DOI: 10.11817/j.ysxb.1004.0609.2021-36534
���ڿ������˲�������ʽ���������ڵ���ɼ��㷨
������1��������1���� ��1��������1���º��2��������1
(1. ���ϴ�ѧ ���������ѧԺ����ɳ410083��
2. �������ö����ܿƼ�����˾����ɳ410006)
ժ Ҫ�����Ŀǰ�������ҵ���ڲ����ڵ���IJɼ�����ȷ������ʱ�ϸߵ����⣬�������һ�ֻ��ڿ������˲�������ʽ�����ڵ���ɼ��㷨�����㷨�Կ������˲�Ϊ��������Ԥ��ֵ�����ֵ�ľ�����������ǵĸ�˹���������ʣ�ʹ���ܹ��ڵ���ƽ�ȵ�״̬�����Ž�ǿ�ĸ������ܣ��ٽ��һ�����˲���ǿ�˲����ԺͿ������˲���ǿ�������ƣ��������õ��˲����䣬ȷ������㷨�ڲ����ڵ��貨���ϴ��������ܹ��˳���������Ӱ�죬���ڵ����ȶ����ܶԲ����ڵ�����п����������١������������һ�����˲���ȣ��Ľ���Ŀ������˲��ڵ���ƽ�ȵ�״̬���������������50%���ڵ��۷�������Ͱڶ����֮�������ʱ�����90%��
�ؼ��ʣ�����⣻����ɼ����������˲��㷨��һ�����˲�
���±�ţ�1004-0609(2021)-01-0125-07���� ��ͼ����ţ�TF821���� ���ױ�־�룺A
���ĸ�ʽ��������, ������, �� ��, ��. ���ڿ������˲�������ʽ���������ڵ���ɼ��㷨[J]. �й���ɫ����ѧ��, 2021, 31(1): 125-131. DOI: 10.11817/j.ysxb.1004.0609.2021-36534
DENG Lian-wen, LIU Guo-tao, ZHAO Yan, et al. Kalman filter-based segmented aluminum electrolytic cell slot-like resistance acquisition algorithm[J]. The Chinese Journal of Nonferrous Metals, 2021, 31(1): 125-131. DOI: 10.11817/j.ysxb.1004.0609.2021-36534
�����ĵ����Ϊ������Ҫ�����������ܿ���ϵͳ���漰�������������IJɼ��ͷ�������Ҫ�������Ե���ʵʩ���Ƶ���Ҫ�����Ǽ�����ơ���ƽ����ƺ����Ͽ��ƣ�����ʵ��������Ƶ���Ҫ�����ź��������۵IJ����ڵ���[1]����ˣ����۵IJ����ڵ���ɼ��㷨���Ż�������Ҫ��ʵ���塣
Ŀǰ���ۿػ��Ե��۵Ŀ�����Ҫ�����ڴ��������ɼ���·�ɼ������ݣ�ͨ���Բɼ������ݽ��з������о����۵�״̬�������Ľ��Ʊ����ա���幵�[2]��320 KA���۵IJ۵�ѹ������Ƶ����������������ֻ��һ�������壬�����ϲ������������塣��µ�[3]���������ڵ����źŵ�����ǿ����Ϊ����ЧӦ����Ԥ���ĸ����оݡ����������˲����ܵ��˲�����������ò����ڵ����ж�����ƽ��(Al2O3Ũ��)״̬��Ԥ������ЧӦ�Ŀɿ��ԡ��ֽι�ҵ������Ҫ���õ���һ�����˲��㷨�������ڵ���ɼ��ĸ����Բ�������˲��㷨���и�����ǿ���ٶȿ�����ƣ������Ŀ������˲��㷨ֻ����������ϵͳ�У�����ʵ��Ӧ�ù����У�������ȷ��ϵͳģ�ͣ��������˲���ɢ[4-7]�����Ϊ������ϵͳ������Ҫʹ����չ�������˲�[8-10]���ǻ���UT�任�Ŀ������˲�[11-12]�����������˲��㷨Ҳ��Ҫ��ȷ��ϵͳ����ģ�ͺ�����ͳ�����ԣ��ڲ����ڵ���ɼ��в������á����ĶԴ�ͳ�������˲����������Ż�����������ݵļ��ʱ��̣���Ԥ��ֵ��Ϊϵͳ�۲�ֵ���ÿ��������������˲����������÷�ֵ�仯��ֵ���ڵ��۷�����ں�ЧӦʱʹ��һ���˲����������������Ľ�����˲��㷨�ڵ���ƽ��״̬�¾߱���ǿ�ĸ����ԣ������ܹ��˳�������Ͱڶ��ĸ��ţ����Ը��õ���ȡ�����ڵ���ͱ���Al2O3Ũ�ȱ仯����Ϣ��
1 ����ʽ����������ɼ��㷨
1.1 �����ڵ������������۵�ѹ�Ĺ�ϵ
�ڹ����ϣ��۵�ѹ�ɽ�����Ϊ��������ѹ����������ѹ������ĸ�ߵ�ѹ���Լ������ѹ����ɣ����м����ѹ���ɷ�Ϊ���۷ֽ��ѹ�������绯ѧ����ѹ������Ũ�����ѹ������Ũ�����ѹ�Լ�����ʵ�ѹ�������ʵ�ʵĵ�����������У�ϵ�е����ﲻ��ʼ�պ㶨��״̬�����ǻ���Щ��������������Ӱ�쵽�����ѹ���ı仯��Ҳ��ʹ�۵�ѹ�е�ŷķ��ѹ�����仯����������ɵ��裬��Щ����ŷķ��ѹ�ĵ����Dz���ģ����Բ۵�ѹ�е�������ѹ����������ѹ���Ͳ�ĸ�ߵ�ѹ������Ӱ��ͨ���������������Ũ�ȡ����⣬Ϊ��ʹ�ò����ڵ������������Ũ�ȣ���Ҫ�ڼ�������ڵ���ʱ������ϵ�е���Ӱ��ġ������������оͰ������۷ֽ��ѹ�������绯ѧ����ѹ������Ũ�����ѹ�Լ�����Ũ�����ѹ����Щ��ѹ��ͨ���������ɺ��¶ȵȲ���ֱ�Ӽ��㣬��˹��������ʹ�ò����ڵ������������Ũ�ȡ����ڼ�������IJ����ڵ���ֵ��С��Ϊֱ��������ɽ������ڵ������Ա任Ϊ���������۵�ѹ����ʹ�����������ڵ�����ͬ���� ��[13]������
 (1)
(1)
ʽ�У�Vo(n)Ϊ��nʱ�̵��������۵�ѹ(ԭʼֵ)��IbΪ��������B Ϊ���۷��綯�ƣ������۵�ѹ�в���ϵ�е����ı仯���ı�IJ��֡�
1.2 �����ڵ����˲��Ļ���ԭ��
ͨ����˵�������ۡ������ڵ����˲�����ָ�ԡ��������۵�ѹ�����е�ͨ�����˲���ȥ������Ƶ�ʽϸߵijɷ֣��Ա�����Լ����Al2O3Ũ����������Զ���Ϊ��ʱ���״̬�������жϺͿ��Ʋ������ţ�Ϊ�ﵽ��һĿ�ģ�һ����þ��й����˲����ܵ�һ�ݹ�ʽ��ͨ�����˲�������ʱ�����ʽΪ��
 (2)
(2)
ʽ�У� Ϊ�˲��������(���˲�ֵ)��
Ϊ�˲��������(���˲�ֵ)�� Ϊ�˲���������(������ֵ)��k����������
Ϊ�˲���������(������ֵ)��k���������� Ϊ�˲�ϵ��(0����1)�������������۵�ѹ�IJ���Ƶ����0.002~0.04 Hz֮�䣬����Һ�IJ���Ƶ�ʴ���0.03 Hz����[14]������Ϊ�˻���㹻խ���˲����������������ҵ���ձ����=1/32���˲�ϵ�����������˼�ʹ����û������������¼�����ĵ���ֵҲ���кܴ���ͺ��ԣ���������������˲���Ӱ�졣
Ϊ�˲�ϵ��(0����1)�������������۵�ѹ�IJ���Ƶ����0.002~0.04 Hz֮�䣬����Һ�IJ���Ƶ�ʴ���0.03 Hz����[14]������Ϊ�˻���㹻խ���˲����������������ҵ���ձ����=1/32���˲�ϵ�����������˼�ʹ����û������������¼�����ĵ���ֵҲ���кܴ���ͺ��ԣ���������������˲���Ӱ�졣
1.3 �������˲��Ļ�������
������ϵͳ����ɢ״̬���̺۲ⷽ��Ϊ��
 (3)
(3)
 (4)
(4)
ʽ�У� ��kʱ�̵�ϵͳ״̬��
��kʱ�̵�ϵͳ״̬�� ��kʱ�̶�ϵͳ�Ŀ�������A��B��ϵͳ���������ڶ�ģ��ϵͳ������Ϊ����
��kʱ�̶�ϵͳ�Ŀ�������A��B��ϵͳ���������ڶ�ģ��ϵͳ������Ϊ���� ��kʱ�̵IJ���ֵ��
��kʱ�̵IJ���ֵ�� �Dz���ϵͳ�IJ��������ڶ����ϵͳ��Ϊ����
�Dz���ϵͳ�IJ��������ڶ����ϵͳ��Ϊ���� ��
�� �ֱ��ʾ���������Ͳ���������
�ֱ��ʾ���������Ͳ���������
��������ϵͳ�Ĺ��������Ͳ���������Ϊ��˹�����������ǵ�Э�������ֱ���Q��R��ʾ����ô�������˲�����������ϵͳ�����ŵ���Ϣ���������ɵó��������˲��ĵ��Ʒ���Ϊ��
 (5)
(5)
 (6)
(6)
 (7)
(7)
 (8)
(8)
 (9)
(9)
ʽ�У� ��
�� ʱ�̵Ļ����϶�kʱ�̵�״̬���ƣ�
ʱ�̵Ļ����϶�kʱ�̵�״̬���ƣ� ��ʾ��ʱ�̵�kʱ�̵ĵ���Ԥ��Э������
��ʾ��ʱ�̵�kʱ�̵ĵ���Ԥ��Э������ Ϊ���������棻
Ϊ���������棻 Ϊkʱ�̵�ϵͳ״̬���Ź��ƣ�
Ϊkʱ�̵�ϵͳ״̬���Ź��ƣ� Ϊ���º�Ĺ���Э�������
Ϊ���º�Ĺ���Э�������
1.4 ����ʽ�������˲��㷨ʵ��
�������˲�����һ�ָ�Ч�ĵ����˲�����ʹ�ÿ������˲�����Ҫ����״̬���̺۲ⷽ�̣��������������ڵ��貢û����ȷ��״̬ת�Ƽ��㷽�̣���ҵ������Ҳ��ֱ�Ӳ�������ֵ������ͨ���˲��õ��ĵ�����Ϣ���Է�ӳ���������AL2O3Ũ��(��������)��������ʱ���״̬�������������������������£�Al2O3���ܽ�ʱ�䳣��Ϊ10 min���ܽ��ͺ�ʱ��Ϊ2 min���ң�������Al2O3Ũ�ȱ�����1.5%~2.5%֮�䣬Al2O3Ũ�Ⱥ���������ı仯����Ϊ�����������ݵIJ���Ƶ��Ϊ1 Hz��������ʹ�ÿ������˲�ʱ�����ж�Ϊ���εĵ���Ԥ��ֵΪ��һ�ε��˲�����ֵ�����ڲ��õ��˲��������ս������ڲ�����ѹ������������ֵ�����Կ��Խ�Ԥ��ֵ�ij�ֵ��Ϊ����ֵ������Ϊ�˼ӿ��˲��㷨�����������Ľ���ֵ��Ϊ4000(Ϊ�����߱��ֵø���ֱ�ۣ�����ġ��������۵�ѹ�������1000)��
Ϊ�˽��п������˲�Ԥ��ֵ�ļ��㣬������Ҫ���㿨�������棬����㷽��Ϊ��
 (10)
(10)
ʽ�У�Ϊ��k�εĿ��������棻 Ϊ����Ԥ��ֵ��ƫ�
Ϊ����Ԥ��ֵ��ƫ� Ϊǰ10�βɼ�ֵ�ľ�����������ڱ������������еĸ�˹�������Ĺ��ʣ�����㹫ʽΪ��
Ϊǰ10�βɼ�ֵ�ľ�����������ڱ������������еĸ�˹�������Ĺ��ʣ�����㹫ʽΪ��
 (11)
(11)
ʽ�У�AΪǰʮ�βɼ�ֵ��ƽ��ֵ��
���ż����k�εĿ�����Ԥ��ֵ���乫ʽ���£�
 (12)
(12)
ʽ�У� Ϊ��k�εĿ�����Ԥ��ֵ��
Ϊ��k�εĿ�����Ԥ��ֵ�� Ϊ���ο�����Ԥ��ֵ��
Ϊ���ο�����Ԥ��ֵ�� Ϊ�ɼ�ϵͳ����������ı��������ڵ��裬���ڿ������˲�ϵͳ���ս�����������ʵֵ�����������������ij�ֵ��0��
Ϊ�ɼ�ϵͳ����������ı��������ڵ��裬���ڿ������˲�ϵͳ���ս�����������ʵֵ�����������������ij�ֵ��0��
Ϊ�����ÿ������˲��㷨����ѭ�����㣬Ԥ����µ�ֵ������Ҫ�����k�ο�����Ԥ��ֵ��ƫ��乫ʽ���£�
 (13)
(13)
 (14)
(14)
ʽ�У� Ϊ��k�ο������˲�Ԥ���Э�����
Ϊ��k�ο������˲�Ԥ���Э����� Ϊ��k�ο������˲�Ԥ���ƫ��ֵ��
Ϊ��k�ο������˲�Ԥ���ƫ��ֵ�� Ϊǰ10�ο�����Ԥ��ֵ�ľ�����������ڱ���ϵͳ��˹�������Ĺ��ʡ�
Ϊǰ10�ο�����Ԥ��ֵ�ľ�����������ڱ���ϵͳ��˹�������Ĺ��ʡ�
1.5 �������˲��㷨�������۷���
����ʹ����һ�ε��˲�����ֵ���汾�ο������˲���״ֵ̬�������˲��������Ԥ�ⲻȷ������������Ԥ�ⲻȷ��������ʱ�����ʽΪ��
 (15)
(15)
ʽ�У� Ϊ��k�ε�Ԥ����
Ϊ��k�ε�Ԥ���� Ϊ��k���˲��������Ԥ�ⲻȷ��ɵ���
Ϊ��k���˲��������Ԥ�ⲻȷ��ɵ���
ͨ��ʽ(15)��֪������Ԥ�������ʱ��������߲��������£��������˲�������ʱ���ڼ�С����ô�ͻᵼ�����Ļ��ۣ�����ϵͳ��ƽ��״̬������Ե�������(�ݼ�)����ô���ᵼ�����Ļ��ۡ�
����ʹ���˲�ֵ���ɼ�ֵ�ľ�����ֱ������Ԥ�ⷽ����������̵ĸ�˹���������ʣ���ϵͳ��ƽ��״̬������Ե�������(�ݼ�)ʱ���˲�����������б�ʵı仯���仯���ͻ�����ϴ�������ۡ����Ǽ�����ġ��������۵�ѹ������ͻ�䣬����״ֵ̬Ϊ��һ���˲��ĵ���ֵ����ʱҲ������ϴ��Ԥ�������������������У���ѹ��ͻ�������ڵ����̵IJ��ȶ�����(�����ݡ���Һ����)��ɵģ��������������ԭ��ͬ������ij���ʱ�估����ķ��Ȼ�������𣬶����տ�������Ҫ�˳��ⲿ�ָ��ţ��Ӷ�ͨ������仯�жϵ����ڵ�������Ũ�ȱ仯�����նԵ��۽��п��ƣ����Կ����ڲɼ����ĵ���ͻ��ʱ����ǿ�˲�������д��������ڵ����ȶ�ʱ����ʹ�ÿ������˲������Ҷ�����������¼��㣬���ܷ�ֹ���Ļ��ۡ�
1.6 �㷨���������ȷ��
���������յ����⣬�����ڵ��貢����ƽ�����ȶ��ģ�������Ũ�ȱ仯���µĵ���仯�ڶ�ʱ���ڿɿ��������Եģ������ڵ������л�ʱ�������������������ų���¯�׳��������������Щ����ᵼ�¼�������������۵�ѹ���ַ����ԣ�Ҳ��Ӱ�쵽ͨ�����۲۵�ѹ�жϵ��۵�������Ũ�ȡ���ͳ�Ŀ����㷨��������ȳ���100 mVʱ�Ż�Ե��۽����쳣�������ִ����IJۿ�ϵͳ���Ƕ�������Ȼ��ֶ���ȼ����Բ�ͬ�ȼ��ķ��Ƚ��в�ͬ�Ŀ��ơ�����ʹ���˾��������ϵͳ�ĸ�˹���������ʣ�����һ���̶�������������������ɡ��ۺϺ������������������ɲ�����С�ķ����Ը��š�Ϊ���ܷ�Ӧ��ʵ�ĵIJ����ڵ���仯�������ܱ����˲�Ч���ڲ���������Ҳ�ܿ������������ݹ��������㷨���������䣬��ֵ��Ϊ70 mV���ز���������Ϊ[40 mV, 100 mV]�����������۵�ѹ�仯�����趨�Ļز���������ʱ��������һ���˲������ŵ���仯��ƽ�����ﵽ�ز���������ʱ����ת���ɿ������˲���һ���˲���ʱ�����ʽ���£�
 (16)
(16)
ʽ�У� Ϊ����һ���˲���ֵ��Ϊ��k�ε���ɼ�ϵͳ�õ���ֵ��Ϊ���ò����ڵ��貨���ȶ�֮���ܹ������Կ������˲��㷨������ȥ����������������ڶ������쳣��Ծ����֮ǰ������ۻ�����ʹ��һ�����˲�����Ҫ���ȶ��IJ����ڵ������¼����˲����棬������Ҫ����������
Ϊ����һ���˲���ֵ��Ϊ��k�ε���ɼ�ϵͳ�õ���ֵ��Ϊ���ò����ڵ��貨���ȶ�֮���ܹ������Կ������˲��㷨������ȥ����������������ڶ������쳣��Ծ����֮ǰ������ۻ�����ʹ��һ�����˲�����Ҫ���ȶ��IJ����ڵ������¼����˲����棬������Ҫ����������
 (17)
(17)
 (18)
(18)
ʽ(17)��(18)ʹ���ڵ��۲����ڵ��貨��֮���ܹ����ȶ��ĵ�������˲��������ܹ��ڲ����ڵ��貨����������ٵظ��ٵ��ȶ���IJ��Ρ�
2 ʵ���������
ʵ����õ�������Դ���ຣij�����ɼ��������������ڵ���ֵ�������ܹ���8053��������Ƶ��Ϊ1 Hz����ʵ�齫������ݷֱ���þ��俨�����˲���һ���˲�������ʽ�������˲�����ʵ������Ƚϣ��۲��˲�����ĸ����ԡ�
�������ɼ����ĵ�ѹ�����źż���õ�������ڵ��������ͬ�ں��ġ��������۵�ѹ����Ϊ�˷���������ݹ۲⣬�����ݱ�����С�������λ������1000���ٽ����˲����Ե��۵ļ���״̬�����˲�Ч���ĶԱȡ�
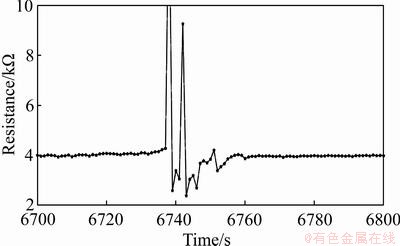
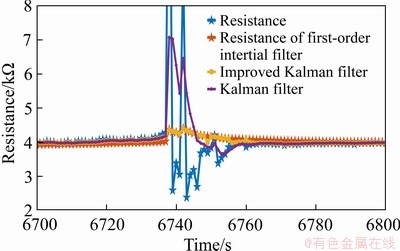
ͼ1��ʾΪƽ��״̬�µ��˲����ٹ켣����1����Ϊƽ��״̬�������˲��ľ��������Ƚϡ��Ա�ͼ1�е�80���ɼ����ݿ��Կ������ڵ��۱Ƚ��ȶ�������£�һ�����˲�ֻ����ǿ��ӳ��AL2O3Ũ�ȱ仯�����µIJ����ڵ���仯���ƣ��ӱ�1����ľ��������Ҳ�ɿ�����һ�����˲��ľ��������Ҫ�Ⱦ��俨�����˲���30%��������ʽ�������˲�������������һ�����˲���ʹ�ڵ��۱Ƚ��ȶ��������Ҳ���ܺõظ��ٲ����ڵ����ֵ��������ʽ�����������俨�����ڲ����ڵ����ȶ���������к�ǿ�ĸ������ܣ������ܱȽϺõط�ӳ�����ڵ���仯���ƣ�Ҳ�ܺܺõظ��ٲ����ڵ������ʵֵ���������ܸ���ȷ��ͨ������仯�жϵ��۵�Al2O3Ũ�ȱ仯��
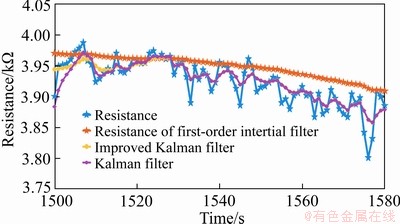
ͼ1 ƽ��״̬�µ��˲�ͼ�θ��ٹ켣
Fig. 1 Filtered graphics tracking trajectory in steady state
��1 ƽ��״̬�������˲��㷨�ľ��������Ա�
Table 1 Comparison of root mean square errors of three filtering algorithms in stationary state
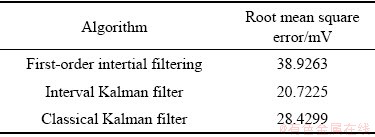
ͼ2(a)��ʾΪ����IJ���ֵ�仯���ߣ�ͼ2(b)��ʾΪ��Ӧ���˲�����仯���ߡ��ڿ������˲��㷨�У��˲�����Խ��ʾ��ǰ�IJ���ֵ���Ŷ�Խ�ߣ��˲�����ԽС�����ʾ��ǰ��Ԥ��ֵ���Ŷ�Խ�ߣ�һ�����˲�������ϵ��ͬ���������������У����۵ĵ���ƽ��״̬ʱ���˲���������ڲɼ�ֵ�����Է�ӳAl2O3Ũ�ȵı仯��Ϣ�����ǵ����۷�������Ͱڶ�ʱ�����ڴ�ʱ�Ѿ������ݵ���仯�жϵ����ڵ�Al2O3Ũ����Ϣ�������˲������Ҫ������Ԥ��ֵ����ͼ2�еĵ���仯��������Ӧ�ĵ��˲�����仯����������ʽ�������˲��;��俨�����˲�������ϵ�������������۵�״̬���仯��������Խƽ�ȣ�����ϵ��Խ����ͨ��һ�����˲�������ֻ��һ��������������ͨ��һ�����жϳ���ǰ���۵ĵ��״�����ı����˲����档
ͼ2 �����������˲�����仯����
Fig. 2 Change curves of sampling resistance and filtering gain
��ͼ2���Կ��������俨�����˲�������ϵ����Ȼ�ܹ������ŵ���仯״̬���ı䣬����������������Ͱڶ�ʱ����ϵ��Ҳ�Ƚϴ���������˳�����Ͱڶ��Ľ����������ʽ�������˲��ڵ������ڵ��跢���ڶ���������ʱ��ʹ��һ�����˲����д��������ǵ����۵ĵ��״���ȶ�֮������ʽ�������˲�����˲�����������¼��㣬�˲����������
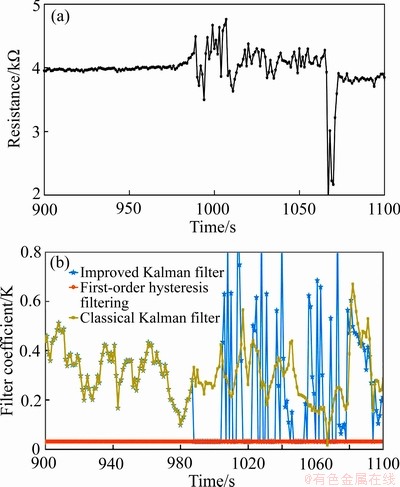
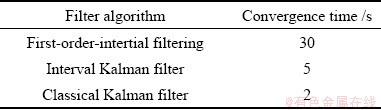
ͼ3��ʾΪ��������ڵ���IJ���ֵ��ͼ4��ʾΪ�ڲ������������ʹ�������˲��㷨��ͼ�αȽϣ���2����Ϊ��ͼ3�Ļ�����ʹ���˲��㷨������ʱ��Աȡ������������ٶ����������俨�����˲�������ʱ���һ�����˲��죬���DZ�����ʽ�������˲�����ԭ���Ǿ��俨�����ڵ��۷�������Ͱڶ�ʱҲ�����к�ǿ�ĸ������ԣ�����������Ͱڶ�����֮��û�н��˲�����������ã�����ʽ�������˲����˳�������Ͱڶ�֮����˲�����������¼��㣬�ڲ��������ȶ�֮����п��������������������۷�������Ͱڶ�֮������������˲�������ʱ����̣������ڲۿ��Ƚ��ȶ�ʱ��������Ŀ������˲��;��俨�����˲�һ�������Ž�ǿ�ĸ����ԣ�����������۵Ŀ������ṩ��ȷ����Ϣ��ʹ���ܸ��õؿ������������������Ч�ʡ�
ͼ5��ʾΪ�����˲��㷨���쳣��Ծ����ʱ���˲�Ч��ͼ���쳣��Ծ�����������ݡ�����������˹�������ԭ������ġ���ͼ5���˲�Ч��ͼ��֪��խ������һ�����˲��ڵ������е��쳣��Ծ���кܴ���ͺ������ͻ�Ӱ�쵽��Ϊ����µļ����������Ũ�ȵĸ��ٿ��ƣ�Ҳ�����ڼ�����Բɼ����ݽ����жϴ����������俨�����˲������һ�����˲����и���ĸ����ԣ���������������ʽ�������˲���ԭ����ǰ�����������Է���������
ͼ3 �������IJ���ֵ
Fig. 3 Sampling value of pin vibration resistance
ͼ4 �����������ԱȽ�
Fig. 4 Convergence comparison after needle vibration
��2 �����˲��㷨������ʱ��Ա�
Table 2 Convergence time comparison of three filtering algorithms
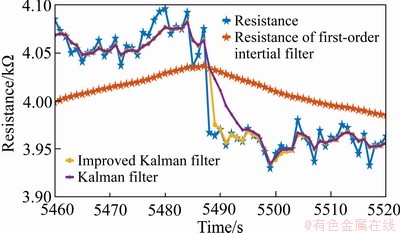
ͼ5 �쳣��Ծ����ʱ�������ԱȽ�
Fig. 5 Convergence comparison with abnormal step occurring
3 ����
1) ����Ŀǰ�������ҵ�ձ�Ӧ�õ�һ�����˲����������������ʽ�������˲���������Ӧ���������۲����ڵ���IJɼ����Ľ����㷨�ǰ�ǰһ�ε��˲�ֵ��Ϊ��һ�μ����״ֵ̬�����������õ��˲����䣬�ڵ��۷�������Ͱڶ�ʱ����һ�����˲���
2) ���������������㷨���˲�Ч������������һ���˲�����������Ⱦ��俨�����˲����ڵ��۷�������Ͱڶ�ʱ�ܵ���Ӱ���С�����˲�Ч�����á�
3) ������Ũ�ȱ仯����ĵ���仯��ʱ���ڿ���Ϊ�����Եģ�������������������Ա仯����ֵ������Լ������Ժܴ��ڵ��۵Ŀ��ƹ����У��ɽ��������Ⱥͳ���ʱ���жϵ��۵�״̬����Ҳ�ǽ����о��ص㡣
REFERENCES
[1] �� ��, ��ҵ��, ������, ��. �������̿����źŵ��˲�����������ģ�͵��о�[J]. ���Ͽ�ұѧԺѧ��, 1993, 24(3): 318-325.
LI Jie, LIU Ye-xiang, HUANG Yong-zhong, et al. Research on filtering and noise analytical model of control signal in aluminum electrolysis process[J]. Journal of Central-South Institute of Mining and Metallurgy, 1993, 24(3): 318-325.
[2] �� �, ������, �� ��, ��. 320 kAϵ��Ԥ�������۲۵�ѹ������Ƶ����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2009, 40(2): 299-304.
TANG Yi, ZHOU Yi-min, SHAN Feng, et al. Spectrum analysis of voltage fluctuations of 320 kA series prebaked aluminum electrolytic cells[J]. Journal of Central South University (Natural Science), 2009, 40(2): 299-304.
[3] �� ��, ������, �����. Ԥ������������ЧӦ������Ԥ������[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2001, 32(1): 32-35.
LI Yi, DING Feng-qi, LI Min-jun. Intelligent prediction method for anode effect of prebaked aluminum electrolyzer[J]. Journal of Central South University (Natural Science Edition), 2001, 32(1): 32-35.
[4] ֣ ��, �Ź��. ����Ӧ�������˲��ں��������쳣�����Ӧ���о�[J]. ��������ѧ��, 2016, 59(4): 1275-1283.
ZHENG Zheng, ZHANG Gui-bin. Application of adaptive Kalman filter in solving aviation gravity anomaly[J]. Chinese Journal of Geophysics, 2016, 59(4): 1275-1283.
[5] ��ʿ��, �� ��, ������, ��. ����Ӧ�����������˲�������SINS��ʼ���е�Ӧ��[J]. �人��ѧѧ��(��Ϣ��ѧ��), 2018, 43(11): 1667-1672, 1680.
GUO Shi-zhang, WU Miao, XU Jiang-ning, et al. Adaptive fading Kalman filter and its application in SINS initial alignment[J]. Geomatics and Information Science of Wuhan University, 2018, 43(11): 1667-1672, 1680.
[6] ZHAO Jun-bo. Dynamic state estimation with model uncertainties using H-infinity extended Kalman filter[J]. IEEE Transactions on Power Systems, 2018, 33(1): 1099-1100.
[7] SUN X, YAN G. Multi-sensor optimal weighted fusion incremental Kalman smoother[J]. Journal of Systems Engineering and Electronics (IEEE), 2018, 29(2): 262-268.
[8] JOHN L, TORBEN K. A new continuous discrete unscented Kalman filter[J]. IEEE Transactions on Automatic Control, 2019, 64(5): 2198-2205.
[9] ARASARATNAM I, HAYKIN S, HURD T R. Cubature Kalman filtering for continuous-discrete systems: Theory and simulations[J]. IEEE Transactions on Signal Processing, 2010, 58(10): 4977-4993.
[10] �����, �� ��, ������, ��. ����ʵ���ɶ�Ȧ����չ�������˲�λ�Ʒ���������[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2016, 47(5): 1722-1729.
XU Guo-wen, HE Chuan, WANG Jun-yon, et al. Inverse analysis method of extended Kalman filter displacement based on measured loosened loops[J]. Journal of Central South University (Science and Technology), 2016, 47(5): 1722-1729.
[11] �� ��, ��С��. ״̬����Ӧ���������˲��㷨������ˮ�»���Ŀ������е�Ӧ��[J]. ����ѧ��, 2019, 40(2): 361-368.
MA Yan, LIU Xiao-dong. State adaptive unscented Kalman filtering algorithm and its application in underwater maneuvering target tracking[J]. Acta Armamentarii, 2019, 40(2): 361-368.
[12] ����ΰ, ��һ��, ���ƾ�, ��. ���ڵ���ϵͳ��̬״̬���ƵĸĽ�³�����������˲��㷨[J]. ����ϵͳ�Զ���, 2018, 42(10): 87-92.
QU Zheng-wei, DONG Yi-bing, WANG Yun-jin, et al. Improved robust unscented Kalman filter algorithm for dynamic state estimation of power systems[J]. Automation of Electric Power Systems, 2018, 42(10): 87-92.
[13] ��ҵ��. �ִ������[M]. ����: ұ��ҵ������, 2008: 427.
LIU Ye-xiang. Modern aluminum electrolysis[M]. Beijing: Metallurgical Industry Press, 2008: 427.
[14] �� ��, ��ˮƽ, �� �. 350 kA�����۲۵����źŵ�Ƶ����[J]. �Զ���������Ӧ��, 2005, 24(12): 68-70.
DING Lei, ZENG Wei-ping, ZENG Yan. Spectrum analysis of resistance signal of 350 kA aluminum electrolyzer[J]. Automation Technology and Applications, 2005, 24(12): 68-70.
Kalman filter-based segmented aluminum electrolytic cell slot-like resistance acquisition algorithm
DENG Lian-wen1, LIU Guo-tao1, ZHAO Yan1, JANG Hai-bing1, CHEN Hong-fei2, HANG Sheng-xiang1
(1. School of Physics and Electronics, Central South University, Changsha 410083, China;
2. Hunan Leader Intelligent Technology Co., Ltd., Changsha 410083, China)
Abstract: Aiming at the current problems of the aluminum electrolytic cell's inaccurate collection of slot-like resistance and high delay, this paper proposed an interval slot-like resistance acquisition algorithm based on Kalman filtering. This algorithm is based on Kalman filtering and uses the mean squared error of predicted and sampled values to characterize their Gaussian white noise power, enabling it to have strong tracking performance in the state of stable cell resistance. Combined with the strength of first-order inertial filtering characteristics and the strong tracking advantage of Kalman filtering, an applicable filtering interval is set to ensure that the combined algorithm can filter out the influence of noise when the slot-like resistance fluctuates greatly, and can quickly converge the slot-like resistance after the electrolytic cell is on stable track. The simulation results show that compared with the first-order inertial filter, the improved Kalman filter reduces the root mean square error by 50% when the cell resistance is stable, and reduces the convergence time by 90% after the electrolytic cell regenerates needle vibration and swing.
Key words: aluminum electrolysis; resistance acquisition; Kalman filter algorithm; first-order inertial filtering
Received date: 2020-02-25; Accepted date: 2020-06-26
Corresponding author: ZHAO Yan; Tel: +86-13520255191; E-mail: zhaoy_ee@csu.edu.cn
(�༭ ��ѧ��)
�ո����ڣ�2020-02-25�������ڣ�2020-06-26
ͨ�����ߣ��� �ң���ʦ����ʿ���绰��13520255191��E-mail��zhaoy_ee@csu.edu.cn

