
��ɿ���������ϵͳ��ģ����ģ�����Ʒ���
�����࣬���پ����� ��
(���ϴ�ѧ ���繤��ѧԺ������ ��ɳ��410083)
ժ Ҫ��
ժ Ҫ�������й�����Э��(COMRA)�ⶨ��1 000 m��������������Բɿ�ϵͳ������������ϵͳ��Ʒ�����1 km���Ե�״����Ӧ��ţ�ٵڶ��˶����ɺ�MATLAB�����������˸�ϵͳ����ѧģ�ͣ��Ը���ѧģ�ͽ���ģ�����Ʒ����о���������������1 km������������������˫������������������ϵͳ����Ӧ����Ҫ����4�����������£���ϵͳʵʩģ���������ܵõ�����Ŀ���Ч�������ڸ��Ӻ��������£���������Ƶ�������ӣ�ϵͳ����������Ч������½���������Ƶ�ʴ���0.7 Hzʱ������ʽģ�����Ƽ�������Ч������ˣ�������0~0.7 Hz��Χ�ڲ�������ʽģ�����ƣ���������Ƶ�ʴ���0.7 Hz��Χ��ʵʩ����ʽ����������
�ؼ��ʣ�
��ģ������������ģ��������������
��ͼ����ţ�TP391.9 ���ױ�ʶ�룺A ���±�ţ�1672-7207(2008)01-0128-07
Modeling of heave compensation system for deep-ocean mining and its simulation of fuzzy logical control
TANG Xiao-yan, LIU Shao-jun, WANG Gang
(School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract: According to the design scheme of a heave compensation subsystem proposed by the COMRA (China Ocean Mineral Resources & Association) 1 000 m deep ocean poly-metallic nodule pilot mining system and the wave conditions of sea region of 1 km sea trial, a corresponding mathematics model of this system was built by using the Newton��s law and MATLAB software. The simulation study of a fuzzy control based on this model was conducted. The results show that this proposed active heave compensation system with two lift cylinders is suitable for 1 km sea trial. The satisfactory control effectiveness can be obtained in the simulation on the condition of sea state 4. However, the heave compensation effectiveness declines gradually with the increase of outside disturbance frequency. When the frequency is larger than 0.7 Hz, there is scarcely any vibration damping effect in this active fuzzy control. Hence the improvement suggestion is proposed that an active fuzzy control should be used within the frequency of 0-0.7 Hz, while a passive heave compensation should be used if the frequency is larger than 0.7 Hz.
Key words: modeling; heave compensation; fuzzy control; simulation
ˮ������ʽ����������˲ɿ�ϵͳ��ˮ��ɿ����ܡ������������ɡ�����ˮ��װ�ý��溣��IJ��˲�������������ҡ���˶����Ӷ�����������ǧ����������Ӧ���˶�����ʹϵͳ�в�����ĸ����غɣ���ɺ�����ҵװ�õIJ��ȶ���������������ϵ��������Ӱ�칤��Ч�ʣ������Ҫ��ȡ����������ʩ��Сˮ�²��ֵ����Ա�֤�ɿ��˳�����С�
������ҵ��������ϵͳ���о�ʼ��20����70��������ڵ���ɿ�װ�ö������Һ��������������ϵͳ[1-5]���磺����Global Marine Inc��˾������ 7.5 kt�����������������������ϵͳ�ɹ�ͨ��5 km����[4-5]��Driscoll��[3]�ȽϷ����˷ֱ�װ����������м�ֵ����ֱ���ʽ��������ϵͳ�������ڼ��ɿ����汻��ʽ��������ϵͳ��һ�������ƣ������ڳ���Ƶ����������ĺ����ˡ���������Ӱ��ȴ������Ч���ƣ��������Ȳ��ߡ�������һЩ�о���Ϊ�����������Ч���������ܺģ�����˶�����������ʽ��������ϵͳ[6-9]����Kirstein[7]�����һ������ʽ��������ϵͳ�����ô�����ƥ�������ʹ��ܱõ�Һѹϵͳ��ͨ�������Ļ��պͺ�����������߹���Ч�ʣ�����ϵͳ�ṹ���ӡ�ά���ɱ��ϸߡ�
�������Ŀ��ɱ���˷������ӵ��ⲿ����(��ò����ѹ�����¡�������)������������Ѻͷ��գ�ÿһ�ο��ɼ����ĺ������鶼�����Ѱ�������龭�ѡ����ü��������Ϊ��������ϵͳ������ѧģ�ͣ�������в�����ơ��������ܷ������������Ч���ͷ��գ�Ϊ��������ϵͳ����ơ����켰�����ṩ�������ݺͺ����ļ���������
1 ��������ϵͳ����ɼ�����ԭ��
�й������Դ����������ʵ���о���[10]���й�����Э��(COMRA)���ⶨ��1 km��������������Բɿ�ϵͳ������������ϵͳ��Ʒ�����ͼ1��ʾ��ϵͳ��Ҫ��˫������װ�á�Һ���Ͽ���װ�á�����ƽ̨�����װ�õ���ɡ�˫������װ�ð�װ�ڴ�������������ƽ̨֮�䣬����ƽ̨���غ�������Һѹ�ͳ��ܡ����л�����������������ƽ̨�������ĸ���̶��������ϡ��������������洬����������ʱ��ֻ�Ǵ����ĸ��������������˶����������л���������������������ƽ̨����Ӱ���ͨ��Һѹ��������Լ�С������ڴ�����ױ�����һ����Χ����С�������Ӷ�ʵ�ֲ����������á�

ͼ1 ��������ϵͳ�ṹʾ��ͼ
Fig.1 Structural schematic diagram of heave compensation system
��˫������װ�ã��ڲ��Ż��������ϵͳʱ�����·ź��������ܣ�������ҵ��ɺ��ֿ�ת��������������״̬�����ڴ��Ľ��ˡ��ᵴ����βҡ�˶�(��ͼ2��ʾX(1)��Y(2)��![]() ����)�������������������в�����ֻ�ܸ��ƴ���������ṹ��������������������Կ��ơ������ڴ��IJ��㡢������(��ͼ2��ʾ
����)�������������������в�����ֻ�ܸ��ƴ���������ṹ��������������������Կ��ơ������ڴ��IJ��㡢������(��ͼ2��ʾ![]() ��
��![]() ����)�����ô�����ڽṹ������ƽ̨��������������ܶ�����-8?~+8?����Բ���ת������-5?~+5?���������ת����ʵ����ɿ��У�������������Ҫ�����ڲ���ƽ̨�ڷ����������µĴ���λ�ơ�
����)�����ô�����ڽṹ������ƽ̨��������������ܶ�����-8?~+8?����Բ���ת������-5?~+5?���������ת����ʵ����ɿ��У�������������Ҫ�����ڲ���ƽ̨�ڷ����������µĴ���λ�ơ�
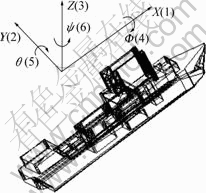
ͼ2 �����6���ɶ�ʾ��ͼ
Fig.2 Schematic diagram of ship��s six degree of freedom
2 ����ϵͳ����ѧģ��
2.1 ϵͳ�Ķ���ѧ����
��ģϵͳ�����������������ƽ̨��Ϊ���о�ϵͳ����Ҫ�������ԣ����û���ϵͳ����ѧ�����ļ�ģ�ͣ����������Ϊ��
a. ������Ҫ�ڴ�ֱ���������������������Ժ�С��
b. ϵͳ���ٶ�С���ɴ���������ܵ�ˮƽ�ɺ��ԣ�
c. �����ھ�ˮ�����ȶ�ƽ��ģ��༴���������;�ˮ������ƽ�⣻
d. ���ݽ����Ͳ�������[11]������ʹ����ҡ����������Ϊֻ�в�����������ҡ��������ˮ���������ʹ���ƫ��ƽ��λ�õľ�ˮ�ظ�����
��������ƽ̨�ʹ��������������ͼ3��ʾ��
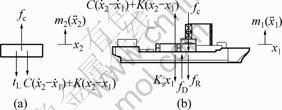
(a) ��������ƽ̨; (b) ����
ͼ3 ��������ƽ̨�ʹ������������
Fig.3 Analysis of endured forces on heave platform and ship
����ţ�ٵڶ��˶����ɣ�����������ƽ̨�ʹ���Ķ���ѧ�������£�
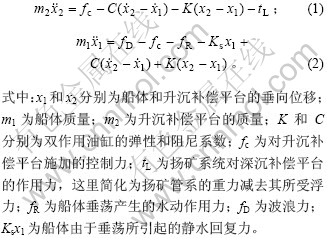
���ں��Ѿ�ȷ�����������ܵ���fR��fD��Ksx1�����Ը��������������һЩ�˶�����ģ�⼸����������ϵͳ��������������������Dz���ȫ�淴ӳ���ڸ��������µ���ʵ�˶������ɻ���֤������Ƶ���������ϵͳ���С���Ч��
��ʽ(1)�е�ƽ̨�Ĵ���λ��x2��дΪZp������Ĵ���λ��x1��дΪZc�����ܿ�����fc=U1+U2+tL������U1��U2�ֱ�Ϊ����������������ƽ̨����λ�Ʋ����Ŀ�����������ţ�ٵڶ��˶����ɣ����÷���ʽ(1)�ɸ�дΪ��
![]()
2.2 �����˶���
����ֱ�Ӻ��˹��̵���������̴�����������˶�Ҳ��ȫ��һ�־���������ʵ��˶�����ˣ����ü���ķ���Ԥ�ȸ���������ijһָ����ʱ�������е��˶���ʽ�������ڲ����м����˶������ɹ����������������ɴ��屾�����������ɣ����л���һ�������洬��������˶���Һ�������(����������)�����Ҵ��������ˮ�ʵ����㲻�ɴ�����������������������洦�����ʵ�ķ����ٶȵ��ڴ������Ӧ�� ��[11]����ˣ����Կ����Ը�������Ϊ�����о�������
��Ʒ���������ڽṹ������ˮ�洬���㡢�����ˮ���豸��Ӱ�죬����о���ֻ���Ǵ���������������Ϊ4��������һ���Ĺ�����״�������۲촬���ڴ�����˶���
��������ʽΪ��
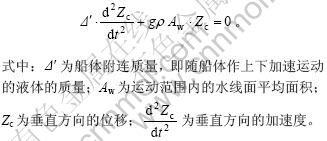
�ɴ˿ɵã�

4�����������TZ���Ƶ��ڲ�������3~9 s����t=0ʱ��Zc=0����![]() =0������4����������´������������λ�Ƶ��ڲ���(1.2~2.4 m)����H=0.6~1.2 m������������˶�����Ϊ��
=0������4����������´������������λ�Ƶ��ڲ���(1.2~2.4 m)����H=0.6~1.2 m������������˶�����Ϊ��
2.3 ϵͳ��״̬����

3 ģ������ϵͳ���
�������ӣ�Ŀǰ����ȷ����ȫ������Ҫ�ء�����ϵͳ�ĸ��Ӽ������IJ�ȷ���ԣ����IJ���ģ������������Ϊ��������ϵͳ���������ƵĿ��Ʋ��ԡ�������������нϺõ�³���ԣ��Ҳ���Ҫ��������ϵͳ�ľ�ȷ����ѧģ�ͣ��ɱ�����ϵͳ��ģ��������Ӱ��[13-15]����ˣ��ڼ����˶���������������������ϵͳ��ѧģ�Ϳ��������з����о���
3.1 ģ������ϵͳ���
ģ������ϵͳ�����ͼ4��ʾ������һ�����͵Ķ�ά�ĵ����뵥�����ϵͳ��ͼ�У�x1(m)Ϊ��������ƽ̨��ʼλ�ã�x2(t)Ϊ��������ƽ̨λ�ƣ�A/DΪģ��ת������D/AΪ��ģת������ϵͳ�����Ӧ��״̬����ʽ��ʾ��

ͼ4 ģ������ϵͳʾ��ͼ
Fig.4 Schematic diagram of fuzzy control system
һ��˵����ģ����������ά��Խ�ߣ�����Խ��ϸ����ͬʱ���ƹ����ø��ӣ������㷨����ʵ�֡���ϵͳ����������ƽ̨�뿪ƽ��λ�õ�λ������仯Ϊ���룬�Կ�����������ƽ̨λ��Ϊ�������Ϊƽ̨λ����һ����ֱ�۷�ӳϵͳ����Ч���������������ü۸������λ�ƴ������Ϳɽ����źŲɼ�������Ч����ʵ��ϵͳ�ɱ���ͬʱͨ����ּ�����Է�������ϵͳ���������������
3.2 ģ�������������
����У���������������(e)�����仯ֵ(?e)����ȡ7���ȼ���ģ���Ӽ�Ϊ��{�����У���С���㣬��С�����У�����}={NB, NM, NS, ZE, PS, PM, PB}���������Ҳ��Ϊ7������������={�����С���С���㡢��С�����С�����}�������������������������״ȡΪ�����Σ��������ϼ���������������״��������������ڴﵽ����Ҫ���沢�����
ģ�������ѡ�������ģ���������ĺ��ģ������ԭ���ǣ������ϴ�ʱ���������ı仯Ӧ����ʹ���Ѹ�ټ�С���ӿ�ϵͳ��Ӧ�ٶȣ�������Сʱ������Ҫ����ϵͳ��̬����⣬��Ҫ����ϵͳ���ȶ��ԣ���ֹϵͳ��������Ҫ�ij��������������յ���ҵģ������ϵͳ�Ŀ��ƹ���[14]������ϴ�ϵͳ���ص㣬ȷ���˲��õ�ģ�����ƹ������1��
��1 ϵͳ��ģ�����ƹ���
Table1 Fuzzy control rules of this system

ģ����������ʵ�ʹ���ʱ���������ÿ��Ʋ�ѯ������ʽ���������Լӿ����ϵͳ����Ӧ�ٶȡ���ѯ��һ���ɼ���������㣬������ڼ�����ڴ��У�ʵʱ���ƹ����и���ģ������������ֵ�����仯ֵ��ֱ�Ӳ�ѯ���Ʊ��Ի�ÿ������ı仯ֵ��Ȼ���ٳ��Ա������ӣ�������Ϊ���ȥ���Ʊ��ض�������ƵĿ��Ʋ�ѯ������2��
��2 ģ���������Ŀ��Ʋ�ѯ��
Table 2 Control inquiry table of fuzzy controller

4 ��������ϵͳģ�����Ʒ��漰�������
�������ϵ���ѧģ�ͣ���������Math Works��˾�����Ŀ���ϵͳ������������MATLAB 6.5�����Ʒ��������ϵͳ�����ͼ��ͼ5��ʾ�����У�3������ģ�������������롢������������������MATLAB�������п���Ч�����棬ͨ������ѡ��ģ���������IJ�����ģ�������������Ӻͱ������ӵȣ��ܴﵽ�ϺõĿ���Ч�����о��У�ȡ����ʱ��TS= 0.05 s��k1=300��k2=200��k0=500 000/7��2��Һѹ����һ������ͬģ�����ƹ���Ŀ���ϵͳ����Ƶ�1 km����˫����װ������������ԼΪ3 MN������ѹ��Ϊ20 MPa����������������������������Ҫ��

ͼ5 ģ������ϵͳ�����ͼ
Fig.5 Simulation block diagram of fuzzy control system
�����й���������������Բɿ�ϵͳ1 000 m�����������巽������Ҫ���Ի�����ҵ����Ҫ��С��4������Ҫ����Ϊ������9.26~10.3 m/s�����˸߶�1.2~2.4 m����������3~9 s�����������ٶ�2 m/s�����������ٶ�0.8 m/s����4����������£��ٶ�����������������0.6~1.2 m�����ȡֵ��������3~9 s��ȡֵ(��T=5 s)����ˮ�洬�����˶���λ����ͼ6��ʾ���ڴ�����������������(������Ƶ��Ϊ0.2 Hzʱ)���о�ģ������ǰ������ƽ̨��λ�Ʊ仯����������ͼ7��ʾ��
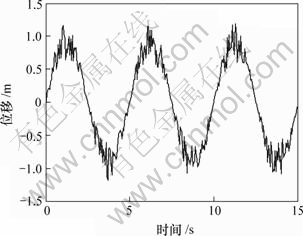
ͼ6 ����Ϊ5 s�����Ϊ0.6~1.2 mʱ���Ĵ���λ�Ʊ仯
Fig.6 Heave motion of ship at 5 s period with amplitudes of 0.6-1.2 m
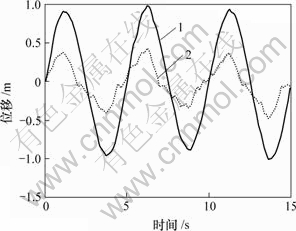
1������ǰ��2�����ƺ�
ͼ7 ����Ƶ��Ϊ0.2 Hzʱ����ǰ������ƽ̨�Ĵ���λ�ƶԱ�
Fig.7 Heave motions comparison of platform with control or without control at frequency of outside disturbance of 0.2 Hz
��ͼ7���Կ��������Ŷ�Ƶ��0.2 Hz(T=5 s)ʱ��ģ������ǰ����������ƽ̨�Ĵ�����������˥����˥�����ȴ�60%��ƽ̨�Ĵ���λ�Ƹ����Ŷ������ұ仯��û�з����ͺ�����
��0.11~0.33 Hz(��T=3~9 s)��Χ�ڵ����Ŷ�Ƶ�ʣ����Եõ�����50%�ļ���Ч����˵���ں���Ϊ4��������£�����ģ�����Ƶ���������ϵͳ�������Ƚϸߣ��ܴﵽϵͳ���ָ��(����ϵ����50%����Ӧ�ͺ�ʱ���2~3 s�����������г�Ϊ2.0~3.0 m)��
Ϊ��һ�����з����о������Ŷ�Ƶ��ȡ0.4��0.6��0.8��1.5 Hzʱ���Ƚ���������ϵͳ�ļ���Ч���������ͼ8��ʾ��
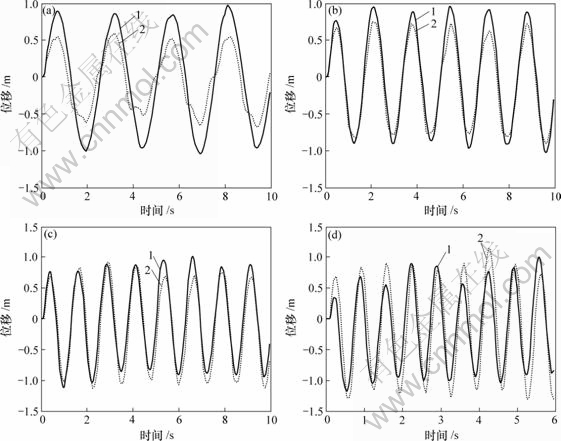
����Ƶ��/Hz��(a) 0.4��(b) 0.6��(c) 0.8��(d) 1.5
1������ǰ��2�����ƺ�
ͼ8 ����Ƶ�ʲ�ͬʱ����ǰ������ƽ̨�Ĵ���λ�ƶԱ�
Fig.8 Heave motions comparison of platform with control or without control at different frequencies
��ͼ8��֪�������Ŷ�Ƶ�������ӣ�ϵͳ�ļ���Ч�������½�������ʧ�ء����Ŷ�Ƶ�ʴ���1.5 Hzʱ������Ƶ���������ƽ̨ʵʩ��ģ�����Ʋ��Ե��������������κμ���Ч�����ҿ����źŵı仯���ң����ƿ�ʼ��ɢ����ˣ����Ŷ�Ƶ�ʴ���0.7 Hz��������ģ���������Ƽ�������Ч��ʱ��Ӧȡ����������״̬������ת��Ϊ����ʽ��������ϵͳ��
���ں��Ի������ӣ�ʵ�ʲɿ��и��Ӻ��������⣬���ܴ�ʱ����ֹͣ�ɿ���ҵ�����Դ��ڼ���ͱ���ˮ���豸�����⣬���ԣ���Ƶ���������ϵͳӦ�����ڸ��������²����ƻ���������һ���ļ������á�����Ľ���������ϵͳ�������ڲ��ṹ��������Һѹ��·����������Ƶ�ʵ��жϿ��ƻ�·����ʵ����0~ 0.7 Hz��Χ�ڵ���������ʽ�����������ڴ���0.7 Hz��Χ�ڵı���ʽ����������
5 �� ��
a. ����1 km������������������������˫��ʽ��������ϵͳ��������������������ϵͳ��ѧģ�͡�
b. 1 km������������������������˫��ʽ��������ϵͳ��������Ӧ����Ҫ���ں���С��4��ʱ������Ƶ���������ϵͳ�ɴﵽϵͳ���ָ�꣬�õ�����Ŀ���Ч����
c. �����Ŷ�Ƶ�ʵ������ߣ�ϵͳ�ļ���Ч�������½������Ŷ�Ƶ�ʴ���0.7 Hzʱ��ϵͳ��ģ���������ʧЧ���ɴ˽�����0~0.7 Hz��Χ�ڲ�������ʽģ�����ƣ������Ŷ�Ƶ�ʴ���0.7 Hz��Χ��ʵʩ����ʽ����������
�ο����ף�
[1] Abraham Person L A, Vance E Bolding R B. Heave compensation apparatus for a marine mining vessel: United States, 4039177[P]. 1977-08-02.
[2] Chung J S, Tsurusaki K. Advance in deep-ocean mining systems research[C]//Proceedings of the 4th International Offshore and Polar Engineering Conference. Osaka, 1994: 18-31.
[3] Driscoll F R, Nahon M, Lueck R G. A comparison of ship-mounted and cage-mounted passive heave compensation systems[J]. Journal of Offshore Mechanics and Arctic Engineering, 2000, 122(3): 214-221.
[4] Fiedler H, Hofmann H, Markfelder G. Facts about the FAG bearings on the hughes glomar explorer[J]. Ball and Roller Bearing Engineering, 1975, 14(2): 30-34.
[5] McNary J F, Person A, Ozudogru Y H. A 7 500 ton capacity shipboard completely gimbaled and heave compensated platform[J]. Journal of Petroleum Technology, 1977, 29(4): 439-448.
[6] Haney J D, Carey D W. Low power/high performance active heave compensation[J]. Sea Technology, 2002, 43(7): 23-31.
[7] Kirstein H. Active heave compensation systems on board of vessels and offshore rigs[J]. MT Meerestechnik, 1986, 17(2): 59-61.
[8] Korde U A. Active heave compensation on drill-ships in irregular waves[J]. Ocean Engineering, 1998, 25(7): 541-561.
[9] Hsueh W J, Lee Y J. A hydraulic absorber for wideband vibration reduction in ship hull[J]. Journal of Offshore Mechanics and Arctic Engineering, 1994, 116: 43-48.
[10] LIU Shao-jun, WANG Gang, LI li. Virtual reality research of ocean poly-metallic nodule mining based on COMRA mining system[C]//Proceedings of the fifth ISOPE Ocean Mining Symposium. Tsukuba, 2003: 104-111.
[11] �����. �����Ͳ���[M]. ������: ��������������ѧԺ������, 1992.
LI Ji-de. The seakeeping capacity of vessel[M]. Harbin: Shipping Engineering Institute of Harbin Press, 1992.
[12] �����, �����, ������, ��. �ִ����漼����Ӧ��[M]. ����: ������ҵ������, 2006.
KANG Feng-ju, YAN Hui-zhen, GAO Li-er. Modern simulation technique and application[M]. Beijing: National Defense Industry Press, 2006.
[13] Ф���, ��ٺ�, Ф���, ��. ģ��-PID��������ɿ���������ģ��ϵͳ�е�Ӧ��[J]. Һѹ������, 2004(10): 49-51.
XIAO Qi-jun, WU Bai-hai, XIAO Ti-bing, et al. Fuzzy hybrid PID control applied in the deep sea mining heave compensate simulation system[J]. Hydraumatic and Pneumatic, 2004(10): 49-51.
[14] LIU Shao-jun, HUANG Zhong-hua, CHEN Yi-zhang. Automobile active suspension system with fuzzy control[J]. Journal of Central South University of Technology, 2004, 11(2): 206-209.
[15] ������, ���پ�, �� ��, ��. ��ɿ���������ϵͳ���Ե���ģ�����Ʒ���[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2006, 37(4): 753-758.
QIU Xian-yan, LIU Shao-jun, ZHU Hao, et al. Simulation of self-adjustable fuzzy control in heave compensation system of deep-sea mining[J]. Journal of Central South University: Science and Technology, 2006, 37(4): 753-758.
�ո����ڣ�2007-03-15�������ڣ�2007-05-08
������Ŀ�����ҡ�ʮ�塱�������չר�����������Ŀ(DY105-3-2-2); ������Ȼ��ѧ����������Ŀ(50675226)
����飺������(1972-)��Ů�����ϳ�ɳ�ˣ������ڣ���ʿ�о��������»���Һ�������ۼ���������������о�
ͨ�����ߣ������࣬Ů����ʿ�о������绰��0731-8837904��E-mail: txy@mail.csu.edu.cn
