
�Ĵ��ɿ���б�µ��ε�ת������㷨
����ƽ��������������
(���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ������ ��ɳ��410083)
ժ Ҫ��
����������ҵʱ��ת���������������Լ���ҹ������ĺ�������ѧ���ʡ��ɿ���б���¶ȡ��ɿ�ת��ʽ���¶���Թ�ϵ�����׳����������Լ�δ֪�Ŷ������ضԲɿ�ת����̺�ת��������ʽ�������������ϵ����á�ͨ������ת������вɿ��뺣���ʵ���������ϵ�������˲ɿ��ں���б��ת����˶�ѧģ�ͣ�����������ſ�����Ϊ���ĵ�ת�����ϵͳ��ת�����ϵͳ�������ڲɿ�б����ת�����ߵĴ��Ŷ������أ������ת������жԹ켣���ٵĿ��ƾ��ȣ���֤�˲ɿİ�ȫ������ҵ����������֤������Ƶ�ת������㷨����Ч�ԡ�
�ؼ��ʣ�
��ɿ�������б��ת����ת��ģ����
��ͼ����ţ�TP391.9 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S2-0301-06
Deep-sea slope controlling algorithm of mining vehicle
WANG Sui-ping, GUI Wei-hua, PENG Liang
(School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: The mining vehicle��s turning control process is restricted by many factors while working on the deep-sea slope. For instance, the mechanical properties of the deep-sea mud, the grade of the slope, the relativity between the turning direction and gradient, turning speed and angle, the slip rate, the electro-hydraulic drive system and other unknown disturbances all have definite link with the coupling effect of mining vehicle��s parameters during the steering course. The force relationship between the tracked vehicle and the seabed was analyzed. The kinematics model of the mining vehicle was deduced as driving on the slope. The optimal steering controller was designed as a key determinant of the turning control system. Since the turning control system takes the skidding and disturbances into account, the tracking accuracy of the mining vehicle is enhanced and the driving safety on the slope is also ensured. And the results show the validity of this algorithm.
Key words: deep-sea mining vehicle; deep-sea slope; kinematics turning model
��ײɿ�����6 km��ĺ������У�����ϡ�����ʺ����Ŷ��Ĵ��ڶԲɿ����߿������źܴ��Ӱ�졣��ƺ����Ŀ����㷨������߲ɿ������������Źؼ��������Ϊ��Ҫ����ˣ���Բɿ�ת����Ƽ������о�������ߺ��ײɿĿ��ƾ��ȣ��ر��ǵ��ɿ���ʻ�ں����¶ȵ���ʱ���Բɿ�ת����ԡ�ת�����߿��Ʋ������Ż�Ч���Լ���ȫ��ҵ������Ҫ���塣
1 �ɿ�б��ת����̷���
�ɿ�ת���˶����ں�������ʱ���ܵ����������õĽ������ת����̿��Էֽ�Ϊ�泵�����ĵ�ƽ���˶����������ĵ���ת�˶�����ˣ��ɿ���ת�������ͬʱ�ܵ����ڽӵضε�ƽ���˶���ɵ�������������ת�˶���ɵĺ������������ã�����ɿ���ת��Ӧ������������ɵ�Ӱ�졣Ϊ����Ӧ���ϡ�����ʵ���������������ײɿ�Ϊ����������Ƶ��Ĵ����߳�������ײɿ�δ����ר�ŵ�ת�����������ͨ�����������Ĵ����ٶȲ��γɻ���ת���ڻ���ת��ʱ�ɿ�һ���Ĵ���ǣ�������ӣ�����һ���Ĵ���ǣ������С���Ӷ�����ת�����أ����˷�ת��������ʵ��ת��[1]��
���ײɿ��Ĵ��ϳ����Ĵ��������Ҿ��������խ�����dzݼ����Ĵ̡�ͼ1��ʾΪ�Ĵ��ɿ�б��ƽ��˲ʱת������ͼ��ͼ1�У��ɿ��ڡ�����Ĵ���ǣ�����ֱ�ΪFo��Fi����Ӧ���ڡ����������������ֱ�ΪRro��Rri������Ͳ����Ħ�������ֱ�Ϊ��r�ͦ�l��CΪ�ɿļ������ģ�BΪ�Ĵ����ľأ�FΪ��������o��Ϊ˲ʱת�����ģ�RΪת��뾶��ͼ1��������ʾΪ�ɿ��˶��켣���ǶȦ�Ϊ����������������ʱ���ɿ�˲ʱת�������복�弸���������˶������ϲ����ĺ�ڽǡ�Ȼ�������ں��ײɿ��ں���б��ƽ��ת��ʱ�ٶȽϵͣ�����������Ӱ���С�� �����Ϊ��ײɿ�˲ʱת�����ĺͳ���ļ��������غϣ����ҽ��ɿ������ķֲ�F1��F4��Ϊ4����ȵ������Σ��ɿ�ת��ʱ��������������ͼ2��ʾ��
2 ��ײɿ�б��ת������㷨�о������
2.1 ����ԭ��
�ɿ���б������Ԥ��·������ʱͨ�����������Ĵ��ٶ�ʵ��ת��[2]����ת��Ĺ켣���ٿ��ƾ�����Ӱ��ɿ�Ч�ʵĹؼ����أ�ת�����ϵͳ������Ϊת������е�λ��ƫ��ͷ�λ�ǣ����Ϊ�ɿ������Ĵ��������ٶȣ�veΪ�ɿ������Ԥ�������ٶȣ�ͨ�������Ĵ����ٶȲ�ʵ��ת������ж�Ԥ���켣�ĸ��٣���������ϵͳ��ԭ��ͼ��ͼ3��ʾ��
�����ɿ�б��ת�����ϵͳ�����ſ�����ģ�顢�ٶ�ת����ģ�顢Һѹϵͳģ�顢�켣����ģ�顢·���Ƚ���ģ����˶��������߹���ģ��6����Ҫģ����ɣ���ģ��Ĺ������¡�
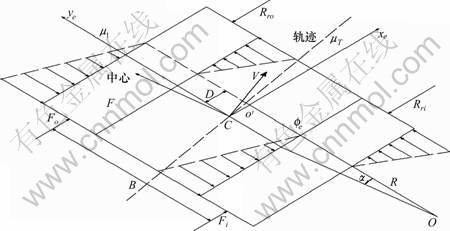
ͼ1 б��ת��˲ʱ����ʾ��ͼ
Fig.1 Schematic diagram of instantaneous force when slope turning
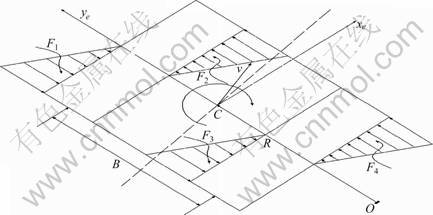
ͼ2 б��ת��˲ʱ������ʾ��ͼ
Fig.2 Simplified diagram of instantaneous force when slope turning
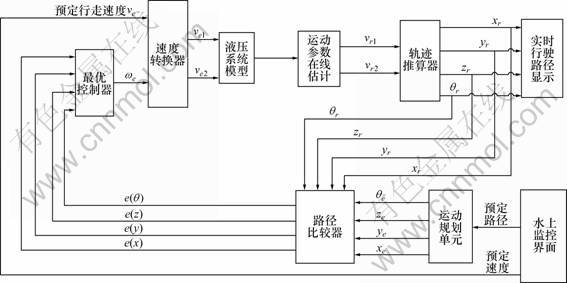
ͼ3 ���ײɿ�ת�����ԭ��ͼ
Fig.3 Schematic diagram of control principle of seabed mining vehicle steering
���ſ�����ģ��ʵ����ײɿ��˶�ѧģ��ӳ�䡣ͨ���Բɿ�����ʻ�����������㽫�ɿĺ����š������ؿ������ڣ����������˶�ѧģ�ͣ���λ��ƫ��e(x)��e(y)��e(z)�ͷ�λ��ƫ��e(��)Ϊ����״̬�������Ϊ�ɿ��������ٶȦ�e��ͨ�����Ʋɿ�ת����ٶ�������ת������е�Ԥ���켣[3]��
�ٶ�ת����ģ�����������ٶȻ�òɿ������ٶȲ���Ʋ��������ڲɿ�ת�������ͨ�������Ĵ����ٶȲ���ʵ�֣������ڲɿ���ת�����ʱ���轫�ɿ��������ٶȦ�eת��Ϊ�����Ĵ��������ٶ�ve1��ve2����ve1��ve2��Ϊֱ�ӿ����������Ʋɿ�ת��
Һѹϵͳģ���˲ɿ�Һ������ϵͳ����ѧ���������ײɿ�Һѹ����ϵͳģ���ɵ�Һ������������Һѹ�ס�������-��������������4������ɣ���������Ϊ���źţ������Ϊ����ת�٣�ͨ�������ת���Ӷ������Ĵ������ߡ�
�켣����ģ��е��˲ɿ����߽εĹ켣���㡣������Ϊ�ɿ������Ĵ���ʵ����ʻ�ٶ�ve1��ve2�����Ϊ�ɿ�ʵ��λ��״̬xr��yr��zr��ʵ�ʷ�λ�Ǧ�r��ͨ��ʵʱ·����ʾ���Կ����ɿ�ʵ�����߹켣��
·���Ƚ���ģ���òɿ�ת����̵Ĺ켣ƫ���ģ����Ԥ���˲ɿ�ת��켣�����ɿ�ʵ���˶�״̬[xr, yr, zr, ��r]��Ϊ��������Ԥ��ת��켣�������˶�״̬[xe, ye, ze, ��e]���бȽϣ��õ��ɿ���ת������еĹ켣����ƫ��e(x)��e(y)��e(z)��e(��)��
��Ҫ�˶��������߹���ģ��ݺ������ߵ��ʻ����仯ʵ�ֲɿ��˶�λ�˵IJ������ơ�����������Խϴ�Ҳ��������·���IJ�ͬ�Ĵ������Ĵ���������Ҳ����ͬ���˶�������ģ����Թ��Ʋɿ�ʱ��״�������������ֳ���������Ӷ���������ɿ������Ĵ��ļ�ʱ�ٶȣ�����ײɿ�ʵ�ʵ��˶�״̬�ľ�ȷ����������Ҫ���á�
2.2 �켣����ģ�����
�켣����ģ��е��ɿ������ߵĽι켣���㡣���ײɿ���б������ʻ���ٶȿ��Էֽ�Ϊx �ᡢy���z��3������ķ��ٶȣ��Ӷ�����ɿ��ں���б���ϵ�ת����̿��Էֽ�Ϊ�ɿ���x�ᣬy�᷽�����z�᷽��ļ����˶�����ͼ4��ʾ������vΪ�������ʻ�ٶȣ�vsin ��Ϊ�ɿ���y�᷽��ķ��ٶȣ��ɿ���б����ʻ����ķ��ٶ�vcos ���ֿɷֽ�Ϊ��x���z�᷽��ķ��ٶȣ������ٶȾ������ʽ���¡�
 (1)
(1)
ʽ�У�vx��vy��vz�ֱ�Ϊ�ɿ�ʵ����ʻ�ٶ�vr��x�ᣬy���z�᷽��ķ��ٶȣ�m/s����Ϊ�ɿ���б����ת��λ�ǣ�rad��
�ɿ��ں���б�µ�ת����̿��Է�Ϊ����ת������ת��Ͳ���ת��3����Ҫ���ͣ��䲻ͬת�������Ӧ�Ķ���ѧģ��Ҳ����������ɿ�ת����������ܵ��ĸ�����Ҳ������ͬ[4-5]�����ݲɿ��ں���б�²�ͬת����̵���ʻ�ص㣬�Լ�Ԥ���ɿ�켣��ֱ��+��Բ��+ֱ�ߡ�����ƹ�����ʶ����ɿ���б���ϵ�ת�����ͣ������˶�ѧ��ʽ������ɿ�ʵ������λ�á����ɿ���б��ת����̷�Ϊn���Σ���ÿ���ζ����Կ����ռ��ȼ����˶��ĺϳɣ��õ��ɿ��ڸ�ת������е�ʵ��λ������ɱ�ʾΪ
 (2)
(2)
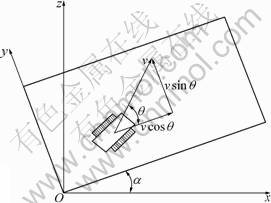
ͼ4 �ɿ�б����ʻ�ٶȷֽ�ͼ
Fig.4 Decomposition map of mining truck ramp speed
2.3 ����
ͨ�����϶�ת�����ϵͳ��ģ��ķ���������ת���������ԭ���ṹͼ����ģ��������ӣ�����ģ����ͼ5��ʾ��
Ϊ��ģ�⺣��б����ʻ�Ĵ�����ڷ����м��������ģ�飬�õ�������·�����ٺ�������������ͼ6��ʾ��
3 ��ɿ����߿���ϵͳԭ������
��ײɿ����߿���ϵͳ��λ�ڲɿ��ϵĺ��ϼ��ϵͳ��λ�ڲɿ��ϵ�ˮ�¿�������������ɣ�������֮����6 km�ĸ��ϵ������ӣ�ͨ�����ϵ��µ����ã����ϼ��ϵͳ��ˮ�¿�����֮����Դ�����Ƶ����Ƶ�źš���ѹ����źŵ��źţ�ʹ�������ֻ���ͨ�ţ���ͬ��ɶԺ��ײɿ����߿��ƣ���������ϵͳ�Ľṹ��ͼ7��ʾ��
���ϼ��ϵͳ�ɶԺ��ײɿ��м��ӺͿ��Ƶ�������̨������صļ��������������ɡ�Ϊ����ɶԺ��ײɿļ��ӹ���������Ҫ��Ӧ����ѧ��λ��ͼ������ϵͳ����Ƶ�źż�������������ع�����ͨ�����ϼ��ϵͳ�����ں��Ϲ����Ҳ鿴�ɿ���ʻ�켣��ʵʱλ���Լ���ص���ʻ���ݣ����ҿ���ͨ���ԲɿIJ������е�������ɶԲɿ����ߵĵ�������ơ������ɿ����߹켣ƫ������ر����ں���б����ת����ʻ����Σ�����ʱ�����Լ�ʱ����������Ϣ�����ѹ�����Ա�Բɿ������߿��ơ����ϼ��ϵͳ������ͨ����̫����ɿ�ϵͳ�е����������ͨ�ţ�ʵ�ָ��ֿ�����Ϣ�Ĺ�������ͬ��ɶԺ��ײɿ����ߵ�ʵʱ���ơ�
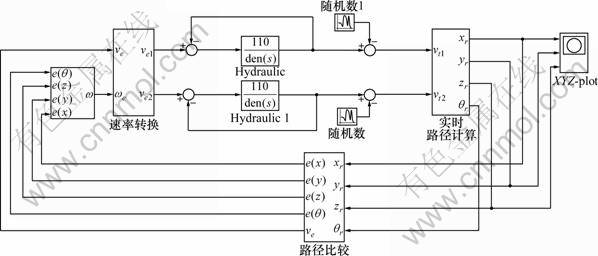
ͼ5 ���ײɿ�ת����Ʒ���ģ��
Fig.5 Simulation model of seabed mining vehicle steering control
ͼ6 R=15 m�����µ�����·�����ټ�������������
Fig.6 Tracking and error simulation curves of uphill path at R of 15 m
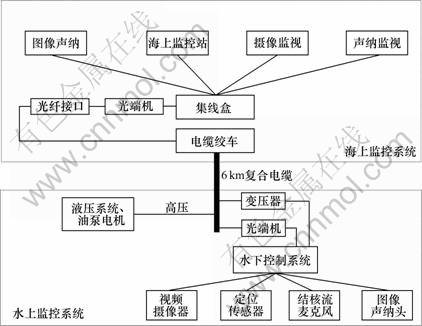
ͼ7 ��ɿ����߿���ϵͳ�ṹͼ
Fig.7 System structure of deep-sea mining trucks passing control
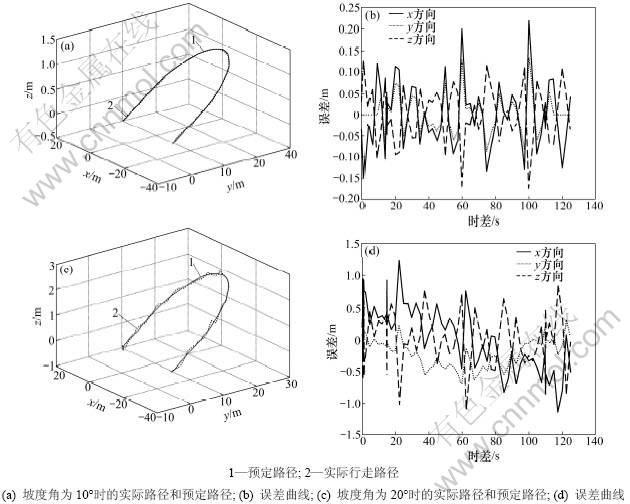
4 ����
�ڲɿ�б��ת����ѧģ�ͺ�ת��������㷨�Ļ����ϣ�ͨ��MATLAB/Simulink�Բ�ͬת��뾶��б����Ǻ�ת�����ͽ���������棬�õ����ڸ��������µķ����������������������ײɿ��ڿ��Ǵ�����£�����һ����Χ�ڵ�б����Ǻ�ת��뾶����б��ת��������ܹ��Ϻõ�����ں���б����ʻʱ��Ԥ������·���ĸ��ٿ�������������ƾ��ȴﵽ�˲ɿ�����Ŀ�������ָ�꣬���Ҷ���б����ǽϴ��ʱ���ܳ��ֵİ�ȫ���������һ����Ԥ�����ã����ڿ���ǰ��·���滮Ҳ�вο����á�
�����:
[1] ʷ����, ������, �ű�־, ��. �Ĵ������ڼ�ʵ����ת��˲̬����ģ�����[J]. �����붯������, 2003(1): 27-33.
SHI Li-chen, WANG Liang-xi, ZHANG Bing-zhi, et al. Dynamic simulation of tracked vehicle turning performance on hard surface[J]. Vehicle & Power Technology, 2003(1): 27-33.
[2] ¬����, ������, ��־��, ��. �����߳���ת������㷨��MATLAB��ʵ��[J]. ����ũҵ��ѧѧ��, 2005, 36(3): 358-360.
LUO Wen-tao, LI Yong-kui, DENG Zhi-gang, et al. Steer control arithmetic of automatic vehicle and the present in MATLAB[J]. Journal of Shenyang Agricultural University, 2005, 36(3): 358-360.
[3] ����, ������. ���������Զ�����Ԥ������·������[J]. ��е����ѧ��, 2007, 43(1): 152-157.
LI Li, ZHOU Xing-long. Seafloor robots control on tracking automatically planning mining paths[J]. Chinese Journal of Mechanical Engineering, 2007, 43(1): 152-157.
[4] van der Merwe R, de Freitas N, Doucet A, et al. The unscented particle filter[C]//Process Syst, Adv Neural Inform, 2000: 21-25.
[5] Meyer C, Rosch A. Superconvergence properties of optimal control problems[J]. SIAM Journal on Control and Optimization, 2005, 43(3): 970-985.
(�༭ ������)
�ո����ڣ�2011-06-15�������ڣ�2011-07-15
������Ŀ�����ʺ��������о�������ʮ�塱��Ŀ(DY105-03-02-06)��������Ȼ��ѧ����������Ŀ(60505018)
ͨ�����ߣ�����ƽ(1956-)���У����Ͻ����ˣ���ʿ�����ڣ������˹����ܡ�������ˡ��ֳ����ߡ����������ϵͳ�ȵ��о����绰��13975818874��E-mail: wangsp@csu.edu.cn
ժҪ���ɿ��ں���б����������ҵʱ��ת���������������Լ���ҹ������ĺ�������ѧ���ʡ��ɿ���б���¶ȡ��ɿ�ת��ʽ���¶���Թ�ϵ�����׳����������Լ�δ֪�Ŷ������ضԲɿ�ת����̺�ת��������ʽ�������������ϵ����á�ͨ������ת������вɿ��뺣���ʵ���������ϵ�������˲ɿ��ں���б��ת����˶�ѧģ�ͣ�����������ſ�����Ϊ���ĵ�ת�����ϵͳ��ת�����ϵͳ�������ڲɿ�б����ת�����ߵĴ��Ŷ������أ������ת������жԹ켣���ٵĿ��ƾ��ȣ���֤�˲ɿİ�ȫ������ҵ����������֤������Ƶ�ת������㷨����Ч�ԡ�
