基于SVM与多振动信息融合的齿轮故障诊断
蒋玲莉1, 2,刘义伦1,李学军2,陈安华2
(1. 中南大学 机电工程学院,湖南 长沙,410083;
2. 湖南科技大学 机械设备健康维护湖南省重点实验室,湖南 湘潭,411201)
摘 要:针对齿轮振动信号故障特征微弱以及单个传感器故障诊断可靠性与准确性低等问题,采用多传感器信息融合方法,利用支持向量机(SVM)对8路齿轮振动信号进行特征级融合,实现故障诊断。研究结果表明:基于多个传感器单个特征量信息融合的齿轮故障诊断率比常规的基于单个传感的多个特征量的诊断准确率更高,诊断结果更可靠;峰值因子对齿轮故障最敏感,以峰值因子为特征量的多传感器信息融合,诊断准确率达93.33%。
关键词:多振动信号;信息融合;SVM;故障诊断;齿轮
中图分类号:TH 165+.3 文献标志码:A 文章编号:1672-7207(2010)06-2184-05
Gear fault diagnosis based on SVM and multi-sensor
information fusion
JIANG Ling-li1, 2, LIU Yi-lun1, LI Xue-jun2, CHEN An-hua2
(1. School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China;
2. Hunan Provincial Key Laboratory of Health Maintenance for Mechanical Equipment,
Hunan University of Science and Technology, Xiangtan 411201, China)
Abstract: To solve the problems that the vibration signals from a gearbox are usually noisy and it is difficult to find a potential failure in a gearbox by a single sensor, using support vector machine (SVM) as a tool for feature-level information fusion, eight gear vibration signals for fault diagnosis were investigated. The results show that the method for gear fault diagnosis based on multi-sensors information fusion has higher reliability and accuracy than that based on a single sensor. The crest factor is the most sensitive character for gear failure and the diagnostic accuracy rate reaches 93.33% by using the character to perform multi-sensor information fusion.
Key words: multi-vibration signal; information fusion; SVM (support vector machine); fault diagnosis; gear
齿轮及齿轮箱是机械设备中必不可少的连接和传递动力的通用零部件,传动机械中约80%及旋转机械中约10%的故障是由齿轮引起的,对齿轮进行状态监测与故障诊断可减少不必要的经济损失,创造更大的经济效益和社会效益。齿轮故障诊断的困难在于振动信号在传递中经过的环节较多(齿轮―轴―轴承―轴承座―齿轮箱―测点),特征信息衰减损耗大,且在多种零部件振动的复杂作用下,信号中的干扰激励多,因此,现场测试的振动信号成分复杂,反映齿轮状态的特征信息相对微弱。要对单个传感器信号进行分析,需借助于信号分析技术,以达到提高信噪比和有效地提取故障特征的目的[1]。相对于单个传感器,采用多个传感器扩展了时空范围,可获得更多的信息量,更全面地描述诊断对象。利用多传感器信息融合可通过简单的特征提取技术获得更全面准确的诊断结果。多传感器信息融合分为3个级别:数据级融合、特征级融合和决策级融合[2]。目前,信息融合在故障诊断领域的应用大多为多类信号特征级融合,如对同一诊断对象的振动、温度、压力等信号进行融合[3-4],其在数据获取过程中必须使用多类传感器及其配套仪器设备,从而导致监测成本提高,并给实际操作过程带来诸多不便。对同类信号的融合多停留在数据级加权融合[5-6],其权值确定过程复杂,实时性差,融合后仍需借助信号分析技术进一步提取故障特征和判断决策。对多个振动信号的同一特征指标进行融合分析,属于同类信号的特征级融合。在数据获取过程中,只需一套振动信号测试系统,且不存在权值确定的复杂问题,诊断过程快速、简单。故障诊断领域的特征级融合实际属于模式识别问题,基于神经网络的模式识别方法在齿轮故障诊断中得到广泛应用。支持向量机(SVM)比神经网络具有更强的泛化能力,它较好地解决了小样本学习分类问题,能够在有限特征信息情况下,最大限度地发掘样本数据中隐含的分类知识,解决神经网络无法避免的局部极值问题及维数灾难问题。这些优点对机械故障诊断具有很强的实际价值,并在故障诊断实际应用中表现出明显优越性[7-9]。时域统计量是最早用于齿轮故障诊断的诊断参量,其提取过程简单、直观,但基于单个传感器的时域统计量诊断准确率低,本文作者采用支持向量机对多个传感器时域统计量进行特征级信息融合,以便最终实现较精确的齿轮故障诊断。
1 齿轮箱多振动信号采集
齿轮振动测试实验在美国SpectraQuest公司的机械故障综合模拟实验台上进行,该实验台可模拟机械设备常见故障,用于故障诊断研究。选用8个传感器对齿轮振动进行监测,实验台及传感器布置如图1所示。由于实验台齿轮箱的支承部位不便安装传感器,故8个传感均布置于齿轮箱外部,其中,s1~s4安装于齿轮箱体上,s5~s8安装于齿轮箱体基座的4个角端。采用奥地利Dewetron公司DEWE-16通道高精度测试系统及美国PCB608A11加速度传感器组成测试系统,采样频率为20 kHz。
在实验过程中,由电机驱动转子-轴承系统通过皮带传动输入转速于齿轮箱,齿轮箱传递的全部动力由磁力制动器吸收。齿轮传动部分主要由2对啮合斜齿轮、输入轴、中间轴和输出轴等零部件组成,其传递机构如图2所示(其中,z为测试齿轮)。
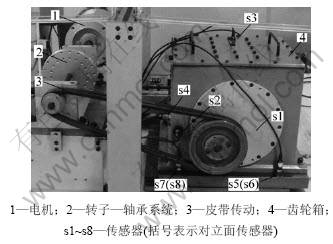
图1 机械故障综合模拟实验台及传感器布置图
Fig.1 Layout of sensors on machinery fault simulator
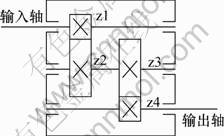
图2 齿轮箱传动简图
Fig.2 Diagram of gearbox drive
机械故障综合模拟实验台配备了齿面点蚀与断齿故障件,如图3所示,可根据需要替换图2中的齿轮z1。
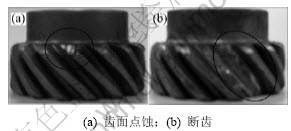
图3 故障齿轮
Fig.3 Defective gears
本文主要讨论正常状态、齿面点蚀和断齿的故障诊断。在齿轮传动系统运行期间,齿轮箱的故障和缺陷将导致其结构的物理效应复杂化,从而在齿轮信号中得到反映。
2 多振动信号信息融合
机械设备故障诊断的关键是根据所获得的故障特征向量进行模式分类与识别,将多传感器信息融合技术应用于齿轮故障诊断,充分利用多个传感器资源,提高诊断精度与可信度。多传感器特征级信息融合模型如图4所示,提取8个传感器的同一特征量组成8维特征向量,利用支持向量机进行模式识别。分别选用常用的12个时域统计量进行分析、比较。
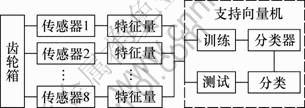
图4 信息融合模型
Fig.4 Model of multi-sensor information fusion
2.1 时域统计量
本文所用的12个时域统计量如表1所示[10-11]。表中xi(i=1, 2, …, n)为实验采集的时序信号。
表1 时域统计量
Table 1 Statistics in time-domain

2.2 支持向量机
支持向量机是建立在统计学习理论和结构风险最小化原理基础上的新型机器学习方法[12],其分类方法是从线性可分情况下的最优分类面提出的。设有2类线性可分样本集(xi, yi) (xi Rd;yi{-1, +1};i=1, 2, …, n),支持向量机将保证分类间隔最大的最优分类面问题转化为求解凸二次优化问题:
Rd;yi{-1, +1};i=1, 2, …, n),支持向量机将保证分类间隔最大的最优分类面问题转化为求解凸二次优化问题:
 (1)
(1)
式中: 为权重向量;b为偏置;
为权重向量;b为偏置; 为松弛因子;C为惩罚因子。
为松弛因子;C为惩罚因子。
通过拉格朗日定理,可得到上述优化问题的对偶描述:
 (2)
(2)
式中: 为拉格朗日系数,根据Karush-Kuhn-Tucker互补条件,必须满足
为拉格朗日系数,根据Karush-Kuhn-Tucker互补条件,必须满足
 (3)
(3)
对于取值不为0的 ,式(1)中
,式(1)中 ≥
≥ 的等号成立,对应的样本称之为支持向量,它揭示了对分类起关键作用的是训练样本中的一部分,即处于分布边缘地带的样本。
的等号成立,对应的样本称之为支持向量,它揭示了对分类起关键作用的是训练样本中的一部分,即处于分布边缘地带的样本。
求解上述问题,得到最优分类函数:
 (4)
(4)
式中:l为支持向量数目。
若样本集(xi, yi) (xiRd;yi{-1, +1};i=1, 2, …, n)线性不可分,则可通过非线性映射 将输入空间的样本映射到高维线性可分特征空间H中,在H中构造最优分类面。非线性映射
将输入空间的样本映射到高维线性可分特征空间H中,在H中构造最优分类面。非线性映射 在一般情况下难以求解,支持向量机通过核函数K(xi, xj)巧妙地解决了这个问题。对于满足Mercer条件的核函数K(xi, xj),存在以下对应关系:
在一般情况下难以求解,支持向量机通过核函数K(xi, xj)巧妙地解决了这个问题。对于满足Mercer条件的核函数K(xi, xj),存在以下对应关系:
 (5)
(5)
将式(5)代入式(4),可得线性不可分样本最优分类函数:
 (6)
(6)
常用的核函数有线性核函数、多项式核函数、径向基核函数以及Sigmoid核函数。
标准支持向量机解决的是二分类问题,而故障诊断领域需要解决的是多分类问题。目前,已经提出的一些有效的多分类支持向量机包括一对多、一对一、有向无环图、二叉树、纠错编码等。
3 齿轮故障诊断实例分析
3.1 多传感器信息融合分析
取实验采集的3种状态下的齿轮振动信号,每种状态110组(共330组)数据用于故障模式识别,在每组数据中提取8个传感器的1个统计量构成8维的特征向量,组成330×8的数据样本集,选用每种状态60组共180组样本用于训练SVM模型,其余样本用于测试。对12个时域统计量进行分析。
使用LibSVM-mat-2.9[13-14]进行SVM计算;选用径向基核函数,即
 ;采用交叉验证与网络搜索法对惩罚因子C及核函数参数g进行优化选择;采用一对一进行多类判别。在大多数情况下,径向基核函数与一对一多分类法将获得更高的分类精度[13-14]。
;采用交叉验证与网络搜索法对惩罚因子C及核函数参数g进行优化选择;采用一对一进行多类判别。在大多数情况下,径向基核函数与一对一多分类法将获得更高的分类精度[13-14]。
基于不同时域统计量与支持向量机的多传感器信息融合诊断结果如表2所示。总测试样本诊断精度可反映特征量对齿轮故障的敏感程度。从表2可见:峰值因子对齿轮故障最敏感,利用其组成特征向量,诊断准确率达93.33%,其次分别为幅值平方和、方根幅值、均值、均方根、标准差、峰值,诊断准确率均在80%以上,偏度、峭度、波形因子、裕度因子对齿轮故障敏感性较差,诊断准确率均在70%以下。
表2 多传感器信息融合诊断结果
Table 2 Diagnostic results with multi-sensor information fusion
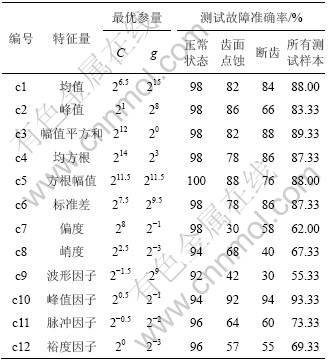
从表2可知:正确样本的诊断准确率均在90%以上,表明正常状态与故障状态容易辨别,适合新设备尚缺故障样本情况下的定性故障诊断(判断是否存在故障);故障程度(齿面点蚀与断齿)容易混淆,需谨慎选择特征量。
3.2 与单个传感器对比分析
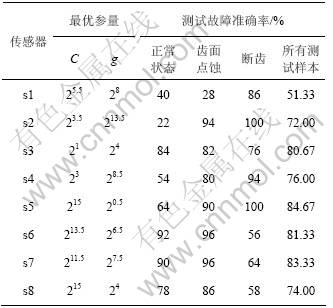
取单个传感器的8个时域统计量(表2中诊断精度高的前8个特征量)组成8维特征向量,构成数据样本。为避免不同特征量的数量级差别对SVM分类结果的影响,在SVM训练与测试前对特征向量进行归一化处理,测试结果表明归一化处理对诊断精度有明显影响。而多传感器信息融合中采用多个传感器的同一特征量作为特征向量,不存在数量级差别,无需归一化处理,故过程更简单。分别对8个传感器进行分析,诊断结果如表3所示。从表2和表3可以看出:多传感器信息融合诊断精度高于单个传感器诊断精度。各个传感器的诊断精度差异较大,这与传感器布置位置有关,此结果可为传感器优化布置提供依据。多传感器信息融合传感器布置覆及整个齿轮箱,其布置位置对诊断结果影响不大,诊断结果更可靠。
表3 单个传感器诊断结果
Table 3 Diagnostic results with single sensor
4 结论
(1) 基于多传感器信息融合的齿轮故障诊断比单个传感器诊断准确率更高,诊断结果更可靠。
(2) 峰值因子对齿轮故障最敏感,以其为特征量的多传感器信息融合,诊断准确率达93.33%。
参考文献:
[1] 丁康, 李巍华, 朱小勇. 齿轮及齿轮箱故障诊断实用技术[M]. 北京: 机械工业出版社, 2005: 1-4.
DING Kang, LI Wei-hua, ZHU Xiao-yong. Practical technology of gear and gear box fault diagnosis[M]. Beijing: China Machine Press, 2005: 1-4.
[2] 韩崇昭, 朱洪艳, 段战胜, 等. 多源信息融合[M]. 北京: 清华大学出版社, 2006: 4-11.
HAN Chong-zhao, ZHU Hong-yan, DUAN Zhan-sheng, et al. Multi-source information fusion[M]. Beijing: Tsinghua University Press, 2006: 4-11.
[3] 贺建军, 赵蕊. 基于信息融合技术的大型水轮发电机故障诊断[J]. 中南大学学报: 自然科学版, 2007, 32(2): 333-338.
HE Jian-jun, ZHAO Rui. Hydroelectric generating sets fault diagnosis based on information fusion technology[J]. Journal of Central South University: Science and Technology, 2007, 32(2): 333-338.
[4] Basir O, Yuan X. Engine fault diagnosis based on multi-sensor information fusion using Dempster-Shafer evidence theory[J]. Information Fusion, 2007, 8(4): 379-386.
[5] 李学军, 李萍, 褚福磊. 基于相关函数的多振动信号数据融合方法[J]. 振动、测试与诊断, 2009, 29(2): 179-183.
LI Xue-jun, Li Ping, Chu Fu-lei. Data fusion of multi-sensor vibration signal using correlation function[J]. Journal of Vibration, Measurement & Diagnosis, 2009, 29(2): 179-183.
[6] 谭青, 向阳辉. 加权证据理论信息融合方法在故障诊断中的应用[J]. 振动与冲击, 2008, 27(4): 112-116.
TAN Qing, XIANG Yang-hui. Application of weighted evidential theory and its information fusion method in fault diagnosis[J]. Journal of Vibration and Shock, 2008, 27(4): 112-116.
[7] Widodo A, Yang B S. Support vector machine in machine condition monitoring and fault diagnosis[J]. Mechanical Systems and Signal Processing, 2007, 21(6): 2560-2574.
[8] 于德介, 杨宇, 程军圣. 一种基于SVM和EMD的齿轮故障诊断方法[J]. 机械工程学报, 2005, 41(1): 140-144.
YU De-jie, YANG Yu, CHENG Jun-sheng. Fault diagnosis approach for gears based on EMD and SVM[J]. Chinese Journal of Mechanical Engineering, 2005, 41(1): 140-144.
[9] Samanta B. Gear fault detection using artificial neural networks and support vector machines with genetic algorithms[J]. Mechanical Systems and Signal Processing, 2004, 18(3): 625-644.
[10] LEI Ya-guo, HE Zheng-jia, ZI Yang-yang, et al. New clustering algorithm-based fault diagnosis using compensation distance evaluation technique[J]. Mechanical Systems and Signal Processing, 2008, 22(2): 419-435.
[11] YANG Jun-yang, ZHANG You-yun, ZHU Yong-sheng. Intelligent fault diagnosis of rolling element bearing based on SVMs and statistical characteristics[C]//Proceedings of the 2007 International Manufacturing Science and Engineering Conference. Atlanta, 2007: 525-536.
[12] Cristianini N, Shawe-Taylor J. An introduction to support vector machines and other kernel-based learning methods[M]. Cambridge: Cambridge University Press, 2000: 24-46.
[13] Hsu C, Chang C C, Lin C J. A practical guide to support vector classification[EB/OL]. [2009-05-19]. http://www.csie.ntu.edu. tw/~cjlin.
[14] Hsu C, Lin C J. A comparison of methods for multi-class support vector machines[J]. IEEE Transactions on Neural Networks, 2002, 13(2): 415-425.
(编辑 赵俊)
收稿日期:2009-11-15;修回日期:2010-03-01
基金项目:国家自然科学基金资助项目(50775070);湖南省自然科学基金重点资助项目(09JJ8005)
通信作者:蒋玲莉(1981-),女,湖南永州人,博士研究生,从事信号处理与机械故障智能诊断研究;电话:15573216060;E-mail: linlyjiang@163.com

