DOI: 10.11817/j.issn.1672-7207.2016.11.010
����ʽ��ˢͬ�����ת�ӳ�ʼλ�ù��㷽��
ë˧�������������������Ͳ�
(������ҵ��ѧ �Զ���ѧԺ������ ������710072)
ժҪ�����һ������ʽ��ˢͬ���������λ�ô��������Ҿ�ֹ�������ת�ӳ�ʼλ�õĹ��㷽�����÷���������������ʽ��ˢͬ�������������������ĵı������ԣ�ͨ���������������ʩ���ض�����ĵ�ѹ�ռ�ʸ������Ⲣ�Ƚ���Ӧ�Ķ��ӵ�����Ԥ��1��ת�ӵij�ʼλ�á�Ȼ������Ԥ����ת�ӳ�ʼλ�ö�����������ӵ����������ͣ�ͨ����˹������Ϲ���ת�ӳ�ʼλ�á�ʵ����������ת�ӳ�ʼλ�õĹ��㾫����0.5���Ƕ����ڡ�
�ؼ��ʣ�����ʽ��ˢͬ���������λ�ô���������ֹ��ת�ӳ�ʼλ�ã���˹�������
��ͼ����ţ�TM341 ���ױ�־�룺A ���±�ţ�1672-7207(2016)11-3685-07
Initial rotor position estimation of three-stage brushless synchronous motors
MAO Shuai, LIU Weiguo, MA Peng, PENG Jichang
(School of Automation, Northwestern Polytechnical University, Xi��an 710072, China)
Abstract: A method of estimating the initial rotor position of a three-stage brushless synchronous motor at standstill without any position sensors was presented. Based on the magnetic saturation characteristics of the stator core, the preliminary initial rotor position of the machine was estimated by applying specified voltage vectors to the main generator and comparing the stator current values. Then, the stator current values were modeled using the preliminary initial rotor position information and Gaussian curve fitting was performed. The results show that the standstill rotor position is within 0.5�� in electrical angle.
key words: three-stage brushless synchronous motor; sensor-less; standstill; initial rotor position; Gaussian curve fitting
����ʽ��ˢͬ�������Ϊ��õĺ��յ�����似������[1]�����ŷɻ���Դϵͳ�ķ�չ����/����˫����һ�廯��Ҫ��Խ��Խ���У�������ʽ��ˢͬ�������Ϊ��/��������о�������Ҫ����[2]��������ʽ��ˢͬ����������У���ת����1���dz���Ҫ�IJ���[3]���������У�ת�ӵij�ʼλ��ֱ��Ӱ�쵽����ʽ��ˢͬ�������ת�ء���ȷ�ij�ʼλ�û������������������½�������ת�����⣬������ʧ�ܣ���ˣ�����ʽ��ˢͬ����������ƶ�ת�ӵij�ʼλ��Ҫ��ܸߡ�λ�ô������İ�װ��������/����ϵͳ�ijɱ�������������������ܻ����ܵ���Χ������Ӱ�죬�Ӷ�Ӱ����/����ϵͳ�ɿ���[4]����ˣ�����λ�ô���������µõ�ת�ӵij�ʼλ����Ϣ�������塣��������ʽ��ˢͬ������������Ժ��շ�����Ϊ���أ�����ת�غܴ��Ҳ�������ת��ͨ��ʹ���ת������ת�ӳ�ʼλ�ù���ķ���[5]�������ã���ˣ�����ʽ��ˢͬ���������ϵͳ��Ҫ�ڵ����ֹ����µõ�ת�ӵij�ʼλ�á�������������������߽��Ƶؿ̻������ƽ������ɢ���麯����ϵ��һ�����ݴ�������[6]���ڹ���ʵ���У�ͨ�����Ի��������ɢ�����ݣ�����Щ���ݻ�ȡ����������֮��ij�ֽ��Ƶĺ�������ʽ���зdz���Ҫ������[7]����˹�����ʺ�������ѧ���������е�������̣�Ӧ�ù㷺[8]��Ŀǰ��ͬ�����ת�ӳ�ʼλ�ù��㷽���кܶࡣ����ܵ�[9-10]��Ե�����ͬ���������ڵ��ת�Ӳ�ע���Ƶ�ź������ת�ӳ�ʼλ�õķ������÷�����ͬ�������ת��������ͨ�뽻����Ƶ���ŵ�ѹ��ͨ��������������ĸ�Ӧ��ѹ����ת�ӳ�ʼλ�á�ͨ��������ټ��������Թ����ת�ӵij�ʼλ�á����÷�����Ҫ���������ƣ�������Ӳ��Ҫ���㷨��Ҫ����˲�������ƣ�������ϵͳ�ĸ����ԡ���������ʽ��ˢͬ�����������������ŵ�����ͨ����ת�������õ��ģ���������˷��������ŵ�Ҫ�����ԣ����ַ���������������ʽ��ˢͬ�����ת�ӳ�ʼλ�õĹ��㡣��Ƶ�ź�ע�뷨��һ�ֻ�������˼���ת�ӳ�ʼλ�ù��㷽�������ַ����ֿ��Է�Ϊ2�ࣺһ�������ֵ�[11-12]�����������Ƶ��ѹ�ź�ע�뷨������������[13-14]�������ת��Ƶ��ѹ�ź�ע�뷨����2����Ļ���ԭ��[15]�����ڵ����ע���ض��ĸ�Ƶ��ѹ(����)�źţ�Ȼ�������ж�Ӧ�ĵ���(��ѹ)�ź���ȷ��ת�ӵ���λ�á��������Ҳ��Ҫ����˲������㷨�ϸ��ӡ����õ���������ĵı������Թ���ת�ӳ�ʼλ������õ�һ�ַ���[16-19]�����ַ���ԭ������λʱ��̣�����Ҫ�����������һ���Ķ�λ���ȣ���һ��ʮ��ʵ�õķ���������Щ�о������϶����������ͬ��������������۷�����ʵ����֤�ġ�����ʽ��ˢͬ������ṹ�У�������������ŵ�����ͨ����ת�����������õ��ġ�������������Ź����У�����������ŵ��������ϴ����Ż����õ��ཻ������[20-22]ʱ���������ת����������Ĵ���û������ͬ�����ת�ӵ����Ŵ����ȶ������ԣ��˷���Ӧ��������ʽ��ˢͬ�����ʱ�����нϴ�Ĺ������������Ͻ����˷��Ĺ��㾫�����ŵ�ѹ�ռ�ʸ��ϸ�̶ֳȵ���߶���ߡ���ʵ��ʹ��ʱ�����ڴ��ڼ��Ԫ�������ع�����ʱ��ȣ�ʹ�ý���ͨ����ѹ�ռ�ʸ��ϸ�ֺ��ѽ�һ����߹��㾫�ȣ���ˣ����ʺ����ڶ�ת�ӳ�ʼλ��Ҫ��ϸߵij����С�����������⣬�����������һ������ʽ��ˢͬ���������λ�ô��������Ҿ�ֹ�������ת�ӳ�ʼλ�õĹ��㷽�������ȣ���������ʽ��ˢͬ�������������������ĵı������ԣ�ͨ���������������ʩ���ض�����ĵ�ѹ�ռ�ʸ������Ⲣ�Ƚ�����Ӧ�Ķ��ӵ���Ԥ��1��ת�ӳ�ʼλ�á�Ȼ������Ԥ����ת�ӳ�ʼλ�ö�����������ӵ����������ͣ������������ݵĹ�ģ���ţ���ͨ����˹������ϵõ�ת�ӳ�ʼλ�á�
1 ת�ӳ�ʼλ�ù���
1.1 ����ԭ��
�ο�����ϵʾ��ͼ��ͼ1��ʾ�� ����ϵ�̶�����������Ķ��������ϣ�d-q����ϵ��ͬ����ת����ϵ��d����ת�ӵ�N��ͬ��qr��ʾת�ӵ�ʵ��λ�ã�
����ϵ�̶�����������Ķ��������ϣ�d-q����ϵ��ͬ����ת����ϵ��d����ת�ӵ�N��ͬ��qr��ʾת�ӵ�ʵ��λ�ã� ����ϵ�ǹ�������ϵ��������ϵ�뾲ֹ����ϵA��ļн�Ϊq��
����ϵ�ǹ�������ϵ��������ϵ�뾲ֹ����ϵA��ļн�Ϊq�� ����ʩ����������������ϵĵ�ѹ�ռ�ʸ��Usͬ��
����ʩ����������������ϵĵ�ѹ�ռ�ʸ��Usͬ�� =Us��
=Us�� =0����Ϊ����ϵ�µĵ�ѹ������
=0����Ϊ����ϵ�µĵ�ѹ������
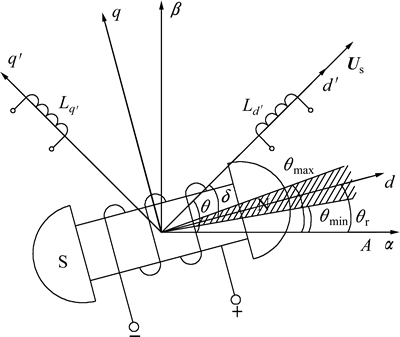
ͼ1 �ο�����ϵʾ��ͼ
Fig. 1 Diagram of reference frame
������ϵ��ת���������ڵ�d��ļн�Ϊd������ �ļ�С��ת�����Ŵ�ͨ���붨�������齻��Խ��Խ�࣬ʹ��
�ļ�С��ת�����Ŵ�ͨ���붨�������齻��Խ��Խ�࣬ʹ�� Խ��ԽС������С��0ʱ���ﵽ��Сֵ
Խ��ԽС������С��0ʱ���ﵽ��Сֵ ��������λ�õ����пɱ�ʾΪ
��������λ�õ����пɱ�ʾΪ
 (1)
(1)
ʽ�У� ��k��0����������ת�����Ŵ�ͨ����е�Ӱ�졣������ͬ���������������ͬ����ת����ϵ�µ���ѧģ�Ϳ�֪
��k��0����������ת�����Ŵ�ͨ����е�Ӱ�졣������ͬ���������������ͬ����ת����ϵ�µ���ѧģ�Ϳ�֪
 (2)
(2)
ʽ�У�RsΪ���ӵ��裻�� �ֱ�Ϊ����ϵ�µ�ֱ��ͽ����У�
�ֱ�Ϊ����ϵ�µ�ֱ��ͽ����У� ��
�� �ֱ�Ϊ����ϵ�µĵ���������
�ֱ�Ϊ����ϵ�µĵ��������� Ϊ����ĵ���ٶȣ�
Ϊ����ĵ���ٶȣ� ��ʾ
��ʾ �ĵ������ڹ�������У������ֹ����=0�����Զ��ӵ���ѹ�����ɵ�
�ĵ������ڹ�������У������ֹ����=0�����Զ��ӵ���ѹ�����ɵ�
 (3)
(3)
�������ε�
 (4)
(4)
��ˣ�����ͬ�Ƕȡ���ͬ��ֵ����ͬ����ʱ��ĵ�ѹ�ռ�ʸ�����ú���d������d���غϵ�λ�õ���id����Ӷ������жϳ�ת��N����λ��Ҳ����ת�ӵij�ʼλ�á�
�������������Ӱ�죬������ʽ��ˢͬ����������������������ͬ����ת����ϵ�µ���ѧģ�Ϳ�֪
 (5)
(5)
ʽ�У���������������������������Ļ���ΪMaf�䣻if��Ϊ�������ת�ӵ����ŵ�����
ͬ������r=0�����Զ��ӵ���ѹ�����ɵ�
 (6)
(6)
�����ε�
 (7)
(7)
��ʽ(4)��ȣ�ʽ(7)���� ����Ȼ�ڵ����У���Ȼ���������ã��������������ת�����ŵ����IJ����������ڵ�������ʱ�̣�
����Ȼ�ڵ����У���Ȼ���������ã��������������ת�����ŵ����IJ����������ڵ�������ʱ�̣� �ı仯�Dz�ȷ���ģ����ԣ�������d���غϵ����λ�ã���������һ���������ͼ1��ʾ����Ӱ���֡����ⲿ�����������õĵ�ѹ�ռ�ʸ�����õ��ĵ�����Ӧ�����ܵ�
�ı仯�Dz�ȷ���ģ����ԣ�������d���غϵ����λ�ã���������һ���������ͼ1��ʾ����Ӱ���֡����ⲿ�����������õĵ�ѹ�ռ�ʸ�����õ��ĵ�����Ӧ�����ܵ� ����ĸ��ţ��������ܳ�������Ӱ���ֵ��κ�1��λ�ã����ԣ���ֱ�ӱȽϵ������������ϴ�Ĺ�����
����ĸ��ţ��������ܳ�������Ӱ���ֵ��κ�1��λ�ã����ԣ���ֱ�ӱȽϵ������������ϴ�Ĺ�����
������������֪�������а�����ת�ӵij�ʼλ����Ϣ�����ڹ����У�ֱ�����òɼ��ĵ��������з������нϴ�Ĺ�ģ���ţ������ɱ���ʵ������֪�����ķֲ����������ҵ�1���Ϻõ�����ģ��ȥ��ϡ���ˣ�����ͨ���Ե����IJɼ�����������ͣ�ʹ�䲻������������ģ���ţ����ҿ����ó���������ģ�ͶԹ۲���������ϡ�
�����ĸ��ţ����ѹʸ��������ʱ��Ϊ��T����ʽ(4)�ɵ�
 (8)
(8)
�����180���2�����������������ģ���ţ���

 (9)
(9)
�ɶԳ��ԣ�ȡ ��
��
ͨ��Magnet������ʵ���е�����ʽ��ˢͬ�����ģ�ͽ�������Ԫ���棬�� Ϊk��2.85��6.25������6.25��(2.85����6.25��������)Ϊ��������
Ϊk��2.85��6.25������6.25��(2.85����6.25��������)Ϊ�������� ��
�� �Ĺ�ϵ����ͼ2��
�Ĺ�ϵ����ͼ2��
ͼ2�У� ��Ӧ�ĽǶȼ�ת�ӵij�ʼλ�þ��Ǧ�r��������Ӱ��ʱ�������ߵĶ��������������ͼ3��ʾ����Ӱ�����ڴ������ڣ����ܳ�������Ӱ���ֵ��κ�1��λ�ã�������Ӧ�ĽǶȿ�����
��Ӧ�ĽǶȼ�ת�ӵij�ʼλ�þ��Ǧ�r��������Ӱ��ʱ�������ߵĶ��������������ͼ3��ʾ����Ӱ�����ڴ������ڣ����ܳ�������Ӱ���ֵ��κ�1��λ�ã�������Ӧ�ĽǶȿ����� ����������ת�ӳ�ʼλ�æ�r֮����ڽϴ����
����������ת�ӳ�ʼλ�æ�r֮����ڽϴ����
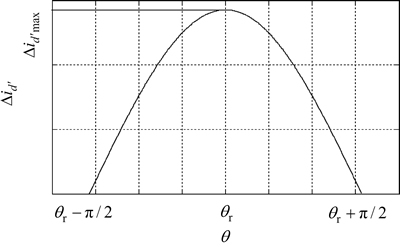
ͼ2  ��q�仯����(������
��q�仯����(������ )
)
Fig. 2 Relationship between and �� regardless of
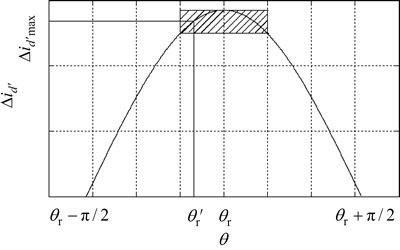
ͼ3 ��q�仯����(����)
Fig. 3 Relationship between and �� regard of
���ͼ2����֪ͼ3�ڴַ�Χ�ڣ��ķֲ��������˹�������ƣ���ˣ�ѡ���˹������Ϊ ������ģ�͡�������ɢ����������Ͻ���Ƕ���ɢ����������õıƽ�����ˣ������ںܴ�̶��ϼ�С��ת�ӳ�ʼλ�ù����Ӱ�죬ͨ����ϸ�˹�������ߵĶ���λ�þͿ���ȷ����r���Ӷ��õ�����ʽ��ˢͬ������������ת�ӳ�ʼλ�á�
������ģ�͡�������ɢ����������Ͻ���Ƕ���ɢ����������õıƽ�����ˣ������ںܴ�̶��ϼ�С��ת�ӳ�ʼλ�ù����Ӱ�죬ͨ����ϸ�˹�������ߵĶ���λ�þͿ���ȷ����r���Ӷ��õ�����ʽ��ˢͬ������������ת�ӳ�ʼλ�á�
1.2 ���㷽��
��������ԭ������������Ĺ��㷽����Ϊ2����
1) ��1������ת�ӳ�ʼλ�ý���Ԥ����
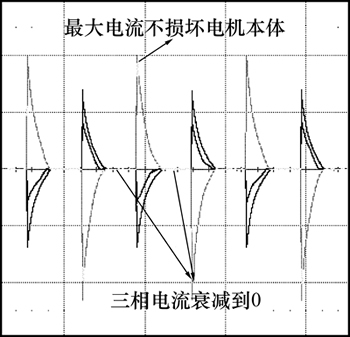
����ͨ�����Ż����������ת�����ţ�Ȼ��ȷ��ʩ����������������ϵĵ�ѹ�ռ�ʸ���ķ�ֵ������ʱ���Լ�����2����ѹ�ռ�ʸ���������ʸ����ʱ�䣬ȷ�����������������㲻������壬����ÿ��ʩ�ӵ�ѹ�ռ�ʸ��ǰ�����������������˥����0 A����ͼ4��ʾ��Ȼ��ѡ����ʩ�ӵĵ�ѹ�ռ�ʸ������n����ͼ5��ʾ(��n=24Ϊ����������ֵ����ͨ��ʵ���ã���n����ijһֵʱ�����㾫�Ƚ����������Եı仯)��
ͼ4 ��ѹ�ռ�ʸ��ѡ��Ҫ��
Fig. 4 Requirements for voltage space vectors
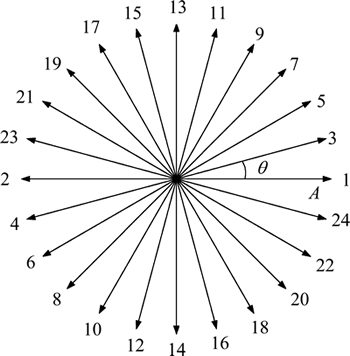
ͼ5 ��ѹ�ռ�ʸ������˳��
Fig. 5 Sequence of voltage space vectors
��ÿ�����õĵ�ѹ�ռ�ʸ��������ֹ����ϵA��ļн�Ϊ�ȡ�Ϊ��ֹ���ת������ͼ5��ʾ��˳��1~24�������������ʩ�ӵ�ѹ�ռ�ʸ����ͬʱͨ�������������ɼ��������������
ȡÿ�ε�ѹ�ռ�ʸ���������ʱ��Ӧ�Ķ������������ӦֵiA��iB��iC��Ȼ��ͨ������任�õ�����ϵ�µĵ���id�䣬����任ʽΪ
 (10)
(10)
ͨ���Ƚϵó���������� ��������������������������ֵ
��������������������������ֵ �����㷽�����¡�
�����㷽�����¡�
������������ŵ������ν��зŴ�ɵ�ͼ6����ȡ���б�ʵľ���ֵ���õ� ����Ϊ
����Ϊ
 (11)
(11)
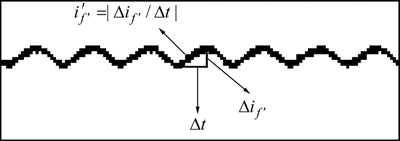
ͼ6  ����ʾ��ͼ
����ʾ��ͼ
Fig. 6 Algorithm diagram of
������д��ڵ���-�������ҳ���Ӧ�Ħȣ��Ƚϵó����е����ֵ��max����Сֵ��min��
����max-��min��180��ʱ��ת�ӳ�ʼλ�õ�Ԥ��ֵ��r_temp����ʽ��ã�
 (12)
(12)
����max-��min��180����360��-��max�ݦ�minʱ��
 (13)
(13)
����max-��min��180����360��-��max����minʱ��
 (14)
(14)
2) ��2�����ø�˹��������㷨[23]�õ�ת�ӵij�ʼλ�á�
�����temp=��r_temp-90�㡣����r_temp-90�㣼0�㣬���temp= ��r_temp-90��+360�㡣���k=360k/n(���У�nΪ��ѹ�ռ�ʸ���ĸ�����kΪ����)����Ӧ�������Ϊ ������k��360��ʱ��
������k��360��ʱ�� ������k��0��ʱ��
������k��0��ʱ��
 �����ʹ|��k-��temp|��С��m����Ӧ�������Ϊ
�����ʹ|��k-��temp|��С��m����Ӧ�������Ϊ ����
����
 ��
�� ������
������
 ��
��
����ɢ��(��m�� )��(��m+1��
)��(��m+1�� )������(��m+n/2-1��
)������(��m+n/2-1�� )���и�˹������ϣ�����㷨���¡�
)���и�˹������ϣ�����㷨���¡�
ȡ��˹����Ϊ
 (15)
(15)
���У�u��A�� ��Ϊ��˹�����еĴ���ϵ������ʽ(15)����ȡ��Ȼ��������������
��Ϊ��˹�����еĴ���ϵ������ʽ(15)����ȡ��Ȼ��������������
 (16)
(16)
ʽ�У�
 (17)
(17)
�������
 (18)
(18)
�������
 (19)
(19)
��������ϵķ������� Ϊ
Ϊ
 (20)
(20)
��ʽ(20)��
 (21)
(21)
ʽ�У�NΪ�������ݵĸ�������ʽ(21)���a��b��c����˹�����Ĵ���ϵ������ʽ(22)���õ�
 (22)
(22)
������ϵ���̣���Ϊ��˹������ߵ㴦�ĺ����ꡣ�ɹ���ԭ�����ֵķ�����֪���̶�Ӧ��ת��N����λ�ã�������ת�ӳ�ʼλ��Ϊ��r=�̣����̡�360�㣬���r=��-360�㣻���̣�0�㣬���r=��+360�㡣
2 ʵ���������
2.1 ʵ������
��ѹ�ռ�ʸ���ķ�ֵUm=0.3(���ƶ�)������ʱ��200 ��s������2����ѹ�ռ�ʸ���������ʸ����ʱ��Ϊ6 ms��ѡ����ʩ�ӵĵ�ѹ�ռ�ʸ������n=72(ͨ��ʵ���ã���n����72ʱ�����㾫��û�����Եı仯����ѡ��n=72)��
���ĵ�ʵ��ƽ̨������1) ����ʽ��ˢͬ�������2) MAGTROL��˾��2PT115-T����̨��3) ��TMS320F2812Ϊ����оƬ�Ŀ�������4) ֱ����Դ�������ʾ�����ȸ����豸��
2.2 ʵ����
������ӦֵiA��iB��iC��ͼ7��ʾ����iA��iB��iC�任������ϵ���õ���������ͼ8��ʾ��=255 A����ͼ8���Կ�������ʱ��ɢ�����ķֲ����������ԣ����ʺϽ���������ϡ������=6 A���ҳ����д��ڵ��� =249 A����Ӧ�ĽǶȣ���������е����ֵ��max=95������Сֵ��min=75�㡣
=249 A����Ӧ�ĽǶȣ���������е����ֵ��max=95������Сֵ��min=75�㡣
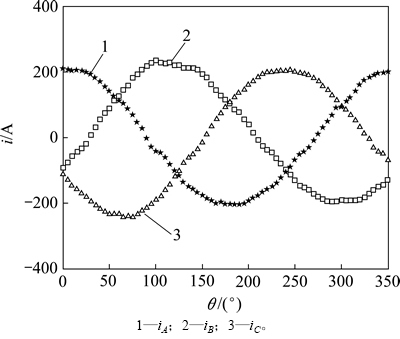
ͼ7 ��ͬ��ѹ�ռ�ʸ���ĵ�����Ӧ����
Fig. 7 Curves of current response of different voltage space vectors
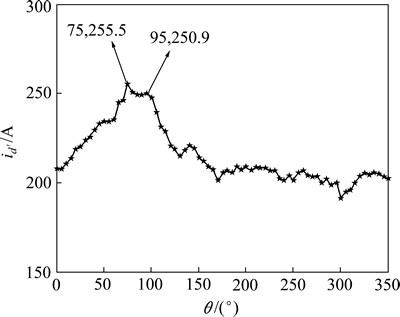
ͼ8 d�����������
Fig. 8 Curve of d�� axis current
��������ת�ӳ�ʼλ��ֵ����r_temp=(��max+��min)/2= 85�㡣�����temp=��r_temp-90��+360��=355�㡣���ʹ |��k-��temp|��С��m=71����Ӧ�� �����Ϊ
�����Ϊ ����
���� =
= ��
�� =
=  ������
������ =
= ��
��
��(��71��)��(��72��)������(��106��)�����ͼ����ͼ9��ʾ��
������������ϣ�������״�����ڸ�˹�ֲ��������۷�������������ˣ�ѡ�ø�˹������������ϡ��ɱ�������ķ�������ʵ��õ�����������ɵæ�=444.8����=35.1��A= 47.07����Ͻ����ͼ9��ʾ����Ϊ�̡�360�㣬�ʦ�r=��-360�㣽84.8�㡣�������ת�ӳ�ʼλ��84.8����ʵ�ʵ��ת��λ��84.38��(��λ�ô��������)���0.42�㣬��ȫ��������ʽ��ˢͬ��������Ƶ�Ҫ��
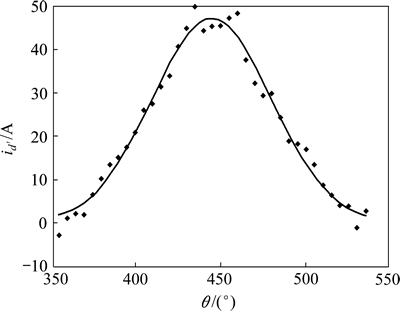
ͼ9 ��˹�������
Fig. 9 Curve of Gaussian fitting
3 ����
1) �����һ������ʽ��ˢͬ�����ת�ӳ�ʼλ�õĹ��㷽�������������ת�ӱ��־�ֹ���Ҳ�ʹ��λ�ô���������������2�����У�������������ʽ��ˢͬ�������������������ĵı���������Ԥ��1��ת�ӵij�ʼλ�ã�Ȼ��ͨ����˹���߶Ծ������͵���ɢ����������Ϲ����ת�ӳ�ʼλ�á�
2) ת�ӳ�ʼλ�õĹ��㾫����0.5���Ƕ����ڣ���ȫ��������ʽ��ˢͬ��������Ƶ�Ҫ�������Ե�����������У�Ҳ����������������������ͬ������������ͬ������С�
�ο����ף�
[1] LI Yanan, ZHOU Bo, WEI Jiadan, et al. Modeling of starter/generator based on three-stage brushless synchronous machines[C]//2010 International Conference on Electrical and Control Engineering. Wuhan, China, 2010: 5345-5348.
[2] ������, ������, ������, ��. ������/����ϵͳ�ķ�չ�������о���״[J]. ���տ�ѧ����, 2010(5): 28-32.
DAI Weili, WANG Huizhen, YAN Yangguang, et al. Development trend and current situation of starter-generator for aircraft engine[J]. Aeronautical Science and Technology, 2010(5): 28-32.
[3] ������, ������, �Ż�, ��. һ�ֱ�������ˢͬ��������ת�ص����ȿ��Ʒ���[J]. �ص��, 2013, 41(1): 4-6.
JIAO Ningfei, LIU Weiguo, ZHANG Hua, et al. An MTPA control method for brushless synchronous machine with variational excitation[J]. Small & Special Electrical Machines, 2013, 41(1): 4-6.
[4] YAN Yang, GAO Hongwei. Initial rotor position estimation for low saliency interior permanent-magnet synchronous motor drives[C]//Applied Power Electronics Conference and Exposition (APEC). Texas, USA, 2011: 1022-1027.
[5] �쟺��, ������. ������������ͬ�������ʼ��λ������[J]. �й��������ѧ��, 2008, 28(9): 61-65.
ZHU Huangqiu, CHENG Qiuliang. Initial orientation and starting strategy on PMSM without starting windings[J]. Proceedings of the CSEE, 2008, 28(9): 61-65.
[6] ����ɽ, ������, ������. ʵ�����ݴ�����������Ϸ���̽��[J]. �ɶ�������ѧѧ��(��Ȼ��ѧ��), 2004, 31(1): 91-95.
QIAO Lishan, WANG Yulan, ZENG Jinguang. Research of curve fitting methods in the experiment data processing[J]. Journal of Chengdu University of Technology (Science & Technology Edition), 2004, 31(1): 91-95.
[7] �Ƴ�, �ݻԻ�. ����Matlab�ĸ�˹����������[J]. ����������ֹ���, 2013, 41(8): 1262-1263.
TANG Chong, HUI Huihui. Gaussian curve fitting solution based on Matlab[J]. Computer & Digital Engineering, 2013, 41(8): 1262-1263.
[8] GUO Hongwei. A simple algorithm for fitting a Gaussian function[J]. Signal Processing Magazine IEEE, 2011, 28(5): 134-137.
[9] �����, ����, ��ǿ, ��. ��Ƶע���ѹԤ��ͬ�����ת��λ�ü�ⷽ��[J]. �й��������ѧ��, 2014, 34(9): 1376-1383.
JIN Guangzhe, XU Dianguo, GAO Qiang, et al. A synchronous motor rotor position detection method based on high-frequency injection voltage prediction[J]. Proceedings of the CSEE, 2014, 34(9): 1376-1383.
[10] ������, ��־ѫ, ������, ��. ת��ע���Ƶ��ͬ���������������[J]. ��������ѧ��, 2010, 14(10): 61-67.
DENG Xianming, MA Zhixun, LI Xinyu, et al. Sensor-less control of synchronous motor based on high-frequency signal injection into the rotor[J]. Electric Machines and Control, 2010, 14(10): 61-67.
[11] ������, ���ٷ�, ���, ��. ���ڸ�Ƶ�ź�ע��� IPMSM ��λ�ô��������Ʋ���[J]. �繤����ѧ��, 2012, 27(11): 62-68.
WANG Gaolin, YANG Rongfeng, LI Gang, et al. Position sensor-less control strategy of IPMSM based on high frequency signal injection[J]. Transactions of China Electrotechnical Society, 2012, 27(11): 62-68.
[12] ��ӱ, �ܲ�, ����, ��. ���������Ƶ����ע��SPMSM������λ�ô���������[J]. �繤����ѧ��, 2012, 27(7): 139-145.
LIU Ying, ZHOU Bo, FENG Ying, et al. Sensor-less control of SPMSM based on high frequency current signal injection in the direct axis at low and zero speed[J]. Transactions of China Electrotechnical Society, 2012, 27(7): 139-145.
[13] ����, ���, ŷ��, ��. ������ת��Ƶ�źŷ���IPMSM��λ�ô���������[J]. �繤����ѧ��, 2013, 28(7): 26-31.
YU Yanjun, CHAI Feng, OU Jing, et al. Position sensor-less control of IPMSM based on rotating high frequency signal method[J]. Transactions of China Electrotechnical Society, 2013, 28(7): 26-31.
[14] LORENZ R D.Practical issues and research opportunities when implementing zero speed sensor-less control[C]//Proceedings of the Fifth International Conference on Electrical Machines and Systems. Shenyang, China, 2001: 1-10.
[15] �ط�, ���濵, ����, ��. ���ָ�Ƶ�ź�ע�뷨�������������о�[J]. �й��������ѧ��, 2005, 25(5): 116-121.
QIN Feng, HE Yikang, LIU Yi, et al. Comparative investigation of sensor-less control with two high-frequency signal injection schemes[J]. Proceedings of the CSEE, 2005, 25(5): 116-121.
[16] NAKASHIMA S, INAGAKI Y, MIKI I. Sensor-less initial rotor position estimation of surface permanent-magnet synchronous motor[J]. IEEE Transactions on Industry Applications, 2000, 36(6): 1598-1603.
[17] Τ��, ������. ����ʽ����ͬ�������ʼת��λ�ù��Ƽ���[J]. �й��������ѧ��, 2007, 26(22): 104-109.
WEI Kun, JIN Xinhai. Initial rotor position estimate technique on surface mounted permanent magnet synchronous motor[J]. Proceedings of the CSEE, 2007, 26(22): 104-109.
[18] BOUSSAK M. Implementation and experimental investigation of sensor-less speed control with initial rotor position estimation for interior permanent magnet synchronous motor drive[J]. IEEE Transactions on Power Electronics, 2005, 20(6): 1413-1422.
[19] TURSINI M, PETRELLA R, PARASILITI F. Initial rotor position estimation method for PM motors[J]. IEEE Transactions on Industry Applications, 2003, 39(6): 1630-1640.
[20] �±���, ������, �¹㻪, ��. �ɻ���/����˫����ϵͳ�綯״̬���ཻ�����ŵ��о�[J]. �繤������־, 2001(1): 7-8.
CHEN Baolin, YAN Yangguang, CHEN Guanghua, et al. Study on single-phase AC excitation of electromotion state about start/generate electricity two function system of aeroplane[J]. Electric Engineering, 2001(1): 7-8.
[21] ���㿵. ���ʽ��ˢ����ͬ��������������о�[D]. �Ͼ�: �Ͼ����պ����ѧ�Զ���ѧԺ, 2002: 21-41.
GU Yikang. Research on the new start scheme for brushless electro-magnetic synchronous AC motor[D]. Nanjing: Nanjing University of Aeronautics and Astronautics. School of Automation, 2002: 21-41.
[22] ����, ������, �����, ��. һ������ʽ������ˢͬ��������Ʋ���[J]. ��������ѧ��, 2012, 16(11): 29-32.
MA Peng, LIU Weiguo, LUO Guangzhao, et al. Starting control strategy for three-stage aviation brushless synchronous motor[J]. Electric Machines and Control, 2012, 16(11): 29-32.
[23] CARUANA R A, SEARLE R B, HELLER T, et al. Fast algorithm for the resolution of spectra[J]. Analytical Chemistry, 1986, 58(6): 1162-1167.
(�༭ �²ӻ�)
�ո����ڣ�2015-10-11�������ڣ�2015-12-06
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51277152) (Project(51277152) supported by the National Natural Science Foundation of China)
ͨ�����ߣ�ë˧����ʿ�о���������ͬ������ŷ����Ƽ����о���E-mail: maoshuai1989@126.com

