
DOI: 10.11817/j.issn.1672-7207.2015.08.028
��������Ӧ������Ƶı��μ���˲��㷨
������1, 2����ӭ��1��лѩ÷1���ֶ���1
(1. ���ϴ�ѧ �����ѧ����Ϣ����ѧԺ, ���� ��ɳ��410083��
2. ���ϳ���ѧԺ �������湤��ѧԺ, ���� ������413000)
ժ Ҫ��
�IJв��������������̬�ֲ������ʣ����1���˲��Ƿ��쳣�ļ�����鷽�����ж϶�̬ģ�����۲�ֲ�Ա��μ���˲����Ӱ�졣�о�������������˲������쳣ʱ��ͨ���������Ŷȵļ�����飬ȷ������Ӧ�������������ϴ��Ԥ����Ϣ���Ӷ��Ϻõ�����ģ������Ӱ�죻��������Ӧ�����˲�������μ�����ݴ���������ƽ��۲���Ϣ��Ԥ����Ϣ�Ĺ������⣬��ͨ��ʵ����֤�㷨����Ч�Ժ������ԡ�
�ؼ��ʣ�
����Ӧ�˲�������Ӧ���������Ŷ������������
��ͼ����ţ�P228.4 ���ױ�־�룺A ���±�ţ�1672-7207(2015)08-2957-05
Filter algorithm for slope monitoring with design of adaptive factor
TANG Zhengqi1, 2, SONG Yingchun1, XIE Xuemei1, LIN Dongfang1
(1. School of Geosciences and Info-Physics, Central South University, Changsha 410083, China;
2. School of Municipal and Surveying Engineering, Hunan City University, Yiyang 413000, China)
Abstract: Based on the statistical property that residual vectors should be normally distributed, a hypothesis test was proposed whether there is an exception in filter to control the influence of dynamic model errors and great error in observation on the status parameter estimation. The results show that when there is an exception in filter, an adaptive factor can be determined by means of a hypothesis test with a given confidence level, which can adjust forecast information with big error and resist the influence of modeling error. A robustly adaptive Kalman filter algorithm was given to solve the overall balance contribution between observations and forecasts in the deformation monitoring data processing. Then, the validity and excellent of the algorithm are verified through a example of deformation monitoring.
Key words: adaptive filtering; adaptive factor; confidence degree; hypothesis test
�������͵����������ӣ����ֶ����ԣ�������ʵʱ��̬���μ�����ݴ��������Ķ����[1-7]������Ӧ�����˲����п��ƹ۲��쳣��״̬��Ϣ�쳣������[8]���ڱ��μ������ݴ����У�Ϊ���ܹ�ƽ���ѧģ����Ϣ��۲���Ϣ��Ȩ���Լ����ƶ���ѧģ������״̬�������Ӱ�죬����Ӧ�����˲��������1�������Ҽ����������Ӧ����[1, 8]��������ƽ��۲���Ϣ��Ԥ����Ϣ��״̬��ֵ�Ĺ��ף���Ҫ������2�����棺һ����ƽ��۲���Ϣ��Ԥ����Ϣ�������Ĺ��ף���һ��������ƽ��۲���Ϣ��Ԥ����Ϣ�Ĺ��ס�ǰһ��ƽ��������Ĺ�����Ҫ�ɿ���ȼ�Ȩ��ʵ�֣��翹��Kalman�˲�����һ��ƽ���ʵ�ַ�����3�֣�1) �������µĹ۲�в��״̬�в����߹��ƹ۲���Ϣ��Ԥ����Ϣ��Э�������[9-10]��2) ��������Ӧ���Ӵ�������ƽ��۲���Ϣ��Ԥ����Ϣ��״̬������ֵ�Ĺ���[11-12]��3) ������Э����������߹��ƺ�����Ӧ��������[13-14]��Ŀǰ�ѹ���������͵�����Ӧ���Ӻ����������κ��������κ�����ָ������[15]����״̬�����������ֱ����ڲ�ͬ���͵IJ���ʱ���ж������� ��[12]�Ͳ�����ѡȨ�˲�[16]�ȷ�������������Ӧ����[17]�ĺ�����Ӧ��ʹ������Ӧ�˲���������ͳ��������״̬������ֵ��Э������״̬����Ԥ��ֵ��Э���Լ��в�����(��Ϣ����)Э������ʵ�ʹ۲�ֵ��ͳ������һ�¡�������֪��ʵ��������״̬������ֵ�ڶ�̬����������Ӧ�IJο�ֵ���ԱȽϣ�״̬������ʵ��ͳ������ͨ������ã�����ȷ������Ӧ���ӷdz����ӡ�Ȼ�����ڱ�����£��˲�Ӧ����ijЩ�������ԡ����۲�ֵ�ɿ�ʱ��������������Ӧ��۲�ֵ��Ϣ�ƥ�䣬���������˲��쳣���˲����������Կ����òв��������������̻������˲�ģ�ͺ��������Զ���ȷʱ���в�����������̬�ֲ����ɴ˿��Խ���һ��ͳ�Ƽ�������������˲��Ƿ����쳣���ڸ�������ˮƽ���£�ͨ�����������δ�����˲��쳣������˲�������Ӧ�ġ���������Ӧ���һ���ļ���ˮƽ�����ԣ����Ц�Ϊ����Ӧˮƽ��1-��Ϊ����Ӧ�����Ŷȡ����������о��ڸ�������ˮƽ���£��������Ӧ������ƽ���ѧģ����Ϣ��۲���Ϣ��Ȩ���Լ����ƶ���ѧģ������״̬�������Ӱ�죬�ڴ˻����Ϲ���������ŶȵĿ�������Ӧ�˲��㷨��
1 ����Ӧ�����˲�ԭ��
�ڱ��μ����˲�ģ���У�Kalman�˲�������ɢ��ģ���������������Ի���ʽΪ[1]��
 (1)
(1)
 (2)
(2)
ʽ�У�LkΪm��1ά�۲�������AkΪm��nά��ƾ���Xk��Xk-1�ֱ�Ϊ��k��k-1��Ԫ��n��1ά״̬��������k,k-1Ϊn��nά״̬ת�ƾ���ek��Э�������Ϊ ��n��1ά�۲�����������Wk��Э�������Ϊ
��n��1ά�۲�����������Wk��Э�������Ϊ ��n��1ά״̬����������ek��Wk����أ�������
��n��1ά״̬����������ek��Wk����أ�������
 ��
�� (3)
(3)

 (4)
(4)
��ʽ(2)�ɵ�״̬����������Ԥ��ֵ ����Э�������
����Э������� Ϊ
Ϊ
 (5)
(5)
 (6)
(6)
ʽ�У� Ϊ��k-1��Ԫ��λ�ú��ٶȲ���������ֵ����۲���Ϣ��״̬Ԥ����Ϣ�����̿�дΪ
Ϊ��k-1��Ԫ��λ�ú��ٶȲ���������ֵ����۲���Ϣ��״̬Ԥ����Ϣ�����̿�дΪ
 ��
�� (7)
(7)
 ��
�� (8)
(8)
���У�VkΪ�۲�в������� Ϊ��k��Ԫ��λ�ú��ٶȲ�����ֵ��PkΪ�۲�Ȩ����
Ϊ��k��Ԫ��λ�ú��ٶȲ�����ֵ��PkΪ�۲�Ȩ���� ΪԤ��в�������
ΪԤ��в������� ΪԤ����Ϣ��Ȩ����
ΪԤ����Ϣ��Ȩ����
����Ӧ�����˲�����ԭ��Ϊ
 (9)
(9)
ʽ�У� ΪLk�ĵȼ�Ȩ����
ΪLk�ĵȼ�Ȩ���� Ϊ����Ӧ���Ӿ�������Ӧ�����˲��⼰��Э�������ɱ�ʾΪ
Ϊ����Ӧ���Ӿ�������Ӧ�����˲��⼰��Э�������ɱ�ʾΪ
 (10)
(10)
 (11)
(11)
2 ����Ӧ�������
��tk��Ԫ�۲���ϢLk�ɿ�ʱ������Ӧ��Ԥ��в�
 (12)
(12)
��ӳ�˶���ѧģ�͵����ӷ���(12)��Э�������Ĵ����ɿ��Եõ�Ԥ��в������Э������
 (13)
(13)
������Ӧ�˲������£�������ѧģ�����ϴ���״̬Ԥ��������Ȩ���� Ӧ�ü�С����Ӧ�ñ��
Ӧ�ü�С����Ӧ�ñ�� (0����k��1)����Ӧ�أ���Э�������
(0����k��1)����Ӧ�أ���Э������� Ӧ�ñ��
Ӧ�ñ�� ��ģ��Ԥ��״̬����
��ģ��Ԥ��״̬���� ��Э����������[2]������Ԫ tk-1�˲�������������Ӧ����
��Э����������[2]������Ԫ tk-1�˲�������������Ӧ���� =1��
=1��
 (14)
(14)
����Ԫtk-1�˲��쳣��������Ӧ����ӦС��1����ʱ��
 (15)
(15)
���ǣ���������
 (16)
(16)
�� �������ɶ�Ϊm��
�������ɶ�Ϊm�� �ֲ�(���У�mΪ�۲�����ά��)����
�ֲ�(���У�mΪ�۲�����ά��)���� �������¼�����
�������¼����� ʱ���˲���������
ʱ���˲��������� ʱ���˲��쳣�����У�
ʱ���˲��쳣�����У� Ϊ��������ˮƽ
Ϊ��������ˮƽ ���ֲ����в�õ�����ֵ��
���ֲ����в�õ�����ֵ��
��ͨ���������δ�����쳣������˲�������Ӧ�ġ���������Ӧ�����һ������ˮƽ���Եġ�����Ӧ�˲�����Ӧ�ڶ���ѧģ�����ϴ�ʱ�������á������˲������У����ڶ���ѧģ���������������Ӧ�����������ˮƽ��Χ�ڣ��ʲ��ؽ�������Ӧ���ڣ���ʱ��Ӧ������Ӧ����Ϊ1������tk-1ʱ�̷����˲��쳣��������һ��ʱ��tk��������Ӧ���ӽ��е��ڡ��� ����
���� ��ʱ��tk�йء����˲�����ʱ��Ӧ��
��ʱ��tk�йء����˲�����ʱ��Ӧ�� ����tk-1ʱ���˲�Ϊ�쳣����
����tk-1ʱ���˲�Ϊ�쳣���� Ӧ����Ϊ
Ӧ����Ϊ �������ĺ��������Ӧ���˲������ǣ����������˲�������Ӧˮƽ�£�Ӧ��
�������ĺ��������Ӧ���˲������ǣ����������˲�������Ӧˮƽ�£�Ӧ�� ����
����
 (17)
(17)
��ʽ(17)��Ϊ����Ӧ���ӵ�һ��Լ����Ϊ�˽��н�һ���Ľ�����
 ,
,
 (18)
(18)
��Sk��Uk��������������ˣ��������Ⱦ���Ckʹ

 (19)
(19)
���У� Ϊ
Ϊ �ĸ�����ʽ(18)����
�ĸ�����ʽ(18)����

�� ������
������
 (20)
(20)
����ʽ(20)�� ��Ψһ������
��Ψһ������ Ϊ�ĵ����ݼ��������ش���ʹ��
Ϊ�ĵ����ݼ��������ش���ʹ��
 ��
�� (21)
(21)
ʽ(21)��ʾ���� ����
���� ����ʱ����tkʱ�̲���������Ӧ�˲����������������ʾtk-1ʱ�̾����û�з����˲��쳣����
����ʱ����tkʱ�̲���������Ӧ�˲����������������ʾtk-1ʱ�̾����û�з����˲��쳣���� ʱ��
ʱ�� ����ʾtk-1ʱ�̼��˲��쳣��Ҫ���˲���������Ӧ����������Ӧ����Ϊ
����ʾtk-1ʱ�̼��˲��쳣��Ҫ���˲���������Ӧ����������Ӧ����Ϊ �������ɼ����˲��쳣��С�ȣ�����ʹ�˲�����Ӧ������ѡ�������Ӧ����ʹ������Ӧ�˲������Ŷȱ�����
�������ɼ����˲��쳣��С�ȣ�����ʹ�˲�����Ӧ������ѡ�������Ӧ����ʹ������Ӧ�˲������Ŷȱ����� ��ˮƽ�ϡ�
��ˮƽ�ϡ�
3 ���μ��ʵ���������
�Ժ���ij���ٹ�·���¼��Ϊ��[1]���ñ����Ѳ��ÿ������д��Σ��ڿ����ϲ���۲�㣬�۲���άλ�ơ�����2̨GPS���ջ�������̬ģʽ�۲⣬������Ϊ15 s������ÿ3 h����1�ν�������۲�6�¡����ڹ۲��ڼ���1̨GPS���ջ�ʱ��ص������㣬����ijЩʱ��εĹ۲����ݳ���һЩ�쳣����ˣ�λ�Ƶļ�������ʵ�ʲ���������ͨ���������˲��Ϳ�������Ӧ�˲������쳣�ı��¹۲����ݽ��д�����Ȼ�����������ջ��ļ�������бȽϣ�������������������2�ּ��㷽����
����1�����ñ��������˲����㡣
����2����������Ӧ�����˲�(ʽ(10))���м��㣬����Ӧ���Ӱ���ʽ(21)���㣬�������ŶȦ�=0.10��
����2�ַ�������������߷ֱ���ͼ1��ͼ2��ʾ����ͼ1��ͼ2���Կ�����
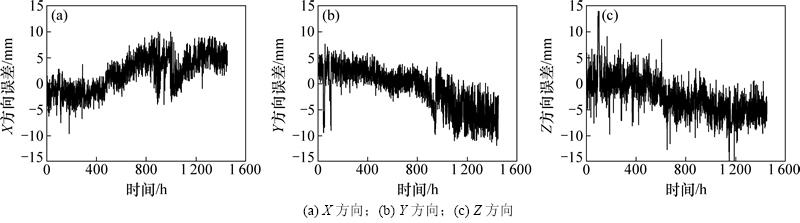
ͼ1 ����1������������
Fig. 1 Error curves of Scheme 1

ͼ2 ����2������������
Fig. 2 Error curves of Scheme 2
1) ���ڹ۲�����ϵ��¹۲�����쳣�����÷���1�ı��������˲�����״̬����������õ��α�λ�Ƶ��������(��ͼ1)�������˽ϴ�ƫ���˵���쳣�۲�Ա��Ŀ������˲��нϴ�Ӱ�졣
2) �ڷ���2�У���Ϊ����������Ӧ�����˲������α�������˲����㾫�Ⱦ��нϴ����(��ͼ2)����������Ӧ�������˵������ã��Ϻõ�ƽ���˵�������ģ����Ϣ�۲���Ϣ���α�������ƵĹ��ס�Ȼ�������ڹ۲Ȿ�������ǿɿ��ģ�Ҫ��ȫ�����۲�Ƚ����ѡ�ͼ2�У�����һЩ��С�Ķ�����Ȼ������
3) �Աȷ���1�ͷ���2��������߿ɼ������ڿ�������Ӧ�˲��㷨������Ч��У����۲��쳣���µ�һЩ��������״ֵ̬������2���˲����������С�����ϱ��ι۲�ʵ�����Ρ�
4 ����
1) Ϊ�˷���ģ������Ӱ�죬����1��������飬�ڸ���������Ӧˮƽ�£�����˲��Ƿ�����쳣��
2) ������˲����쳣����������µ�������Ӧ���ӣ����õ��������ϴ��Ԥ����Ϣ���Ӷ���Ч������ģ������Ӱ�졣
3) �ڱ��μ�����ݴ����У����һ�ֻ��ڼ���������������Ӧ����ȷ�������Խ��п�������Ӧ��ƽ���ѧģ����Ϣ��۲���Ϣ��Ȩ�ȣ������ƶ���ѧģ������״̬�������Ӱ�졣
�ο����ף�
[1] ��͢Ӣ����ӭ��. ����δ֪������Ϣ�ı��¼���˲��㷨[J]. �人��ѧѧ��(��Ϣ��ѧ��), 2012, 37(1): 86-90.
ZUO Tingying, SONG Yingchun. Filter algorithm for slope monitoring with unknown physical information[J]. Geomatics and Information Science of Wuhan University, 2012, 37(1): 86-90.
[2] ����, ���θ�, ������, ��. ���� Kalman �˲��ں��㷨�Ŀ������¶�̬���μ���ۺ���Ϣ��ȡ[J]. ��ʯ��ѧ�빤��ѧ��, 2014, 33(8): 1520-1525.
PENG Peng, SHAN Zhigang, DONG Yufan, et al. Application of multi-sensor valuation in dynamic deformation for landslide monitoring based on Kalman filtration fusion theory[J]. Chinese Journal of Rock Mechanics and Engineering, 2014, 33(8): 1520-1525.
[3] ��͢Ӣ, ��ܿܿ, ��ӭ��. ���¼�������ӦԼ�������˲��㷨�о�[J]. ��ز����������ѧ, 2011, 31(6): 94-99.
ZUO Tingying, WU Yunyun, SONG Yingchun. Adaptively robust constrained filtering algorithm[J]. Journal of Geodesy and Geodynamics, 2011, 31(6): 94-99.
[4] ������, �콨��, �����, ��. ��ͬ�����¼����˲������ıȽ��о����Ľ�[J]. ��ز����������ѧ, 2014, 34(1): 127-130.
ZHANG Zhetao, ZHU Jianjun, KUANG Cuilin, et al. Comparative study and improvement on several de-nosing methods for different noises[J]. Journal of Geodesy and Geodynamics, 2014, 34(1): 127-130.
[5] �γ�, ɳ��, ¬��. һ�ָĽ�С����ֵ�㷨�ı��μ�������˲�����[J]. �人��ѧѧ��(��Ϣ��ѧ��), 2012, 37(7): 873-875.
REN Chao, SHA Lei, LU Xianjian. An adaptive wavelet thresholding de-noising for deformation analysis[J]. Geomatics and Information Science of Wuhan University, 2012, 37(7): 873-875.
[6] ������, �콨��, �����, ��. һ��С��������˲���������Ӧ��[J]. �人��ѧѧ��(��Ϣ��ѧ��), 2014, 39(4): 471-475.
ZHANG Zhetao, ZHU Jianjun, KUNAG Cuilin, et al. A hybrid a filter method based on wavelet packet and its application[J]. Geomatics and Information Science of Wuhan University, 2014, 39(4): 471-475.
[7] ����, �����, �ĺ���. ����С��������Kalman�˲���̬����ģ���о�[J]. �人��ѧѧ��(��Ϣ��ѧ��), 2004, 29(4): 349-353.
MA Pan, MENG Lingkui, WEN Hongyan. Kalman filtering model of dynamic deformation based on wavelet analysis[J]. Geomatics and Information Science of Wuhan University, 2004, 29(4): 349-353.
[8] YANG Yuanxi, HE Haibo, XU Guochang. Adaptively robust filtering for kinematic geodetic positioning[J]. Journal of Geodesy, 2001, 75(2/3): 109-116.
[9] ����ǿ. ����Э��������Ȩ���Ƶ�Sage����Ӧ�˲�[J]. ����ѧ, 2002, 27(2): 26-30.
CUI Xianqiang. Sage adaptive filtering with the weighted prediction of the variance-covariance matrix[J]. Science of Surveying and Mapping, 2002, 27(2): 26-30.
[10] Mohamed A H, Schwarz K P. Adaptive Kalman filtering for INS/GPS[J]. Journal of Geodesy, 1999, 73(4): 193-203.
[11] ��Ԫϲ, ��Ϊ��. ���ڷ���������Ƶ�����Ӧ�ںϵ���[J]. ���ѧ��, 2004, 33(1): 22-26.
YANG Yuanxi, GAO Weiguang. Integrated navigation by using variance component estimates of multi sensor measurements and adaptive weights of dynamic model information[J]. Acta Geodretica et Cartographica Sinica, 2004, 33(1): 22-26.
[12] YANG Yuanxi, CUI Xianqiang, GAO Weiguang. Adaptive integrated navigation for multi-sensor adjustment outputs[J]. The Journal of Navigation, 2004, 57(2): 287-295.
[13] �����, ��Ԫϲ. �Ľ���Sage����Ӧ�˲�����[J]. ����ѧ, 2000, 25(3): 22-24.
XU Tianhe, YANG Yuanxi. The improved method of Sage adaptive filtering[J]. Science of Surveying and Mapping, 2000, 25(3): 22-24.
[14] YANG Yuanxi, XU Tianhe. An adaptive Kalman filter based on Sage windowing weights and variance components[J]. The Journal of Navigation, 2003, 56(2): 231-240.
[15] YANG Yuanxi, GAO Weiguang. Comparison of adaptive factors in Kalman filters on navigation results[J]. The Journal of Navigation, 2005, 58(3): 471-478.
[16] REN Chao, OU Jikun, YUAN Yunbin. Application of adaptive filtering by selecting the parameter weight factor in precise kinematic GPS positioning[J]. Progress in Natural Science, 2005, 15(1): 41-46.
[17] YANG Yuanxi, GAO Weiguang. An optimal adaptive Kalman filter[J]. Journal of Geodesy, 2006, 80(4): 77-18.
(�༭ �²ӻ�)
�ո����ڣ�2014-09-10�������ڣ�2014-11-22
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(41474008)������ʡ�������������(12B022)(Project (41474008) supported by the National Natural Science Foundation of China; Project (12B022) supported by Youth Project of Education Department of Hunan Province)
ͨ�����ߣ�����������ʿ�о����������ڣ����¶ܹ�����ϵͳ�����μ�����ݴ����뷽���о���E-mail:tzq_111@163.com
ժҪ�������˲�����ʱ�IJв��������������̬�ֲ������ʣ����1���˲��Ƿ��쳣�ļ�����鷽�����ж϶�̬ģ�����۲�ֲ�Ա��μ���˲����Ӱ�졣�о�������������˲������쳣ʱ��ͨ���������Ŷȵļ�����飬ȷ������Ӧ�������������ϴ��Ԥ����Ϣ���Ӷ��Ϻõ�����ģ������Ӱ�죻��������Ӧ�����˲�������μ�����ݴ���������ƽ��۲���Ϣ��Ԥ����Ϣ�Ĺ������⣬��ͨ��ʵ����֤�㷨����Ч�Ժ������ԡ�
[1] ��͢Ӣ����ӭ��. ����δ֪������Ϣ�ı��¼���˲��㷨[J]. �人��ѧѧ��(��Ϣ��ѧ��), 2012, 37(1): 86-90.
[3] ��͢Ӣ, ��ܿܿ, ��ӭ��. ���¼�������ӦԼ�������˲��㷨�о�[J]. ��ز����������ѧ, 2011, 31(6): 94-99.
[5] �γ�, ɳ��, ¬��. һ�ָĽ�С����ֵ�㷨�ı��μ�������˲�����[J]. �人��ѧѧ��(��Ϣ��ѧ��), 2012, 37(7): 873-875.
[6] ������, �콨��, �����, ��. һ��С��������˲���������Ӧ��[J]. �人��ѧѧ��(��Ϣ��ѧ��), 2014, 39(4): 471-475.
[9] ����ǿ. ����Э��������Ȩ���Ƶ�Sage����Ӧ�˲�[J]. ����ѧ, 2002, 27(2): 26-30.
[11] ��Ԫϲ, ��Ϊ��. ���ڷ���������Ƶ�����Ӧ�ںϵ���[J]. ���ѧ��, 2004, 33(1): 22-26.
[13] �����, ��Ԫϲ. �Ľ���Sage����Ӧ�˲�����[J]. ����ѧ, 2000, 25(3): 22-24.
