≥›¬÷ŌĶÕ≥ĶńKVļÕNSDĹ”ī•Ń¶ń£–Õ∂‘Ī»—–ĺŅ
ő‚ņŲĺÍ£¨Ő∆ĹÝ‘™£¨≥¬ňľ”Í
(÷–ńŌīů—ß ĽķĶÁĻ§≥Ő—ß‘ļ£¨łŖ–‘ń‹łī‘”÷∆‘žĻķľ“÷ōĶ„ Ķ—ť “£¨ļĢńŌ ≥§…≥£¨410083)
’™“™£ļ≤…”√Kelvin-Voigt(KV)Ĺ”ī•Ń¶ń£–ÕļÕ∑«ŌŖ–‘ĶĮĽ…-◊ŤńŠ(NSD)Ĺ”ī•Ń¶ń£–ÕĹ®ŃĘĶ•◊‘”…∂»≥›¬÷īę∂Į≥ŚĽų∂ĮѶ—ßń£–Õ£¨ń£–ÕŅľ¬« ĪĪšł’∂»ļÕľšŌ∂°£—°»°ŃŅłŔ“ĽĽĮĶń◊™ňŔĪ»ő™Ņō÷∆≤ő ż£¨◊™ĺōļÕ≥ŚĽų◊ŤńŠĪ»ŌĶ żő™ĪšĽĮŃŅ£¨‘ň”√ŃķłŮ-Ņ‚ňĢ ż÷Ķ∑÷őŲ∑Ĺ∑®£¨«ůĹ‚Ķ√ĶĹKVń£–ÕļÕNSDń£–Õ‘ŕŌŗÕ¨≤ő żŐűľĢŌ¬ĶńŌŗÕľļÕ∑÷≤ŪŌž”¶«ķŌŖ°£‘ŕĶÕňŔĪ»ŐűľĢŌ¬£¨∂ĮŐ¨Ōž”¶ĽýĪĺŌŗÕ¨£Ľ‘ŕłŖňŔĪ»ŐűľĢŌ¬£¨≤ĽÕ¨Ĺ”ī•Ń¶ń£–ÕŐűľĢŌ¬ĶńŌž”¶īś‘ŕ≤ÓĪū°£≤…”√≤ĽÕ¨◊ŤńŠń£–Õ∂‘ŌĶÕ≥ĶÕ∆ĶŌž”¶”įŌž≤Ľīů£¨∂‘łŖ∆ĶŌž”¶Ķń”įŌžĪ»ĹŌīů£¨‘ŕNSDń£–Õ÷–£¨ňś◊Ň≥ŚĽų◊ŤńŠŌĶ żĶńłńĪš£¨Ļ≤’Ů«ÝĶńŌž”¶ĽŠ ‹ĶĹ”įŌž°£
ĻōľŁī £ļ≥›¬÷īę∂ĮŌĶÕ≥£ĽĹ”ī•Ń¶ń£–Õ£Ľ≥ŚĽų£Ľ∑«ŌŖ–‘Ōž”¶
÷–Õľ∑÷ņŗļŇ£ļTH113.1 őńŌ◊ĪÍ÷嬎£ļA őń’¬ĪŗļŇ£ļ1672-7207(2014)05-1443-06
Comparative study of Kelvin-Voigt and nonlinear spring and damping contact force models of gear system
WU Lijuan, TANG Jinyuan, CHEN Siyu
(State Key Laboratory of High Performance and Complex Manufacturing,
School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract: The single-degree-of-freedom gear dynamic transmission system with time-varying stiffness and backlash was established adopting two different contact force models, Kelvin-Voigt (KV) contact force model and nonlinear spring and damping (NSD) contact force model. The dimensionless velocity was regarded as the controlling parameter, the Runge-Kutta numerical integration of the differential equations was carried out at different torque values and impact damping ratio conditions. The bifurcation graphs and phase graphs were deduced. At low frequency, the dynamic responses are similar. However, the dynamic responses are different at high frequency. The dynamic responses are affected with the increase of impact damping ratio in the Nonlinear spring and damping contact force model.
Key words: gear system; contact force model; impact; nonlinear dynamic responses
≥›¬÷īę∂ĮŌĶÕ≥÷–£¨į≤◊įőů≤Ó°Ę÷∆‘žőů≤Ó°ĘľšŌ∂Ķ»“ÚňōĶľ÷¬īę∂Į◊į÷√≤ķ…ķŇŲ◊≤ļÕ≥ŚĽų£¨”įŌž≥›¬÷īę∂ĮŌĶÕ≥Ķń∂ĮŐ¨–‘ń‹ļÕīę∂Įĺę∂»£¨“Úīň£¨∂‘ļ¨ľšŌ∂ļÕ≥ŚĽųŇŲ◊≤ŌĶÕ≥ĽķņŪĶń—–ĺŅĺŖ”–÷ō“™“‚“Ś°£≥›¬÷∂ĮѶ—ß—–ĺŅ÷–£¨Ĺ”ī•Ń¶ń£–ÕĶń—°‘Ů∂‘∂ĮѶ—ßĹ®ń£”Ž∑÷őŲ ģ∑÷ĻōľŁ[1]°£2łŲĶĮ–‘ŐŚĹ”ī•Ń¶ń£–ÕĹ®ŃĘ÷ų“™”–“‘Ō¬4÷÷∑Ĺ∑®£ļĽ÷łīŌĶ ż∑®[2]°Ę •ő¨ńŌ∑®[3]°Ę∑«ŌŖ–‘”–Ōř‘™∑®ļÕĶĮĽ…-◊ŤńŠń£–Õ∑Ĺ∑®[4-5]£¨Ľ÷łīŌĶ ż∑®ļÕĶĮĽ…-◊ŤńŠń£–Õ∑Ĺ∑®‘ŕłų÷÷…śľįĹ”ī•Ķń∂ĮѶ—ßő Ő‚—–ĺŅ÷–ĪĽĻ„∑ļ‘ň”√°£‘ŕĶĮĽ…-◊ŤńŠĶńѨ–ÝĹ”ī•ń£–Õ÷–£¨ľŔ∂®ŇŲ◊≤Ĺ◊∂ő «ŇŲ◊≤ѶѨ–Ý◊ų”√ĶńĻż≥Ő£¨ŇŲ◊≤√ś÷ģľš”…ĶĮĽ…ļÕ◊ŤńŠŃ¨Ĺ”£¨÷ĪĹ”ĹęŇŲ◊≤Ѷ“ż»ŽĶĹ∂ĮѶ—ßń£–Õ÷–£¨ĹŌ’ś ĶĶō√Ť ŲŃňŇŲ◊≤Ļż≥Ő°£ĶĮĽ…-◊ŤńŠĹ”ī•Ń¶ń£–Õ£¨÷ų“™”–Kelvin-Voigt ń£–Õ(KV)£¨Hertz°Įsń£–Õ(HS)£¨∑«ŌŖ–‘ĶĮĽ…-◊ŤńŠń£–Õ(NSD)°£KVń£–Õ[6]Ņľ¬«Ĺ”ī•Ļż≥Ő÷–ĶńĶĮ–‘Īš–őļÕń‹ŃŅļń…Ę£¨≤…”√ŌŖ–‘Ĺ”ī•ł’∂»ļÕ◊ŤńŠ°£≥¬ňľ”ÍĶ»[7]∂‘ł√ĶĮ–‘Ĺ”ī•Ń¶ń£–ÕĹÝ––ŃňŌŗĻō—–ĺŅ°£Ķę «£¨Hertz°Įsń£–Õ÷ĽŅľ¬«ĶĮ–‘Īš–ő∂ÝőīŅľ¬«◊ŤńŠ£¨Ľ÷łīŌĶ ż»°1°£Hertz°Įsń£–Õ√Ť ŲĶń «īŅĶĮ–‘Ĺ”ī•Ļż≥Ő£¨‘ŕĹ”ī•ĶńĻż≥Ő÷–≤Ľīś‘ŕń‹ŃŅĶńňūļń°£DubowskyĶ»[8]»Ōő™¬÷≥›ľšĶńĹ”ī•Ń¶ «”ŽŌŗ∂‘Īš–őļÕ≥ŚĽųňŔ∂»ŌŗĻōĶń∑«ŌŖ–‘ļĮ ż°£‘ŕHertz°Įs ń£–ÕĶńĽýī°…Ō£¨HuntĶ»[9]ŐŠ≥ŲŅľ¬«∑«ŌŖ–‘◊ŤńŠŌÓĶńĶĮĽ…-◊ŤńŠń£–Õ(NSD)°£“—”–—–ĺŅĪŪ√ų£ļ≤ńŃŌ◊ŤńŠŌĶ ż∑«≥£–° Ī£¨KVń£–Õń‹ĹŌļ√Ķō√Ť ŲĶ•◊‘”…∂»ū§ĶĮ–‘ŇŲ◊≤ŌĶÕ≥Ķń∂ĮѶ—ßŌž”¶£¨Ķę «ł√ń£–Õ÷–ĶńŇŲ◊≤Ѷń£–Õ√Ľń‹◊ľ»∑√Ť ŲĹ”ī•Ļż≥Ő÷–Ķńń‹ŃŅ◊™ĽĽ[10]£¨ī”∂Ý“ż»Ž≥Ŕ÷Õ◊ŤńŠŌÓ£¨Ķ√ĶĹNSDń£–Õ£¨≤ĘĶ√ĶĹĻ„∑ļ”¶”√[11]°£MachadoĶ»[12]◊Ř ŲŃňĽý”ŕHertz°ĮsĽýī°ņŪ¬ŘĹ®ŃĘĶńłų÷÷Ĺ”ī•Ń¶ń£–Õ∂ĮѶ—ßŌž”¶÷ģľšĶń≤ÓĪū°£AjiboseĶ»[5]∂‘Ī»∑÷őŲŃň∂ŗŐŚ∂ĮѶ—ßŌĶÕ≥÷–≤…”√’‚3÷÷≤ĽÕ¨Ĺ”ī•Ń¶ń£–ÕĶńŌĶÕ≥Ōž”¶°£‘ŕ≥›¬÷∂ĮѶ—ß—–ĺŅ∑Ĺ√ś£¨AzarĶ»[13]Ĺę∑«ŌŖ–‘≥Ŕ÷Õ◊ŤńŠń£–Õ“ż»ŽĶĹ≥›¬÷īę∂ĮŌĶÕ≥Ķń≥ŚĽų∂ĮѶ—ßŌž”¶—–ĺŅ÷–£¨∂‘Ī»∑÷őŲŃň ż÷Ķ∑¬’śļÕ ‘—ťĹŠĻŻ£¨ š≥Ų÷Š ‘—ťĹŠĻŻ÷§√ųŃň ż÷Ķń£ń‚Ķń’ż»∑–‘°£KimĶ»[14]“≤Ĺę∑«ŌŖ–‘≥Ŕ÷Õ◊ŤńŠ“ż»ŽĶĹ≥›¬÷īę∂ĮŌĶÕ≥∂ĮѶ—ßń£–Õ£¨≤…”√–≥≤®∆Ĺļ‚∑®ļÕ ż÷Ķ∑÷őŲ∑®—–ĺŅŌĶÕ≥ļ¨”–ľšŌ∂ļÕ≤ĽįŁļ¨ľšŌ∂«ťŅŲŌ¬£¨Ķ√ĶĹŌĶÕ≥Ķń∆Ķ∆◊Őō–‘«ķŌŖ“‘ľįŌĶÕ≥≥ŲŌ÷īő–≥ļÕ≥¨–≥Ōž”¶ĶńĻś¬…°£Īĺőń◊ų’Ŗ ‘ÕľĹ®ŃĘļ¨ľšŌ∂ĶńĶ•◊‘”…∂»≥›¬÷īę∂Į∂ĮѶ—ßń£–Õ£¨∑÷Īū≤…”√KVń£–ÕļÕNSDń£–Õ£¨∂‘Ī»—–ĺŅ≤ĽÕ¨ń£–ÕŐűľĢŌ¬Ķń∑ý∆ĶŌž”¶Őō–‘°Ę“‘ľįŌĶÕ≥≥ŲŌ÷Ī∂÷‹∆ŕ∑÷≤ŪļÕĽž„ÁĶńĻś¬…£¨∑÷őŲ≤…”√NSD≥ŚĽųń£–Õ Ī‘ŕ≤ĽÕ¨≥ŚĽų◊ŤńŠŌĶ żŐűľĢŌ¬ĶńŌĶÕ≥Ōž”¶°£
1 ≥›¬÷īę∂Į∂ĮѶ—ßń£–Õ
ĪĺőńĻĻĹ®Ķń≥›¬÷īę∂ĮőÔņŪń£–Õ»ÁÕľ1ňý ĺ°£∆š÷–£ļIpļÕIg∑÷ĪūĪŪ ĺ÷ų∂Į¬÷ļÕī”∂Į¬÷Ķń◊™∂ĮĻŖŃŅ£ĽRpļÕRg∑÷Īūő™÷ų∂Į¬÷ļÕī”∂Į¬÷ĶńĽý‘≤įŽĺ∂£ĽTpļÕTg∑÷Īūő™÷ų∂Į¬÷ļÕī”∂Į¬÷Ķń◊™ĺō£Ľ¶»pļÕ¶»g∑÷Īūő™÷ų∂Į¬÷ļÕī”∂Į¬÷ĶńĹ«őĽ“∆°£
”…”ŕľšŌ∂Ķńīś‘ŕ£¨Ĺę÷ų∂Į¬÷ļÕī”∂Į¬÷÷ģľšĶńŌŗ∂‘őĽ“∆∑÷ő™3÷÷«ťŅŲņīŐ÷¬Ř£¨∑÷Īū «≥›√ś≥ŚĽų£¨őřĹ”ī•≥ŚĽų◊īŐ¨ļÕ≥›Ī≥≥ŚĽų°£ľšŌ∂ļĮ żŅ…ĪŪ ĺő™

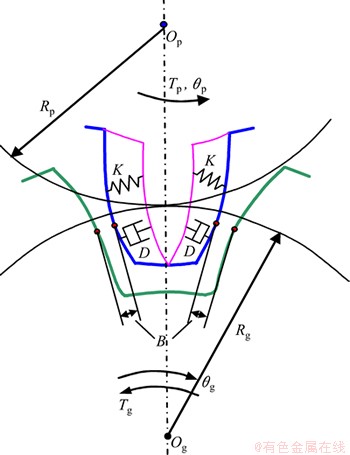
Õľ1 ¬÷≥›īę∂ĮőÔņŪń£–Õ
Fig. 1 Physical model of gear transmission system
∆š÷–£ļ∂®“Ś∂ĮŐ¨īęĶ›őů≤Ó £¨“ż»Žĺ≤Ő¨īęĶ›őů≤Óe(t)£¨“Úīň£¨—ōńŲļŌŌŖ∑ĹŌÚĶńŌŗ∂‘őĽ“∆
£¨“ż»Žĺ≤Ő¨īęĶ›őů≤Óe(t)£¨“Úīň£¨—ōńŲļŌŌŖ∑ĹŌÚĶńŌŗ∂‘őĽ“∆ £¨bĪŪ ĺ¬÷≥›ľš◊ÓīůľšŌ∂÷ĶĶń1/2°£
£¨bĪŪ ĺ¬÷≥›ľš◊ÓīůľšŌ∂÷ĶĶń1/2°£
łýĺ›…Ō Ų∂®“Ś£¨ĹŠļŌKVĹ”ī•Ń¶ń£–Õ£¨Ņ…Ķ√ĶĹĶ•◊‘”…∂»≥›¬÷īę∂ĮŌĶÕ≥ĶńĹ”ī•-ŇŲ◊≤∂ĮѶ—ß∑Ĺ≥Őő™

∆š÷–£ļcmő™¬÷≥›ľšĶń≤ńŃŌ◊ŤńŠŌĶ ż£Ľk(t)ő™¬÷≥›ľšĶńńŲļŌł’∂»°£
¬÷≥›≥ŚĽųѶľÚĶ•Ķō”√ū§–‘◊ŤńŠĪŪ ĺ£¨≤Ľń‹’ś ĶĶō∑ī”≥¬÷≥›≥ŚĽųŐō–‘°£łýĺ›HuntĶ»[9]ŐŠ≥ŲĶńŅľ¬«∑«ŌŖ–‘≥Ŕ÷Õ◊ŤńŠ£¨Ĺ®ŃĘNSDŌĶÕ≥∂ĮѶ—ßń£–Õ£¨ŌĶÕ≥∂ĮѶ—ß∑Ĺ≥Őő™

∆š÷–£ļ≥Ŕ÷Õ◊ŤńŠŌĶ ż £Ľ
£Ľ ő™≥ŚĽų‘ň∂Į Ī≥ŚĽųĶ„ĶńňŔ∂»°£
ő™≥ŚĽų‘ň∂Į Ī≥ŚĽųĶ„ĶńňŔ∂»°£
‘ŕ≥›¬÷īę∂ĮŌĶÕ≥÷–£¨¬÷≥›ńŲļŌł’∂»k(t)ļÕĺ≤Ő¨īęĶ›őů≤Óe(t)ĺýő™÷‹∆ŕĪšĽĮļĮ ż£¨Ņ…”√Fouriersľ∂ żĪŪ ĺő™£ļ
 £¨
£¨ £¨
£¨
 £¨
£¨


∆š÷–£ļk0ő™∆ĹĺýńŲļŌł’∂»£Ľkiő™–≥≤®∑÷ŃŅ∑ý£Ľktpő™Ķ•≥›ńŲļŌł’∂»£Ľ ő™≥ű ľŌŗőĽ£Ľ
ő™≥ű ľŌŗőĽ£Ľ ő™≥›¬÷īę∂ĮŌĶÕ≥Ķń◊™ňŔ£¨RICő™÷ōļŌ∂»£Ľe0ő™ĺ≤Ő¨ľ§ņÝĶń∆Ĺĺý÷Ķ£Ľeiő™ľ§ņÝĶń–≥≤®∑÷ŃŅ∑ý÷Ķ°£
ő™≥›¬÷īę∂ĮŌĶÕ≥Ķń◊™ňŔ£¨RICő™÷ōļŌ∂»£Ľe0ő™ĺ≤Ő¨ľ§ņÝĶń∆Ĺĺý÷Ķ£Ľeiő™ľ§ņÝĶń–≥≤®∑÷ŃŅ∑ý÷Ķ°£
”…”ŕ Ĺő™įŽĺ≤∂®∑Ĺ≥Ő◊ť£¨Õ¨ Īő™łŁ∑ĹĪ„ĶōĹÝ––«ůĹ‚£¨“ż»ŽĶ»–ßľĮ÷–÷ ŃŅ £¨Õ‚◊ų”√Ѷ
£¨Õ‚◊ų”√Ѷ £¨≤ĘŃÓ
£¨≤ĘŃÓ £¨
£¨ £¨
£¨ £¨
£¨ £¨
£¨ £¨
£¨
 °£ő™≤Ľ ß“Ľį„–‘£¨∑Ĺ≥Ő÷–Ķń
°£ő™≤Ľ ß“Ľį„–‘£¨∑Ĺ≥Ő÷–Ķń ļÕ
ļÕ »‘”√xļÕtĪŪ ĺ°£“Úīň£¨ ĹĹÝ––ŃŅłŔ“ĽĽĮī¶ņŪļů£¨Ņ…Ķ√
»‘”√xļÕtĪŪ ĺ°£“Úīň£¨ ĹĹÝ––ŃŅłŔ“ĽĽĮī¶ņŪļů£¨Ņ…Ķ√


Õ¨ņŪ£¨∂‘ ĹĹÝ––ŃŅłŔ“ĽĽĮī¶ņŪļů£¨Ņ…Ķ√

ļĮ żf1ļÕf2Ņ…“‘–ī≥…


∆š÷–£ļ ő™≥Ŕ÷Õ◊ŤńŠŌĶ żĪ»°£
ő™≥Ŕ÷Õ◊ŤńŠŌĶ żĪ»°£
2 ≤ĽÕ¨ľ§ņÝŐűľĢŌ¬Ķń≥›¬÷īę∂Į∑«ŌŖ–‘∂ĮѶ—ßŌž”¶Őō–‘
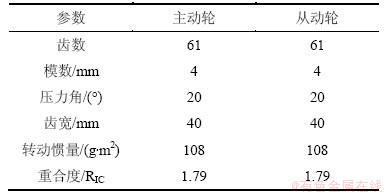
÷ų∂Į¬÷”Žī”∂Į¬÷Ķńľłļő≤ő ż…Ť÷√»ÁĪŪ1ňý ĺ°£
ĪŪ1 ≥›¬÷ŌĶÕ≥ľłļő≤ő ż
Table 1 Geometric parameters of gear system
‘ŕÕľ1 ňý ĺĶńőÔņŪń£–Õ÷–£¨»°ľšŌ∂2b=7.34°Ń10-4 m£Ľ≤ńŃŌ◊ŤńŠĪ» =0.05£Ľ≥Ŕ÷Õ◊ŤńŠĪ»
=0.05£Ľ≥Ŕ÷Õ◊ŤńŠĪ» =0.02£ĽłĶņÔ“∂ľ∂ żN=1£¨M=1£ĽÕ‚‘ōļ…Tp=500 N°§m£ĽÕ‚ľ§ņÝf1=0.2£Ľ≥ű ľŌŗőĽ
=0.02£ĽłĶņÔ“∂ľ∂ żN=1£¨M=1£ĽÕ‚‘ōļ…Tp=500 N°§m£ĽÕ‚ľ§ņÝf1=0.2£Ľ≥ű ľŌŗőĽ =0°£‘ŕ√Ľ”–Őō ‚ňĶ√ųĶń«ťŅŲŌ¬£¨ŌĶÕ≥≤ő żĶń÷Ķ≤ĽĪš£¨»°∆Ķ¬
=0°£‘ŕ√Ľ”–Őō ‚ňĶ√ųĶń«ťŅŲŌ¬£¨ŌĶÕ≥≤ő żĶń÷Ķ≤ĽĪš£¨»°∆Ķ¬  ő™Ņō÷∆≤ő ż°£
ő™Ņō÷∆≤ő ż°£
2.1 ‘ōļ…ļÕ◊™ňŔ∂‘≤ĽÕ¨Ĺ”ī•Ń¶ń£–ÕĶń”įŌž
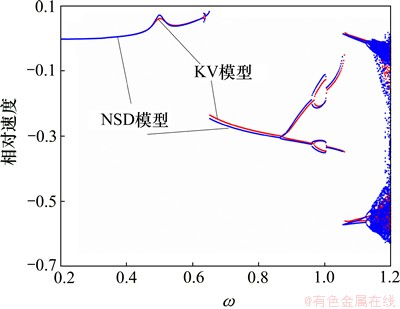
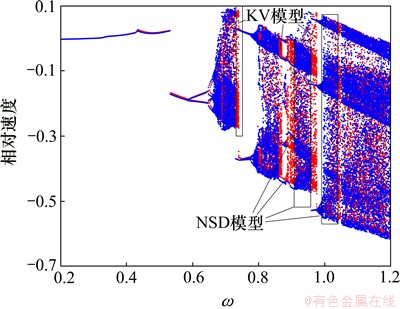
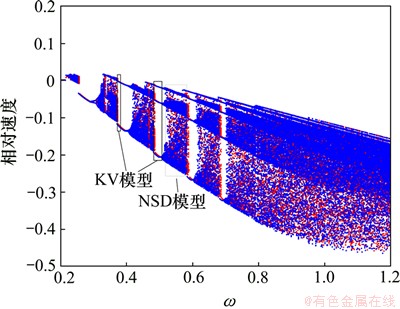
Õľ2ňý ĺő™Tp=1 000 N°§m£¨f1=0.2£¨¶ō=[0.2, 1] Ī≥›¬÷īę∂ĮŌĶÕ≥Ōŗ∂‘ňŔ∂»∑÷≤ŪÕľ°£Õľ3ňý ĺő™Tp=500 N°§m£¨f1=0.2, ¶ō=[0.2, 1.2] Ī≥›¬÷īę∂ĮŌĶÕ≥Ōŗ∂‘ňŔ∂»∑÷≤ŪÕľ°£Õľ4ňý ĺő™Tp=500 N°§m£¨f1=0.2, [0.85, 1] Ī≥›¬÷īę∂ĮŌĶÕ≥Ōŗ∂‘ňŔ∂»∑÷≤ŪÕľ°£Õľ5ňý ĺő™Tp=100 N°§m£¨f1=0.2£¨¶ō=[0.2, 1.2] Ī≥›¬÷īę∂ĮŌĶÕ≥Ōŗ∂‘ňŔ∂»∑÷≤ŪÕľ°£KVń£–ÕļÕNSDń£–ÕĶńŌĶÕ≥Ōž”¶ĹŠĻŻ»ÁÕľ2~4ňý ĺ°£ī”Õľ2~4Ņ…ľŻ£ļňś◊Ň◊™ĺōĶńľű–°£¨¬÷≥›≥ŚĽųŌĶÕ≥‘ŕĶÕ∆Ķ«Ý”ÚłŁ»›“◊ĹÝ»ŽĽž„Á◊īŐ¨°£‘ŕTp=1 000 N°§mļÕTp=100 N°§mŐűľĢŌ¬£¨KVń£–ÕļÕNSDń£–ÕĶń∑«ŌŖ–‘∂ĮѶ—ßŌž”¶ľłļűŌŗÕ¨°£‘ŕTp=1 000 N°§mŐűľĢŌ¬£¨¶ō=[0.2, 1.0]Ķń«ÝľšńŕŌĶÕ≥≤Ľ≥ŲŌ÷Ľž„ÁŌ÷Ōů£¨‘ŕTp=100 N°§m‘ōļ…ŐűľĢŌ¬£¨ŌĶÕ≥÷–∂ŗīő≥ŲŌ÷”…÷‹∆ŕĹ‚ĺ≠Ļż’ů∑Ę–‘¬∑ĺ∂ĹÝ»ŽĽž„Á‘ň∂Į°£ĶĪTp=500 N°§m Ī£¨‘ŕĶÕ∆Ķ«Ý£¨KVń£–ÕĶńŌž”¶”ŽNSDń£–ÕĶńŌž”¶ĽýĪĺŌŗÕ¨£¨Ī∂÷‹∆ŕ∑÷≤ŪĶ„≥ŲŌ÷Ķń∆Ķ¬ ”–ĹŌ–°≤Ó“ž°£‘ŕłŖ∆Ķ«Ý£¨KV≥ŚĽų∂ĮѶ—ßń£–ÕļÕNSD≥ŚĽų∂ĮѶ—ßń£–ÕĶń÷‹∆ŕ–‘īįŅŕĶńīů–°īś‘ŕ≤Ó“ž£¨∑÷Īūő™¶ō=[0.87, 0.89]ļÕ¶ō=[0.86, 0.91]°£‘ŕ÷‹∆ŕ–‘īįŅŕĶń∆Ķ¬ «Ýľšńŕ£¨∂ľīś‘ŕ÷‹∆ŕĹ‚∑Ę…ķĪ∂∑÷≤Ūī”∂Ý≥ŲŌ÷»űĽž„ÁŌ÷Ōů£¨ľŐ∂ÝÕňĽĮ≥…÷‹∆ŕ‘ň∂Į£¨‘ŕń≥◊™ňŔŐűľĢŌ¬”…’ů∑Ę–‘¬∑ĺ∂ĹÝ»ŽĽž„Á‘ň∂Į°£‘ŕTp=100 N°§mŐűľĢŌ¬£¨ŌĶÕ≥≥ŲŌ÷∂ŗī¶∑÷≤ŪļÕĽž„Á£¨ŌĶÕ≥∑«≥£łī‘”£¨KVń£–ÕļÕNSDń£–ÕĶń≤Ó“ž–‘≤Ľ√ųŌ‘°£
Õľ2 Tp=1 000 N°§m£¨f1=0.2£¨¶ō=[0.2, 1] Ī≥›¬÷īę∂ĮŌĶÕ≥Ōŗ∂‘ňŔ∂»∑÷≤ŪÕľ
Fig. 2 Bifurcation diagrams of relative velocity of gear system at Tp=1 000 N°§m£¨f1=0.2£¨¶ō=[0.2, 1]
Õľ3 Tp=500 N°§m£¨f1=0.2, ¶ō=[0.2, 1.2] Ī≥›¬÷īę∂ĮŌĶÕ≥Ōŗ∂‘ňŔ∂»∑÷≤ŪÕľ
Fig. 3 Bifurcation diagrams of relative velocity of gear system at Tp=500 N°§m£¨f1=0.2, ¶ō=[0.2, 1.2]
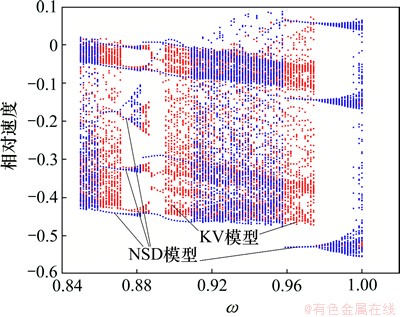
Õľ4 Tp=500 N°§m£¨f1=0.2, [0.85, 1] Ī≥›¬÷īę∂ĮŌĶÕ≥Ōŗ∂‘ňŔ∂»∑÷≤ŪÕľ
Fig. 4 Bifurcation diagrams of relative velocity of gear system at Tp=500 N°§m£¨f1=0.2, ¶ō=[0.85, 1]
Õľ5 Tp=100 N°§m£¨f1=0.2£¨¶ō=[0.2, 1.2] Ī≥›¬÷īę∂ĮŌĶÕ≥Ōŗ∂‘ňŔ∂»∑÷≤ŪÕľ
Fig. 5 Bifurcation diagrams of relative velocity of gear system at Tp=100 N°§m£¨f1=0.2£¨¶ō=[0.2, 1.2]
ŌĶÕ≥÷–ĶńĻŐ”–◊™ňŔ¶ōn=2 482 r/min£¨‘ŕ¶ō=0.2ļÕ¶ō=0.875 ĪŌĶÕ≥Ķń Ķľ ◊™ňŔ∑÷Īūő™¶ł=496 r/minļÕ¶ł= 2 172 r/min°£Õľ6ňý ĺő™Tp=500 N°§m£¨f1=0.2, ¶ō=0.2 Ī≤ĽÕ¨Ķń◊™ňŔŐűľĢŌ¬ Ī≥›¬÷īę∂ĮŌĶÕ≥ĶńŌŗÕľ°£Õľ7ňý ĺő™Tp=500 N°§m£¨f1=0.2, ¶ō=0.875 Ī≤ĽÕ¨Ķń◊™ňŔŐűľĢŌ¬ Ī≥›¬÷īę∂ĮŌĶÕ≥ĶńŌŗÕľ°£ī”Õľ6ļÕ7Ņ…ľŻ£ļ‘ŕĶÕňŔŐűľĢŌ¬£¨≥ŚĽųѶń£–ÕĶń—°‘Ů∂‘ŌĶÕ≥Ōž”¶Ķń”įŌžļ‹–°°£‘ŕłŖňŔŐűľĢŌ¬£¨KVń£–Õ÷–≥ŲŌ÷Ľž„ÁŌž”¶£¨‘ŕNSDń£–Õ≥ŲŌ÷Ķń «∂ŗ÷‹∆ŕĹ‚‘ň∂Į°£
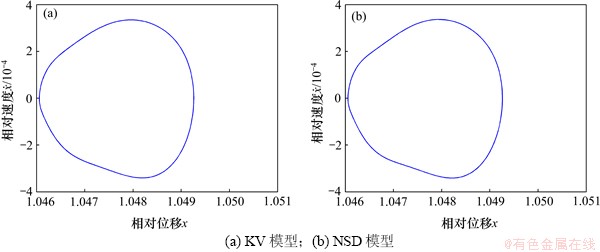
Õľ6 Tp=500 N°§m£¨f1=0.2, ¶ō=0.2 Ī≤ĽÕ¨Ķń◊™ňŔŐűľĢŌ¬ Ī≥›¬÷īę∂ĮŌĶÕ≥ĶńŌŗÕľ
Fig. 6 Phase graphs of gear system with different velocity conditions at Tp=500 N°§m£¨f1=0.2, ¶ō=0.2
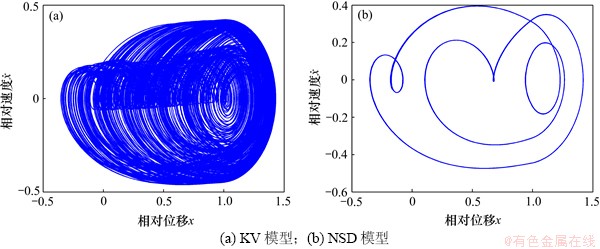
Õľ7 Tp=500 N°§m£¨f1=0.2, ¶ō=0.875 Ī≤ĽÕ¨Ķń◊™ňŔŐűľĢŌ¬ Ī≥›¬÷īę∂ĮŌĶÕ≥ĶńŌŗÕľ
Fig. 7 Phase graphs of gear system with different velocity conditions at Tp=500 N°§m£¨f1=0.2, ¶ō=0.875
2.2 ≤ĽÕ¨≥ŚĽų◊ŤńŠŌĶ ż∂‘NSDń£–ÕĶń∂ĮѶ—ßŌž”¶Ķń”įŌž
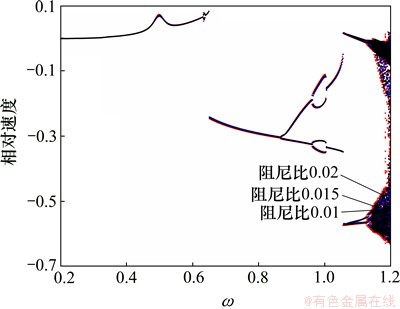
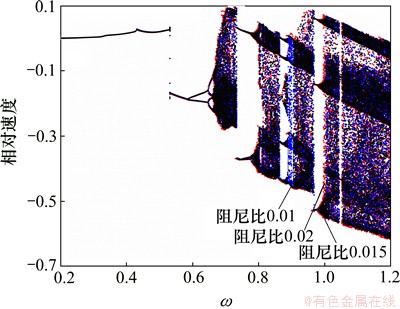
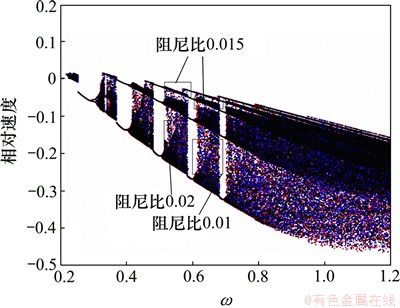
Õľ8ňý ĺő™Tp=1 000 N°§m£¨f1=0.2£¨¶ō=[0.2, 1.2]£¨ 2=[0.02, 0.015, 0.01] ĪNSDń£–ÕŐűľĢŌ¬≥›¬÷īę∂ĮŌĶÕ≥Ōŗ∂‘ňŔ∂»∑÷≤ŪÕľ°£Õľ9ňý ĺő™Tp=500 N°§m£¨f1=0.2£¨¶ō=[0.2, 1.2]£¨2=[0.02, 0.015, 0.01] ĪNSDń£–ÕŐűľĢŌ¬≥›¬÷īę∂ĮŌĶÕ≥Ōŗ∂‘ňŔ∂»∑÷≤ŪÕľ°£Õľ10ňý ĺő™Tp=100 N°§m£¨f1=0.2£¨¶ō=[0.2, 1.2]£¨2=[0.02, 0.015, 0.01] ĪNSDń£–ÕŐűľĢŌ¬≥›¬÷īę∂ĮŌĶÕ≥Ōŗ∂‘ňŔ∂»∑÷≤ŪÕľ°£ī”Õľ8~10Ņ…ľŻ£ļ‘ŕ≤ĽÕ¨Ķń≥ŚĽų◊ŤńŠŌĶ żŐűľĢŌ¬£¨ŌĶÕ≥Ķń÷‹∆ŕŌž”¶°Ę∑÷≤ŪļÕĽž„ÁĹŲ∑Ę…ķŌłőĘĶńĪšĽĮ°£‘ŕTp=1 000 N°§mļÕTp=100 N°§mŐűľĢŌ¬£¨ŌĶÕ≥Ōž”¶≤Ľ ‹≥ŚĽų◊ŤńŠŌĶ żĶńĪšĽĮĶń”įŌž£¨‘ŕTp=500 N°§mŐűľĢŌ¬£¨ŌĶÕ≥ĶńĻ≤’Ů«ÝĶńŌž”¶ĽŠ ‹ĶĹ”įŌž°£ňś◊Ň◊ŤńŠŌĶ żĶńĹĶĶÕ£¨ŌĶÕ≥łŁľ”»›“◊ĹÝ»ŽĽž„Á◊īŐ¨°£‘ŕ«Š‘ōŐűľĢŌ¬£¨≤ĽÕ¨◊ŤńŠ≤ő żŐűľĢŌ¬ĶńŌĶÕ≥ĶńŌž”¶÷ģľšĽýĪĺŌŗÕ¨°£
2=[0.02, 0.015, 0.01] ĪNSDń£–ÕŐűľĢŌ¬≥›¬÷īę∂ĮŌĶÕ≥Ōŗ∂‘ňŔ∂»∑÷≤ŪÕľ°£Õľ9ňý ĺő™Tp=500 N°§m£¨f1=0.2£¨¶ō=[0.2, 1.2]£¨2=[0.02, 0.015, 0.01] ĪNSDń£–ÕŐűľĢŌ¬≥›¬÷īę∂ĮŌĶÕ≥Ōŗ∂‘ňŔ∂»∑÷≤ŪÕľ°£Õľ10ňý ĺő™Tp=100 N°§m£¨f1=0.2£¨¶ō=[0.2, 1.2]£¨2=[0.02, 0.015, 0.01] ĪNSDń£–ÕŐűľĢŌ¬≥›¬÷īę∂ĮŌĶÕ≥Ōŗ∂‘ňŔ∂»∑÷≤ŪÕľ°£ī”Õľ8~10Ņ…ľŻ£ļ‘ŕ≤ĽÕ¨Ķń≥ŚĽų◊ŤńŠŌĶ żŐűľĢŌ¬£¨ŌĶÕ≥Ķń÷‹∆ŕŌž”¶°Ę∑÷≤ŪļÕĽž„ÁĹŲ∑Ę…ķŌłőĘĶńĪšĽĮ°£‘ŕTp=1 000 N°§mļÕTp=100 N°§mŐűľĢŌ¬£¨ŌĶÕ≥Ōž”¶≤Ľ ‹≥ŚĽų◊ŤńŠŌĶ żĶńĪšĽĮĶń”įŌž£¨‘ŕTp=500 N°§mŐűľĢŌ¬£¨ŌĶÕ≥ĶńĻ≤’Ů«ÝĶńŌž”¶ĽŠ ‹ĶĹ”įŌž°£ňś◊Ň◊ŤńŠŌĶ żĶńĹĶĶÕ£¨ŌĶÕ≥łŁľ”»›“◊ĹÝ»ŽĽž„Á◊īŐ¨°£‘ŕ«Š‘ōŐűľĢŌ¬£¨≤ĽÕ¨◊ŤńŠ≤ő żŐűľĢŌ¬ĶńŌĶÕ≥ĶńŌž”¶÷ģľšĽýĪĺŌŗÕ¨°£
Õľ8 Tp=1 000 N°§m£¨f1=0.2£¨¶ō=[0.2, 1.2]£¨2=[0.02, 0.015, 0.01] ĪNSDń£–ÕŐűľĢŌ¬≥›¬÷īę∂ĮŌĶÕ≥Ōŗ∂‘ňŔ∂»∑÷≤ŪÕľ
Fig. 8 Bifurcation diagrams of relative velocity of gear system with NSD contact force model at Tp=1 000 N°§m£¨f1=0.2£¨¶ō=[0.2, 1.2]£¨2=[0.02, 0.015, 0.01]
Õľ9 Tp=500 N°§m£¨f1=0.2£¨¶ō=[0.2, 1.2]£¨2=[0.02, 0.015, 0.01] ĪNSDń£–ÕŐűľĢŌ¬≥›¬÷īę∂ĮŌĶÕ≥Ōŗ∂‘ňŔ∂»∑÷≤ŪÕľ
Fig. 9 Bifurcation diagrams of relative velocity of gear system with NSD contact force model at Tp=500 N°§m£¨f1=0.2£¨¶ō=[0.2, 1.2]£¨2=[0.02, 0.015, 0.01]
Õľ10 Tp=100 N°§m£¨f1=0.2£¨¶ō=[0.2, 1.2]£¨2=[0.02, 0.015, 0.01] ĪNSDń£–ÕŐűľĢŌ¬≥›¬÷īę∂ĮŌĶÕ≥Ōŗ∂‘ňŔ∂»∑÷≤ŪÕľ
Fig. 10 Bifurcation diagrams of relative velocity of gear system with NSD contact force model at Tp=100 N°§m£¨f1=0.2£¨¶ō=[0.2, 1.2]£¨2=[0.02, 0.015, 0.01]
3 ĹŠ¬Ř
(1) łÝ≥Ų≥›¬÷īę∂ĮKVĹ”ī•Ń¶ń£–Õ”ŽNSDĹ”ī•Ń¶ń£–ÕĶń∑«ŌŖ–‘∂ĮѶ—ßŌž”¶ĶńĪ»ĹŌĹŠĻŻ°£
(2) KVĹ”ī•Ń¶ń£–Õ”ŽNSDĹ”ī•Ń¶ń£–ÕĶń∑«ŌŖ–‘∂ĮѶ—ßŌž”¶Ķń≤Ó“ž–‘”Ž‘ōļ…ĹŰ√‹ŌŗĻō°£
(3) ‘ŕĶÕňŔŐűľĢŌ¬£¨2÷÷Ĺ”ī•Ń¶ń£–ÕĶń∂ĮѶ—ßŌž”¶≤Ľīś‘ŕ≤Ó“ž–‘°£‘ŕłŖňŔŐűľĢŌ¬£¨KVń£–ÕĶń÷‹∆ŕ–‘īįŅŕĪ»NSDń£–ÕĶń÷‹∆ŕ–‘īįŅŕ–°°£
(4) ‘ŕNSD÷–£¨≥ŚĽų◊ŤńŠŌĶ ż÷ĪĹ””įŌžŌĶÕ≥∑«ŌŖ–‘ĶńŌž”¶£¨Ĺ”ī•Ń¶ń£–Õ÷–Ķń≥ŚĽų◊ŤńŠŌĶ ż—°»° ģ∑÷÷ō“™£¨Ļ§≥Ő Ķľ ÷–”¶ł√Õ®Ļż≤ńŃŌ–‘ń‹ Ķ—ť»∑∂®Ōŗ”¶Ķń≥ŚĽų◊ŤńŠŌĶ ż°£
≤őŅľőńŌ◊£ļ
[1] Vedmar L, Andersson A. A method to determine dynamic loads on spur gear teeth and on bearings[J]. Journal of Sound and Vibration, 2003, 267(10): 1065-1084.
[2] ¬řĻŕžŅ, –ĽĹ®Ľ™. ŃĹ◊‘”…∂»ň‹–‘ŇŲ◊≤’Ů∂ĮŌĶÕ≥Ķń∂ĮѶ—ß—–ĺŅ[J]. Ѷ—ß—ßĪ®, 2000, 32(5): 579-586.
LUO Guanwei, XIE Jianhua. Dynamics of a two-degree-of- freedom vibration system with perfectly plastic impacts[J]. Acta Mechanica Sinica, 2000, 32(5): 579-586.
[3] ∂°ňžŃŃ, ļťľő’Ů. »Š–‘∂ŗŐŚŌĶÕ≥Ĺ”ī•ŇŲ◊≤∂ĮѶ—ß—–ĺŅ[J]. …Ōļ£ĹĽÕ®īů—ß—ßĪ®, 2003, 28(12): 75-78.
DING Suiliang, HONG Jiazhen. Dynamic analysis of impact loads in flexible multibody systems by FEM[J]. Journal of Shanghai Jiaotong University, 2003, 28(12): 75-78.
[4] Tang J Y, Wang Q B, Wu L J, et al. Bifurcation analysis of impact model in gear transmission system[J]. Applied Mechanics and Materials, 2011, 86(11): 479-482.
[5] Ajibose O K, Wiercigroch M, Pavlovskaia E, et al. Contact force models and dynamics of a drifting oscillator[C]// ASME Conference Proceedings. San Diego. USA: ASME, 2009: 1387-1394.
[6] Goldsmith W. Impact: The theory and physical behaviour of colliding solids[M]. London, England, Edward Arnold Ltd., 2001: 1-379.
[7] ≥¬ňľ”Í, Ő∆ĹÝ‘™. ľšŌ∂∂‘ļ¨ń¶≤ŃļÕ ĪĪšł’∂»Ķń≥›¬÷ŌĶÕ≥∂ĮѶ—ßŌž”¶Ķń”įŌž[J]. Ľķ–ĶĻ§≥Ő—ßĪ®, 2009, 45(8): 119-124.
CHEN Siyu, TANG Jinyuan. Effect of backlash on dynamics of spur gear pair system with friction and time-varying stiffness[J]. Journal of Mechanical Engineering, 2009, 45(8): 119-124.
[8] Dubowsky J S F D, Costello H. The dynamic modeling of flexible spatial machine systems with clearance connections[J]. Journal of Mechanisms, Transmissions and Automation in Design, 1987, 109(7): 87-94.
[9] Hunt K H, Crossley F R E. Coefficient of restitution interpreted as damping in vibroimpact[J]. Journal of Applied Mechanics, 1975, 42(5): 440-445.
[10] Gilardi G, Sharf I. Literature survey of contact dynamics modelling[J]. Mechanism and Machine Theory, 2002, 37(10): 1213-1239.
[11] Silva P C, Martins J M. Evaluation of the contact forces developed in the lower limb/orthosis interface for comfort design[J]. Multibody System Dynamics,2010, 24(9): 367-388.
[12] Machado M, Moreira P, Flores P, et al. Compliant contact force models in multibody dynamics: Evolution of the Hertz contact theory[J]. Mechanism and Machine Theory, 2012, 53(7): 99-121.
[13] Azar R C, Crossley F R E. Digital simulation of impact phenomenon in spur gear systems[J]. Journal of Engineering for Industry, 1977, 99(8): 792-798.
[14] Kim T C, Rook T E. Effect of nonlinear impact damping on the frequency response of a torsional system with clearance[J]. Journal of Sound and Vibration,2005, 281(3/4/5): 995-1021.
(Īŗľ≠ Ķň¬ńŌŤ)
’łŚ»’∆ŕ£ļ2013-06-09£Ľ–řĽō»’∆ŕ£ļ2013-08-08
ĽýĹūŌÓńŅ£ļĻķľ“◊‘»ĽŅ∆—߼ýĹū◊ ÷ķŌÓńŅ(51275530)£ĽĻķľ“÷ōĶ„Ľýī°—–ĺŅ∑Ę’ĻĻśĽģ(°į973°Īľ∆Ľģ)ŌÓńŅ(2011CB706800)£Ľ—–ĺŅ…ķ◊‘÷ųŐĹňųīī–¬ĽýĹū◊ ÷ķŌÓńŅ(2013zzts198)
Õ®–Ň◊ų’Ŗ£ļŐ∆ĹÝ‘™(1962-)£¨ń–£¨ļĢńŌ”ņ÷›»ň£¨ĹŐ ŕ£¨ī” ¬≥›¬÷ľ”Ļ§ļÕ∂ĮѶ—ß—–ĺŅ£ĽĶÁĽį£ļ0731-88876350£ĽE-mail: jytangcsu@163.com

