
������Ӧ�淽����ת�������Ż����
��Ӧʱ1�����1����λ��1��������2
(1. ���ϴ�ѧ ���������Ƚ������������ص�ʵ���ң����� ��ɳ��410082��
2. �����������������˾������ ���ޣ�412002)
ժ Ҫ��
ʱǰ���DZ仯������£�Ϊʵ�ֶԳ���ת���˶�ѧ�����Ż�����ijС��Ƥ����Ϊ�о���������ADAMS/CAR��������ǰ���ܺ�ת���ܳ���������ģ�ͣ�����ת�����������ʵ�顣���ڡ�����ͷ�Ŀռ�����Ϊ�Ż��������ֱ����������ľ�������ǰ���ǵı仯��ΧΪĿ�꣬����DOE��������2��������ƣ�����ʵ�����ֱ��Ӱ�찢��������ǰ���ǵ�Ӱ�����ؽ��������ȷ�����������Ӧ�淽��(RSM)��ϳ��ع�ģ�͡�����MATLAB�Ż���������Լ��ǰ���ǵ�����£��������������Ż����õ�Ӳ�������ֵ���о������������ǰ���ǵı仯��Χ����10%��ǰ���£�ת�������0��~25�㳣��ת��Ƕȣ�������������51.27%���Ż���Ľ�����Եظ�����ת����˶�ѧ���ԣ����ұ����˵����Ż�ת��ǰ������ɵ�Ӱ�졣
�ؼ��ʣ�
ת������������������ǰ������������������Ӧ�淨��ʵ����Ʒ�����
��ͼ����ţ�U463.4 ���ױ�־�룺A ���±�ţ�1672-7207(2012)07-2601-06
Optimization of Ackerman steering linkage based on RSM
TANG Ying-shi1, ZHU Biao1, ZHU Wei-yu1, JIANG You-qing2
(1. State Key Laboratory of Advanced Design and Manufacture for Vehicle Body,
Hunan University, Changsha 410082, China;
2. Zhuzhou Elite Electro Mechanical Co., Ltd., Zhuzhou 412002, China)
Abstract: For the purpose of getting the best steering performance on the optimization of steering systems, considering the toe angle��s change, a virtual front vehicle system of the electric sightseeing vehicle was built by ADAMS/CAR. The system included double wishbone suspension and rack-pinion steer. Steer and toe angle simulations were run in this model. Experiment was designed according to DOE theory, and sensitivity analysis was given about the hard points of inner and out tie rod. Then the object functions, which was the relationship between the total root mean squared (RMS) of Ackerman error and toe angle with different variables, were estimated by using response surface methodology (RSM). Last but not least, the optimization result of design factors by MATLAB was given. The results show that steer performance of the car improves by 51.27%, and the change of toe angle reduces by 10%.
Key words: steering mechanism; Ackerman error; toe angle; virtual prototype; response surface methodology (RSM); DOE
������ת��ϵͳ�ڳ�����ʻ�����У��������IJٿ��ԡ��ȶ����Լ���̥��ĥ���кܴ��Ӱ�졣ͬʱ��������ʵ�ʵ�ת������У�Ҳ������ϵͳ�Ľṹ������ת��ϵͳ֮���������й�[1]����ˣ��о������ת�������֮��Ĺ�ϵ����ת�������������ŷdz���Ҫ�����á�����������ʱ��ת�����ζ�ǰ�ֶ�λ�����е�ǰ���ǵı仯Ӱ����Ϊ����[2]��������Ż�ת������ʱ�����뿼��ǰ���ǵı仯������[3]���Ż��Ͽ�ʽת������ʱ��ת��ϵͳͶӰ��ƽ���ϣ�ʹ����ͼ�������������[3-5]�����˶Ͽ�ʽת�������ƽ����ѧģ�͡�����[6]�����˶Ͽ�ʽת������Ŀռ���ѧģ�ͣ�����MATLAB�Ż������䵥����ת��ϵͳ�����Ż���������������ADAMS/CAR������������˫���Ť������ת�����������ģ�ͣ������˶���������ǰ���ǵ�2�η���ʵ�顣��ͨ����ADAMS/Insight�н�����DOEʵ�������ѡ����Ӧ�淽��(RSM)����ϳ������밢������������ǰ����֮��Ļع麯������һ���о��˱�����ת�������Լ�ǰ���ǵĹ�ϵ��ͬʱ�����˸��ӵĹ�ʽ�Ƶ�����㡣�������MATLAB�Ż������䣬�Ż�ת�����Σ��Ż��˰���������������ǰ���ǵı仯��Χ���ﵽ�Ϻõ�Ч����
1 ת�����ε����Ҫ��
������ת��ʱ��Ҫ��֤�������������������ֱ���Χ��ͬһ��˲��ת�������������㰢����ת��ԭ������ͼ1��ʾ������������ѧԭ��Ҫ������ͶӰ��һ��ƽ���ϣ���ǰ����ת��ʱ�������ֱ���������¹�ϵ��![]() ��ʽ�У�
��ʽ�У�![]() Ϊ���ת����ת�ǣ�
Ϊ���ת����ת�ǣ�![]() Ϊ�ڲ�ת����ת�ǣ�LΪ�����־ࣻtkpΪ������������潻���ľ��롣
Ϊ�ڲ�ת����ת�ǣ�LΪ�����־ࣻtkpΪ������������潻���ľ��롣
������ʵ��ת�������У�������ת�����κ���������ת����Χ�ھ������������ͨ��ֻ�ǽ��Ƶ��� ��[7]���������ܳ�����ת�����ζϿ���λ��ѡ����ʱ������ת���ϵ�����ܵ�������˶���Э������������ʻ�����оͻ����ǰ�ְ�����ƫ�������ƻ������ȶ��ԣ��Ӿ���̥ĥ��[8-9]����������ת�����ε�ʱ�ͱ���ʹ������ת�������У��������㰢����ԭ�����Ӷ�������̥��ĥ�����ת������ܡ�
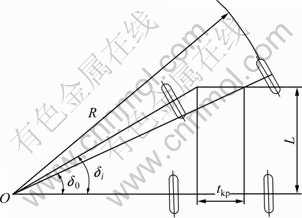
ͼ1 ���밢����ת��ԭ��ʾ��ͼ
Fig.1 Schematic diagram of ideal ackerman steering
����ֱ����ʻʱ������������ʱ��������ǰ���ǵı仯��ǰ���ǵı仯��Χ����������������������̥ĥ�����Ӻ�ֱ����ʻ�������Ȳ��������ת�����ε�������ͷ��λ�ö�ǰ���ǵı仯���Žϴ��Ӱ�졣�������ƺ��Ż�ת��Ĺ����У�����ͬʱ����ǰ���ǵı仯��Χ[10]��
2 ��������ģ�ͽ��������
2.1 ˫���Ť������ת��ģ�͵Ľ���
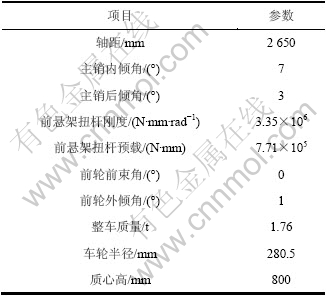
��������ij��С��Ƥ����Ϊ�о��������ó�ǰ����Ϊ˫���Ť�˵Ķ������ܣ�Ť�˵ĸն�Ϊ���Ընȣ�ת��ϵͳ���õ����������Ļ�еʽ���ֳ���ת����ɷ���Ϊǰ��50%�����1��ʾ�����������Լ�ǰ�ֶ�λ������
��1 ������Ҫ����
Table 1 Main vehicle parameters
ͼ2��ʾΪת���ǰ����ģ�͡���ADAMS/CAR�н�������������ģ�͡�
2.2 ������������
2.2.1 ����ת��������
��Ƥ���ij��ֳ�������г�Ϊ68 mm�����ݴ˲����Ը�ģ����ת����������Ա������ڳ��ֳ����Ĵ��������ò�ȷ������������������г̣�ʹ��������ת���������ڴ˳���ת�������еİ�����������������Ϊ���ֵ�ʵ��ת���밢��������ת��֮�ͼ3��ʾΪ���ְ��������������ת�ǵĹ�ϵ�����������Ϊ��ʱ����ʾ����ʵ��ת�Ǵ��ڰ���������ֵ����֮�����ʾС������ֵ������������������ʻ�����У�������0��~25���ת�Ƿ�Χ��ת�����Ա�֤��һ��Χ�ھ��н�С�����������и���Ҫ��ʵ������[11]��

ͼ2 ת���ǰ����ģ��
Fig.2 Model of steer and front suspension system
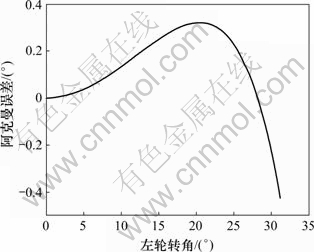
ͼ3 ���ְ��������������ת�ǵĹ�ϵ
Fig.3 Gragh of Ackerman error vs left steer wheel angle
2.2.2 ƽ�������������
���ݸó�ʵ�����й�����ѡ����̨��ǰ����ģ�ͽ��������������ķ���Ϊ80 mm��ƽ������ʵ�飬���ڲ����ڴ˹�����ǰ���ǵı仯�����ͨ��ADAMS/CAR�ķ����������ͼ4��ʾ���õ����ֵ�ǰ���ǵı仯���ߡ��������߹���ԭ��Գƣ������ڸ�ͼ��ֻ��ʾ�˳������������ߡ�
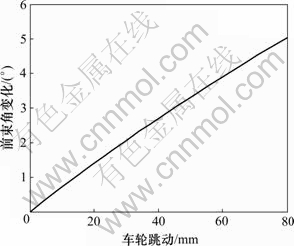
ͼ4 ǰ���DZ仯����
Fig.4 Change of toe angle
3 DOEʵ����Ƽ���Ʊ�����ѡȡ
DOE(Design of Experiments)ʵ����Ʒ�������һ��ͨ��ʵ����ƺͰ��ţ���������ͳ�ƹ������滮ʵ�顢����ģ�������ݵ�һ�ַ�����DOE�ܹ��Խ�С��ʵ���ģ���϶̵�ʵ�����ںͽϵ͵�ʵ��ɱ�����ý�Ϊ�����ʵ�������ó���ѧ�Ľ���[12-13]��
ͨ��ADAMS/Insight��DOE�������ܹ����õ��˽�ת�����ε�Ӳ���밢�������Լ���ǰ����֮��Ĺ�ϵ����2��ʵ�鵼����ADAMS/Insight ���������н�һ���ķ���[14]��
3.1 ת��������Ӱ�����ӷ���
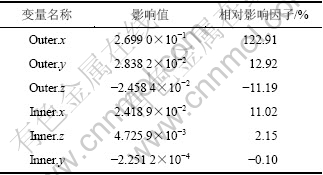
��ת������������ADAMS/Insight��ѡȡת�����ε�������ͷ��3�������ϵ�Ӳ������Ϊ���������������ľ�����ΪĿ�꣬����DOEʵ���������������ǰ���ķ�����ΪX����������ǰ�����ҷ���ΪY��������ֱ���ϵķ���ΪZ�����������2��ʾ���õ���6�������������������Ӱ�����ӡ����Ӱ������ΪӰ��ֵ���ʼĿ��ֵ֮�ȣ���ʼĿ��ֵ�������б�����Ϊ��ֵʱ����ó���Ŀ��ֵ�������������Ӱ�����ӱ�ʾ����أ��������Ӱ�����ӱ�ʾ����أ����Ӱ�����ӵľ���ֵԽ��ʾ�ı�����ı仯��ΧҲԽ����100%�����Ӱ�����ӵı�����ʾ�ñ����������Ŀ��ֵ�ı仯��Χ�ϴ���Ӱ��ֵ���ڳ�ʼĿ��ֵ���Ӷ����Դ����Ӱ�����ӿ��������ı仯��Ŀ��ֵ�仯��Ӱ����Լ���Ҫ�̶�[15-16]��
��2 Ӳ������ֵ����������Ӱ��
Table 2 Influence of points coordinates on Ackerman error
3.2 ǰ���DZ仯��Ӱ�����ӷ���
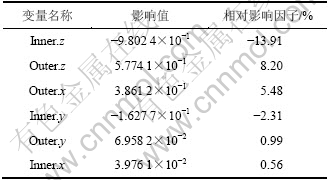
��ǰ���ǵķ����������ADAMS/Insight��ѡȡת�����ε�������ͷ��3�������ϵ�Ӳ������Ϊ��������ǰ��������������ʱ�����ֵΪĿ�꣬����DOEʵ���������3��ʾΪӲ������ֵ��ǰ���DZ仯��Ӱ�졣
��3 Ӳ������ֵ��ǰ���DZ仯��Ӱ��
Table 3 Influence of points coordinates on toe angle
3.3 ��Ʊ�����ѡȡ
�ӱ�2��3���Կ�������6��������ת���Լ�ǰ���DZ仯��Ӱ�졣����Inner.y����ת���Ӱ��dz�С����ǰ���ı仯��Ӱ��Ҳ��С����������ת��������ߴ��Ӱ�죬��������ı䣬����5���������ڰ���������Լ�ǰ����Ӱ����в�ͬ����ѡȡ���˱����������5������Ϊ��Ʊ��������Ż�ת�����Ρ�������ͷӲ��X��Y��Z�������꣬����ͷӲ��X�������ꡢZ��������ֱ�����Ϊ����x1��x2��x3��x4��x5��
4 ������Ӧ�淽�����Ż�
��Ӧ�淽��(RSM)����ѧ������ͳ�Ʒ�����ϵIJ��ͨ��һϵ�еĶ���ʽ��������ƴ���һ��Ŀ����Ӧ�档��Ӧ�淨�ܹ���ϳ�һ�����Ƶİ�����������ĺ�����������Ӧֵ��������Ӧ�淨������������ڱ�����Ŀ�꺯����ϵ�ĺ���������Ŀ�꺯������������ȷ�����Ž⣬��ϳ��ϸ߾��ȵ���Ӧ��ϵ��������Ӧ�淨�㷺��Ӧ������ƺ��Ż������С�
���ھ�����������������ϵͳ����ӦR������f1��f2��f3������fn֮������ź�����ϵʽ��
![]()
���߶��ڸ����ӵ�ģ�ͣ���������ģ�Ͳ���ȷ��������Ӧ���棬���Բ��ö��κ��������Ƶ�������
![]()
��Ӧ�淽�����������ķ�ʽ���еģ����������Ŀ�꺯����ֽ��ƣ��������ķ������Ƶ���ʵ��ϵͳ�ķ�����������ʵ�����������ռ����ϣ�ģ�Ͳ����Ϳ���Ч�ر����ơ�
4.1 ת��ģ�����
����ת��ģ�����ѡȡ5��������Ŀ��Ϊת���°�������������ֵ�����ö��κ��������Ŀ�꺯�����о����Բ��õ���DOE Response Surface��DOE�������Ϊȫ������ƣ�������243�η��档�õ�������Ϻ�����
![]()
![]()
![]()
![]()
![]()
![]() (1)
(1)
4.2 ǰ����ģ�����
����ǰ����ģ�����ѡȡ5��������Ŀ�꺯��Ϊ��̥�������������ǰ���ǣ�����һ�κ��������Ŀ�꺯�����о����Բ��õ���DOE Response Surface��DOE�������Ϊȫ������ƣ�������32�η��档�õ�������Ϻ�����
![]()
![]() (2)
(2)
4.3 ����ģ�͵����ȷ��
ת��ģ����Ϻ�����������ϵ����ƽ��R2Ϊ0.996 481�����������������ϵ��![]() Ϊ0.996 164�������ú���(1)�ܹ��ܺõ������Ӧ���档
Ϊ0.996 164�������ú���(1)�ܹ��ܺõ������Ӧ���档
ǰ��ģ����Ϻ�R2Ϊ0.998 617��![]() Ϊ0.998 351�������ú���(2)�ܹ��ܺõ������Ӧ���档
Ϊ0.998 351�������ú���(2)�ܹ��ܺõ������Ӧ���档
4.4 �Ż�
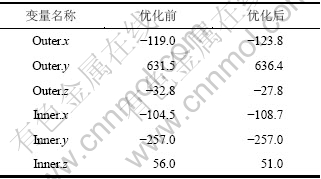
������Ϻ�����������������������СֵΪĿ�꣬��ǰ���ǵ����ֵ���ͱ����ı߽�Լ������ΪԼ����ʹ��MATLAB�Ż����ߣ��ð��������ľ�����ֵ��ΪĿ�꺯����ǰ������ΪԼ�����õ��Ż�������Ż�ǰ��������4��ʾ���Ż������ͼ5��6��ʾ������������ڳ���ת��Ϊ0��~25��ʱ������С�����������ľ�����������51.27%��ǰ������ʱ�����ǰ���Ǽ�СΪ4.5�㣬����10%��
��4 �Ż�ǰ������Ա�
Table 4 Change of factors
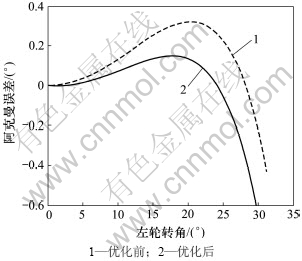
ͼ5 ���������仯�Ż�ǰ��Ա�����
Fig.5 Changes of Ackerman error before and after optimized
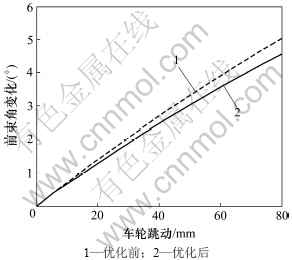
ͼ6 ǰ���DZ仯����
Fig.6 Changes of toe angle vs wheel��s jumping before and after optimizing
5 ����
(1) �Ż����λ�����ת���˶�ѧ��������ǰ���ǵı仯��������ǰ���仯��Χ����10%��Լ��ǰ���£����ýǶȰ�����������51.27%��
(2) �˷����ڿ����������������ܲ����Լ�ǰ�ֶ�λ������ǰ���£��õ���ת������Ӳ���밢������ǰ���DZ仯����Ϻ�����ϵ����֤��ȷ����ʵ���ԣ��������˷�������ѧ�Ƶ����㡣
�ο����ף�
[1] ����, ����. ����ϵͳ����ѧ[M]. ����: ��е��ҵ������, 2005: 259-268.
YU Fan, LIN Yi. The vehicle dynamic[M]. Beijing: China Machine Press, 2005: 259-268.
[2] �Ϲ��ı�, ������. ȫ����ԽҰ��ǰ˫��۶���������ת��ϵͳ����Ʒ���[J]. ��������, 2008, 30(4): 345-348.
SHANGGUAN Wen-bin, WANG Jiang-tao. Design and analysis of double-wishbone suspension and steering systems of an all terrain vehicle[J]. Automotive Engineering, 2008, 30(4): 345-348.
[3] ������. �������[M]. ����: ��е��ҵ������, 2004: 249-254.
WANG Wang-yu. Automotive design[M]. Beijing: China Machine Press, 2004: 249-254.
[4] ������, ������. �����Ͽ�ʽת�����λ������Ż����[J]. ��е���������, 2007(12): 1-3.
ZHANG Li-guo, NING Guo-bao. Optimal design for Ackerman steering linkage of car[J]. Mechanical Design and Manufacture, 2007(12): 1-3.
[5] Ҧ����, ������. ����ת�������Ż���Ƽ�����ⷽ�����о�[J]. ��е���������, 2007(5): 24-26.
YAO Ming-long, WANG Fu-lin. The optimal design of steering trapezoidal mechanism of vehicles and the research of solution method[J]. Mechanical Design and Manufacture, 2007(5): 24-26.
[6] �¿�, ������, �Ĺ���. �Ͽ�ʽת�����λ�����Ƽ��Ż�[J]. �����Ƽ�, 2008(2): 23-26.
CHEN Jun, DAI Gui-zhen, XIA Guo-lin. Optimal design for Ackerman steering linkage[J]. Automotive Science and Technology, 2008(2): 23-26.
[7] Yamakawa J, Watanabe K, Yasuda Y. Turning characteristics of articulated tracked vehicles. Vehicle characteristics and steering performance[J]. Transactions of the Japan Society of Mechanical Engineers C, 2001, 67(657): 1544-1551.
[8] Reimpell J. �������̻���[M]. �ź���, ��ƽ, ��. ����: ��ѧ�ռ�������, 1992: 154-158.
Reimpell J. Automotive chassis elements[M]. ZHANG Hong-xin, YU Zhuo-ping, transl. Beijing: Popular Science Press, 1992: 154-158.
[9] Reimpell J. ������ʻ����[M]. ������, л����, ��. ����: ��ѧ�ռ�������, 1992: 89-92.
Reimpell J. Automotive driving ability[M]. HUANG Xi-ping, XIE Chun-yang, transl. Beijing: Popular Science Press, 1992: 89-92.
[10] Cherian W, Jalili N, Haque M. Development of a non-linear model of a double wishbone suspension for the characterization of force transmission to the steering column and chassis[C]// Proceeding of ASME(2004). International Mechanical Engineering Congress and Exposition. California, 2004: 775-780.
[11] ��Ω��. �������[M]. ����: �廪��ѧ������, 2004: 503-504.
LIU Wei-xin. Automotive design[M]. Beijing: Tsinghua University Press, 2004: 503-504.
[12] Grove D M, Davis T P. Engineering, quality and experimental design[M]. England: Longman Pub Group, 1992: 28-48.
[13] Schneider T, Fielke J M. Simulating the cornering behaviour of multiple trailed implements[J]. Biosystems Engineering, 2008, 100(3): 355-361.
[14] ��Ӧʱ, ռ��ʤ, ���ʾ�. ��������˫ǰ��ת��ϵͳ���˶�ѧ�Ͷ���ѧ�Ľ�ģ��������[J]. ���ϴ�ѧѧ��, 2003, 30(3): 59-61.
TANG Ying-shi, ZHAN Liang-sheng, YAN Ren-jun. Kinematics and dynamic simulation of double front axle steering of heavy vehicle[J]. Journal of Hunan University, 2003, 30(3): 59-61.
[15] ����ƽ, ������, �ܿ�. ��������ת�����ζϿ���λ�õ��Ż����[J]. ũҵ��еѧ��, 2007, 38(2): 30-34.
JIANG Guo-ping, WANG Guo-ling, ZHOU Kong-kang. Optimization design of splitting point of Ackerman steering linkage of independent based on Adams[J]. Transactions of the Chinese Society for Agricultural Machinery, 2007, 38(2): 30-34.
[16] �ܱ�, �, ����. ����ADAMS��ת��������Ż����[J]. ���ϴ�ѧѧ��, 2008, 35(12): 23-26.
ZHOU Bing, YANG Fan, XU Qi. Optimal design for steering linkage base on ADAMS[J]. Journal of Hunan University, 2008, 35(12): 59-61.
(�༭ �°���)
�ո����ڣ�2011-09-24�������ڣ�2011-12-15
������Ŀ������������ѧ���봴���Ŷӷ�չ�ƻ���Ŀ(531105050037)
ͨ�����ߣ���Ӧʱ(1946-)���У����������ˣ����ڣ������������̶���ѧ�����о����绰��13908482642��E-mail: ystang_hnu@126.com
ժҪ���ڿ�����������ʱǰ���DZ仯������£�Ϊʵ�ֶԳ���ת���˶�ѧ�����Ż�����ijС��Ƥ����Ϊ�о���������ADAMS/CAR��������ǰ���ܺ�ת���ܳ���������ģ�ͣ�����ת�����������ʵ�顣���ڡ�����ͷ�Ŀռ�����Ϊ�Ż��������ֱ����������ľ�������ǰ���ǵı仯��ΧΪĿ�꣬����DOE��������2��������ƣ�����ʵ�����ֱ��Ӱ�찢��������ǰ���ǵ�Ӱ�����ؽ��������ȷ�����������Ӧ�淽��(RSM)��ϳ��ع�ģ�͡�����MATLAB�Ż���������Լ��ǰ���ǵ�����£��������������Ż����õ�Ӳ�������ֵ���о������������ǰ���ǵı仯��Χ����10%��ǰ���£�ת�������0��~25�㳣��ת��Ƕȣ�������������51.27%���Ż���Ľ�����Եظ�����ת����˶�ѧ���ԣ����ұ����˵����Ż�ת��ǰ������ɵ�Ӱ�졣
