履带采矿车海底斜坡地形的转向控制算法
王随平,桂卫华,彭亮
(中南大学 信息科学与工程学院,湖南 长沙,410083)
摘要:采矿车在海底斜坡上行走作业时的转向控制受诸多参数制约,我国矿区的海底海泥力学性质、采矿车海底斜坡坡度、采矿车转向方式与坡度相对关系、海底沉积物特性以及未知扰动等因素对采矿车转向过程和转向驱动方式均产生多参数耦合的作用。通过分析转向过程中采矿车与海底底质的作用力关系,建立了采矿车在海底斜坡转向的运动学模型,设计了以最优控制器为核心的转向控制系统。转向控制系统考虑了在采矿车斜坡上转向行走的打滑和扰动等因素,提高了转向过程中对轨迹跟踪的控制精度,保证了采矿车的安全行走作业。仿真结果验证了所设计的转向控制算法的有效性。
关键词:深海采矿车;海底斜坡转向;转向模型
中图分类号:TP391.9 文献标志码:A 文章编号:1672-7207(2011)S2-0301-06
Deep-sea slope controlling algorithm of mining vehicle
WANG Sui-ping, GUI Wei-hua, PENG Liang
(School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: The mining vehicle’s turning control process is restricted by many factors while working on the deep-sea slope. For instance, the mechanical properties of the deep-sea mud, the grade of the slope, the relativity between the turning direction and gradient, turning speed and angle, the slip rate, the electro-hydraulic drive system and other unknown disturbances all have definite link with the coupling effect of mining vehicle’s parameters during the steering course. The force relationship between the tracked vehicle and the seabed was analyzed. The kinematics model of the mining vehicle was deduced as driving on the slope. The optimal steering controller was designed as a key determinant of the turning control system. Since the turning control system takes the skidding and disturbances into account, the tracking accuracy of the mining vehicle is enhanced and the driving safety on the slope is also ensured. And the results show the validity of this algorithm.
Key words: deep-sea mining vehicle; deep-sea slope; kinematics turning model
深海底采矿车工作于6 km深的海底环境中,海底极稀软底质和各种扰动的存在对采矿车的行走控制起着很大的影响。设计合理的控制算法对于提高采矿车的行走性能起着关键作用则更为重要。因此,针对采矿车转向控制技术的研究对于提高海底采矿车的控制精度,特别是当采矿车行驶于海底坡度地形时,对采矿车转向策略、转向行走控制参数的优化效率以及安全作业有着重要意义。
1 采矿车斜坡转向过程分析
采矿车的转向运动是在海底行走时所受到的外力作用的结果,其转向过程可以分解为随车体中心的平移运动和绕其中心的旋转运动,因此,采矿车在转向过程中同时受到由于接地段的平移运动造成的纵向阻力和旋转运动造成的横向阻力的作用,如果采矿车高速转向,还应考虑离心力造成的影响。为了适应深海底极稀软底质的特殊行走环境,深海底采矿车为经过特殊设计的履带行走车辆,深海底采矿车并未设置专门的转向机构,而是通过控制左、右履带的速度差形成滑差转向,在滑差转向时采矿车一条履带的牵引力增加,而另一条履带的牵引力减小,从而产生转向力矩,来克服转向阻力矩实现转向[1]。
海底采矿车履带较常规履带宽,而且具有特殊的窄尖三角齿剪切履刺。图1所示为履带采矿车斜坡平面瞬时转向受力图。图1中,采矿车的内、外侧履带的牵引力分别为Fo和Fi,相应的内、外侧纵向地面阻力分别为Rro和Rri,纵向和侧向的摩擦因数分别为μr和μl,C为采矿车的几何中心,B为履带中心矩,F为离心力,o′为瞬时转向中心,R为转向半径。图1中虚线所示为采矿车的运动轨迹。角度α为考虑离心力的作用时,采矿车瞬时转向中心与车体几何中心在运动方向上产生的横摆角。然而,由于海底采矿车在海底斜坡平面转向时速度较低,受离心力的影响较小, 因而认为深海底采矿车的瞬时转向中心和车体的几何中心重合,并且将采矿车侧向力的分布F1到F4视为4个相等的三角形,采矿车转向时地面受力分析如图2所示。
2 深海底采矿车斜坡转向控制算法研究与仿真
2.1 控制原理
采矿车在斜坡上沿预定路径行走时通过控制左、右履带速度实现转向[2],其转向的轨迹跟踪控制精度是影响采矿效率的关键因素,转向控制系统的输入为转向过程中的位置偏差和方位角,输出为采矿车左、右履带的期望速度,ve为采矿车输入的预定行走速度,通过左、右履带的速度差实现转向过程中对预定轨迹的跟踪,整个控制系统的原理图如图3所示。
整个采矿车斜坡转向控制系统由最优控制器模块、速度转换器模块、液压系统模块、轨迹推算模块、路径比较器模块和运动参数在线估计模块6个主要模块组成,各模块的功能如下。
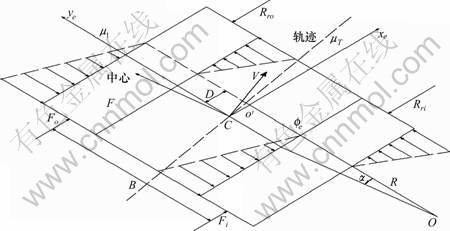
图1 斜坡转向瞬时受力示意图
Fig.1 Schematic diagram of instantaneous force when slope turning
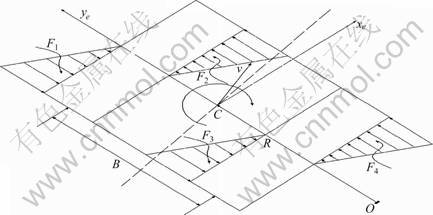
图2 斜坡转向瞬时受力简化示意图
Fig.2 Simplified diagram of instantaneous force when slope turning
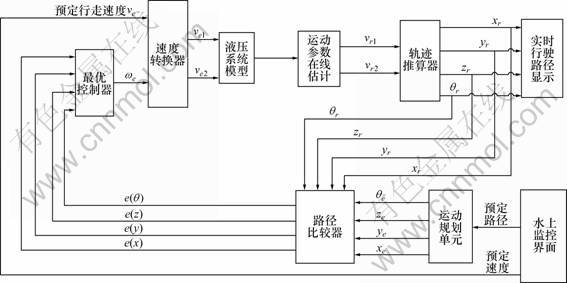
图3 海底采矿车转向控制原理图
Fig.3 Schematic diagram of control principle of seabed mining vehicle steering
最优控制器模块实现深海底采矿车运动学模型映射。通过对采矿车海底行驶参数的在线计算将采矿车的海底干扰、打滑等因素考虑在内,建立海底运动学模型,以位置偏差e(x),e(y),e(z)和方位角偏差e(θ)为输入状态量,输出为采矿车的期望角速度ωe,通过控制采矿车的转向角速度来跟踪转向过程中的预定轨迹[3]。
速度转换器模块由期望角速度获得采矿车的期望速度差控制参量。由于采矿车的转向控制是通过左、右履带的速度差来实现,所以在采矿车进行转向控制时,需将采矿车的期望角速度ωe转换为左、右履带的期望速度ve1和ve2,将ve1和ve2作为直接控制量来控制采矿车的转向。
液压系统模块乃采矿车液电驱动系统的数学描述。海底采矿车液压驱动系统模块由电液比例阀、控制液压缸、泵柱塞-流量、柱塞马达4部分组成,其输入量为电信号,输出量为马达转速,通过马达的转动从而带动履带的行走。
轨迹推算模块承担了采矿车行走阶段的轨迹积算。输入量为采矿车左、右履带的实际行驶速度ve1和ve2,输出为采矿车的实际位置状态xr,yr,zr和实际方位角θr,通过实时路径显示可以看到采矿车的实际行走轨迹。
路径比较器模块获得采矿车转向过程的轨迹偏差。此模块中预定了采矿车的转向轨迹,将采矿车的实际运动状态[xr, yr, zr, θr]作为输入量与预定转向轨迹的期望运动状态[xe, ye, ze, θe]进行比较,得到采矿车在转向过程中的轨迹跟踪偏差e(x),e(y),e(z)和e(θ)。
主要运动参数在线估计模块据海底行走底质环境变化实现采矿车运动位姿的补偿估计。海底环境随机性较大,也可能随着路况的不同履带产生的打滑与沉陷情况也不相同,运动在线计算模块可以估计采矿车即时打滑状况和左、右驱动轮沉陷情况,从而可以求出采矿车左、右履带的即时速度,对深海底采矿车实际的运动状态的精确测量起着重要作用。
2.2 轨迹推算模块设计
轨迹推算模块承担采矿车海地行走的阶段轨迹积算。海底采矿车在斜坡上行驶的速度可以分解为x 轴、y轴和z轴3个方向的分速度,从而将深海采矿车在海底斜坡上的转向过程可以分解为采矿车沿x轴,y轴方向和沿z轴方向的加速运动,如图4所示,其中v为车体的行驶速度,vsin θ为采矿车沿y轴方向的分速度,采矿车沿斜坡行驶方向的分速度vcos θ又可分解为沿x轴和z轴方向的分速度,各分速度具体表达式如下。
 (1)
(1)
式中:vx,vy和vz分别为采矿车实际行驶速度vr沿x轴,y轴和z轴方向的分速度,m/s;θ为采矿车在斜坡上转向方位角,rad。
采矿车在海底斜坡的转向过程可以分为上坡转向、下坡转向和侧坡转向3种主要类型,其不同转向过程相应的动力学模型也有区别,因而采矿车转向过程中所受到的各分力也有所不同[4-5]。根据采矿车在海底斜坡不同转向过程的行驶特点,以及预定采矿轨迹“直线+半圆弧+直线”的设计规则,可以识别出采矿车在斜坡上的转向类型,并由运动学公式计算出采矿车的实际行走位置。将采矿车在斜坡转向过程分为n个阶段,则每个阶段都可以看作空间匀加速运动的合成,得到采矿车在各转向过程中的实际位置坐标可表示为
 (2)
(2)
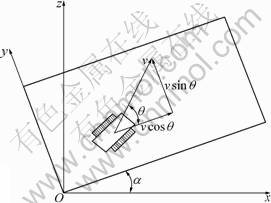
图4 采矿车斜坡行驶速度分解图
Fig.4 Decomposition map of mining truck ramp speed
2.3 仿真
通过以上对转向控制系统各模块的分析,按照转向控制整体原理结构图将各模块进行连接,仿真模型如图5所示。
为了模拟海底斜坡行驶的打滑情况在仿真中加入随机打滑模块,得到的行走路径跟踪和误差仿真曲线如图6所示。
3 深海采矿车行走控制系统原理概述
深海底采矿车行走控制系统由位于采矿船上的海上监控系统和位于采矿车上的水下控制器两部分组成,两部分之间由6 km的复合电缆连接,通过复合电缆的作用,海上监控系统和水下控制器之间可以传递视频和音频信号、高压电和光信号等信号,使得两部分互相通信,共同完成对海底采矿车的行走控制,整个控制系统的结构如图7所示。
海上监控系统由对海底采矿车进行监视和控制的主操作台及其相关的计算机、服务器组成。为了完成对海底采矿车的监视工作,还需要相应的声学定位、图像声纳系统和视频信号监视器来进行相关工作。通过海上监控系统可以在海上工作室查看采矿车的行驶轨迹和实时位置以及相关的行驶数据,并且可以通过对采矿车的参数进行调整来完成对采矿车行走的调整与控制。而当采矿车的行走轨迹偏差过大特别是在海底斜坡上转向行驶出现危险情况时,可以及时产生报警信息,提醒工作人员对采矿车进行行走控制。海上监控系统还可以通过以太网与采矿系统中的其他部分相互通信,实现各种控制信息的共享,共同完成对海底采矿车行走的实时控制。
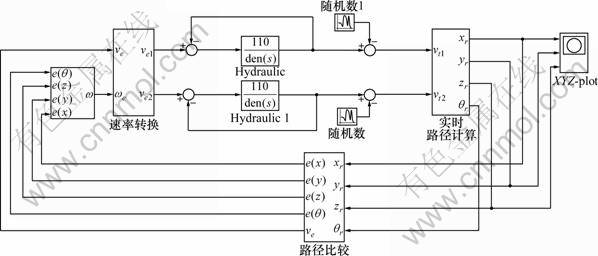
图5 海底采矿车转向控制仿真模型
Fig.5 Simulation model of seabed mining vehicle steering control
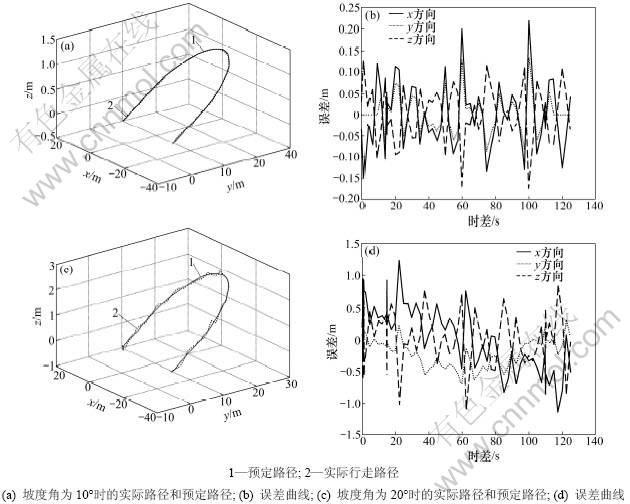
图6 R=15 m条件下的上坡路径跟踪及其误差仿真曲线
Fig.6 Tracking and error simulation curves of uphill path at R of 15 m
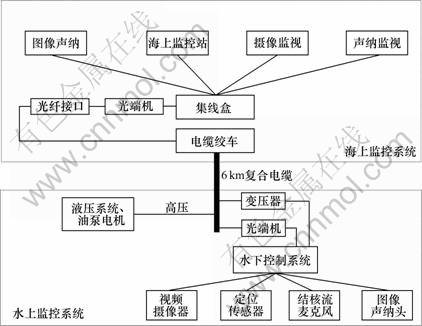
图7 深海采矿车行走控制系统结构图
Fig.7 System structure of deep-sea mining trucks passing control
4 结论
在采矿车斜坡转向动力学模型和转向控制器算法的基础上,通过MATLAB/Simulink对不同转向半径、斜坡倾角和转向类型进行试验仿真,得到了在各种情形下的仿真结果。仿真结果表明,海底采矿车在考虑打滑的情况下,对于一定范围内的斜坡倾角和转向半径,该斜坡转向控制器能够较好地完成在海底斜坡行驶时的预定开采路径的跟踪控制任务,并且其控制精度达到了采矿车所需的控制性能指标,并且对于斜坡倾角较大的时可能出现的安全情况等起到了一定的预见作用,对于开采前的路径规划也有参考作用。
参考文献:
[1] 史力晨, 王良曦, 张兵志, 等. 履带车辆在坚实地面转向瞬态过程模拟计算[J]. 车辆与动力技术, 2003(1): 27-33.
SHI Li-chen, WANG Liang-xi, ZHANG Bing-zhi, et al. Dynamic simulation of tracked vehicle turning performance on hard surface[J]. Vehicle & Power Technology, 2003(1): 27-33.
[2] 卢文涛, 李永奎, 邓志刚, 等. 自行走车辆转向控制算法及MATLAB的实现[J]. 沈阳农业大学学报, 2005, 36(3): 358-360.
LUO Wen-tao, LI Yong-kui, DENG Zhi-gang, et al. Steer control arithmetic of automatic vehicle and the present in MATLAB[J]. Journal of Shenyang Agricultural University, 2005, 36(3): 358-360.
[3] 李力, 邹兴龙. 海底机器人自动跟踪预定开采路径控制[J]. 机械工程学报, 2007, 43(1): 152-157.
LI Li, ZHOU Xing-long. Seafloor robots control on tracking automatically planning mining paths[J]. Chinese Journal of Mechanical Engineering, 2007, 43(1): 152-157.
[4] van der Merwe R, de Freitas N, Doucet A, et al. The unscented particle filter[C]//Process Syst, Adv Neural Inform, 2000: 21-25.
[5] Meyer C, Rosch A. Superconvergence properties of optimal control problems[J]. SIAM Journal on Control and Optimization, 2005, 43(3): 970-985.
(编辑 龙怀中)
收稿日期:2011-06-15;修回日期:2011-07-15
基金项目:国际海底区域研究开发“十五”项目(DY105-03-02-06);国家自然科学基金资助项目(60505018)
通信作者:王随平(1956-),男,河南焦作人,博士,教授;从事人工智能、深海机器人、现场总线、计算机控制系统等的研究;电话:13975818874;E-mail: wangsp@csu.edu.cn

