DOI�� 10.11817/j.issn.1672-7207.2019.08.010
���ڶ�̬�����µ��ƶ��������������ϲ���
������,�∐,����,Ф����
���人��ѧ �������еѧԺ������ �人, 430072��
ժҪ:�������δ֪��̬�����ƶ������������������⣬���һ���ں϶�̬�ϰ��﷽���жϲ��Լ���Ŀ�����²��Ե�����Ӧģ���������Ż������㷨�������ݸ��㷨����ƶ������˱��Ͽ���ϵͳ�����ȣ������ƶ������˵��˶�ģ�ͣ���ȡ�����˵�Ŀ��Ƕȣ�Ȼ���ɳ�������������ȡ�ϰ��������Ϣ�����ϰ��������Ϣ�ж϶�̬�ϰ����˶���������Ŀ��㣻�����������Ӧģ��������ϵͳʵʱ��������˵�ת������ٶȣ�ʵ�ֶԻ�����ת��ǵĿ��ƣ�ʹ�������ܹ�����ײ�ص���Ŀ��㡣�о��������������������㷨�ܹ�ʹ�ƶ���������δ֪��̬������ʶ���ϰ���ж϶�̬�ϰ�����˶�������ʵ���������ϣ����������Ŀ�����²��ԣ��ƶ�������ƽ���ƶ��ٶ����11.75%����֤�������㷨����Ч�ԡ�
�ؼ���:�ƶ������ˣ���̬�ϰ����Ŀ�����ԣ�ģ�������磻��������
��ͼ�����:TP24 ���ױ�־��:A ���±��:1672-7207��2019��08-1833-07
Autonomous obstacle avoidance strategy for mobile robots in indoor dynamic environment
YANG��Minghui, WU��Yao, ZHANG��Yong, XIAO��Xiaohui
(School of Power and Mechanical Engineering, Wuhan University, Wuhan 430072, China)
Abstract: Aiming at the problem of autonomous obstacle avoidance for mobile robots in unknown indoor dynamic environment, an adaptive fuzzy neural network optimization obstacle avoidance algorithm was proposed, which integrates the dynamic obstacle direction judgment strategy and the sub-target point updating strategy. The obstacle avoidance control system of mobile robots was designed based on this algorithm. Firstly, the motion model of mobile robot was analyzed to obtain the target angle of the robot. Then, the distance information of obstacles was obtained by ultrasonic sensor, and the moving direction of dynamic obstacles was judged by the distance information of obstacles. The sub-target points were thus updated. Finally, the steering angle and speed of the robot were displayed in real time by using adaptive fuzzy neural inference system. The robot's steering angle was controlled to reach the target point without collision. The results show that the proposed algorithm enables mobile robots to recognize obstacles and judge the motion direction of dynamic obstacles in an unknown dynamic environment to achieve autonomous obstacle avoidance. Compared with the strategy of no sub-target point updating, the average moving speed of mobile robots is increased by 11.75%, which verifies the effectiveness of the proposed algorithm.
Key words: mobile robot; dynamic obstacles; sub-target point updating strategy; fuzzy neural network; autonomous obstacle avoidance
��δ֪���������У��ƶ�������Ӧ�þ߱���֪�����������Աܿ��ϰ��ʵ���Զ�����[1]�������ϰ��������̬�ϰ���Ͷ�̬�ϰ��Ŀǰ�����ڶഫ������Ϣ�ںϵı��Ϸ����Ѿ�����������Է�Ϊ��ͳ·���滮���������ܿ��Ʒ������ڴ�ͳ�����У��˹��Ƴ�����������ֱ��ͼ��(VFH)Ӧ����Ϊ�㷺���˹��Ƴ���ԭ��������ʵ�֣�������·���滮ʱ����Ŀ�겻�ɴ�;ֲ���Сֵ���⡣GUO��[2-3]ͨ���Ľ��Ƴ������������ֲ���С�㣬���ڶ�̬�����£��Ի����������ν�ı����˶�[4]��ULRICH��[5-6]��VFH�㷨�Ļ����������VFH+�㷨��VFH*�㷨��ZHANG��[7]�����VFH#�㷨�����㷨���Ƕ�̬�ϰ�����ٶ���Ϣ����Ӧ��̬������ZHU��[8]��VFH������������ٶ��жϹ�������Զ�̬�ϰ���ʱѡ������ʵ��ٶȷ�����ϵ�з���������Ϣ�洢��������������ѭ�������ܿ��Ʒ�������Ҫ����Ⱥ�㷨���Ŵ��㷨���������ģ�����ơ�CAI��[9]���һ����Ⱥ�㷨��ģ�����Ƽ�����ϵķ�ʽ����������[10]���һ�ֻ��ڸĽ���Ⱥ�㷨���ƶ������˶�̬·���滮�������������[11]�����һ�ֻ���֪ʶ���Ŵ��㷨������ר�ŵ��Ŵ����ӶԲ�����������Ӧ���������Ұѻ�����Ϣ���ϵ���Ⱥ��ʼ���С�������[12]�����һ�ֿɱ䳤Ⱦɫ����뷽ʽ�����Ұѵ�ͼ������ʵ�����㷨�ܹ��ھ�̬�Ͷ�̬���������������������ײ·����YANG��[13]������һ�ֲַ�ģ�����Ʋ��ԣ�ʵ���˻�������δ֪�����������ǿ��ɵ�[14]����˻��ڶ�̬��������ƶ������˵����㷨����Pioneer3-DX����������֤��ZHU��[15]�����һ�ֻ����������ѧϰ�㷨������ģ����ϵͳ�������Ⱥ���������������ƶ������˵Ĺ켣ƽ���ȡ�Ǯ���[16]����ģ����������ƣ�ʵ�����ƶ���������δ֪�����е��������ϣ���������Ŀ�귨����ֲ����塣�����ĵ�[17]���ñջ�ģ����������Ч�������ƶ������˵��н�·��������н��ٶȡ�������Ⱥ�㷨���Ŵ��㷨����ʵ�ֶ�̬�����������ϣ���������漰��������������������ʵʱ�Խϲģ�������緽���ں���ģ�����ƺ���������ŵ㣬�ھ�̬�ϰ��ﻷ���п�ʵ���������ϣ�����Զ�̬�ϰ���ʱ���������·������������ײ[18]����ˣ�����������ģ��������Ļ��������һ�ֶ�̬�ϰ�����Ϸ���������ʵ���ڶ�̬�����е��������ϣ������������н��ٶȡ�
1 �����˱���ģ��
���IJ������ֲʽ�ƶ�ƽ̨�������˵ı���ģ����ͼ1��ʾ��
���������k-1ʱ�̵�����Ϊ ����kʱ�̵Ļ���������Ϊ
����kʱ�̵Ļ���������Ϊ ��Ŀ�������Ϊ
��Ŀ�������Ϊ ��kʱ�̻�����������Ŀ�������ļн���Ŀ�꺽���
��kʱ�̻�����������Ŀ�������ļн���Ŀ�꺽��� ��ʾ��
��ʾ��
 (1)
(1)
ʽ�У� ��
��
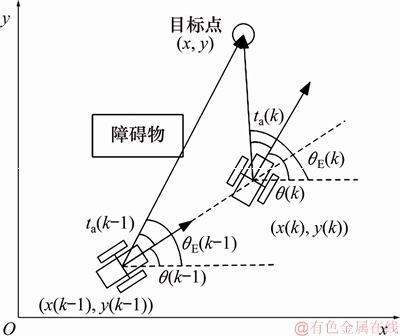
ͼ1���ƶ������˱���ģ��
Fig. 1��Mobile robot obstacle avoidance model
kʱ���ƶ������˵ĺ������Ϊ ��Ŀ��Ƕ�
��Ŀ��Ƕ� Ϊkʱ�̻�����Ŀ�꺽����뵱ǰ����ǵļнǣ�
Ϊkʱ�̻�����Ŀ�꺽����뵱ǰ����ǵļнǣ�
 (2)
(2)
ʽ�У����ɳ�����ϵͳ(UWB)�õĶ�λ��Ϣ����õ����ɸ߾���ת���Dz�á�
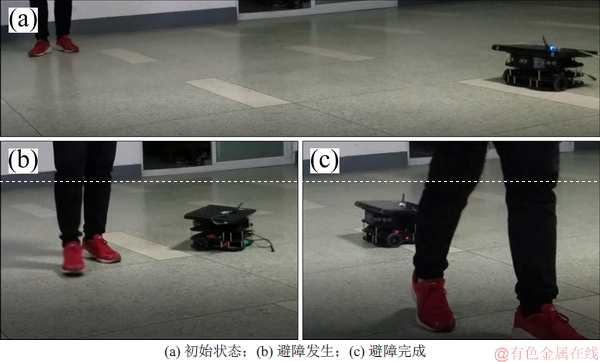
2 ��̬�ϰ�����ϲ���
����Զ�̬�ϰ���ʱ���������˲�����ȷ�ж��ϰ����˶���Ϣʱ�����ܲ�������·�����������ϰ������ײ����̬�ϰ�����ײ����ʾ��ͼ��ͼ2��ʾ���������˲���������תԭ��������������˶��Ķ�̬�ϰ���ʱ���ܼ�ʱ�ܿ��ϰ�����ϰ������ײ������ʧ�ܡ�
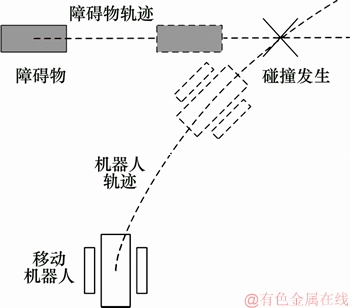
ͼ2����̬�ϰ�����ײ����ʾ��ͼ
Fig. 2��Diagram of dynamic obstacle collision scene
Ϊ��Ӧ��̬�ϰ��ﻷ�����������һ�ֶ�̬�ϰ�����ϲ��ԣ�����3�����֣���̬�ϰ����˶������жϲ������ж��ϰ�����˶��켣����Ŀ�����²������Ż������˱���·���Լ�ģ�����������������ת�ǿ��������ٶȿ�������
2.1����̬�ϰ��﷽���жϲ���
���˶������У���̬�ϰ�����˶�����������˵��˶���������ཻ��ƽ��2�������ͼ3��ʾΪ2��������ƶ����������˶������кͶ�̬�ϰ�����ܷ�����ײ�����е�λ����Ϣ������rΪ���������ϰ������ײ����뾶�����ĶԶ�̬�ϰ���������£��ϰ�����˶��������ڻ�����̽�ⷶΧ�ڣ��ϰ����˶��ٶȺ㶨���ϰ���Ĵ�С��֪��

ͼ3����̬�ϰ����⼰�����ж�
Fig. 3��Dynamic obstacle detection and direction judgment
�ƶ������˱�������2���滮���ڵĶ�̬�ϰ�������������λ����Ϣ������ Ϊ��ǰ�����ϰ����������ֱ���˶��켣�ľ��룬
Ϊ��ǰ�����ϰ����������ֱ���˶��켣�ľ��룬 Ϊ��һ�����ϰ����������ֱ���˶��켣�ľ��룬����㹫ʽΪ
Ϊ��һ�����ϰ����������ֱ���˶��켣�ľ��룬����㹫ʽΪ
 (3)
(3)
ʽ�У� ��
�� �ֱ��Ӧ5����������������ɨ��Ƕȣ�
�ֱ��Ӧ5����������������ɨ��Ƕȣ� ��
�� �ֱ��Ӧ5�������������������ϰ�����롣ͬʱ����5�����������ݶ��ϰ��﷽�����������жϣ����Լ��ٵ�����������������Ϊ��Ǵ�������
�ֱ��Ӧ5�������������������ϰ�����롣ͬʱ����5�����������ݶ��ϰ��﷽�����������жϣ����Լ��ٵ�����������������Ϊ��Ǵ�������
��ʽ(3)�ɵ�
 (4)
(4)
ʽ�У�tdΪ�ϰ����˶����� Ϊ�ƶ��������˶��ٶȣ�dtΪ������ڣ�
Ϊ�ƶ��������˶��ٶȣ�dtΪ������ڣ� Ϊ�趨�ľ�����ֵ��td=0��ʾ�ϰ�������Զ������ˣ��������ϴ�����td=-1��ʾ�ϰ�����Ի����������˶���td=1��ʾ�ϰ�����Ի����������˶�����2���滮�����ڣ�ͬһ���ϰ��ﵽ�ƶ��������˶��켣�ľ��뷢���仯�����ж�Ϊ��̬�ϰ��ﲢ����˶�����
Ϊ�趨�ľ�����ֵ��td=0��ʾ�ϰ�������Զ������ˣ��������ϴ�����td=-1��ʾ�ϰ�����Ի����������˶���td=1��ʾ�ϰ�����Ի����������˶�����2���滮�����ڣ�ͬһ���ϰ��ﵽ�ƶ��������˶��켣�ľ��뷢���仯�����ж�Ϊ��̬�ϰ��ﲢ����˶�����
2.2����Ŀ�����²���
��ͳ��ģ����������ϲ����ڼ��ϰ���ʱ��Ի����˵������ٶȽ��е����������ϰ���Խ���������ٶ�Խ��[17]������������Ŀ�����²��ԣ��ڻ������˶������У����ϰ����ʵʱ������Ŀ��㣬��ʱ������Ŀ��㣬������Ŀ���֮���ٽ�Ŀ������Ϊ��Ŀ��㣬���յõ��Ļ����˵��˶��켣����ͨ�������Ŀ��������Ŀ��㡣������Ŀ���֮������������Ŀ��Ƕ�ta��ø��£�����������������ٶȿ��������䣬�����˲����ٵ�����Ŀ��㣬���̻������˶�ʱ�䡣
�ƶ��������ڼ��ϰ���֮����������Ը���2�����ڵ��ϰ���λ����Ϣ�����ϰ�����˶��������˶��ٶ�(��ͼ3)��ϵͳ����Ԥ������˺��ϰ������¼������ڵ�λ����Ϣ����Ԥ�ڵ��ϰ����λ�û������ײ��������Ϊ��ײ���ܷ�����������Ŀ��㡣��ײ����뾶Ϊ�����˰뾶���ϰ���뾶֮�͡���ײ�����Բ����Ԥ����ײ����ʱ�ϰ����λ�á���Ŀ������ͨ��ʽ(5)ȷ����ƫת�������ϰ�����˶�����ȷ����
 (5)
(5)
ʽ�У� Ϊ�����˰뾶��
Ϊ�����˰뾶�� Ϊ�ϰ���뾶��
Ϊ�ϰ���뾶��
2.3��ģ��������
���IJ���T-S��ģ����������������������/�����ϵ��ӳ�䣬�����÷���(back propagation)�㷨����С���˷�����ɶ�����/������ݶԵĽ�ģ��ʹ����Ƴ�����ģ��������ϵͳ�ܹ����õ�ģ���ϣ���Ļ���ʵ�ʵ�����/�����ϵ[19]���������һ��7����2�����ģ�������磬��Ϊ5�㣬��ṹʾ��ͼ��ͼ4��ʾ��

ͼ4��ģ��������ṹʾ��ͼ
Fig. 4��Simplified structural diagram of fuzzy neural network
ģ��������ĵ�1��Ϊ����㡣����ÿ���ڵ�ֱ�������������ĸ��������ӣ�������ֵ���͵���һ�㡣���ĸò�Ľڵ���n=7������״̬�ռ�����IΪ
 (6)
(6)
��2��ÿ���ڵ����1�����Ա��������Ľ������ϰ��������Ϣd1��d2��d3��d4��d5��ΪN(��)��F(Զ)2���ȼ�����Ŀ��Ƕ�ta��Ϊ5���ȼ�(RB��RS��Z��LS��LB)����5���ȼ��ֱ����������Ŀ��Ƕ���Ϣ(ƫ���ƫ��С����ƫ��ƫ��С��ƫ�Ҵ�)�����ϰ����˶�����td��Ϊ2���ȼ���L(����)��R(����)���ò�������Ǽ��������������ڸ����Ա���ģ�����ϵ��������� ��
��
 (7)
(7)
ʽ�У�xi������״̬�ռ�����Ԫ�أ� ��nΪ��������λ����miΪxi��ģ���ָ��������IJ��þ��κ���rect(��)��Ϊ�����Ⱥ�����
��nΪ��������λ����miΪxi��ģ���ָ��������IJ��þ��κ���rect(��)��Ϊ�����Ⱥ�����
��3���ÿ���ڵ����1��ģ����������ƥ��ģ�������ǰ���������ÿ���������Ӧ�Ȧ�j��
 (8)
(8)
ʽ�У�
 in��{1, 2,
in��{1, 2,  ,mn};
,mn};  ��
��
��4��Ľڵ������3�����ͬ��ʵ�ֹ�һ�����㣬��j��һ�����Ϊ
 (9)
(9)
ʽ�У� ��
��
��5��Ϊ����㣬����ѡ�ü�Ȩƽ����ȥģ�����������Ϊ�����˵�ת�ǿ�����w���ٶȿ�����v������
 (10)
(10)
�����������ϲ��ԣ��ں��ϰ����˶������жϲ��Ժ���Ŀ�����²��Եı����㷨������ͼ5��ʾ��
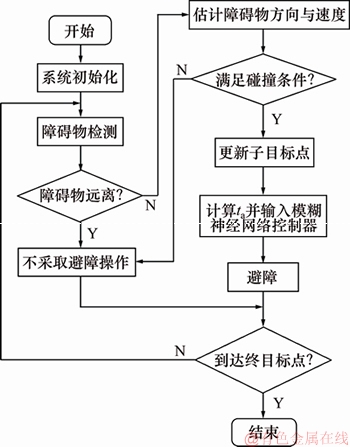
ͼ5����̬���������㷨����
Fig. 5��Algorithm of obstacle avoidance in dynamic environment
3 ���������
3.1������ƽ̨�����黷��
����ʹ��Turtlebot3 waffle��Ϊ�ƶ�ƽ̨������5·����������������ϰ�����룬�����������������Ƕ�Ϊ15�㡣5·����������̽���ƶ��������н�������135�㷶Χ�ڵ��ϰ���߽���Ϣ��̽�⾫��Ϊ0.3 cm��1%��Ϊ���ⳬ��������������ţ���̽���ϰ��������Ϣʱ������������������ѭ���������κν��ڵĴ���������ͬʱ������
Ϊ���ƶ������˾߱�λ����Ϣ�ĸ�֪�����������ƶ�ƽ̨����UWB�߾���ת������Ϊ�������㶨λ�Ĵ���������ȡ������λ������̬���ƶ���������ͼ6��ʾ��

ͼ6���ƶ�����������ƽ̨
Fig. 6��Mobile robot test platform
��������Ķ�̬�ϰ�����Ͽ����㷨��Ϊ����ƽ̨����ƶ��������������Ͽ���ϵͳ��ϵͳ�ṹ��ͼ7��ʾ���ÿ���ϵͳ��Ҫ������Ϣ�ɼ������ϲ��Ժ��˶�����3�����֡�

ͼ7������ϵͳ�ṹʾ��ͼ
Fig. 7��Structural diagram of control system
���黷��Ϊ��7.5 m����9.0 m�����ڴ����������ƶ���������ʼ������Ϊ(4 m��1 m)����ʼ�����Ϊ0�㣬Ŀ�������Ϊ(4 m��6 m)������������Ϊ��������������õ��ϰ��������Ϣ ��Ŀ��Ƕ�ta�Լ��ϰ�����˶������ж�td���Ի����˻�ȡ��UWBʵʱ����Ϊ���������꣬ÿ���˶��������1�λ���������õ������˵��˶��켣��
��Ŀ��Ƕ�ta�Լ��ϰ�����˶������ж�td���Ի����˻�ȡ��UWBʵʱ����Ϊ���������꣬ÿ���˶��������1�λ���������õ������˵��˶��켣��
��̬�ϰ���Ϊ�������ƶ������ˣ��ڻ��������й����У�����ϵͳ����ʽ(3)��ʽ(4)���ϰ����˶���������жϡ�
3.2������������
��Զ�̬�ϰ������ƶ��������˶��켣�ཻʱ���������˶��켣���жϽ����ͼ8��ʾ��

ͼ8����̬�ϰ�����������˶��켣�ཻ�жϽ��
Fig. 8��Predicting result of dynamic obstacles and robot trajectories in condition of intersection
��ͼ8���Կ���������̬�ϰ��������˶�ʱ�������˶������˶����ϰ�����������ȷ�жϲ��ɹ��ƿ����ƶ��ϰ������̬�ϰ��������˶�ʱ�����ܻ������ڶԶ�̬�ϰ����������ж�ʱ���������У��������˶�����2�����ڵ��жϽ�����жԱȣ�������2�����ڵ��жϽ����ͬ���������Ż�������Ӧ���ߣ�����ֻ��1�����ڳ������в���Ӱ������˵��˶��켣�������˳ɹ��ƿ����ϰ����̬�ϰ�����������˶��켣�ཻ��������ͼ9��ʾ��
ͼ9����̬�ϰ�����������˶��켣�ཻ������
Fig. 9��Experimental result of dynamic obstacles and robot trajectories in condition of intersection
��ͼ9��֪�����붯̬�ϰ����˶������ж�֮�����˿���ȷ�ж϶�̬�ϰ�����˶������Ա�����2�����ڵ��жϽ�����������ܳ��ֵĸ������ڵ��˶��������У���Ч�ƿ��ϰ��ʵ������ײ���ϣ����յ���ָ��Ŀ��㡣
������ƶ�������ƽ���˶���̬�ϰ���ʱ������ʽ(5)�Լ��Ƿ������Ŀ��㣬�������˶��켣���ٶ�������ͼ10��ʾ����ͼ10���Կ���������Ŀ�����²���ʱ�������˱���·�����̣����н��ٶ�ʼ�ձ��ָ��٣�������Ϊ������Ϊ�ķ��������١�����������ͼ11��ʾ��
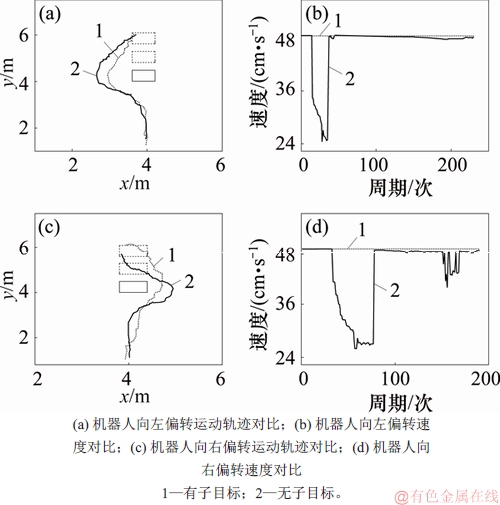
ͼ10���������˶��켣���ٶ�����
Fig. 10��Robot trajectories and velocity curves

ͼ11����̬�ϰ�����������˶��켣ƽ��������
Fig. 11��Experimental result of dynamic obstacles and robot trajectories in condition of parallel
������ƽ���н��ٶ����1��ʾ���ɱ�1���Կ���������������ƫʱ��������Ŀ�������£�������ƽ���н��ٶ�Ϊ47.36 cm/s����������Ŀ������ʱ��������ƽ���н��ٶ�Ϊ44.61 cm/s���ɼ���������Ŀ�������£�������ƽ���н��ٶ�����6.19%������������ƫʱ��������Ŀ�������£�������ƽ���н��ٶ�Ϊ47.16 cm/s����������Ŀ������ʱ��������ƽ���н��ٶ���42.20 cm/s���ɼ���������Ŀ�������£�������ƽ���н��ٶ�����11.75%��
��1��������ƽ���н��ٶ�
Table 1��Average moving speed of robot cm/s

4 ����
1) ���һ�ֶ�̬�ϰ�������㷨�����㷨������̬�ϰ����˶������жϲ��ԡ���Ŀ����²����Լ�ģ��������3�����֡�
2) ���������㷨��ƵĿ�����������δ֪��̬�������ж϶�̬�ϰ�����˶���������Ŀ���������������ϣ�������Ŀ�����²�����ȣ�������Ŀ�������£�������ƽ���н��ٶ�������11.75%����֤������ƿ���������Ч�ԺͿ����ԡ�
�ο����ף�
[1] HE Kunpeng, GAO Yanbin, SUN Hua. A fuzzy neural network based on T-S model for mobile robots to avoid obstacles[C]// International Conference on Intelligent Robotics and Applications. Berlin, Germany: Springer, 2008: 1127-1134.
[2] GUO Jinchao, GAO Yu, CUI Guangzhao. Path planning of mobile robot based on improved potential field[J]. Information Technology Journal, 2013, 12(11): 2188-2194.
[3] AHMED A A, ABDALLA T Y, ABED A A. Path planning of mobile robot by using modified optimized potential field method[J]. International Journal of Computer Applications, 2015, 113(4): 6-10.
[4] �λ�, �Զ���. ��̬�����»����Ƴ�ԭ���ı��Ϸ���[J]. ���пƼ���ѧѧ��(��Ȼ��ѧ��), 2006, 34(9): 39-41, 56.
DUAN Hua, ZHAO Dongbiao. Potential field-based obstacle avoidance algorithm for dynamic environment[J]. Journal of Huazhong University of Science and Technology(Nature Science Edition), 2006, 34(9): 39-41, 56.
[5] ULRICH I, BORENSTEIN J. VFH+: reliable obstacle avoidance for fast mobile robots[C]//IEEE International Conference on Robotics and Automation. Leuven, Belgium: IEEE, 1998: 1572-1577.
[6] ULRICH I, BORENSTEIN J. VFH/sup */: local obstacle avoidance with look-ahead verification[C]// IEEE International Conference on Robotics and Automation. San Francisco, USA: IEEE, 2000: 2505-2511.
[7] ZHANG Sushu, WU Min, CAO Weihua. An obstacle avoidance algorithm in local dynamic environments[J]. Computing Technology & Automation, 2003, 22(1):12-16.
[8] ZHU Yi, ZHANG Tao, SONG Jingyan, et al. A new method for mobile robots to avoid collision with moving obstacle[J]. Artificial Life and Robotics, 2012, 16(4): 507-510.
[9] CAI Wenbin, ZHU Qingbao, HU Jun. Path planning based on biphasic ant colony algorithm and fuzzy control in dynamic environment[C]//2010 Second International Conference on Intelligent Human-Machine Systems and Cybernetics. Nanjing, China: IEEE, 2010: 333-336.
[10] ������, ۳С��, ������, ��. ���ڸĽ���Ⱥ�㷨���ƶ������˶�̬·���滮����[J]. ����ѧ��, 2011, 39(5): 1220-1224.
LIU Chang'an, YAN Xiaohu, LIU Chunyang, et al. Dynamic path planning for mobile robot based on improved ant colony optimization algorithm[J]. Acta Electronica Sinica, 2011, 39(5): 1220-1224.
[11] ������, �����. �û���֪ʶ���Ŵ��㷨ʵ���ƶ�������·���滮[J]. ����ѧ��, 2006, 34(5): 911-914.
ZHOU Lanfeng, HONG Bingrong. A knowledge based genetic algorithm for path planning of a mobile robot[J]. Acta Electronica Sinica, 2006, 34(5): 911-914.
[12] �����, �Ź�Ӣ, ������, ��. ���ڶ�Ŀ���Ŵ��㷨��·���滮[J]. ����������ѧѧ��, 2005, 25(7): 613-616.
LIU Xuhong, ZHANG Guoying, LIU Yushu, et al. Path planning based on multi-objective genetic algorithm[J]. Journal of Beijing Institute of Technology, 2005, 25(7): 613-616.
[13] YANG X, MOALLEM M, PATEL R V. A layered goal-oriented fuzzy motion planning strategy for mobile robot navigation[J]. IEEE Transactions on Systems, Man and Cybernetics, Part B (Cybernetics), 2005, 35(6): 1214-1224.
[14] �ǿ���, ����Ԫ, �����, ��. �����˶�̬�����絼���㷨���о���ʵ��[J]. ����������Ӧ��, 2010, 27(1): 111-115.
QIAO Junfei, FAN Ruiyuan, HAN Honggui, et al. Research and realization of dynamic neural network navigation algorithm for mobile robot[J]. Control Theory & Applications, 2010, 27(1): 111-115.
[15] ZHU Anmin, YANG S X. Neurofuzzy-based approach to mobile robot navigation in unknown environments[J]. IEEE Transactions on Systems, Man and Cybernetics, Part C (Applications and Reviews), 2007, 37(4): 610-621.
[16] Ǯ��, �ΰ���, �»���, ��. ��������Ӧģ��������Ļ�����·���滮����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2012, 42(4): 637-642.
QIAN Kui, SONG Aiguo, ZHANG Huatao, et al. Path planning for mobile robot based on adaptive fuzzy neural network[J]. Journal of Southeast University(Natural Science Edition), 2012, 42(4): 637-642.
[17] ������, ������, ������. ����ģ���������������������������ջ�����ϵͳ���[J]. ������, 2018, 40(1): 16-23.
KONG Lingwen, LI Pengyong, DU Qiaoling. The closed-loop control system design of hexapod robot autonomous navigation based on fuzzy neural network[J]. Robot, 2018, 40(1): 16-23.
[18] ������, ������, ������, ��. ģ�����������������α����е�Ӧ��[J]. ���пƼ���ѧѧ��(��Ȼ��ѧ��), 2013, 41(5): 77-81.
JIA Songmin, GAO Liwen, FAN Jinhui, et al. Application of fuzzy neural networks in intelligentwheelchair's obstacles avoiding[J]. Journal of Huazhong University of Science and Technology(Natural Science Edition), 2013, 41(5): 77-81.
[19] �����, ������. ��ģ����Ԥ����Ƽ���MATLABʵ��[M].��3��.����: ���ӹ�ҵ������, 2013: 2627-265.
LI Guoyong,YANG Lijuan. Neural��Fuzzy��Predictive Control and Realization in MATLAB[M]. 3rd ed. Beijing: Publishing House of Electronics Industry, 2013: 262-265.
(�༭ �����)
�ո����ڣ� 2018 -11 -12; �����ڣ� 2018 -12 -18
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51675385)(Project(51675385) supported by the National Natural Science Foundation of China)
ͨ�����ߣ�Ф���ͣ���ʿ�����ڣ��������ֻ������븴�ӻ���ϵͳ�о���E-mail��xhxiao@whu.edu.cn

