DOI: 10.11817/j.issn.1672-7207.2016.12.011
电磁法仪器高精度GPS同步系统设计
于生宝,何建龙,苏发,李刚,孙长玉
(吉林大学 仪器科学与电气工程学院,吉林 长春,130061)
摘要:为了提高电磁法勘探仪器同步系统的同步精度和抗干扰性,提出一种新的基于全球定位系统(GPS)和恒温晶振(OCXO)的同步系统方案。通过对GPS秒脉冲特性和OCXO频率特性的分析,采用卡尔曼滤波对秒脉冲中的随机噪声进行滤波处理,提高其精度。并以处理后的秒脉冲信号作为基准在线校正OCXO基本时钟,保证其输出频率的精度。采用具有电磁兼容设计的MC9S12XS128微控制器实现秒脉冲的卡尔曼滤波和OCXO在线PID校正,提高系统的抗干扰能力。研究结果表明:GPS锁定时同步脉冲精度稳定在25 ns以内。该方案提高同步系统的同步精度和抗干扰性,同时可以提高仪器野外工作的效率。
关键词:电磁法仪器;GPS同步;卡尔曼滤波;OCXO校正
中图分类号:TH763.1 文献标志码:A 文章编号:1672-7207(2016)12-4035-06
Design of high precision synchronization system for electromagnetic instruments
YU Shengbao, HE Jianlong, SU Fa, LI Gang, SUN Changyu
(College of Instrumentation and Electrical Engineering, Jilin University, Changchun 130061, China)
Abstract: To improve the synchronization precision and anti-interference of electromagnetic instruments, a new scheme of synchronization system was proposed based on Global Positioning System and oven controlled crystal oscillator (OCXO) clock. By analyzing the GPS second pulse characteristics and OCXO frequency characteristics, Kalman filter was adopted to eliminate the random noise in second pulse. In order to guarantee the accuracy of OCXO frequency, on-line PID control method was used to correct the OCXO. The reference signal of the controller is the filtered second pulse. MC9S12XS128 was used in the control unit to realize Kalman filter algorithm and OCXO PID correction. The results show that synchronization precision is stable within 25 ns when the GPS is locked. The proposed scheme improves the precision and anti-interference of the synchronization system. The efficiency of the instruments can be enhanced.
Key words: electromagnetic instrument; GPS synchronization; Kalman filter; OCXO correction
电磁法勘探技术作为地球物理勘探的重要技术之一[1],广泛应用于矿产资源勘探、地质构造探测、水文工程勘察[2]、地质调查、环境调查与检测等领域。电磁法勘探仪器的研制也成为国内外地球物理探测领域的热点[3-4]。为了提高电磁法勘探仪器采集数据的质量,通常需要多个采集系统之间或采集系统和发射系统之间精准同步。所以精度高,稳定性好,可靠性高的同步系统是电磁法勘探仪器的重要组成部分。提高同步精度是获取高质量的采集数据的基础,高精度时钟源是提高同步精度的关键。GPS同步不受距离和地形影响,同步精度高[5]。特别是全球定位系统的完善,使得GPS同步被广泛应用于同步系统设计[6-7]。但是GPS模块在接收信号良好的情况下,输出的秒脉冲会与世界标准时间(UTC)之间存在不具有累积效应的随机误差,会影响同步系统的精度。采用恒温晶振(OCXO)作为时钟源的同步方式的特点是频率稳定度很高,但是随着时间的推移会出现老化等现象,输出频率会偏移标称值并随时间累积,所以长时间工作同步精度会大为降低。通常电磁法勘探仪器野外工作环境比较复杂,仪器本身易受工作环境的影响,所以提高同步系统的抗干扰能力是保证仪器同步正常工作的基础。文献[8]通过相位补偿算法校正生成秒脉冲,在GPS锁定时同步精度可达到25 ns。但其采用的晶振模型与实现算法比较复杂。PULFORD[9]采用DSP对秒脉冲信号进行采样,并利用最优估计的方法对噪声滤波,可以提高GPS定位授时精度。但是没有考虑晶振漂移带来的误差。杜茗茗等[10]设计的GPS与温补晶振协同工作的同步控制器,同步精度优于200 ns。为了解决上面所述的问题,本文作者采用微控制器对秒脉冲信号时间间隔进行采样,并用卡尔曼滤波的方法对噪声滤波,然后以秒脉冲作为基准校正OCXO输出频率,保证了同步脉冲的精度。设计电路简单,可靠性高,可以提高同步系统的同步精度和抗干扰能力。
1 系统方案设计
1.1 同步系统总体方案
图1所示为同步系统的总体结构和各功能单元的内部结构框图。
OCXO提供时钟信号作为Freescale微控制器的系统时钟源。微控制器捕获秒脉冲信号的时间间隔,并利用卡尔曼滤波对其进行处理。将处理后的秒脉冲时间间隔减去给定值,转换成时间间隔波动供频率校正计算使用。

图1 同步系统总体框图
Fig. 1 Block diagram of synchronization system
1.2 微控制器处理单元
微控制器采用飞思卡尔公司专为汽车和工业应用设计的MC9S12XS128型号芯片,其具有可靠性高,抗干扰性强等特点。片上捕获模块可以捕获秒脉冲上升沿时刻,PWM模块可以实现同步脉冲的输出,丰富的片上外设模块简化了硬件系统的设计。
1.3 OCXO校频单元
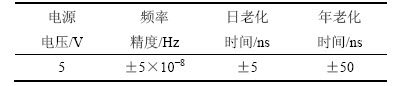
OCXO为了避免环境温度对输出频率精度的影响,利用恒温槽使其工作温度高于环境温度并且保持恒定。一般情况下OCXO使用前都需要预热5~15 min。虽然OCXO的输出频率稳定度很高,但是输出频率还是会出现非确定性噪声引起的频率偏移或是晶体老化引起的累积频率漂移,这些频率漂移都会对同步精度产生影响。OCXO采用JFVNY公司生产的OC36型,其具体指标如表1所示。
表1 OCXO主要参数
Table 1 Main parameters of OCXO
1.4 GPS接收单元
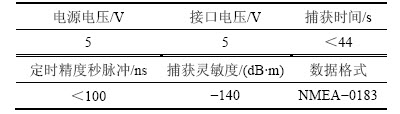
GPS接收模块采用NAVMAN公司高性能、高精度的Jupiter21模块,该模块具有较强的可靠性、稳定性和抗干扰性,可以满足电磁法仪器野外工作的需要。模块输出数据格式配置成$GPRMC,hhmmss和status,其中hhmmss为UTC时间的ACSII码,status为锁定标志位,当GPS处于锁定状态时锁定标志位为A,否则为V。GPS模块的主要参数如表2所示。
表2 GPS模块主要参数表
Table 2 Main parameters of GPS module
2 同步系统软件设计
2.1 时间间隔测量原理
时间间隔测量方法主要有电子计数法、时间间隔扩展法、延迟线内插法和游标法[11]。考虑到系统硬件平台的特点,采用电子计数法来对秒脉冲时间间隔进行测量。连续捕获秒脉冲上升沿之间的计数器的差值,结合系统时钟周期便可得到秒脉冲的时间间隔T=NT0。时间间隔测量原理如图2所示。微处理器提供了捕获模块,该模块具有16位系统时钟计数器,可以连续捕获外部触发事件,独立工作而不需要CPU的参与。
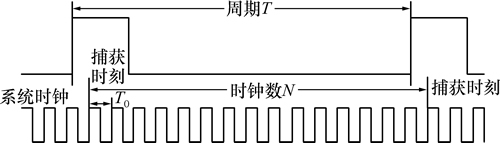
图2 时间间隔测量原理
Fig. 2 Time interval measurement principle
2.2 卡尔曼滤波预处理
GPS模块在接收信号良好的情况下,秒脉冲信号与UTC时间之间存在随机误差e。该随机误差服从正态分布[12],即
 (1)
(1)
根据正态分布的性质,e落在3σ内的概率为99.7%,在3.9σ内的概率为1。不同GPS模块秒脉冲的标准差σ各不相同。根据秒脉冲的随机误差的特点,可以采用线性最小方差估计进行滤波处理,处理后的秒脉冲精度会有显著的提高。
采用递推的线性最小方差估计,即卡尔曼滤波来对秒脉冲信号进行滤波处理。卡尔曼滤波是以最小均方误差作为估计最佳准则的递推估计算法,该方法利用前一时刻的估计值和现在时刻的测量值来计算状态变量的估计,求出现在时刻的估计值。卡尔曼滤波的信号产生模型和观测模型如下:
 (2)
(2)
 (3)
(3)
式中:a为系统参数;x(k),x(k-1)为系统在时刻k,k-1的状态值;ω(k-1)为零均值白噪声;y(k)为k时刻的测量值;c为测量参数;ν(k)为测量噪声。下面对系统的最优化输出进行估算。
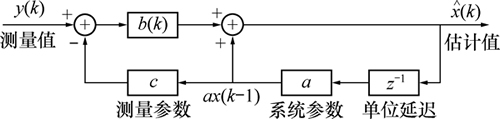
图3 卡尔曼滤波框图
Fig. 3 Diagram of Kalman filter
假设ω(k)和ν(k)都是高斯白噪声,并且不随系统状态变化而变化, 和
和 分别为ω(k)和ν(k)的方差。利用系统的信号产生模型来预测系统下一个状态。假设系统状态处于k时刻,对x(k)进行估计的公式如下:
分别为ω(k)和ν(k)的方差。利用系统的信号产生模型来预测系统下一个状态。假设系统状态处于k时刻,对x(k)进行估计的公式如下:
 (4)
(4)
式中: 和
和 分别为系统在k和k-1时刻的估计值,a(k)和b(k)为加权系数,他们之间的关系如下:
分别为系统在k和k-1时刻的估计值,a(k)和b(k)为加权系数,他们之间的关系如下:
 (5)
(5)
利用k-1时刻的估计值和k时刻的测量值y(k),可以得到系统在k时刻的最优化估计值递推公式:
 (6)
(6)
实现式(6)算法的框图如图3所示。其中,b(k)为卡尔曼增益,
 (7)
(7)
系统结果已经更新,但是对应的协方差还没有更新。设k时刻系统协方差为p(k),则p(k)为
 (8)
(8)
为了便于递推算法循环运行,需要更新系统k时刻的协方差p(k):
 (9)
(9)
GPS模块的秒脉冲信号的误差范围很小,计数器的计数值近似为一固定值,令式(9)的a取1,为0。由于是对计数值的直接估计,所以公式中测量增益c取1。对于测量噪声方差,由于没有先验知识,只能根据经验选择,通过大量实验得出当取的估计值为R=0.01时滤波效果最佳[13]。
在上述情况下,卡尔曼滤波递推算法公式化简为:
 (10)
(10)
 (11)
(11)
 (12)
(12)
2.3 OCXO频率校正
本文采用经过卡尔曼滤波预处理后的秒脉冲时间间隔计数值的波动作为OCXO的校正依据。在GPS锁定后,如果预处理后秒脉冲时间间隔计数值的波动在预设范围内,OCXO的输出频率就在系统允许的频率精度范围内,相反OCXO的输出频率发生了较大漂移,需要进行校正。
OCXO标称频率为20 MHz,频率精度为±5×10-8 Hz,故频率调整范围为-1~1 Hz。根据OCXO的压控线性可以计算出压控灵敏度为0.4 Hz/V。采用16位的DA转换器,则可以调节的输出频率最小步进量为3.05×10-6 Hz。
为了提高OCXO输出频率校正的稳定性和可靠性,本文采用了数字增量式PID控制算法完成OCXO的频率校正过程[14]。设第k次卡尔曼滤波后的时间间隔计数值与给定值的差值为e(k)[15]。第k次控制DA输出量为P(k),则2次控制DA输出量的增量为△P(k)。增量式PID控制算法为:

 (13)
(13)
 (14)
(14)
 (15)
(15)
式中:Kc为比例增益;KI为积分系数;KD为微分系数;Ts为采用周期;Ti为积分时间;Td为微分时间。
由于OCXO控制系统加热部分本身具有滞后性,
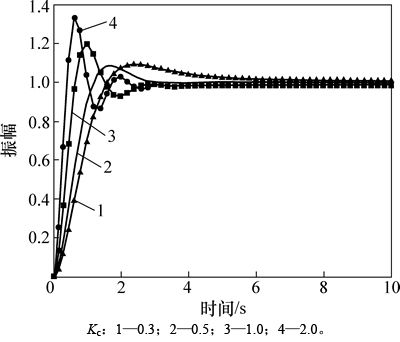
图4 Kc变化时的阶跃响应
Fig. 4 Step responses of Kc changes

图5 KI变化时的阶跃响应
Fig. 5 Step responses of KI changes

图6 数字PID控制流程图
Fig. 6 Digital PID control flow chart
每次调节都需要一定的时间等待输出频率的稳定,故可将其近似为一个二阶滞后环节[16]:
 (16)
(16)
根据OCXO输出频率控制具有很大的滞后性的特点,所设置的调节幅度不宜过大,调节周期要相对增长,即Kc和KI不宜过大,KD可以适当的增大。根据OCXO的特点,为了防止过校正,需要在PID校正过程中设置调节阀值△H,用于限定DA的调节幅度。在PID参数整定过程中,当Kc和KI分别变化时系统的阶跃响应分别如图4和图5所示。从图4和图5可知:Kc=0.5,KI=0.1时效果最好。通过实验微调,本文最后选择Kc=0.45,KI=0.1,KD=0.06。OCXO的校正过程的控制流程图如图6所示。
2.4 同步脉冲输出
微处理器的PWM模块通过将计时器与寄存器中的值进行比较,输出占空比和频率可调的脉冲信号,并可以通过软件将计数器清零,实现与秒脉冲强制同步,所以设计采用微处理器的PWM模块输出同步脉冲。由于微处理器指令是顺序执行的,并且每条指令需要几个时钟周期,所以对同步脉冲进行软件强制同步时会与秒脉冲产生32个时钟周期的固定延时。当GPS接收信号良好时,每完成一次频率校正都对PWM同步脉冲强制同步,使PWM输出的同步脉冲与秒脉冲同步。
3 实验测试结果
根据本文提出的同步系统方案设计电磁法勘探仪器同步系统硬件系统。
3.1 卡尔曼滤波处理测试
卡尔曼滤波前后对比如图7所示。为了便于观察,卡尔曼滤波输入量设为秒脉冲时间间隔计数值与给定值之差,即时间间隔波动值。从图7可以看出:卡尔曼滤波输出收敛速度较快,10 s左右输出就趋于稳定。未经过卡尔曼滤波处理的时间间隔计数值波动在±15之间,卡尔曼滤波输出稳定时波动在±1之间。

图7 卡尔曼滤波前后对比
Fig. 7 Comparison of before and after Kalman filter
3.2 同步信号测试
图8所示为秒脉冲信号与PWM模块输出的同步脉冲信号的同步测试结果。从图8可以看出:同步脉冲滞后于秒脉冲信号800 ns,即32个时钟周期。图9所示为2个同步系统的同步信号测试结果对比。从图9可以看出:2个同步系统的同步信号的同步精度小于25 ns,从而可以得出同步系统的同步脉冲与秒脉冲的上升沿的延时应为固定值。
为了验证同步系统的同步脉冲精度的稳定度,在0~120 min里对2个同步系统的同步脉冲精度进行测试,绘制如图10所示的同步精度图。从图10可以看出:在120 min内,同步精度稳定在±25 ns以内。该同步系统经过了实验室和野外实验测试,可以稳定可靠地工作。

图8 GPS秒脉冲与同步信号对比
Fig. 8 Comparison of GPS second pulse and synchronization signal
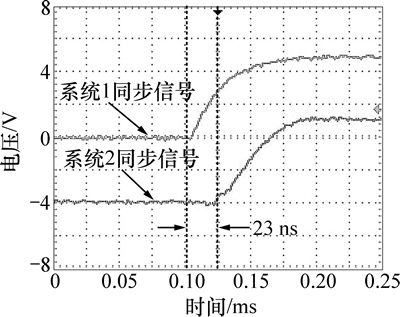
图9 2个同步系统的同步信号对比
Fig. 9 Comparison of synchronization signals of two systems
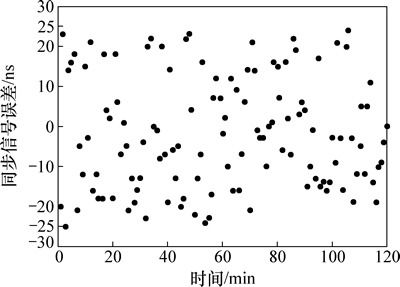
图10 2个同步信号的同步精度
Fig. 10 Synchronization precision of two signals
4 结论
1) 采用精度高、使用灵活的GPS作为同步基准,输出频率稳定度高的OCXO作为时钟源的同步系统方案可以提高电磁法勘探仪器同步精度。
2) 利用卡尔曼滤波对GPS的秒脉冲信号中的随机误差进行滤波处理,提高了秒脉冲的精度。从实验测试结果可以看出,秒脉冲时间间隔计数值波动为±15,经过卡尔曼滤波估计后的波动在±1。
3) 以GPS的秒脉冲信号为基准对OCXO输出频率在线检测并校正,可以减小OCXO因老化等原因产生频率漂移,保证其输出频率的精度,从而保证同步时钟源的精度。根据OCXO特点,在线频率校正过程采用了数字PID控制方法,保证频率校正过程的稳定和可靠。
4) 本同步系统方案采用可靠性较高的微控制器,可以提高同步系统的抗干扰能力。电路设计简单,可靠性高。经过实验测试同步系统的同步精度优于±25 ns,可以保证电磁法勘探仪器的高精度同步,从而可以保证采集数据的质量,提高仪器野外工作的效率。
参考文献:
[1] 林君. 电磁探测技术在工程与环境中的应用现状[J]. 物探与化学, 2000, 24(3): 169-176.
LIN Jun. Electromagnetic detection technology application in the engineering and environmental status quo[J]. Geophysical and Geochemical Exploration, 2000, 24(3): 169-176.
[2] NIELSEN L, JORGENSEN N O, GELTING P. Mapping of the freshwater lens in a coastal aquifer on the Keta Barrier (Ghana) by transient electromagnetic soundings[J]. Journal of Applied Geophysics, 2007, 62(1): 1-15.
[3] 李慧, 林君, 王艳, 等. 海底瞬变电磁探测技术的装置参数研究及实验[J]. 电波科学学报, 2006, 21(5): 659-665.
LI Hui, LIN Jun, WANG Yan, et al. Equipment parameters and experiment of sea floor transient electromagnetic method[J]. Chinese Journal of Radio Science, 2006, 21(5): 659-665.
[4] 宋汐瑾, 党瑞荣, 郭宝龙, 等. 一种时域电磁法剩余油探测装置的参数研究[J]. 仪器仪表学报, 2011, 32(3): 481-487.
SONG Xijin, DANG Ruirong, GOU Baolong, et al. Study on equipment parameters of time domain electromagnetic method for residual oil exploration[J]. Chinese Journal of Scientific Instrument, 2011, 32(3): 481-487.
[5] 华煌圣, 游大海, 余宏伟. 基于误差分析的变电站高精度时钟产生新方法[J]. 电力系统自动化, 2008, 32(8): 98-101.
HUA Huangsheng, YOU Dahai, YU Hongwei. New method of producing clock of high accuracy for substations based on error analysis[J]. Automation of Electric Power Systems, 2008, 32(8): 98-101
[6] 吴宁, 潘小龙, 虞皆侠. 高精度GPS同步时钟的研究与实现[J]. 电力系统自动化, 2008, 32(10): 61-65.
WU Ning, PAN Xiaolong, YU Jiexia. Research and realization of the high accuracy GPS synchronization clock[J]. Automation of Electric Power Systems, 2008, 32(10): 61-65.
[7] 于生宝, 王忠, 嵇艳鞠. GPS同步瞬变电磁探测系统设计[J]. 电子测量与仪器学报, 2005, 19(4): 39-42.
YU Shengbao, WANG Zhong, JI Yanju. Transient electromagnetic sounding system design based on the GPS synchronization[J]. Journal of Electronic Measurement and Instrument, 2005, 19(4): 39-42.
[8] 张斌, 张东来. 基于GPS的高精度时钟在线校频与授时研究[J]. 中国电机工程学报, 2012, 32(10): 160-167.
ZHANG Bin, ZHANG Donglai. GPS-based precision clock online frequency calibration and time service[J]. Proceedings of the CSEE, 2012, 32(10): 160-167.
[9] PULFORD G W. Analysis of a nonlinear least squares procedure used in global positioning systems[J]. IEEE Transactions on Signal Processing, 2010, 58(9): 4526-4534.
[10] 杜茗茗, 周雒维, 马静, 等. 基于GPS与温补晶振双同步控制的瞬变电磁测量控制器[J]. 电工技术学报, 2008, 23(12): 120-124.
DU Mingming, ZHOU Luowei, MA Jing, et al. GPS and TCXO bisynchronous transient electromagnetic measuring controller[J]. Transactions of China Electro technical Society, 2008, 23(12): 120-124.
[11] 周翟和, 汪丽群, 沈超, 等. 基于CPLD的磁致伸缩高精度时间测量系统设计[J]. 仪器仪表学报, 2014,35(1): 103-108.
ZHOU Zhaihe, WANG Liqun, SHEN Chao, et al. Design of magnetostrictive high-precision time measurement system based on CPLD[J]. Chinese Journal of Scientific Instrument, 2014, 35(1): 103-108.
[12]  J. Relative timing characteristics of GPS timing modules for time synchronization application[C]// Proceeding of 2009 International Workshop on Satellite and Space Communications Conference. Siena, Italy, 2009: 230-234.
J. Relative timing characteristics of GPS timing modules for time synchronization application[C]// Proceeding of 2009 International Workshop on Satellite and Space Communications Conference. Siena, Italy, 2009: 230-234.
[13] 姬智艳, 邓维克, 苏娟, 等. 瞬变电磁仪高精度GPS时钟同步的研究[J]. 电源技术, 2014, 38(1): 145-148.
JI Zhiyan, DENG Weike, SU Juan, et al. Research on high-accuracy GPS-time synchronization in transient electromagnetic machine[J]. Chinese Journal of Power Sources, 2014, 38(1): 145-148.
[14] 苗正戈, 刘迪, 梁成林, 等. 卡尔曼滤波器在PID控制中的仿真研究[J]. 电子设计工程, 2011, 19(18): 11-13.
MIAO Zhengge, LIU Di, LIANG Chenglin, et al. Simulation research of the application of Kalman filter in PID control[J]. Electronic Design Engineering, 2011, 19(18): 11-13.
[15] 许长辉, 高井祥, 胡洪, 等. 精密单点定位的抗差卡尔曼滤波研究[J]. 中国矿业大学学报, 2012, 41(5): 857-862.
XU Changhui, GAO Jingxiang, HU Hong, et al. Robust Kalman filtering for precise point positioning[J]. Journal of China University of Mining & Technology, 2012, 41(5): 857-862.
[16] 周芸, 李维, 路青起, 等. 基于模糊PID控制算法的恒温石英晶体振荡器[J]. 电子元器件应用, 2011, 13(2): 31-34.
ZHOU Yun, LI Wei, LU Qingqi, et al. Based on the fuzzy PID control algorithm of constant temperature quartz crystal oscillator[J]. Electronic Component & Device Applications, 2011, 13(2): 31-34.
(编辑 杨幼平)
收稿日期:2015-12-30;修回日期:2016-03-28
基金项目(Foundation item):国土资源部公益性行业科研专项基金资助项目(201311193-05) (Project(201311193-05) supported by the Special Scientific Research Fund of Public Welfare Profession of Ministry of Land and Resources of China)
通信作者:李刚,博士,讲师,从事电磁法仪器开发与应用研究;E-mail:ligang2013@jlu.edu.cn

