1): 75-77.
[18] �����. �Ը߲���ϵ�ṹ(HLA)������[J]. ������ƣ�2000, 18(2): 59-63.
XU Gengbao. The analysis of high lever architecture[J]. Aerospace Control, 2000, 18(2): 59-63.
[19] ��Ӣ, ��Ӣ��. �߲���ϵ�ṹHLA���漼����Ӧ���о� [J]. ս���������Ƽ���, 2007, 15(1): 95-99.
LUO Hongyin, TAO Yinge. Simulation and application of high level of architecture [J]. Control Technology of Tactical Missile, 2007, 15(1): 95-99.
[20] ����, ����ΰ. HLA���������� [M]. 1��. ����: ���ӹ�ҵ������, 2002: 12-13.
ZHOU Yan, DAI Jianwei. The HLA simulation programming [M]. 1st ed. Beijing: Publishing House of Electronics Industry, 2002: 12-13.
[21] ���Ŀ�, ������, �콨��. ����UDP �ľ�������ʱ��ͬ��Э�� [J]. �����Ӧ��, 2006, 24(5): 133-135.
WANG Wenjun, GONG Yuchang, ZHU Jianming. A time synchronization protocol in local network based on UDP [J]. Computer Applications and Software, 2006, 24(5): 133-135.
(�༭ �°���)
�ո����ڣ�2015-02-06�������ڣ�2015-05-20
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(61104162��61273089��61490705)�������иߵ�ѧУ������Ӣ�żƻ���(YETP0538)��Ŀ�����ʿƼ������ƻ���Ŀ(2014DFA80260) (Projects (61104162, 61273089, 61490705) supported by the National Natural Science Foundation of China); Project (YETP0538) supported by the Beijing Higher Education Young Elite Teacher Project; Project (2014DFA80260) supported by the International Science & Technology Cooperation Program of China)
ͨ�����ߣ��Ϲ�ΰ�������ڣ���ʿ���������ܽ�ͨ�о���E-mail��wshg@bjtu.edu.cn
ժҪ��Ϊ���о���·Эͬϵͳ�ķ���ؼ�������������·Эͬϵͳ����ƽ̨����Գ�·Эͬϵͳ����ƽ̨�е������Ա��ʵʱ�����⣬�������PTP(precision timing protocol)Э��ĸ߾��ȷ�������ʱ��ͬ�����������۳�·Эͬ���������и��������Ա��ʱ��������ԣ�������ʱ��ͬ����������2����Ϣ���������µ�ϵͳ��ʱ�������·Эͬϵͳ����Ϣ�����Ľ����ԡ�������Խ��������ƽ��ͬ��ʱ�����Ϊ5.69 ��s����Ч����˸��������Ա���ʱ��ͬ�����⣻����ϵͳ��1����2��ϵͳ�ӽڵ�ƽ�������ӳ�Ϊ0.77��1.02 ms���Ϻ����㳵·Эͬϵͳ��������
[3] Yasushi S. ITS radio systems in Japan[R]. Sophia Antipolis: TC ITS Workshop, 2010: 25.
[4] ETSI EN 302 665 V1.1.1�� Intelligent transport systems (ITS)-communications architecture[S].
[6] �³�, ��ֲ��, ����,��. �����·Эͬϵͳ��չ��״����[J]. ��ͨ��Ϣ�밲ȫ, 2011, 29(1): 102-105.
[7] �����. ��·Эͬʵ�����ϵͳ����ȫ���Ƽ����о�[D]. ����: ���ִ�ѧ��ͨѧԺ, 2011: 113.
[8] ������, ������, ������. ���ܽ�ͨϵͳ��չ��չ��[J]. ��·, 2012(5): 217-222.
[9] ���Ļ�. ���� HLA �ij�·Эͬϵͳ���淽���о�[D]. ����: ������ͨ��ѧ������Ϣ����ѧԺ, 2012: 69.
[10] �ź�, �̲���, �Ϲ�ΰ, ��. ���ڶ�ֱ��ʽ�ģ�ij�·Эͬϵͳ���泡�������ʵ��[J]. ϵͳ���漼��, 2013, 9(1): 52-60.
[11] �̲���, ���Դ�, �Ϲ�ΰ, ��. ��·Эͬϵͳ��Ϣ�������淽��[J]. ��ͨ���乤��ѧ��, 2014, 14(3): 111-119.
[12] ���Ǿ�, �Ԯ. ���е�·��ͨ����ϵͳ�������(TgrS)[J]. ��ͨ���乤��ѧ��, 2001, 1(3): 86-88.
[13] �Ӱ���, ������. ��������۽�ͨ����ϵͳ���о���ʵ��[J]. ϵͳ����ѧ��, 2002, 14(4): 418-421.
[14] ��ǿ, ������, �ν���. ���ڼ�ʻԱ·��ѡ��Ķ�̬��ͨ����ģ��[J]. ��·��ͨ�Ƽ�, 2001, 18(6): 65-69.
[16] ������, ����, ������. RTIʵʱ������Ϣ���������о������ [J]. ϵͳ����ѧ��, 2003, 15(4): 516-518.
[18] �����. �Ը߲���ϵ�ṹ(HLA)������[J]. ������ƣ�2000, 18(2): 59-63.
[19] ��Ӣ, ��Ӣ��. �߲���ϵ�ṹHLA���漼����Ӧ���о� [J]. ս���������Ƽ���, 2007, 15(1): 95-99.
[20] ����, ����ΰ. HLA���������� [M]. 1��. ����: ���ӹ�ҵ������, 2002: 12-13.
[21] ���Ŀ�, ������, �콨��. ����UDP �ľ�������ʱ��ͬ��Э�� [J]. �����Ӧ��, 2006, 24(5): 133-135.
