双离合器混合动力系统瞬态工况的仿真
何建辉,杨林
(上海交通大学 机械与动力工程学院,上海,200240)
摘 要: 针对目前单轴并联式(ISG)混合动力系统转矩响应慢和能量回收效率低等不足,提出一套新型的混合动力总成方案。该方案采用较大功率的电动机,在发动机与电机间安装1个电控自动离合器,电机与变速器之间安装1个手动离合器。根据汽车动力学理论计算车辆在中国典型城市的道路动力需求,建立瞬态工况下双离合器ISG混合动力汽车的Simulink仿真模型,并针对汽车的瞬态加速工况,通过离合器来协调转矩的分配。仿真及实验结果表明:采用该方案改善了状态切换过程的平顺性,提高了瞬态过程中的转矩响应速度,缩短了加速耗时。
关键词:混合动力;双离合器;动力系统;瞬态;仿真
中图分类号:TK421.7 文献标志码:A 文章编号:1672-7207(2011)01-0073-07
Simulation of transient conditions on double
clutch hybrid power system
HE Jian-hui, YANG Lin
(School of Mechanical Engineering, Shanghai Jiaotong University, Shanghai 200240, China)
Abstract: Based on the fact that the single axis parallel hybrid systems in torque response is late and energy recovery efficiency is low, a set of new hybrid power scheme was proposed. This scheme adopted a higher power of the motor and an electric automatic clutch between the engine and motor, a manual clutch was fixed between motor and transmission. Based on the theory of vehicle dynamics in typical Chinese urban roads and so on, many kinds of needed motivations were calculated, and a simulink model of the double-clutche hybrid vehicle under the transient condition was established, and in the vehicle’s transient accelerate condition, coordinated torque was distributed through the clutch. Simulation and experimental results indicate that the new scheme improves state-transition processes smoothly, improves the transient process of the torque response speed, and shortens the accelerating time.
Key words: hybrid electric vehicle; double-clutch; power system; transient; simulation
随着化石燃料的日益枯竭,混合动力汽车作为目前比较现实的节能方式,越来越受到人们的关注[1-3]。而装备有起动发动一体电机(Integrated starter and generator, ISG)的混合动力系统具有结构简单、易实现等优点,成为混合动力未来的方向之一,但ISG混合动力汽车在制动能量回收和转矩响应速度方面还存在很多不足[4-5]。为了解决ISG混合动力系统的这些缺点,本文作者提出一套配有2个离合器的新型ISG混合动力总成方案。
1 动力系统结构及特点
设计了2个离合器:在柴油机和ISG电机之间布置自动离合器,在ISG电机和变速箱之间布置手动离合器。自动离合器采用电控方式,手动离合器采用摩擦片的机械方式,通过对自动前离合器的电控方式,可以实现混合动力车起动工况的冲击起动、制动过程中的较大能量回收等功能。采用单轴并联混合动力方案,集成柴油机、ISG电机和双离合器等部件,选用锂离子蓄电池作为能量储存器,使柴油机实现起/停控制、工作点集中在经济区,回收部分制动能量。双离合器混合动力系统结构如图1所示。
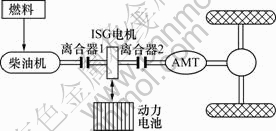
图1 双离合器混合动力系统结构示意图
Fig.1 Double-clutch hybrid system structure
通过对柴油机、ISG电机、蓄电池、离合器等零部件的机械和电控系统的优化匹配,可以实现混合动力客车的各个功能模块。
1.1 快速起动及怠速停车
当车辆起步时,ISG电机在短时间内(通常为0.1~0.2 s)带动柴油机快速达到喷油转速(即工作转速700 r/min),柴油机开始进行燃油喷射,此时,柴油机处于高效区间内,转速高,惯性力大,需要的加浓燃油量比较小,燃烧室内混合气温度较高,更容易着火,排放量也提高。当汽车需要突然停车时(例如遇到红灯),柴油机会切断供油,使柴油机停止运行,同时,ISG电机也停止工作。需要起步时,ISG电机在短时间内完成起步工况[5]。
1.2 加速和上坡助力
当汽车加速或上坡时,转矩需求升高,此时,由ISG电机提供辅助功率,使柴油机稳定在高效率工况。由于电机的转矩输出响应快,瞬间提供的转矩大,非常适合于城市频繁加速工况,通过电机提供的瞬时转矩,可以提高汽车瞬态工况的动力性能[6-7]。
1.3 行车充电
在行驶过程中,若行驶转矩需求不高且SOC(State of charge)值较低,则ISG电机反转作电机使用,这样,可以保证柴油机在高效低能耗区间运行的同时,充分利用多余的能量,并且存储在电池里的能量可以作为动力源进一步降低燃油消耗[8]。
1.4 制动能量回收
当汽车处于减速或制动工况时,根据当前车速、司机油门踏板以及刹车踏板信号,判断整车处于减速制动工况,柴油机的电控离合器断开,ISG电机发电对动力电池进行充电,实现回收制动[9-12]。
2 离合器仿真模型
离合器模块主要功能是根据行驶工况模式控制离合器的输出状态,协调档位控制。模型中考虑了机械损失和转动惯量损失等。离合器有3 种状态:分离、半离合(摩擦滑动)和接合。在分离状态下,动力传动被切断,主动盘(输入)和从动盘(输出)的转矩与转速没有关系。在接合状态下,转速和转矩等值传递[13]。
2.1 离合器结合过程动力学模型
在不考虑液压系统的情况下,离合器的结合过程可以简化成如图2所示的模型[14],由此可得离合器主、从动盘的动力学方程。
主动盘: (1)
(1)
从动盘: (2)
(2)
式中:Ted为柴油机的动态输出转矩,N・m;Tcl为离合器传递的转矩,N・m;Tr为作用在从动盘上的负载转矩,N・m;Be为柴油机黏性阻尼系数;Bc为从动件等效阻尼系数;Ie 为主动盘(柴油机和飞轮)转动惯量,kg・m2;Ic为离合器从动盘的转动惯量,它包括变速器、前后车轮以及汽车平移质量等效到离合器输出轴(即变速器输入轴)上的转动惯量,kg・m2;ωe和ωc分别为离合器主、从动盘的角速度,rad/s; 和
和 分别为离合器主、从动盘角速度的变化率。
分别为离合器主、从动盘角速度的变化率。

图2 离合器结合过程示意图
Fig.2 Schematic drawing of clutch engaging process
根据汽车动力学方程,离合器从动盘的转动惯量可由下式确定:
 (3)
(3)
其中:JMT为变速箱的转动惯量,kg・m2;M为整车装
备质量,kg;rw为车轮滚动半径,m; 为前后
为前后
车轮的转动惯量,kg・m2;i0为主减速比;iMT为变速箱当前档位的变速比。
2.2 离合器的控制模型
离合器接合控制模块涉及的状态和参数主要有:换档状态、柴油机工作状态、离合器输入转速、离合器输入转矩等,这些状态和参数决定离合器的状态。当变速箱正在换档或者转矩输入小于0 N・m,并且柴油机转速小于怠速或者当柴油机停机时,离合器处于脱离状态;当转矩输入大于0 N・m,柴油机转速小于起动转速,并且离合器前1个状态不是接触时,离合器处于滑转状态;在其他条件下,离合器处于接合状 态[15]。图3所示为离合器接合控制模型。
对于正向驱动转矩,需求的分配要复杂得多。根据整车转矩的需求,ISG电机和柴油机在各自的工作转矩有不同的组合方式;因此,要建立控制策略目标函数确定电机和柴油机的分配原则,要综合考虑燃油消耗、排放、蓄电池的电压状态[16]。制动转矩控制策略原则是:根据ISG电机、蓄电池、制动部件以及车辆部件的性能限制,ISG电机最大限度地回收制动能量,制动部件提供其余的制动转矩。这种方式保证了最大限度地回收制动能量[17]。
负向的刹车踏板需求转矩 为:
为:

正向的加速踏板需求转矩 为:
为:

其中:Tengine,Tmotor和Tbrake分别为发动机输出转矩、电机制动转矩和刹车制动转矩。
混合动力车总体控制目标是尽可能地提高混合动力整车的燃油经济性和降低污染物的排放。图4所示为转矩分配控制策略的基本原则[17]。制定混合动力控制策略遵循原则为:
(1) 避免柴油机怠速,减少柴油机在低速和高转速等经济性和排放性较差的区域工作,使柴油机尽可能在较高转速和较大负荷的高效区域内工作。
(2) 避免柴油机频繁起动和关机,尽可能降低柴油机起步阶段的污染物排放量。
(3) 由于与柴油机相比,ISG电机的高效区范围宽,所以,要在保证柴油机高效运转的前提下,使ISG电机尽可能工作在高效率区域。
(4) 维持蓄电池电压及SOC值在一定范围内,避免蓄电池频繁地在电流下充放电。
(5) 通过优化柴油机和ISG电机的转矩分配,使柴油机尽可能在稳态工况下工作。ISG电机提供瞬态工况的转矩补偿,减少柴油机瞬态工况的燃油消耗,降低污染物的排放。
(6) 在整车制动能量回收阶段保证安全制动的情况下,尽可能多地回收能量。

图3 离合器接合控制模型
Fig.3 Clutch engaging control model

图4 转矩分配控制策略的基本原则
Fig.4 Basic principles of torque distribution control strategy
3 双离合器混合动力的运行状态
柴油机按照转速和转矩对工作区域进行划分,主要包括:
(1) 柴油机停机区域。即处于怠速以下在各个转速范围内低负荷工况,该区域柴油机燃烧效率低,燃油消耗高,污染物排放大,因此,柴油机处于不工作状态。
(2) 柴油机高效率工作区域。在该区域,柴油机燃烧效率高,经济性好。
(3) 低速小负荷工况。在该工况,通过蓄电池充电,提高柴油机运行工况,同时,尽可能让柴油机处于稳态工况,瞬态转矩让电机进行补偿。
(4) 高速大负荷工况。ISG电机按照最大转矩助力,不使柴油机工作在外特性工况,减少柴油机的燃油过浓喷射,降低污染物的排放[18]。
ISG电机作为汽车的辅助动力源。该系统可以实现柴油机自动起停、电动助力、高效大功率电能输出和再生制动能量回收等功能[19]。此混合动力方案可以提高整车的燃油效率和排放性能,又可提高整车的动力性能。ISG电机还可以作为有源飞轮实现柴油机曲轴的主动减震。
混合动力总成系统的零部件涉及面广,既有原型车的一套完整零部件系统,又有现代电动车所具备的电池系统、电机系统等,同时,要对原车的刹车系统、空调系统进行结构改进,整个机械、电器系统更加庞大,因此,对其控制较复杂。为了更好地确定和优化各零部件参数,有必要对各个零部件进行结构选型和动力计算,从而为零部件的选型、标定和优化打好基础[20]。混合动力系统各个零部件参数选择与匹配是否合理直接影响整车性能的发挥。参数匹配的原则是:针对给定的车型、目标工况和基本控制策略,在保证车辆动力性要求的前提下,以燃油经济性为主要目标进行设计。图5所示为柴油机和ISG电机外特性转矩合成图。

图5 柴油机和电机外特性转矩合成图
Fig.5 Motion external characteristics torque
4 瞬态加速工况控制策略及仿真
共轨燃油系统的工作流程如图6所示,其中:n为发动机转速;tfuel,teng和tcool分别为燃油温度、发动机温度和冷却温度;mair为进气质量。对于涡轮增压柴油机,当柴油机处于加速工况时,由于废气涡轮增压器叶轮的惯性造成进气存在着明显的滞后,因 此,为了保证加速过程中的燃油经济性能和排放性 能,在加速过程中就必须根据进气量对柴油机油量进行限制。

图6 共轨燃油系统的工作流程图
Fig.6 Flow chart of common rail fuel system
4.1 瞬态工况转矩协调控制策略
柴油机在瞬态工况时, ,因此,需ISG补偿辅助。需求转矩可用下式表示:
,因此,需ISG补偿辅助。需求转矩可用下式表示:

式中: 为驱动需求转矩;
为驱动需求转矩; 为柴油机实时转矩;
为柴油机实时转矩; 为电机的补偿转矩。
为电机的补偿转矩。
4.1.1 驱动需求转矩的识别
反映了驾驶员对车辆驱动转矩的需求。在车辆行驶过程中,驾驶员的需求转矩由油门位置和转速根据驾驶特性脉谱图来确定。
4.1.2 确定电机目标转矩
在瞬态过程中,电机的目标转矩用下式表示:
(1) 当 (其中,
(其中, 为电机的最大输出转矩),即电机由于功率限制期望转矩超过了电机的驱动转矩时,电机无法提供期望驱动转矩,此时,电机的目标转矩为:
为电机的最大输出转矩),即电机由于功率限制期望转矩超过了电机的驱动转矩时,电机无法提供期望驱动转矩,此时,电机的目标转矩为:

(2) 当 时(其中,
时(其中, 为电机最小输出转矩),电机的目标转矩为:
为电机最小输出转矩),电机的目标转矩为:

(3) 当 时,电机目标转矩为:
时,电机目标转矩为:

随着时间t逐渐增大, 会逐渐变小,直到满足边界条件
会逐渐变小,直到满足边界条件 时(
时( ),电机便停止转矩补偿。
),电机便停止转矩补偿。
4.2 瞬态工况转矩协调控制策略仿真
由上述分析可知:加速转矩补偿控制策略的核心是确定电机的目标转矩,即


在Matlab/Simulink环境中,建立的瞬态工况转矩协调控制策略仿真模型如图7所示。模型中的信号发生器用于模拟油门位置的突变过程,阶跃信号发生器ML用于模拟外界负载的变化。加速仿真时初始值的设置如下:初始转速为1 100 r/min,外界负载ML转矩为377 N・m,油门开度为40%。

图7 瞬态工况控制策略仿真流程
Fig.7 Simulation procedure of transient operations
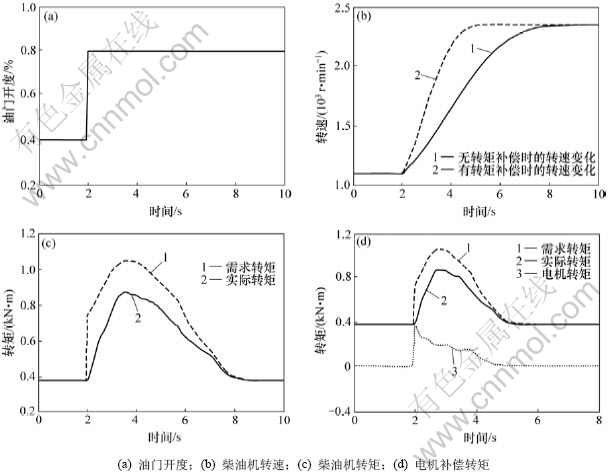
图8 混合动力系统的仿真结果
Fig.8 Simulation results of hybrid power train
仿真时,油门开度变化如图8(a)所示。可见:当仿真时间到2 s时,油门开度由40%突变为80%,并保持到仿真结束。图8(b)所示为有加速转矩补偿和无加速转矩补偿时的柴油机转速仿真结果,可见:在外界负载固定为377 N・m,仿真时间为2 s时,由于油门开度由40%突变为80%,此时柴油机开始从1 100 r/min加速,并最终稳定在2 338 r/min;没有加速转矩补偿时,当仿真时间进行到8 s时达到稳定转速;有加速转矩补偿时,仿真时间为5 s时达到稳定转速,缩短了加速时间。图8(c)所示反映了加速过程中柴油机转矩需求和实际转矩的仿真结果(无电机转矩补偿)。从图8(c)可见:在仿真时间为2 s时,由于油门突变,转矩需求也相应从377 N・m突升为1 042 N・m,加速过程中实际转矩小于转矩需求;当仿真时间为8 s时,柴油机实际转矩满足转矩需求。图8(d)所示为电机补偿转矩的仿真结果。从8(d)可见:由于电机转矩的补偿,使得柴油机实际转矩与电机转矩之和满足了转矩需求,缩短了加速时间。
5 结论
(1) 分析了双离合器混合动力系统中柴油机模型中各种影响参数的变化规律,结合ISG电机模型和蓄电池模型,建立了双离合器混合动力动力系统模型。
(2) 通过分析双离合器混合动力系统在稳态和瞬态过程中转矩控制策略的工作原理,开发了双离合器混合动力系统的转矩控制策略,结合柴油机实际工作过程的转矩需求,对ISG电机的转矩进行了动力匹配。
(3) 动态控制策略有效地减小了柴油机和ISG电机转矩之和的波动,可以实现无转矩波动的状态切换过程,改善了状态切换过程中动力传递的平顺性,缩短了提速时间。
参考文献:
[1] 刘剑锋, 刘友梅, 桂卫华, 等. 基于模糊预测控制的机车知道控制方法[J]. 中南大学学报: 自然科学版, 2009, 40(5): 1329-1335.
LIU Jian-feng, LIU You-mei, GUI Wei-hua. Locomotive brake control method based on fuzzy predictive control[J]. Journal of Central South University: Science and Technology, 2009, 40(5): 1329-1335.
[2] ZOU Yuan, SUN Feng-chun, HE Hong-wen. Global control simulation of electrical vehicle based on finite sate machine theory[J]. Journal of Beijing Institute Technology, 2004, 13(2): 25-29.
[3] 黄妙华, 喻厚宇. 影响并联混合动力电动汽车发动机在高效区工作的因素[J]. 汽车工程, 2005, 27(1): 11-15.
HUANG Miao-hua, YU Hou-yu. Factors making engine works within the efficient operation region of parallel hybrid electric vehicle[J]. Automotive Engineering, 2005, 27(1): 11-15.
[4] 张欣, 郝小建, 李从心, 等.并联式混合动力电动汽车动力总成控制策略的仿真研究[J]. 汽车工程, 2005, 27(2): 141-145.
ZHANG Xin, HAO Xiao-jian, LI Cong-xin, et al. A simulation study on the power train control strategy for a parallel hybrid electric vehicle[J]. Automotive Engineering, 2005, 27(2): 141-145.
[5] Henriksen S J, Betz R E, Cook B J. Digital hardware implementation of a current controller for IM variable-speed drives[J]. IEEE Trans on Industrial Application, 1999, 35(5): 1297-1316.
[6] Yoon H J, Lee S J. An optimized control strategy for parallel hybrid electric vehicle[J]. SAE, Technical Paper, 2003, 43(3): 1329-1347.
[7] Chan C C, QIANG Sun. Control and operation of a new 8/6-pole doubly salient permanent-magnet motor drive[J]. IEEE Transactions Industry, 2003, 39(3): 371-378.
[8] Andraka R. A survey of CORDIC algorithms for FPGA based computers[C]//Proc of ACM/SIGDA Sixth International Symposium on FPGAs. Monterrey, CA, 1998: 191-200.
[9] van der Broeck H W, Skudelny H C, Stanke G V. Analysis and realization of a pulse width modulator based on voltage space vectors[J]. IEEE Trans on Industrial Applications, 1988, 24(1): 989-1003.
[10] 杨为琛. 混合电动公交车总体匹配、仿真及其控制系统研究[D]. 北京: 北京理工大学汽车与车辆工程学院, 2002: 20-50.
YANG Wei-chen. The general matching simulation of the HEV bus and control system research[D]. Beijing: Beijing Institute of Technology. Machinery and Vehicle Engineering Institute, 2002: 20-50.
[11] 谢辉, 宋小武, 周能辉. 轻度混合动力系统控制模式分层决策及能量管理策略的研究[J]. 内燃机报, 2005, 23(2): 155-161.
XIE Hui. SONG Xiao-wu, ZHOU Neng-hui. Hierarchical control mode and energy management strategy for a mild hybrid electrical vehicle[J]. Transactions of CSICE, 2005, 23(2): 155-161.
[12] 冯能莲, 郑慕侨, 马彪. 动力换档离合器充/放油特性仿真研究[J]. 农业工程学报, 2001, 17(2): 68-71.
FENG Neng-lian, ZHENG Mu-qiao, MA Biao. Performance simulation of power shift clutch during charge/discharge processes[J]. Agricultural Engineering Journal, 2001, 17(2): 68-71.
[13] 李国菲, 林逸, 何洪文. ISG混合动力电动汽车控制策略仿真研究[J]. 计算机仿真, 2009, 26(8): 253-257.
LI Guo-fei, LIN Yi, HE Hong-wen. Modeling and simulation of control strategy of ISG hybrid system[J]. Computer Simulation, 2009, 26(8): 253-257.
[14] 周雅夫, 连静, 李启迪. ISG混合动力电动汽车控制策略研究[J]. 仪器仪表学报, 2009, 30(6): 1164-1168.
ZHOU Ya-fu, LIAN Jing, LI Qi-di. Control strategy of integrated starter/generator hybrid electric vehicle[J]. Chinese Journal of Scientific Instrument, 2009, 30(6): 1164-1168.
[15] 袁银男, 王忠, 梁磊, 等. ISG混合动力汽车加速扭矩补偿策略与仿真[J]. 车用发动机, 2009, 17(1): 27-30.
YUAN Yin-nan, WANG Zhong, LIANG Lei, et al. Acceleration torque compensation strategy and simulation of ISG hybrid electric vehicle[J]. Vehicle Engine, 2009, 17(1): 27-30.
[16] 王峰, 袁银男, 王忠. ISG混合动力汽车控制策略研究及仿真[J]. 机械设计与制造, 2009, 21(1): 203-205.
WANG Feng, YUAN Yin-nan, WANG Zhong. Control strategy research and simulation for ISG parallel hybrid electric vehicle[J]. Machinery Design & Manufacture, 2009, 21(1): 203-205.
[17] 袁银男, 王忠, 钱恒荣, 等. ISG混合动力汽车整车控制器的设计[J]. 汽车工程, 2009, 31(7): 601-605.
YUAN Yin-nan, WANG Zhong, QIAN Heng-rong, et al. Design of vehicle control unit for ISG hybrid electric vehicle[J]. Automotive Engineering, 2009, 31(7): 601-605.
[18] 杨阳, 杨文辉, 杨亚联, 等. ISG混合动力再生制动系统压力协调控制策略[J]. 重庆大学学报, 2009, 32(5): 493-498.
YANG Yang, YANG Wen-hui, YANG Ya-lian, et al. Coordinated pressure control of a regenerative braking system based on a hybrid electric vehicle with an integrated starter and generator[J]. Journal of Chongqing University, 2009, 32(5): 493-498.
[19] 杨阳, 刘松, 秦大同, 等. ISG型混合动力汽车制动系统仿真分析[J]. 重庆大学学报, 2009, 32(7): 752-756.
YANG Yang, LIU Song, QIN Da-tong, et al. Simulation analysis on braking system of hybrid vehicle with ISG[J]. Journal of Chongqing University, 2009, 32(7): 752-756.
[20] 周美兰, 张宇, 王旭东. 单轴并联式混合动力汽车动力总成建模与仿真[J]. 电机与控制学报, 2009, 13(1): 36-40.
ZHOU Mei-lan, ZHANG Yu, WANG Xu-dong. Modeling and simulation of power assembly for single-axle parallel hybrid electric vehicles[J]. Electric Machines and Control, 2009, 13(1): 36-40.
(编辑 陈灿华)
收稿日期:2010-07-21;修回日期:2010-09-27
基金项目:国家重点基础研究发展计划(“973”计划)项目(2007CB209707)
通信作者:何建辉(1978-),男,江西东乡人,博士研究生,从事混合动力总成、电动汽车系统集成及控制研究;电话:15802196152;E-mail: 15802196152@163.com

