
DOI: 10.11817/j.issn.1672-7207.2017.02.019
�����Ŵ��㷨��Լ������ɡϵͳ�麽�켣���
�ս�1��������1�������1������ǿ1����Ӧƽ2
(1. �Ͽ���ѧ ���������ƹ���ѧԺ�����300350��
2. �к���ҵ�����װ������˾������ ������441003)
ժ Ҫ��
�������һ���Լ�������ſ������⣬����һ�־��о�Ӣ���Ե��Ŵ��㷨����������⡣Ϊ����ʹ���Ŵ��㷨������Ǿ���B����������Ͽ����ɣ������ſ�������ת��ΪB�������������ƶ���IJ����Ż����⣬����Թ麽�ն˵�ʽԼ���������ɳ����ӽ���ת��Ϊ����ʽԼ�����������þ�̬����������������2�ֲ�ͬ��ʼ�����µĹ�һ��ģ���н��з��棬�����ʵ�ʹ�������½����Ҫ���趨3�ֲ�ͬ���ɳ����ӡ�������������ʹ�ñ��ĵķ���������Ĺ麽�켣���������Ϣ�������Ƿ��Ϲ���ʵ�������һ����Ч������
�ؼ��ʣ�
��ɡϵͳ���麽�켣�Ż����Ŵ��㷨����������Լ���������ɳ�������
��ͼ����ţ�V249��TP13 ���ױ�־�룺A ���±�ţ�1672-7207(2017)02-0404-07
Genetic algorithm based homing trajectory planning of parafoil system with constraints
TAO Jin1, SUN Qinling1, ZHU Erlin1, CHEN Zengqiang1, HE Yingping2
(1. College of Computer and Control Engineering, Nankai University, Tianjin 300071, China;
2. Aerospace Life-Support Industries Ltd, Aviation Industry Corporation of China, Xiangyang 441003, China)
Abstract: Homing trajectory planning of parafoil system is a kind of optimal control problem with constraints, a kind of genetic algorithm with elite strategy to solve such a problem was introduced. For the convenience of using genetic algorithm, the non-uniform B-spline was adopted to characterize the control law, so as to transform the optimal control problem into a control vertices of B-spline basis function optimization problem. In view of homing terminal equality constraints which can be converted into inequality constraints by relaxation factors, a static penalty function method was introduced. The normalized model under two different initial conditions was simulated, and three kinds of relaxation factors were set according to landing accuracy requirements of practical engineering. The simulation results show that the control information of homing trajectory is reasonable, and it is an effective method which is suitable for practical engineering demands.
Key words: parafoil system; homing trajectory planning; genetic algorithm; penalty function; constraints handling; relaxation factor
��ɡϵͳ[1]�麽�켣�����ָ������ʼ���Ŀ��㣬���ض��Ķ���ѧԼ�������ϣ��滮1�������ض�����ָ�������·������ͳ�����Ź麽�켣��Ʒ����ǻ��ڿ����۵��Ż��㷨����Ҫ��Ϊ��ӷ���ֱ�ӷ���
��ӷ���ͨ���ɱ�ַ����������ǽ�ֵԭ���õ�������������������Ź麽�켣���Ƚ��д����Ե��о��ɹ�����ݼ[2]���ü�Сֵԭ�����麽�켣�滮�����ſ�������ת��Ϊ�����ֵ���⣬Ȼ����ù����ݶȷ�������⣻SLEGERS��[3]����ɡϵͳ�麽������(����) �����ſ�������ת���������ֵ������⡣���ڼ�ӷ������̱ȽϷ�������ˣ��ڽ�����ɡϵͳ�麽�켣���ʱ�������ֱ�ӷ�����⡣ֱ�ӷ��ǰѺ�������ָ������ſ�������ת��Ϊ�����Թ滮������й麽�켣��ơ��Ƚ��д����Ե��о��ɹ���ZHANG��[4-5]ʹ�ø�˹α������ɡϵͳ�麽�켣��ɢ����ת��Ϊ����һϵ�д���Լ���Ĵ��ģ�������Ż����⣬���ö��ι滮����������⣻CLEMINSON��[6]���ö�̬�滮������ɡϵͳ�Զ��麽·���������о����������Ǽ�ӷ�����ֱ�ӷ������ڶ��Dz��ô�ͳ�Ļ����ݶȵ�������������ˣ��Գ�ֵʮ�����У��Ż�����ںܴ�̶���ȡ���ڶԳ�ʼֵ�IJ²⣬������������ڹ����ϵ�Ӧ�á������������ż���������ķ�չ��ӿ�ֳ��������͵����ܽ����㷨����Щ�㷨���н�ǿ��³���Ժ㷺����Ӧ�ԣ��Գ�ʼֵ�����У��Ը�Ч��ʵ�õ��ص�������ѧ�߳������ڽ����ɡϵͳ�麽�켣������⡣�Ƚ��д����Ե��о��ɹ���LIU��[7-8]���øĽ�������Ⱥ�㷨Ѱ�ŵõ��˻������ſ��Ƶ���ɡϵͳ�麽�켣�Ľ������Ž⣻������[9]ʹ�û�������Ⱥ�㷨�����ѻ�������ɡ��Ͷ������ϵͳ�켣�����˹滮�����Ϲ�����������������ǽ���ɡϵͳ�麽�켣���������Ϊһ���Ŀ���Ż����⣬ʹ��Ȩ�����ӵķ�������Ŀ���Ż�ת��Ϊ��Ŀ���Ż���Ȼ����е�Ŀ�꺯��Ѱ�ţ��Ż��������������Ȩ�����ӵ�ѡ������������ɡϵͳ�켣�滮���о��ɹ��У�ROSICH��[10]����ɡϵͳ��Ⱥ��麽�Ĺ켣�����ƹ���������о���LUDERS��[11]�����һ�ֻ��ڿ�����չ����������߹滮�㷨����������Ļ��Ƶ�ͼ��ʵ������ɡϵͳ�����¾�ȷ�麽������·�����ɣ�LEE��[12]�����1�������ֵ��Ҷ˹���߹켣�滮������JONATHAN��[13]�����ɡϵͳ�麽���������ܷ�Ӱ������������1��ѡ���Թ켣�滮��ʽ��ȷ�������ٵ�Ԥ���켣���������Ĵ��о�������ͬ���ǣ��������߽���ɡϵͳ�麽�켣����������Ϊһ�����Լ�������ſ������⣬����1�־��о�Ӣ���Ե��Ŵ��㷨���й麽�켣Ѱ�ţ������ͳ������ʼֵ���Թ��Ƶ����⣻����½����ƫ�����������麽ָ����Ϊ����Լ�����Ե�һ�ܺ�Ŀ�꺯�������Ż�����������ɳ����ӵľ�̬������������Լ�����ɳ����ӿ��Ը��ݲ�ͬ����ʵ����������趨�������˼�Ȩ����ѡ������ѣ�Ҳʹ�滮����ɿأ��Ҹ��ӷ��Ϲ���ʵ������
1 ���ſ�����������
��ɡϵͳ�麽�켣�������ı�����һ������ԣ�����״̬Լ��������Լ�����ն�Լ�������ſ������⣬������4��������в�����
1.1 ϵͳ��ѧģ��
��ɡϵͳ����ѧģ���ӣ�������ǿ����϶࣬��ˣ�����ɡϵͳ�麽�켣�滮��ͨ��������Լ��ʵ�ģ�ͣ��Լ��㡣����ͨ��������[14]�е�ȫչ����ɡϵͳ�����ɶ��˶�ģ�ͽ��з��棬������һ���ļ������������ɡϵͳ�ʵ�ģ�͵��˶����̣��������渴�ӵĸ����ɶ�ģ�ͽ��й麽�켣��������ơ�
��ɡϵͳ�ʵ�ģ�麽�켣���ͨ�����÷�����ϵ��������ϵ�и�������ķ�����������ϵһ�£���������ԭ�������������˶����������Խ���Ĵ�С�������Լ�ϵͳ��߶ȵı仯��Ӱ�춼ת������ʼ���λ��ƫ���С�������ɡϵͳ�ķ��п�����ͨ�����ҵ�����������ϲ��Ƶ���ɡ��Ե����IJ�������ʵ�ֵģ������ǵ�����ƫ��������˫����ƫ����������ƫ�����ܹ�ά����ɡϵͳ�ȶ����з�Χ�ڲ���ʱ����ˮƽ�����ٶȺͻ���ȱ仯��С����ˣ��������¼��裬������ģ�ͣ�
1) ����ɡ��������ȫչ�����ȶ�����״̬�£����Դ����ܶȱ仯��������ƫ��������ɡϵͳ�����ٶȵ�Ӱ�죬��Ϊ��ˮƽ�����ٶȺͻ���ȱ��ֲ��䡣
2) ֻ����ˮƽ�糡���ҷ���ͷ�������֪�ģ����Է����ɡϵͳ��̬��Ӱ�졣
3) ϵͳ�Կ����������Ӧ���ӳ١�
��������3����裬�ڷ�����ϵ֮�ϣ�ѡȡĿ���(�趨Ϊ��ɡϵͳ��ʼʵʩȸ����½ʱ�������)Ϊ����ԭ�㣬��ɡϵͳ���˶����̿��Լ�Ϊ
 (1)
(1)
���У�x��y��z�ֱ�Ϊ��ɡϵͳ�ڷ�����ϵX�ᡢY���Z���������Ϣ��vSΪ��ɡϵͳˮƽ�����ٶȣ�vzΪ��ֱ�����ٶȣ���Ϊƫ���ǣ� Ϊƫ�������ʣ�uΪ��������u��ƫ��������(����ɡϵͳ�������ĵ�����ƫ��)����һһ��Ӧ�Ĺ�ϵ��
Ϊƫ�������ʣ�uΪ��������u��ƫ��������(����ɡϵͳ�������ĵ�����ƫ��)����һһ��Ӧ�Ĺ�ϵ��
1.2 �߽�������Ŀ�꼯
���������ļ����������ʵ�ģ�ͣ�����ɡϵͳ�麽�켣��������У���ʼʱ�̡���ʼ״̬��ĩ��ʱ�̡�ĩ��״̬������֪�̶��ġ����߽�������Ŀ�꼯�������¡�
1.2.1 ��ʼ״̬
��ɡϵͳ�麽�ij�ʼʱ��Ϊt0�������ʼ�������Ա���Ϊ
 (2)
(2)
ʽ�У�x0��y0��z0Ϊ��ʼʱ����ɡϵͳ������Ϣ����0Ϊ��ʼʱ��ƫ���ǡ�
1.2.2 �ն�Լ��
��ɡϵͳ�麽����ֹʱ��Ϊtf����tf=z0/vz���ն�״̬���Ա���Ϊ
 (3)
(3)
ʽ�У�xf��yf��zfΪ��½��������Ϣ����windΪˮƽ������½�����wind(tf)���wind��ƫ��Ϊ��(2n+1)�У���Ϊ��֤��ɡϵͳ��½ʱ����硣
1.3 ��������
�������Ʊ�ʾ���£�
 (4)
(4)
ʽ�У���Ϊ��������ȡֵ��ΧΪ[-umax��umax]��umaxΪ�����������������������ɡϵͳ��Сת��뾶���Ӧ��
1.4 ����ָ��
��ɡϵͳ�麽����������������Թ������¡�
1) ��½�����Ŀ������
2) �����½��������ɡϵͳʵʩȸ���ı�Ҫ������ͨ��ȸ�����Լ�С��ɡϵͳ��½ʱ���ٶȣ�������½�����жԻ�����������ˡ�
3) �ܺ��١���Ҫ��麽���ƹ����е�����ĵ�����Խ��Խ�á�
������ɡϵͳ�麽���������������ѡȡ����(3)��С����������Ϊ���ſ�����������ָ�꣺
 (5)
(5)
����1)��2)����Ϊ��ɡϵͳ�麽���ſ�������Լ����������ʾΪ
 (6)
(6)
ʽ�У�Լ������c1(x)=0��ʾ�ն�ʱ����½����Ŀ���ƫ��Ϊ0������Ŀ�����½��c2(x)=0��ʾ��½ʱ�̺���Ǧ�(tf)������windƫ��Ϊ��(2n+1)�У��������½��
����������ɡϵͳ�麽���ſ������������ɲ��֣�����һ���ᷨΪ��������ϵͳ�˶�����(1)��Լ�������£�������������(4)��ȷ��1�����ſ�����u*��ʹϵͳ״̬�ӳ�ʼ״̬(2)ת�Ƶ�Ҫ���Ŀ�꼯��(3)������Լ������(6)����ʹ����ָ��(5)�ﵽ���š�����һ�����Lagrange�����ſ������⣬��һ������Ϊ��ɡϵͳ�麽�������ý��ٵ��ܺ�ʹ���ն�ʱ����½����Ŀ���ƫ����Ҫ��Χ���ҷ��������½���������Ч���Ż�����ģ��Ϊ
 (7)
(7)
2 �����Ŵ��㷨�Ĺ麽�켣���
��������Ĵ���Լ�������ſ������⣬��������о�Ӣ���Ե��Ŵ��㷨���н��㡣���Ƚ���������һ������������������ľ��ȣ�����Ǿ���B�����������п����ɵ������ʵ�ֲ�������Լ���������ô��ɳ����ӵľ�̬�����������д�����
2.1 ��һ������
����ɡϵͳ�麽�켣�Ż������У�����״̬�������������ϴ��ڹ켣���ֵĹ����лᵼ����Чλ������ʧ����һ������������Ч�˷���һ���⣬����㾫�ȡ����⣬�Թ麽�켣���Ż�ҲҪ���Ż����������ܵر�������ͬ���������������´�������
 (8)
(8)
���˶�����ʽ(1)ת��Ϊ
 (9)
(9)
��ʼ״̬ʽ(2)ת��Ϊ
 (10)
(10)
�ն�Լ��ʽ(3)ת��Ϊ
 (11)
(11)
��������ʽ(4)ת��Ϊ
 (12)
(12)
Լ������ʽ(6)ת��Ϊ
 (13)
(13)
��Ч���Ż���������ʽ(7)ת��Ϊ
 (14)
(14)
2.2 ����������
��ɡϵͳ�麽�켣���Ż��ռ��Ƿ����ռ䣬ʹ���Ŵ��㷨����ֱ�ӽ��н��㣬�������Ҫ�����ſ�������ת��Ϊ�����Ż����⡣���õIJ�����������Ҫ��ֱ����ɢ�������ز�����ֵ���ͺ����ƽ���������Ϊ���뼰����ĸ��Ӷȣ����ǵ���ɡϵͳ�����������������ģ����÷Ǿ���B��������[9,15]�ƽ������ʵķ�����ʵ�ֲ��������Ǿ���B����������߶������£�
 (15)
(15)
ʽ�У�diΪ��i�����ƶ��㣻Ni,k(s)Ϊ�ɽڵ�ʸ��s=[s0��s1������sn+k+1]������k��B������������i=0��1������n�������в��õ²���-����˹���Ʒ����õ���k��B������������֧������Ϊ[si��si+k+1]������k+1���ڵ����䣬�ڵ�ʸ��s�ɲ��ù�����-�ֵ¹�ʽ��ȷ�����������������Կ��Ʊ����ǽ��б��롣����ʽ(15)���������ɿ��ƶ���di��nΪ���ƶ���ĸ�����һ�����������Ƶ����Խ�࣬�������Ŀ��ƹ���Խ��ȷ���������ֻ�������Ӧ��������������ѡ��7�����ƶ��㣬������ѡȡ���õ�3�ηǾ���B�������ߡ�
2.3 Լ����������
ʹ���Ŵ��㷨������Ŀ������Ż������Լ���������д�������Ŀǰ��������û�д���Լ����һ���Է�����ͨ���Ĵ��������������ռ����������н�任���ͷ������������ڹ켣�Ż����⣬����������һ����Ч�����������������ɳ����ӽ��ն˵�ʽԼ��ת��Ϊ����ʽԼ������������һ�ּľ�̬�����������д����������ɳ����Ӧ�1�ͦ�2��Լ������ʽ(13)�ɻ�Ϊ
 (16)
(16)
ʽ�У� ��
�� �ֱ�Ϊת����ľ���ƫ��ͷ���ƫ��Լ���������ɳ����ӿɸ��ݹ���ʵ�ʹ麽��½����Ҫ���趨��ʹ����ʽ���Ŵ��ռ��и������Ӧ�Ƚ��е�����
�ֱ�Ϊת����ľ���ƫ��ͷ���ƫ��Լ���������ɳ����ӿɸ��ݹ���ʵ�ʹ麽��½����Ҫ���趨��ʹ����ʽ���Ŵ��ռ��и������Ӧ�Ƚ��е�����
 (17)
(17)
ʽ�У� Ϊ�����������Ӧ�ȣ�
Ϊ�����������Ӧ�ȣ� Ϊԭ��Ӧ�ȣ�P(x)Ϊ�ͷ�������P(x)�ɶ���Ϊ
Ϊԭ��Ӧ�ȣ�P(x)Ϊ�ͷ�������P(x)�ɶ���Ϊ
 (18)
(18)
ʽ�У�k1��k2Ϊ�ͷ�����ϵ������ֵ��ѡȡҪ�������Լ�������IJ�����̶Ⱥͼ���Ч�ʣ����Ե����ͷ������ͷ��ȣ�����ѡȡk1=1��k2=0.3����������֪����x����Լ������ ʱ��
ʱ�� ����x������Լ������ʱʱ��
����x������Լ������ʱʱ�� ��������Ӧ�ͷ���ʹ�ý������������Լ���ķ��������
��������Ӧ�ͷ���ʹ�ý������������Լ���ķ��������
2.4 �Ŵ��㷨���
���IJ���һ�־��о�Ӣ���Ե��Ŵ��㷨��������Լ������ɡϵͳ�麽�켣��Ƶ����ſ�������[16-19]���봫ͳ���Ŵ��㷨��ͬ�����㷨�����뽻���������ĸ����ʾ�Ӵ����ɽ�������ĸ��常���зǾ�Ӣ�������ı�������ֵ��1��0~1�����������õľ�Ӣ������ָ�����еľ�Ӣ����ԭ�ⲻ����ֱ�Ӵ����Ӵ���������������ͱ�����������þ�Ӣ���Ե��������ڣ��ڽ��������У���Ⱥ�е����Ÿ��岻����Ϊѡ����ͱ���������ƻ���ʧ���Ը����Ŵ��㷨������������Ҫ���á�RUDOLPH[19]ʹ��������������Ʒ���֤���˽�����ѡ����ͱ���ľ����Ŵ��㷨��������ȫ�����ţ������о�Ӣ���Ե��Ŵ��㷨��ȫ�������ġ������о�Ӣ���Եľ������Ϊ�������ľ�Ӣ����ֱ���滻�Ӵ�����Ӧ����͵���ͬ��Ŀ�ĸ��壬�Ӷ���֤��Ⱥ��ģ��һ���ԡ�
�����в���ʵ�����룬���뷽�����÷Ǿ���B����������B�����������Ŀ��ƶ��㼴������Ŵ��ռ�Ⱦɫ���ϵĻ�����Ⱥ��ģȡΪ100����Ӣ������ĿȡΪ20����������ȡΪ200������������ȡΪ0.75.
3 �������������
3.1 ��������
��Ϊ����ʵ��������ѡ�ÿ�Ͷ����mw=80 kg��ɡ�ͣ���ɡչ�ұȦ�=1.73��ɡ������Ll=3.7 m����������Lw=0.5 m��ɡ�����Sp=22 m2����ͷ�������������Sw=0.5 m2����װ��f=7�㡣������ѡ��ɡ�ͼ��������ɶȷ��������ڱ�֤��ɡϵͳ��б��С��20���ǰ���£���ɡϵͳ�����˶�����Ϊ����ʼ�ٶ�vs=15 m/s��vz=5 m/s�������������max=30����ɡϵͳ��Ͷ��ʼ�߶�h=2 000 m��
3.2 ������������
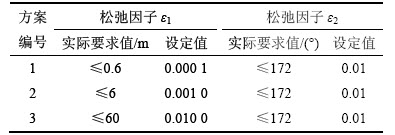
Ϊ��ȫ�������ɡϵͳ�麽�켣����̬�������ص��Լ��ɳ�����ѡ��Թ麽�켣�滮�����Ӱ�죬����ȡ2�ֳ�ʼ�˶�״̬���ֱ�Ϊ��ʼ״̬A��x1(0)=0.5��x2(0)=0��x3(0)=-��/3����ʼ״̬B��x1(0)=0.6��x2(0)=0.6��x3(0)=�У����Ӧ������ϵ��ʵ������λ�÷ֱ�Ϊ��ʼ״̬A��x0=3 000 m��y0=0 m����0=60�㣻��ʼ״̬B��x0=3 600 m��y0=3 600 m����0=180�㡣���ǵ�3�ֹ���ʵ����ɡϵͳ�麽��½�������Ҫ���趨3���ɳ����ӷ��������1��ʾ�����緽��2�麽��½����Ҫ��Ϊ��½�����Ŀ���ƫ����6 m֮�ڣ���½�㷽����ˮƽ����нǴ��ڵ���172�㡣����ʽ(8)��(16)�������㣬�ɳ����Ӧ�1�ͦ�2������Ϊ��

���ñ����ἰ�ķ������ֱ��ڳ�ʼ״̬A��B�£�����3���ɳ������趨����������ɡϵͳ�麽�켣������ƣ�����Matlab�Ͻ��з��������
��1 3���ɳ������趨����
Table 1 Three kinds of relaxation factor setting schemes
ͼ1��ʾΪ����Ӣ���Ե��Ŵ��㷨��������Ӧ��ֵ�������ߡ���ͼ1���Կ������ھ�Ӣ���Ե������£��㷨���ֳ����õ��������ܣ��ڵ�8�������ѻ����ӽ�����ֵ��������Ž��ƽ��CPUʱ��С��2 s��������ɡϵͳʵ�ʹ��̿�������ͼ2��ʾΪ��ɡϵͳ�ڳ�ʼ״̬A�£�����3���ɳ������趨�����Ĺ麽�켣�����Ӧ�������ߡ�ͼ3��ʾΪ��ɡϵͳ�ڳ�ʼ״̬B�£�����3���ɳ������趨�����Ĺ麽�켣�����Ӧ�������ߡ�
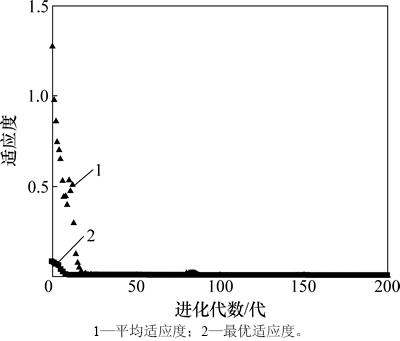
ͼ1 ������Ӧ��ֵ��������
Fig. 1 Fitness value iteration curve
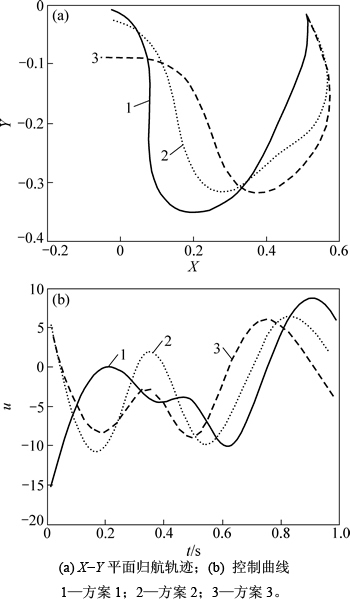
ͼ2 ��ʼ״̬A��3���ɳ������趨ֵ�¹麽�켣
Fig. 2 Homing trajectory of initial state A under three kinds of relaxation factor setting schemes
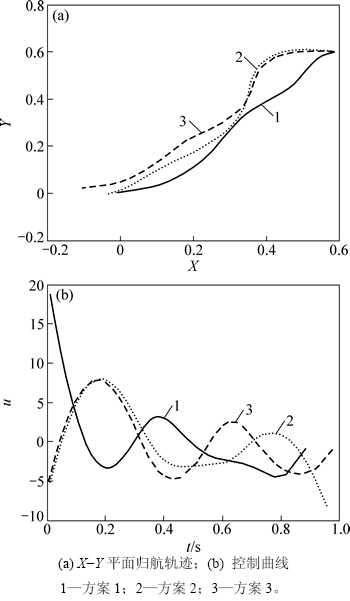
ͼ3 ��ʼ״̬B��3���ɳ������趨ֵ�¹麽�켣
Fig. 3 Homing trajectory of initial state B under three kinds of relaxation factor setting schemes
ͨ��������Եó�����ʼ״̬A��ʼ�����Ŀ���ˮƽ����Ϊ3 000 m������Ŀ�����ԽϽ�����ͼ2(a)�ɼ��������麽�켣�������Ե��ػ�ת��״̬����ҪĿ����ͨ���������߶ȣ��Կ���Ŀ��㡣��ʼ״̬B��ʼ�����Ŀ���ˮƽ����Ϊ5 091 m������Ŀ�����Խ�Զ����ͼ3(a)���Կ����������麽�켣���߽�Ϊƽ��������������������Ӷ�Ӧ�Ŀ�������ͼ2(b)���Կ�������ɡϵͳ���ڻ����ʱ���������Ҳ��Խ�С��
��2����������ɡϵͳ�ڳ�ʼ״̬A��B�·ֱ����3���ɳ������趨���������չ麽������ӱ�2���Կ�������Ȼ��ʼ״̬B����Ŀ���ȳ�ʼ״̬AҪԶ����������ͬ�ɳ������趨�����£���ʼ״̬B�麽�����ܺ�Ҫ���ڳ�ʼ״̬A������������ɡϵͳ�ڳ�ʼ״̬B�麽�����н϶�IJ��û�����У�����������Խ��١�
��2 �麽���
Table 2 Homing results
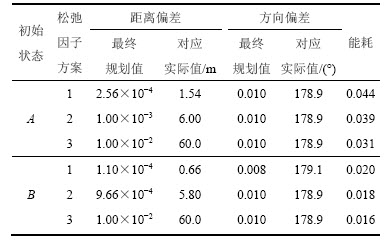
�ӱ�2��֪�����ɳ����ӽϴ�����Լ���Ͽ��ɵ�����£����ʼ����A��B�·���2��3����½����ƫ���½����ƫ���Լ�����1�ķ���ƫ����չ滮�����ȫ���ϲ����ڱ�1���������Ҫ���ɳ����ӽ�С��Լ���ϸ������£��緽��1�ľ���ƫ������Ȼ������ȫ���㹤��ʵ�����Ҫ����Ȼ�ڿɽ��ܵķ�Χ�ڡ�ͨ���Ƚ���ͬ��ʼ������ͬ�ɳ������趨�����¹麽�ܺģ����Եó����Ź麽����Ҫ�ͣ����ɳ����Ӧ�1�����ܺ�Ҳ��Ӧ��С��˵���Ŵ��㷨�ڿ���Լ���������ܹ����������и�Ϊ��������ָ��Ľ⡣
4 ����
1) �����������й�һ��������������������ľ��ȡ�
2) ���÷Ǿ���B����������Ͽ����ɣ����˱��룬����˿����ɵı����������Ӷ�����̬���ſ�������ת���ɾ�̬�����Ż����⡣
3) ����ն˵�ʽԼ���������ɳ����ӽ���ת��Ϊ����ʽԼ���������þ�̬�����������д��������ɳ����ӿɸ��ݹ���ʵ����½�㾫��Ҫ������趨��
4) ����һ�־��о�Ӣ���Ե��Ŵ��㷨����������⣬�Ż�����Գ�ʼֵ�����У����н�ǿ��³���ԡ�
5) ����ķ���������Ĺ麽�켣���������Ϣ�������滮����ɿأ�������Ա����Բ�ͬ����ʵ�ʹ麽�������Ҫ���趨�ɳ����ӣ���ȡ�÷������Ҫ�����ɡϵͳ�麽��������Ϣ���÷���Ϊ�����ɡϵͳ�麽�켣�Ż�������̽������һ����·����
�ο����ף�
[1] �, ���ǻ�, ��ΰ, ��. ��ȷ����麽��ɡ����ϵͳ���о�[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2012, 43(4): 1331-1335.
LI Chun, L Zhihui, HUANG Wei, et al. Guidance navigation & control system for precision fix-point homing parafoil[J]. Journal of Central South University(Science and Technology), 2012, 43(4): 1331-1335.
Zhihui, HUANG Wei, et al. Guidance navigation & control system for precision fix-point homing parafoil[J]. Journal of Central South University(Science and Technology), 2012, 43(4): 1331-1335.
[2] ��ݼ. ��ɡϵͳ����ѧ��麽�����о�[D]. ��ɳ: �����Ƽ���ѧ, 2005: 72-85.
XIONG Jing. Research on the dynamics and homing project of parafoil system[D]. Changsha: National University of Defense Technology, 2005: 72-85.
[3] SLEGERS N, YAKIMENKO O. Optimal control for terminal guidance of autonomous parafoils[C]//20th AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar. Reston, VA, USA: AIAA, 2009: 2958-2978.
[4] ZHANG Limin, GAO Haitao, CHEN Zengqiang, et al. Multi-objective global optimal parafoil homing trajectory optimization via Gauss pseudospectral method[J]. Nonlinear Dynamics, 2013, 72(1/2): 1-8.
[5] �ߺ���, ������, ������, ��. ����α������ɡϵͳ�麽�켣�ݴ����[J]. ����������Ӧ��, 2013, 30(6): 702-708.
GAO Haitao, ZHANG Limin, SUN Qinglin, et al. Fault-tolerance design of homing trajectory for parafoil system based on pseudo-spectral method[J]. Control Theory & Applications, 2013, 30(6): 702-708.
[6] CLEMINSON J R. Path planning for guided parafoils: An alternative dynamic programming formulation[C]//Proceedings of the 22nd AIAA Aerodynamic Decelerator Systems (ADS) Conference. Daytona Beach, FL, USA: AIAA, 2013: 2013-1346.
[7] LIU Zhao, KONG Jianyi. Path planning of parafoil System based on particle swarm optimization[C]//2009 International Conference on Computational Intelligence and Natural Computing. Piscataway, NJ, USA: IEEE, 2009: 450-453.
[8] �콣, �ܵ���. �������ſ��Ƶ���ɡ·���滮[J]. ������ָ�ӿ���, 2010, 35(10): 59-61.
XU Jian, ZHOU Deyun. A path planning of parafoil system based on optimal control[J]. Fire Control and Command Control, 2010, 35(10): 59-61.
[9] ����, ������, ������. ���ڻ�������Ⱥ�Ż��㷨����ɡϵͳ�켣�滮[J]. ����ϵͳ�븴���Կ�ѧ, 2012, 9(1): 47-54.
JIAO Liang, SUN Qinglin, KANG Xiaofeng. Route planning for parafoil system based on chaotic particle swarm optimization[J]. Complex Systems and Complexity Science, 2012, 9(1): 47-54.
[10] ROSICH A, GURFIL P. Couling in-flight trajectory planning and flocking for multiple autonomous parafoils[J]. Journal of Aerospace Engineering, 2012, 226(6): 691-720.
[11] LUDERS B, SUGEL I, HOW J P. Robust Trajectory Planning for Autonomous Parafoils under Wind Uncertainty[C]//Aemerican Institute of Aeronautics and Astronautic Conference. Reston, VA, USA: AIAA, 2013: 1-27.
[12] LEE F, JONATHAN R. B��zier curve path planning for parafoil terminal guidance[C]//Proceedings of the 22nd AIAA Aerodynamic Decelerator Systems(ADS) Conference. Reston, VA, USA: AIAA, 2013: 2013-1325.
[13] JONATHAN R, NATHAN S. Robust parafoil terminal guidance using massively parallel processing. Journal of Guidance[J]. Control and Dynamics, 2013, 36(5): 1336-1345.
[14] JIAO Liang, SUN Qinglin, KANG Xiaofeng, et al. Autonomous Homing of Parafoil and Payload System Based on ADRC[J]. Journal of Control Engineering and Applied Informatics, 2011, 13(3): 25-31.
[15] BELAIDI H, HENTOUT A, BOUZOUIA B, et al. NURBS trajectory generation and following by an autonomous mobile robot navigating in 3D environment[C]//2014 IEEE 4th Annual International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER). Pisctaway, NJ, USA: IEEE, 2014: 168-173.
[16] ����, ³��Ψ, ���·�. ������ϵ�ɿ��ȵĸ������ṹ�Ż����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2014, 45(10): 3629-3636.
LIU Yang, LU Naiwei, YIN Xinfeng. Structural optimization design of steel truss beam based onsystem reliability[J]. Journal of Central South University (Science and Technology), 2014, 45(10): 1331-1335.
[17] ����, ̷����, ����. ���������Ŵ��㷨���ƶ�������ʵʱ����·���滮[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2008, 39(3): 577-583.
CHEN Xi, TAN Guanzheng, JIANG Bin. Real-time optimal path planning for mobile robots based on immune genetic algorithm[J]. Journal of Central South University (Science and Technology), 2008, 39(3): 577-583.
[18] ��Ӣ��, ������. �Ŵ��㷨�����估Ӧ��[M]. ����: �������ӿƼ���ѧ������, 2014: 143-223.
LEI Yingjie, ZHANG Shanwen. Genetic algorithm toolbox and its application[M]. Xi��an: Xi��an University of Electronic Science and Technology Press, 2014: 143-223.
[19] RUDOLPH G. Convergence analysis of canonical genetic algorithms[J]. IEEE Trans on Neural Networks, 1994, 5(1): 96-101.
(�༭ �°���)
�ո����ڣ�2016-04-11�������ڣ�2016-06-29
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(61273138)��������ص����������Ŀ(14JC2DJC39300)(Project(61273138) supported by the National Natural Science Foundation of China; Project(14JC2DJC39300) supported by the Key Fund of Tianjin Municipal)
ͨ�����ߣ������֣����ڣ���ʿ����ʦ����ʿ����������Ӧ���ơ�Ƕ��ʽ����ϵͳ���������˻��������Ƶ��Ϳ��Ƶȷ�����о���E-mail��sunql@nankai.edu.cn
ժҪ����ɡϵͳ�麽�켣�����һ���Լ�������ſ������⣬����һ�־��о�Ӣ���Ե��Ŵ��㷨����������⡣Ϊ����ʹ���Ŵ��㷨������Ǿ���B����������Ͽ����ɣ������ſ�������ת��ΪB�������������ƶ���IJ����Ż����⣬����Թ麽�ն˵�ʽԼ���������ɳ����ӽ���ת��Ϊ����ʽԼ�����������þ�̬����������������2�ֲ�ͬ��ʼ�����µĹ�һ��ģ���н��з��棬�����ʵ�ʹ�������½����Ҫ���趨3�ֲ�ͬ���ɳ����ӡ�������������ʹ�ñ��ĵķ���������Ĺ麽�켣���������Ϣ�������Ƿ��Ϲ���ʵ�������һ����Ч������
[1] �, ���ǻ�, ��ΰ, ��. ��ȷ����麽��ɡ����ϵͳ���о�[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2012, 43(4): 1331-1335.
[2] ��ݼ. ��ɡϵͳ����ѧ��麽�����о�[D]. ��ɳ: �����Ƽ���ѧ, 2005: 72-85.
[5] �ߺ���, ������, ������, ��. ����α������ɡϵͳ�麽�켣�ݴ����[J]. ����������Ӧ��, 2013, 30(6): 702-708.
[8] �콣, �ܵ���. �������ſ��Ƶ���ɡ·���滮[J]. ������ָ�ӿ���, 2010, 35(10): 59-61.
[9] ����, ������, ������. ���ڻ�������Ⱥ�Ż��㷨����ɡϵͳ�켣�滮[J]. ����ϵͳ�븴���Կ�ѧ, 2012, 9(1): 47-54.
[16] ����, ³��Ψ, ���·�. ������ϵ�ɿ��ȵĸ������ṹ�Ż����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2014, 45(10): 3629-3636.
[18] ��Ӣ��, ������. �Ŵ��㷨�����估Ӧ��[M]. ����: �������ӿƼ���ѧ������, 2014: 143-223.
