
�ǽṹ�����������������켣�滮����
����������С��������ƽ���غ���
(������ѧ������ѧ ���繤�����Զ���ѧԺ������ ��ɳ��410073)
ժ Ҫ��
���µ���������������Ϊ������еĹ켣�滮���⣬���һ�ֻ��ڳ�ʼ״̬��Ŀ��״̬Լ����Բ��ƴ�ӷ������ڴ˻����Ͽ����ϰ���Լ�����������϶��µ�ϸ�ַ���ʵ�ֶ��Բ�������ӣ��õ����еĹ켣ϵ�С����ڱ�����������Ż�ָ��Թ켣ϵ�н������ۣ��õ��ʺϳ����˶��������켣������������õ��Ĺ켣���й⻬���������ԣ��ʺϳ���ʵ�ʿ��ơ��÷������ںϳ������˶����ԣ�ͬʱ����������ʻ��ʵʱ�������ʺ�ʵ�ʳ�����������Ӧ�á�
�ؼ��ʣ�
�����������켣�滮��״̬Լ�������Ź켣��
��ͼ����ţ�TP273 ���ױ�־�룺A ���±�ţ�1672-7207(2011)11-3377-07
Trajectory planning for autonomous driving in unstructured environments
CHEN Qing-yang, ZHANG Xiao-bo, SUN Zhen-ping, HE Han-gen
(College of Mechatronic Engineering and Automation, National University of Defence Technology,
Changsha 410073, China)
Abstract: To resolve this question of trajectory planning for autonomous land vehicle in unstructured environments, a novel algorithm for a feasible trajectory was proposed. Considering the obstacle restriction in real environments, an up-down decomposing method was proposed, resulting in a series of feasible trajectory. Based on a proposed optimization function, an optimal trajectory was gotten for the real vehicle driving. The results show that the proposed algorithm can solve the restrictions of the initial state and the final state of the vehicle, get a smoothed trajectory, which is suitable for vehicle driving. The proposed method can meet the need of autonomous land vehicle when driving in unstructured environments.
Key words: autonomous driving; trajectory planning; restriction of state; optimal trajectory
�ڵ�����Ϣ����ᣬ��Ϊһ�������Զ��������ܻ�ˮƽ�ߵ͵ĵ��ʹ�����������ʻ�������о��ܵ���ǰ��δ�еĹ�ע�����������������͵¹��ȣ���Ͷ���˴������������������о�[1-3]�����ǵ�ĿǰΪֹ��ص��о��Բ��ܺܺõؽ���ǽṹ�������³������������������켣�滮��Ϊ���еĹؼ����֣����Ǵ��������������д����[4-6]������ǽṹ������������Ҫ���ص���ǻ����ĸ����Լ��㷺���ڵIJ�ȷ���ԡ������Ǹ�֪ϵͳ�����Ƕ�λϵͳ������Ϊ�켣�滮�ṩȷ����Ϣ�����ܴ��ڵĶ�̬�ϰ���Թ켣�滮Ҳ����˾����ս����һ���棬����ʵ�ʳ���������ʻ�Ĺ켣�滮�������˶�����ѧԼ����ʵʱ��֮���ì�ܸ�����Լ�ų������ܼ�ʻϵͳ�ķ�չ������Ŀǰ���Ƕ���һ��������˺ܶ��о�������������д�����뷨�����ڼ��ٶȿռ�Ի������˶����б�����Ŀ����ٹ滮[7]��Qu��[8-11]������Ķ���ʽ����ֵ�����������Ľ���A*�����㷨[12]��Bottasso��[13-14]������Ĺ켣ԭ�ӷ�����Flores��[15]���������ƽ̹�ȣ���Щ���������ƶ������˵��˶��滮�о����˾���ƶ����ã��������ʵ�ʳ����˶����̣�ʵʱ������һ�����Խ�������⡣�������߶Էǽṹ�������µ�������ʻ�����켣�滮���������һ���ںϳ����˶����ԵĹ켣�滮���������Ľ�ʵ��һ������Լ���µĿ��й켣���ɷ�������������ʾ�÷����õ��Ĺ켣���й⻬���������ԣ����ϳ���ʵ���˶����ԣ��ڴ˻����ϣ��������߽�����ʵ�ʳ���������ʻ�г�ʼ״̬��Ŀ��״̬���ϰ���Լ����ʵ�ֻ������еij�ʼ�켣ϵ�У�����ڱ�����������Ż�ָ��Թ켣ϵ�н������ۣ��õ�һ���ʺϳ����˶��������켣��
1 ����Լ���¿��й켣���ɷ���
���Ƚ��ܱ�����Ҫ���õ�����Լ���¿��й켣���ɷ�������������н�ģ����ͼ1��ʾ���ڲο�����ϵXOY�У�Ϊ�������ʾ�������ʼ״̬��λ��O�㣬Ŀ��״̬λ��O��(�����ͨ��һ����ƽ������ת����ʵ��)����Ա���Ҫ�о������������켣�滮���⣬O���״̬��ʾΪO(0, 0, 90)�����У�90�����˲ο�����ϵ�³������������ļнǣ�O����״̬��ʾΪO�� (x, y,![]() )��
)��![]() ����������ϵ��Ŀ��㷽�������ļнǣ��㷨�������ʼ״̬O��Ŀ��״̬O��Լ���¿��й켣��ʵ�֡�
����������ϵ��Ŀ��㷽�������ļнǣ��㷨�������ʼ״̬O��Ŀ��״̬O��Լ���¿��й켣��ʵ�֡�
����˼�룺�ɼ���֪ʶ��֪������һ�ι̶����ʵ�Բ��ͬʱ�����ʼ״̬��Ŀ��״̬Լ�����ڴ�������Dz�����ʵ�ֵġ���ˣ����IJ���һ�ֽ����ƽ����㷨��ʵ�ֻ�������������Լ���Ŀ��н⡣���ȣ����Ľ�Ŀ��״̬��Լ������ΪO��(x, y)���ɼ���֪ʶ��֪����һ�ι⻬��Բ����ͬʱ�����ʼ״̬������Ŀ��״̬��Լ�������������ʽ(1)~(3)(������ֻ�о�Ŀ���λ�ڵ�һ�������������״̬����ȵõ�)��
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
ʽ�У�![]() Ϊ
Ϊ![]() ���������ļнǣ�
���������ļнǣ�![]() Ϊ
Ϊ![]() ���ߵľ��룻(xc, yc)ΪԲ���ϵ�һ��������c�����ꣻ��cΪ�����������ļнǡ�
���ߵľ��룻(xc, yc)ΪԲ���ϵ�һ��������c�����ꣻ��cΪ�����������ļнǡ�
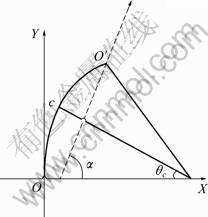
ͼ1 ����Լ����ģ��ʾ
Fig.1 Model of two-point constraints
ͬ���ģ���Ŀ��״̬�������ij�ʼ״̬Լ���£��������������ɵõ�һ�ι̶����ʵ�Բ������2��Բ���Ͼ��Ȳ������ɵõ���Ӧ�ĵ��(xc, yc)��(![]() )������ʽ(4)��ʵ��2��Բ���Ľ������ɡ�
)������ʽ(4)��ʵ��2��Բ���Ľ������ɡ�
![]() (4)
(4)
ʵ����ȡ![]() ��
��![]() ��iΪԲ���ϵIJ�������ţ�MΪ������������㷨�õ��ķ�������ͼ2��ʾ��ͼ2(a)�й켣1Ϊ���ڳ�ʼ״̬������Ŀ��״̬���õ��Ŀ��й켣���켣2Ϊ����Ŀ��״̬��������ʼ״̬���õ��Ŀ��й켣����ͼ�еĺϳɹ켣���ǻ���ʽ(4)���õ��Ľ������ɹ켣����ͼ2(b)����Ӧ�ĺϳɹ켣���ʿ��Կ������õ��ĺϳɹ켣���й⻬���������ԣ�����ʵ�ʳ������˶����ԡ�
��iΪԲ���ϵIJ�������ţ�MΪ������������㷨�õ��ķ�������ͼ2��ʾ��ͼ2(a)�й켣1Ϊ���ڳ�ʼ״̬������Ŀ��״̬���õ��Ŀ��й켣���켣2Ϊ����Ŀ��״̬��������ʼ״̬���õ��Ŀ��й켣����ͼ�еĺϳɹ켣���ǻ���ʽ(4)���õ��Ľ������ɹ켣����ͼ2(b)����Ӧ�ĺϳɹ켣���ʿ��Կ������õ��ĺϳɹ켣���й⻬���������ԣ�����ʵ�ʳ������˶����ԡ�
2 ��ʼ�켣ϵ�����ɷ���
��ǰһ��������������Լ���³������й켣�����ɷ������ڴ˻����ϣ�������ʵ�ʷǽṹ�������³������������������������ʵʱ��Ҫ��Ĺ켣�滮���������ȱ������߽���ǰ���㷨�Ļ����ϣ��ڳ�ʼ״̬��Ŀ��״̬���ϰ���Լ����ʵ�ֻ������еij�ʼ�켣ϵ�С�
2.1 ��ʼ״̬��Ŀ��״̬Լ��
���ڳ�ʼ״̬��Ŀ��״̬�Թ켣����Լ��������Ҫʵ�ֵ��ǹ滮����ϵ�Ľ���������״̬��Ŀ��״̬�ڹ滮����ϵ�е�ͶӰ��Ϊ��ʵ�ֶ��ϰ����ȷ��ʾ�����Ľ�����ͼ3��ʾ�Ĺ滮�ο�����ϵXVY��ͼ3�г���λ������ϵԭ��V����Ŀ��״̬����һ����ƽ������ת����λ��Y���ϵ�ijһ�㡣��˵�����ϵ��ʾ�������ɸ�ȷ��ʵ���ϰ�������ͱ�ʾ�복���ڹ滮�����µ��ʵ��ʾ����ͼ3�У��滮����ϵ�µij�����λ����ͼ��V�㴦��ͷ��ʾ����Ŀ�귽����ΪT�㴦��ͷ��ʾ����ͼ3�к�ɫ��״�����ʾ���dz�����װ������ʵ�ʸ�֪���IJ���ͨ���������潫���۱��������ܵķ�����ʵ�ʳ��������е�Ӧ�á���ͼ3(a)�У��ɳ�������λ��V�����������(��Ϊͼ3��V����ͷ��ָ����)�����������Ŀ��״̬Լ��T����Ŀ���T��λ�ã��ɵõ��̶����ʵ�Բ���켣1����![]() �����Ƶأ���������Ŀ��״̬T��������ʼ״̬Լ������V��λ�ã��ɵõ��̶����ʵ�Բ���켣2����
�����Ƶأ���������Ŀ��״̬T��������ʼ״̬Լ������V��λ�ã��ɵõ��̶����ʵ�Բ���켣2����![]() ���ڴ˻����ϣ�����ǰ�������ܵ�����Բ���������ɵķ�������ʵ�ֿ��еij�ʼ�켣����Ϊͼ3�кϳɹ켣�����������ߡ���ͼ3�кϳɹ켣������ͼ���Կ������ϳɹ켣�����ʹ⻬���ɣ��ʺ���ʵ�ʵij������ơ�
���ڴ˻����ϣ�����ǰ�������ܵ�����Բ���������ɵķ�������ʵ�ֿ��еij�ʼ�켣����Ϊͼ3�кϳɹ켣�����������ߡ���ͼ3�кϳɹ켣������ͼ���Կ������ϳɹ켣�����ʹ⻬���ɣ��ʺ���ʵ�ʵij������ơ�
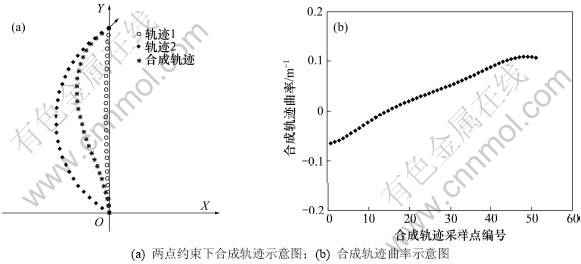
ͼ2 ����Լ���¹켣�����㷨������
Fig.2 Simulation results of proposed algorithm under two-point constraints
2.2 �ϰ���Լ��
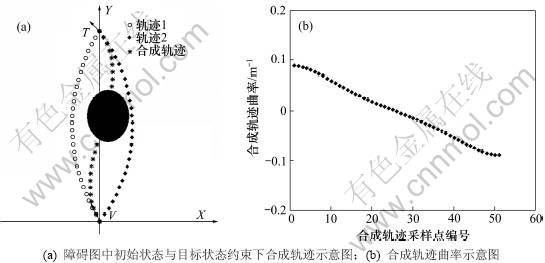
��ǰ�����ᵽ�ķ�����õĻ��ڳ�ʼ״̬��Ŀ��״̬Լ���Ļ������й켣����ijЩ����²����ǰ�ȫ���еġ�ͼ4��ʾΪʵ��ʵ�������������һ֡�滮����ʱͼ�п��еĺϳɹ켣�������ɫ����ͨ���������ص�����ˣ����õ��ĺϳɹ켣ʵ�����Dz����еġ������ǰ�������Ļ����������ϰ�Լ��������DZ���Ҫ��������⡣
���ǰ�������ܵ�����Լ���¿��й켣�����㷨�����Ľ�����һ�ֶ�ֱ���ϸ�ֵķ���������켣�ı������⡣����ͼ4��ʾ�ij����������ڵ�ǰʵ�ֵĻ������й켣�ϵ�k��·�������ϰ������ײ�����ڵ�k��Ļ����ϰ�ʽ(5)������Ӧ��ƽ�Ʊ任�������ɻ��һϵ�в����ϰ������ĺ�ѡ�ֲ�Ŀ���k1, k2, k3, ��, kn��
 (5)
(5)
��һϵ�к�ѡĿ���Ļ����ϣ�ͬ���أ���������Լ���¿��й켣���ɷ������ɷֱ����ɳ�ʼ״̬����ѡ�ֲ�Ŀ��״̬Լ���Ŀ��й켣![]() ����ѡĿ��״̬��Ŀ��״̬Լ���Ŀ��й켣
����ѡĿ��״̬��Ŀ��״̬Լ���Ŀ��й켣 ![]() �������ں�ѡ�ֲ�Ŀ��㴦ͬʱ�����˸õ�ķ������ԣ���ˣ���
�������ں�ѡ�ֲ�Ŀ��㴦ͬʱ�����˸õ�ķ������ԣ���ˣ���![]() ��
��![]() ���Ӷ��ɵ�����
���Ӷ��ɵ�����![]() Ҳ��һ�����еĹ滮�켣������ʵ������ͼ5(a)�еĵ���������ϵ�����ߡ���ͼ5(b)���Կ������õ��ĺϳɹ켣������ͼ4�кϳɹ켣������ȣ����ܾ��нϴ�����䣬��������ƽ�����ɵģ�����ʵ�ʳ����Ŀ�����ζ���Խϵ͵��ٶ���ʻ������ԭʼ�ϰ�ͼ�еij�������һ�µġ�
Ҳ��һ�����еĹ滮�켣������ʵ������ͼ5(a)�еĵ���������ϵ�����ߡ���ͼ5(b)���Կ������õ��ĺϳɹ켣������ͼ4�кϳɹ켣������ȣ����ܾ��нϴ�����䣬��������ƽ�����ɵģ�����ʵ�ʳ����Ŀ�����ζ���Խϵ͵��ٶ���ʻ������ԭʼ�ϰ�ͼ�еij�������һ�µġ�
��Ȼ��������![]() �ϣ�ͬ�����ܴ����벻��ͨ�������ص���·���㣬�������ƵĹ켣ϸ�������ɷ��������տɵõ�һϵ�л������еij�ʼ�켣������ʵ�ʳ�����ʻ�������ܵ���������������Լ��������Сת��뾶�ȣ���ʵ�ʾֲ��ĸ�֪��ͼ�ڻ�������ϸ�ֱ�ɵõ������ϰ�����ص��Ĺ켣ϵ�У���ˣ��켣�Ա������ƽ���Ĺ������ԡ��ڵõ���һϵ�л������й켣�Ļ����ϣ�����һ�����Ż�Ŀ��Թ켣ϵ�н������ۣ��õ����Ż�ָ���µ����ſ��й켣��
�ϣ�ͬ�����ܴ����벻��ͨ�������ص���·���㣬�������ƵĹ켣ϸ�������ɷ��������տɵõ�һϵ�л������еij�ʼ�켣������ʵ�ʳ�����ʻ�������ܵ���������������Լ��������Сת��뾶�ȣ���ʵ�ʾֲ��ĸ�֪��ͼ�ڻ�������ϸ�ֱ�ɵõ������ϰ�����ص��Ĺ켣ϵ�У���ˣ��켣�Ա������ƽ���Ĺ������ԡ��ڵõ���һϵ�л������й켣�Ļ����ϣ�����һ�����Ż�Ŀ��Թ켣ϵ�н������ۣ��õ����Ż�ָ���µ����ſ��й켣��
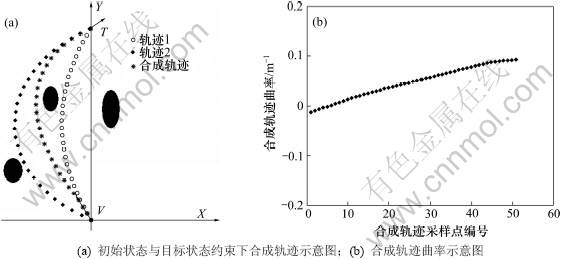
ͼ3 �����������Ĺ滮����ϵ����ʼ״̬��Ŀ��״̬Լ���µõ��Ľ��
Fig.3 Representation of proposed planning frame and results under constraint of initial-final state
ͼ4 ʵ��ʵ����������һ֡�滮����
Fig.4 Example in real vehicle experiments
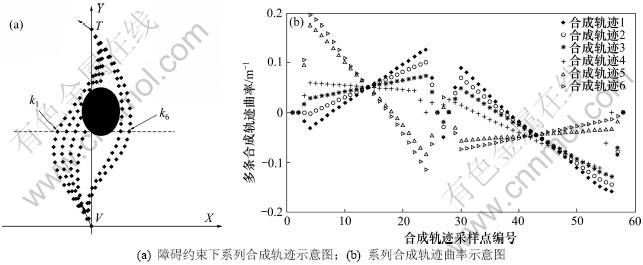
ͼ5 �ϰ�Լ����ϵ�й켣���ɽ��
Fig.5 Series of trajectories generation with obstacle constraints
3 ���ſ��й켣
��ǰ������ϸ�����˻������й켣ϵ�е�ʵ�֣��ڴ˹켣ϵ�еĻ����ϣ�������һ�����Ż�ָ��Թ켣ϵ�н������ۣ��õ����ŵĿ��й켣����֤�����Խϸߵ��ٶȰ�ȫ��ʻ��
���ȣ����������������˶�����ȫ���ǵ�һλ�ġ����ڹ켣�滮��˵����Ҫ��滮�Ĺ켣�ڱ�֤�����ԵĻ����ϱ������ϰ����㹻Զ���Ա������ڸ�֪���滮�����ƵȻ��������ڵ���������DZ��Σ���ԡ���ǰ����ܵĹ켣ϵ�еĻ����ϣ�����ijһ�켣�ϵIJ�����p(x, y)���ڸ�֪��ͼ�ڶ����ڽ�����Q(p(x, y), D)(��p(x, y)ΪԲ�ģ���DΪ�뾶��Բ����)�����ϰ�������жϡ�������Q(p(x, y), D)���������ϰ��ھ���d���ཻ����ɵõ��õ�İ�ȫ����d(x, y)�������䰲ȫ�����ΪD���ڴ˻����ϣ�����켣�İ�ȫָ��Ϊ��
![]() (6)
(6)
��Ҫָ�����ǣ�ʽ(6)�е�DΪ���ڸ�֪���滮�����Ƶȸ�������������������С��ȫ���룬![]() Ϊijһ�滮�켣�����в��������С��ȫ���룬
Ϊijһ�滮�켣�����в��������С��ȫ���룬![]() Ϊ����0�Ľ�Сʵ����������������ȫ����֮��Ĺ滮�켣���г���ȫ����Ϊ���Խ��ܵĽ�Сֵ�����ڸð�ȫָ�꣬���Ź켣Ϊ�켣ϵ���ж�Ӧ��
Ϊ����0�Ľ�Сʵ����������������ȫ����֮��Ĺ滮�켣���г���ȫ����Ϊ���Խ��ܵĽ�Сֵ�����ڸð�ȫָ�꣬���Ź켣Ϊ�켣ϵ���ж�Ӧ��![]() �Ŀ��й켣��
�Ŀ��й켣��
�ڱ�֤��ȫ���еĻ����ϣ����ڹ滮�켣ʵ�ֳ���������Ȼ�������������Խϸߵ��ٶ���ʻ������ʵ�ʳ�����˵�������ܵ����ּ����������������ƣ���Լ�˳������Ź滮�켣��ʻ������������ٶȡ���ʽ(7)��֪���ڹ̶���ת��뾶�����������ʵĻ����ϣ���������ʻ�ٶȱ���������������ٶ�Լ�����������IJ���Ħ�����������ṩ����ת��������������������ܲ�������������ڳ������˶�������˵�Ƿdz������ġ�
 (7)
(7)
ʽ�У�vΪ�����ٶȣ�rΪ�켣����Ӧ���ʣ�amaxΪʵ�ʳ����˶���������������ٶȣ�rminΪ���ڳ�����������������������Сת��뾶��
��ˣ�Ϊ����߳�������ʻ�ٶȣ����Ķ���켣��Ч��ָ��Ϊ��
![]() (8)
(8)
ʽ�У�![]() Ϊijһ�滮�켣�ϵ����ʾ�ֵ��
Ϊijһ�滮�켣�ϵ����ʾ�ֵ��![]() Ϊ�滮�켣�����ʷ��
Ϊ�滮�켣�����ʷ��![]() ΪЭ������֮���ϵ��Ȩֵ����ָ���ڿ��ǹ滮�켣��ƽ�����ʵĻ����ϣ�ͬʱ�����ʷ������Լ������֤�����켣�Ĺ⻬���ԣ��Ϻõ������˳�����ʻ�����ԶԹ滮�켣��Լ�������ڸ�ָ������Ź켣��Ϊ�켣ϵ����ʵ��
ΪЭ������֮���ϵ��Ȩֵ����ָ���ڿ��ǹ滮�켣��ƽ�����ʵĻ����ϣ�ͬʱ�����ʷ������Լ������֤�����켣�Ĺ⻬���ԣ��Ϻõ������˳�����ʻ�����ԶԹ滮�켣��Լ�������ڸ�ָ������Ź켣��Ϊ�켣ϵ����ʵ��![]() ����Ӧ�켣���ڸ�ָ��Ļ����ϣ�Ϊ������ʵ�ʳ������������ƣ���������ʽ(9)�е�������
����Ӧ�켣���ڸ�ָ��Ļ����ϣ�Ϊ������ʵ�ʳ������������ƣ���������ʽ(9)�е�������
 (9)
(9)
ʽ�У�![]() Ϊ����ǰ�ְڽǣ�
Ϊ����ǰ�ְڽǣ�![]() Ϊǰ�ְڽ�ת�١�
Ϊǰ�ְڽ�ת�١�
���ǰ������ۣ�����ʵ�������������˶������ĸ��������µ��Ż�ָ�꣺
![]() (10)
(10)
���У�w1��w2Ϊ��Ӧ��ȫ����Ч��ָ���Ȩֵϵ����ʵ������֮��Ϻõ����У���֤�ڸ�������¶��ܵõ����ŵĹ켣��
4 ʵ����
���ڱ�����������ںϳ����˶����ԵĹ켣�滮���������߽����˴�����ʵ��ʵ�飬ʵ���������Ҫ�Ǹ��ӷǽṹ������������ʵ�鳡����ʵ������ͼ6��ʾ����ʵ�����а�ɫ�Ŀ�״�����ʾ�����ϰ����ɫ����������������Ϊʵ�ʹ滮�Ĺ켣���ڸù滮�����ָ���£�ʵ�鳵���ɽϺõ���ɹ켣�����밲ȫ��������ֵ�ٶȿɽӽ�30 km/h������Ҫ���ǣ���ʵ�ʲ��Թ����У��켣�滮������100 ms���ڣ�����ʵ�ʳ���������ʻ�����������ܼ�ʻ������ʵ��Ӧ�þ��о���ƶ����á�
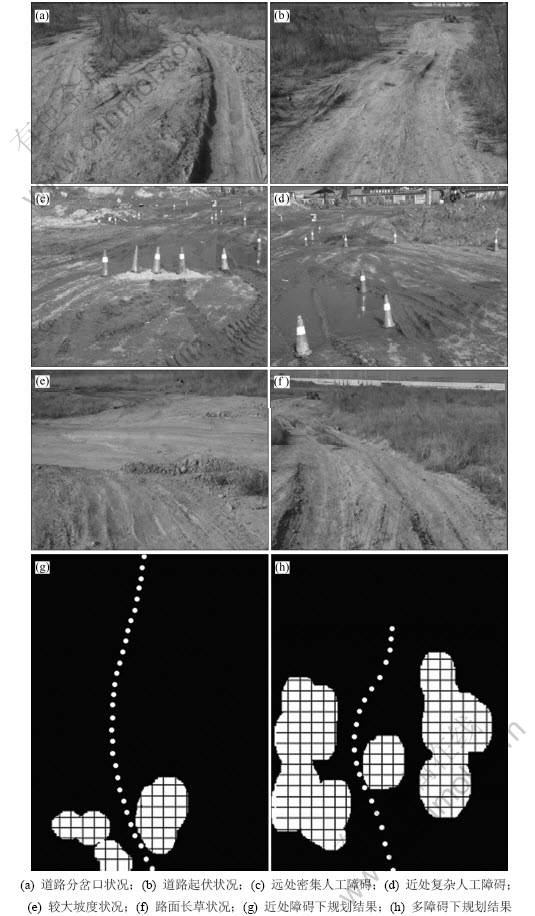
ͼ6 ʵ��ʵ�黷����ʵ����
Fig.6 Experimental environments and results
5 ����
(1) ��Էǽṹ�����������������켣�滮���⣬�������һ������Լ���¿��й켣�����㷨�����㷨�õ��Ĺ켣���й⻬���������ԣ����ϳ���ʵ���˶����ԡ��ڴ˻����ϣ��ۺϿ��dz�����ʼ״̬��Ŀ��״̬���ϰ���Լ����ʵ�ֻ������еij�ʼ�켣ϵ�С����Ϊ�˱�֤����������ȫ����ٵ��˶�������������Ż�ָ�꣬�Թ켣ϵ�н������ۣ��Ӷ��õ�����������켣���ڳ������ơ�
(2) ʵ��������÷������㳵������������ʵʱ������ͬʱ�����˳����˶����ԣ��ڷǽṹ���������ܽϺõ�ʵ�ֹ켣��������ϵȹ��ܣ��ʺϸ��ӻ��������ܳ�����������Ӧ�á�
�ο����ף�
[1] Montemerlo M, Becker J, Shat S, et al. Junior: The stanford entry in the urban challenge[J]. Journal of Field Robotics, 2008, 25(9): 569-597.
[2] Kammel S, Ziegler J, Pitzer B, et al. Team AnnieWAY��s autonomous system for the 2007 DARPA Urban Challenge[J]. Journal of Field Robotics, 2008, 25(9): 615-639.
[3] Bacha A, Bauman C, Faruque R, et al. Odin: Team VictorTango��s entry in the DARPA Urban Challenge[J]. Journal of Field Robotics, 2008, 25(8): 467-492.
[4] ������, �غ���, �º�. δ֪�������ƶ������˵��������о�����������[J]. ���������, 2002, 17(4): 385-390.
CAI Zi-xing, HE Han-gen, CHEN Hong. Some issues for mobile robots navigation under unknown environments[J]. Control and Decision, 2002, 17(4): 385-390.
[5] John J L. Challenges for autonomous mobile robots[C]// Proceedings of International Machine Vision and Image Processing Conference. Maynooth: Inst of Elec and Elec Eng Computer Society, 2007: 4.
[6] ������, �غ���, �º�. δ֪�������ƶ������˵������������뷽��[M]. ����: ��ѧ������, 2009: 1-7.
CAI Zi-xing, HE Han-gen, CHEN Hong. Theory and methods for mobile robots navigation under unknown environments[M]. Beijing: Science Press, 2009: 1-7.
[7] ZU Di, HAN Jian-da, TAN Da-long. Acceleration space LP for the path planning of dynamic target pursuit and obstacle avoidance[C]//Proceedings of the World Congress on Intelligent Control and Automation (WCICA). Dalian: Institute of Electrical and Electronics Engineers Inc, 2006: 9084-9088.
[8] QU Zhi-hua, WANG Jing, Plaisted C E. A new analytical solution to mobile robot trajectory generation in the presence of moving obstacles[J]. IEEE Transactions on Robotics, 2004, 20(6): 978-993.
[9] Park S H, Lee B H. A new analytical representation to robot path generation with collision avoidance through the use of the collision map[J]. International Journal of Control, Automation and Systems, 2006, 4(1): 77-86.
[10] Nagy B, Kelly A. Trajectory Generation for Car-like Robots using Cubic Curvature Polynomials[C]//Proceedings of International Conference on Field and Service Robotics. Helsinki, 2001: 731-736.
[11] Thompson S, Kagami S. Continuous curvature trajectory generation with obstacle avoidance for car-like robots[C]// Proceedings of International Conference on Computational Intelligence for Modelling, Control and Automation, and International Conference on Intelligent Agents, Web Technologies and Internet. Vienna: Inst of Elec and Elec Eng Computer Society, 2005: 863-870.
[12] Likhachev M, Ferguson D. Planning long dynamically feasible maneuvers for autonomous vehicles[J]. International Journal of Robotics Research, 2009, 28(8): 933-945.
[13] Bottasso C L, Leonello D, Savini B. Path planning for autonomous vehicles by trajectory smoothing using motion primitives[J]. IEEE Transactions on Control Systems Technology, 2008, 16(6): 1152-1168.
[14] ����. ���ڹ켣Ƭ�ε��˶��滮�������������������е�Ӧ��[D]. ��ɳ: ������ѧ������ѧ�о���Ժ, 2006: 11-24.
CHEN Yang. Motion planning method based on trajectory primitives and its applications in autonomous land vehicles[D]. Changsha: National University of Defense Technology. Graduate School, 2006: 11-24.
[15] Flores M E, Milam M B. Trajectory generation for differentially flat systems via NURBS basis functions with obstacle avoidance[C]//Proceedings of the American Control Conference. Minneapolis: Institute of Electrical and Electronics Engineers Inc, 2006: 5769-5775.
(�༭ �°���)
�ո����ڣ�2010-11-20�������ڣ�2011-03-05
������Ŀ��������Ȼ��ѧ�����ص�������Ŀ(90820302, 60774076)
ͨ�����ߣ�������(1982-)���У����������ˣ���ʿ�о������������ܳ�����ʻ�����о����绰��15173115173��E-mail: chy1982_008@hotmail.com
ժҪ������ǽṹ�������µ���������������Ϊ������еĹ켣�滮���⣬���һ�ֻ��ڳ�ʼ״̬��Ŀ��״̬Լ����Բ��ƴ�ӷ������ڴ˻����Ͽ����ϰ���Լ�����������϶��µ�ϸ�ַ���ʵ�ֶ��Բ�������ӣ��õ����еĹ켣ϵ�С����ڱ�����������Ż�ָ��Թ켣ϵ�н������ۣ��õ��ʺϳ����˶��������켣������������õ��Ĺ켣���й⻬���������ԣ��ʺϳ���ʵ�ʿ��ơ��÷������ںϳ������˶����ԣ�ͬʱ����������ʻ��ʵʱ�������ʺ�ʵ�ʳ�����������Ӧ�á�
