
ģ��PID�����ڵ������ƽ̨�е�Ӧ��
������,½�½�,��Ⱥ��
(���ϴ�ѧ ���繤��ѧԺ, ���� ��ɳ, 410083)
ժҪ: �����������ƽ̨����ѧģ��;����ϵͳ�ĸն����������ϵͳ֮��Ĺ�ϵ;���ô˹�ϵ����̬���ȷ������proportional-integral-derivative(PID)���Ʋ��������ó���PID������ģ���������ϵĿ��Ʋ���,�ڳ���PID �������Ļ���������ģ������˼��,���ݲ�ͬ��ƫ��E��ƫ��仯��EC��PID ����KP,KI��KD ������У����ʵ��������:ϵͳ����̬���ԼΪ2%;��ƽ̨��������ƫ��0.5 mmʱ,ϵͳ���ܿ��ٻص�ƽ��λ�����ȶ�����,˵��ϵͳ���кܺõĸն��������Ժ�³���ԡ�
�ؼ���: ģ��PID����; �������; �ն�; ����
��ͼ�����:TM273.1 ���ױ�ʶ��:A ���±��: 1672-7207(2005)04-0631-06
Application of fuzzy-PID control to electromagnetic suspension platform
XU Liang-qiong, LU Xin-jiang, LI Qun-ming
(School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract: The mathematical model of an electromagnetic suspension platform was built, the relation between the stiffness damping of the system and the controller system was discussed, and the PID control parameters were determined from their relations and the static errors. A control method based on fuzzy and PID control was presented. The new controller is based on the raditional PID controller, and employs fuzzy reasoning to accomplish the self-adjusting PID parameters KP, KI and KD according to different deviations E and variation rates of deviation EC. The results show that the steady state error of the system is about 2%, when the platform is deviated 0.5 mm, the system can return to the balance position and suspend stably, indicating that the system has good stiffness and damping trait, and the robustness of the system is also improved.
Key words: fuzzy-PID control; electromagnetic suspension; stiffness; damping
���ڵ������ϵͳΪ�������ȶ�ϵͳ,Ҫʵ���ȶ�����������÷�������,���,����������ƵĻ���Ҫ����ʵ��ϵͳ���ȶ����ơ��������ƽ̨�ܳ���һ�����صı�Ҫ�����Ǿ����ʵ��ĸնȺ�����,���նȺ�������Ҫ�ɿ���������[1-5]��H.L.Haberman[6]��������о��������ڡ�ԡ�衱�ĸն����ߡ�1986��,R.R.Humphris��[7]�ɵ�����ϵͳ�Ĵ��ݺ���������Ч�ն�ϵ���͵�Ч����ϵ����ϵͳ�ܷ��ȶ���Ҫ�ɿ���������;ϵͳ���������ܷ����Ҳȡ���ڿ����������,����������Ʊ����ۺϿ���ϵͳ���ȶ��Ժ�ϵͳ�ĸնȼ���������[8-14]�������proportional-intergral-derivative(PID)���������������ߵ��������Ĺ���,���������ڲ�ͬƫ��E��ƫ��仯��EC��ϵͳ��PID���������ȶ�Ҫ��,�Ӷ�Ӱ�����Ч����[CM(22] ��һ����ߡ�ģ��PID��һ���ڳ���PID�������Ļ�����Ӧ��ģ���������۽�����PID������E��EC֮��Ķ�Ԫ��ϵ,�����ݲ�ͬ��E��EC���ߵ���PID��3��������Ϊ��,���߽����������ƽ̨����ѧģ��;����ϵͳ�ջ���������������,������˹�о�ȷ��PID������ȡֵ��Χ;����ϵͳ�ĸն��������Լ��������ϵͳ֮��Ĺ�ϵ;���ô˹�ϵ����̬���ȷ��PID������
1 �������ƽ̨����ѧģ��
�������ƽ̨��ͼ��ͼ1��ʾ������,E�͵�����̶�,����ƽ̨��ת����ͨ���ݶ�����,��������ת��ת��,ת��̶���
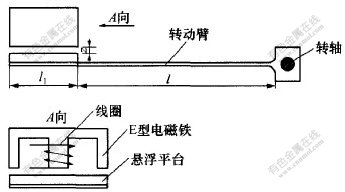
ͼ 1 �������ƽ̨��ͼ
Fig. 1 Diagram of electromagnetic suspension platform
E������ƽ̨�ĵ����FΪ:
![]()
����:��0Ϊ�����ŵ���;IΪ��Ȧ�ĵ���;NΪ��Ȧ������;A1Ϊ��(����)�ߵļ������;A0Ϊ�м�ļ������;zΪ��϶�߶ȡ�
������������ѧƽ�ⷽ��Ϊ:
![]()
����:JΪ������������ƽ̨��ת������;��Ϊ��������ˮƽλ�õļн�;m0Ϊ������������;lΪ�������ij���;mΪ�������������;gΪ�������ٶ�;l1Ϊƽ̨�Ŀ��ȡ�
��ƽ��λ��z0ʱ,a=0�Ң|=0,��ʽ(1)����ʽ(2)��:
![]()
����Ȧ����ȷ��ʱ,�ɷ���(3)����ȷ��ƽ��ʱ�ĵ���I0��
����ת���ǶȦ���С,���Ƶؿ�����Ϊ:
![]()
������(2)��ƽ��λ��(I0,z0)��������̩��չ��ʽչ��,�����Ը߽���,�õ���ϵͳ�Ĵ��ݺ���Ϊ:
![]()
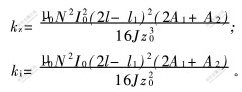
����:kz��ki�ֱ�Ϊλ�Ƹն�ϵ���͵����ն�ϵ��,��
2 ģ��PID�����������
����ģ������ԭ��,����Ӧģ��PID�����������E�����仯��EC��Ϊ�����ź�,�����㲻ͬʱ�̵�E��EC��PID������������Ҫ��,����ģ�����ƹ������߶�PID��������3�����Ʋ���KP,KI��KD3���������е�����
2.1 ����PID������ȷ��
ͼ2��ʾΪ����ϵͳ��ͼ������,����ϵͳ����������,������˹�о�,ȷ��ʹϵͳ�ȶ��IJ�����Χ;Ȼ��ͨ��ϵͳ�ĸնȡ��������̬���ȷ���������IJ���������F(s)����϶z(s)�Ĵ��ݺ���Ϊ:
![]()
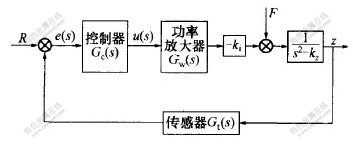
ͼ 2 ����ϵͳ��ͼ
Fig. 2 Diagram of control system
����ѧ�ɵõ������ƽ̨�ĸն�K������d�ֱ�Ϊ:

����:Re(F)��ʾF��ʵ��;Im(F)��ʾF���鲿��
����PID�������о��л�����,��G(s)Ϊn��ϵͳ,��PID���ƺ�ϵͳ��Ϊn+1��,���ݸ�������̬���ָ��ess������ʽȷ������KI��
![]()
�ɷ���(6),(7)��(8)���Եó�PID��3������KP,KI��KD��
2.2 ģ��PID�����������
ͼ3��ʾΪģ���Ե���PID���ƽṹͼ��ģ�������������롢�������������������PID ����ģ���������Ĺؼ���ȷ��PID3�������ı仯����KP,��KI�ͦ�KD ������ƫ��ֵE��ƫ��仯��EC֮���ģ����ϵ,��ϵͳ���еĹ����в��ϼ��E��EC,�ٸ���ģ������ԭ����3����������������,Ȼ��,�ֱ���KP,KI��KD���,�����㲻ͬE��EC�Կ��Ʋ����IJ�ͬҪ��. �������Ϸ���,ѡ��ϵͳƫ��E��ƫ��仯��EC ��Ϊģ�����������������,���侫ȷ��ģ����,�Ԧ�KP,��KI�ͦ�KD3��������Ϊ��������� ����E,EC,��KP,��KI,��KD ģ������ģ���Ӽ���Ϊ{NB,NM,NS,ZE,PS,PM,PB}������:NB,NM,NS,ZE,PS,PM��PB�ֱ��ʾ�����С���С���㡢��С�����к�����������ĸ��dz̶Ⱥ������ȡ��ȶ�����³����ԭ��,��ģ���Ӽ���ѡ������������������
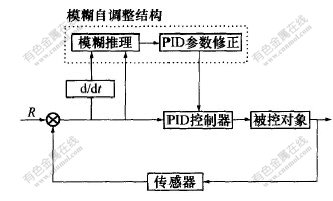
ͼ 3 ģ��PID���ƿ�ͼ
Fig. 3 Diagram of fuzzy PID
ģ���������ĺ����ǡ�IF-TNEN����ʽ��ģ�����ƹ����ƹ����ѡȡֱ�Ӿ���ϵͳ�������ܵ�����, ����ƵĹؼ�����PID ������, KP,KI��KD���������ص�:
a. ��������KP������Լӿ���Ӧ�ٶ�,��Сϵͳ��̬���,��߿��ƾ���;����,�����������ʹϵͳ��������,�������²��ȶ���
b. ����������Ҫ������ϵͳ��̬���, ��ǿ��������,�����ڼ�Сϵͳ��̬���;����,��KI ����,���Ӵ�,����������
c. �����ÿ��Ը��ƶ�̬����,����������KD,�����ڼӿ�ϵͳ��Ӧ, ʹϵͳ��������С, �ȶ�������,���俹���С�����������������;��KD ����,���ֳ�����������, ����ʱ������; ��֮,��KD ��С,��ϵͳ��Ӧ����,�ȶ��Ա�����
����˫���롢˫�����ģ��������,����ƹ����д��������ʽ:
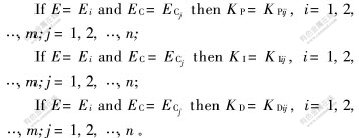
������������,ͬʱ����3������֮����Ӱ��,����һϵ�е��������Թ���,��KP,��KI�ͦ�KD,KD��E��EC��ģ����ϵ�ֱ����1,2��3��ʾ��
���ݦ�Kp,��KI�ͦ�KD�������Ա�����ģ�����ƹ����,�������Ӧ��ģ����ϵ,��R1,R2,��,Rn�����,��Kp,KI��KD���ܵĿ��ƹ�������Ӧ��ģ����ϵR�ֱ�Ϊ:
![]()
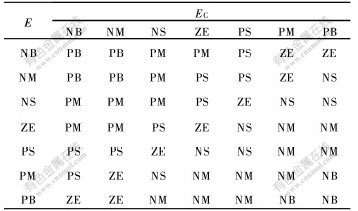
�� 1 ��KP ģ�����ƹ����
Table 1 Fuzzy rule table of ��KP
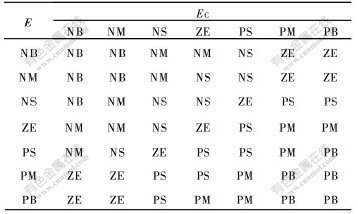
�� 2 ��KI ģ�����ƹ����
Table 2 Fuzzy rule table of ��KI
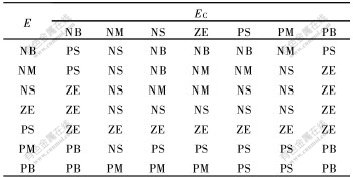
�� 3 ��KD ģ�����ƹ����
Table 3 Fuzzy rule table of ��KD
Ӧ��ģ�������ϳɹ���,�õ���Ӧ�Ħ�Kp,��KI�ͦ�KD��ģ����Ϊ:
�ֱ��������ȷ��PID ���������������,��������KP��,��KI��ͦ�KD��У�����IJ�ѯ��;Ȼ��,��У���������������ڴ档ʵʱ����ʱ,���ȸ���|E (k)|��|EC(k)|�ӱ��в�ѯУ������KP��,��KI��ͦ�KD���ֵ;Ȼ����ü�Ȩƽ������ģ�����任����ȷ�Ŀ�����,��ȥģ����,������յĦ�KP,��KI �ͦ�KD;�ٷ����볣��PID�Ļ�ֵKP,KI��KD�ֱ����,�Ӷ��õ��ڸ�״̬��ʵʩ��������Ӧ�����KP,KI��KD����,Ȼ���ճ���PID �㷨�����������㡣
3 ʵ�鼰����
������Ϊ������λ�ƴ�����,����������DSP��TMS320LF2407���ʵ�֡����ض���Ĵ��ݺ���Ϊ:
![]()
����ϵͳ����������,������˹�о�,�õ�ʹϵͳ�ȶ���PID�����ķ�Χ������������,ʹϵͳ�ȶ���PID�����ķ�Χ�����²���ʽȷ��:
![]()
�ն�Ϊ�㶨ֵ,������Ƶ�ʵı仯���仯,���ն�Ϊ15 kN/m,��Ƶ��Ϊ100 Hzʱ,����Ϊ186,��ʱ����Ȧ�=0.71,��̬���Ϊ0.05���Ӷ��õ�����PID��3��������Ϊ:KP=44;KI=10;KD=0.0037��
ģ��PID������ѡȡ����:
ͼ4��ʾΪ���ó���PID������ʱϵͳ��λ�Ʋ���;ͼ5��ʾΪ����ģ��PID������ʱϵͳ��λ�Ʋ��Ρ��ɼ�,����ģ��PID������ʱ,ϵͳ��λ�Ʋ�������ϲ��ó���PID������С,���ƾ��ȸ�,���Ҳ��θ�ƽ����
ͼ 4 ����PID����ʱλ�Ʋ���ͼ
Fig. 4 Displacement graph when using traditional PID controller
ͼ 5 ģ��PID����ʱλ�Ʋ���ͼ
Fig. 5 Displacement graph when using fuzzy PID controller
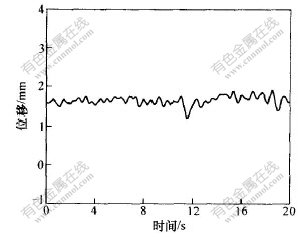
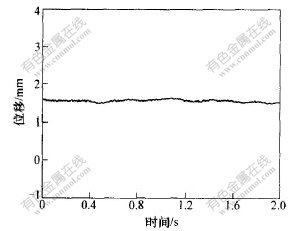
ͼ6��ͼ7��ʾ�ֱ�Ϊϵͳ��ʱ��λ�Ʋ��κ�ֹͣʱ��λ�Ʋ��Ρ��ɼ�,ϵͳ��ʱ����û�г�����,����ʱ��Ϊ0.1 s,��̬���ԼΪ2%;ϵͳֹͣʱλ��ƽ���½�,�Ӷ��ɱ����֧�żܵij�������,ϵͳ���п����ҳ�����С�������ܺ�ƽ�ȵ��½����ܡ�
ͼ8��ʾΪϵͳ�ܵ���Ӹ���ʱ��λ�Ʋ��Ρ���ϵͳ�ܵ���Ӹ���ʱ,ƽ̨��������ƫ��0.5 mm,ϵͳ���ܿ��ٷ���ƽ��λ�����ȶ�����,˵��ϵͳ���н�ǿ�ĸնȡ�³���ȶ��ԺͽϺõ��������ԡ�
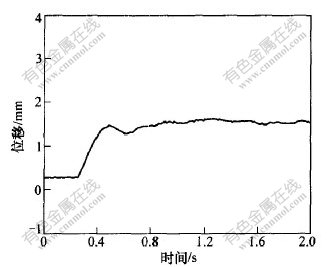
ͼ 6 ϵͳ��ʱ��λ�Ʋ���ͼ
Fig. 6 Displacement graph of system when suspended
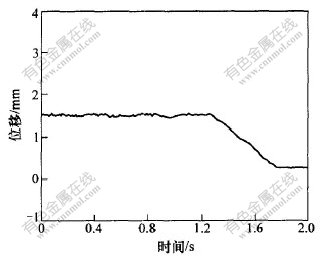
ͼ 7 ϵͳֹͣʱ��λ�Ʋ���ͼ
Fig. 7 Displacement graph of system when ceased
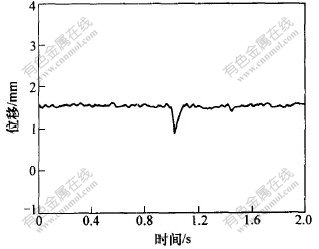
ͼ 8 ��Ӹ���ʱ��λ�Ʋ���
Fig. 8 Displacement graph when disturbed
4 �� ��
a. ���øնȺ�����ȷ����PID�����ܹ����������Խ�Ŀ�����,������Ƽ�
b. �ÿ�������ʹϵͳ�ȶ�����,�ն��������Ժ�,�ҿ��ƾ��ȸ�,ʵʱ�Ժá�
c. �ÿ�������ʹϵͳ�Խ�Ծ��Ӧ���кܺõ�˲̬���ܺ���̬����,�ܹ�������Ӹ���,ϵͳ����Ӹ��ž��к�ǿ��³���ȶ��ԡ�
�����:
[1]����,�Ի�,�Ժ��. �ɿش�������иն������������о�[J]. �廪��ѧѧ��, 1999, 39(4): 96-99.
ZHAO Lei, CONG Hua, ZHAO Hong-bin. Study on stiffness and damping characteristic of active magnetic bearing[J]. Journal of Tsinghua University, 1999, 39(4): 96-99.
[2]Changhwan C, Kyihwan P. Self-sensing magnetic levitation using a LC resonant circuit [J]. Sensors and Actuators, 1999, 72(3): 169-177.
[3]Lin C S, Lay Y L,Chen P W. Research on magnetic bearing flywheels for attitude control of spacecraft[J]. Comput Methods Appl Mech Eng, 2000, 190: 25-34.
[4]Mgnfred E, Wahner U. Linear magnetic bearing and levitation system for machine tools[J]. Annals of the CIRP, 1998, 47(1): 311-314.
[5]WANG Zhang-hai, WANG De-jun. Dynamic characteristics of a rolling mill drive system with backlash in rolling slippage[J]. Journal of Materials Processing Technology, 2000, 97(1): 69-73.
[6]Haberman H L. An active magnetic bearing system[J]. Tribology International, 1980, 12(4): 85-89.
[7]Humphris R R, Kelm R D, Lewis D W. Effect of control algorithms on magnetic journal bearing properties[J]. Journal of Engineering for Gas Turbines and Power, 1986, 6(33): 624-632.
[8]�η���,�β�,��³��. ���������иնȺ��������[J].���ϴ�ѧѧ��, 2002, 16(2):121-123.
SONG Fang-zhen, SONG Bo, LIU Lu-ning. Design of electromagnetic bearing stiffness and damping[J]. Journal of Ji��nan University, 2002, 16(2): 121-123.
[9]Bar A. Parametrical excitement vibration in tandem mills: mathematical model and its analysis[J]. Journal of Materials Processing Technology, 2002, 129(1):148-151.
[10]������.�Ƚ�PID���Ƽ���Matlab����[M].����:���ӹ�ҵ������,2003:15-25.
LIU Jin-kun. Advanced PID control and its Matlab emulation[M]. Beijing: Electronics Industry Press, 2003:15-25.
[11]Gasparic J J. Vibration analysis identifies the cause of mill chatter[J]. AISE Year Book, 1991, 56(3): 25-29.
[12]������, ������.ģ��PID �����ڹ�ҵ��¯����ϵͳ�е�Ӧ��[J]. ��ҵ¯, 2004, 26(3): 38-40.
PAN Xiang-liang, LUO Li-wen. Application of the Fuzzy-PID control in industrial boiler control system[J]. Industrial Furnace, 2004, 26(3): 38-40.
[13]Wu Y X, Duan J A. Frequency modulation of high-speed mill chatter[J]. Journal of Materials Processing Technology, 2003, 134(2): 214-224.
[14]������,������.����ģ��������PID�������ķ�����ϵͳ����[J]. ���ݽ�ͨ��ѧѧ��, 2004, 23(3): 62-64.
GU Sheng-jie, LIU Chun-juan. Simulation of nonlinear control system based on self-adjusting PID controller of fuzzy inference[J]. Journal of Lanzhou Jiaotong University, 2004, 23(3): 62-64.
�ո�����:2005-04-01
������Ŀ:�����ص�����о���չ�ƻ���Ŀ(2003CB716206)
�����:������(1964-), Ů, ����˼é��, ��ʦ, ���»�е�������Զ����о�
������ϵ��: ������, Ů, ��ʦ; �绰: 0731-8836858(O); E-mail:YLQ@mail.csu.edu.cn
[1]����,�Ի�,�Ժ��. �ɿش�������иն������������о�[J]. �廪��ѧѧ��, 1999, 39(4): 96-99.
[6]Haberman H L. An active magnetic bearing system[J]. Tribology International, 1980, 12(4): 85-89.
[8]�η���,�β�,��³��. ���������иնȺ��������[J].���ϴ�ѧѧ��, 2002, 16(2):121-123.
[10]������.�Ƚ�PID���Ƽ���Matlab����[M].����:���ӹ�ҵ������,2003:15-25.
[12]������, ������.ģ��PID �����ڹ�ҵ��¯����ϵͳ�е�Ӧ��[J]. ��ҵ¯, 2004, 26(3): 38-40.
[14]������,������.����ģ��������PID�������ķ�����ϵͳ����[J]. ���ݽ�ͨ��ѧѧ��, 2004, 23(3): 62-64.
