
����SimHydraulics��ˮ�����һ����ϵͳ��̬����
��־������Ϧ��������
(���ϴ�ѧ ��Դ�밲ȫ����ѧԺ������ ��ɳ��410083)
ժ Ҫ��
��ʽSYYG65��ˮ�����һ����ϵͳΪ�о�������Matlab��Ӧ��SimHydraulics�����䣬����ˮ�����һ����ϵͳ��̬����ģ�ͣ�ʵ������/��е�Ļ�Ϸ��档��ģ���̲�����ϵͳ����״̬��ת��������Ч��ʵ���˻����ͷ�о��ˮѹ�������µ���ϼ��㡣�ڱù�ˮ����Ϊ120 L/min����ѹ��ж��ѹ��Ϊ16 MPaʱ����ϵͳ���з�����㣬������ڴ������³�������˶������ǰ��ǻѹ���仯�������ߣ�����ʵ�������бȽϡ�ͬʱ��������һ��̬����ģ�Ͷ����������������Ż����㡣�о��������������Ч�ݻ�Ϊ0.24~0.27 L�ͳ���ѹ��Ϊ5.00~5.75 MPa�����Ź��������£�SYYG65��ˮ�����һ����ϵͳ������������������ߡ���SimHydraulics����ģ�Ͷ�ˮ�����һ����ϵͳ������ƺ��Ż�ƥ���о�����Ч�ġ�
�ؼ��ʣ�
SimHydraulics������ˮ�����һ����Ż������
��ͼ����ţ�TD431 ���ױ�־�룺A ���±�ţ�1672-7207(2011)12-3835-09
Dynamical simulation of impact system of water-powered percussive rock drill based on SimHydraulics
LI Zhi-guo, LI Xi-bing, WANG Bin
(School of Resources and Safety Engineering, Central South University, Changsha 410083, China)
Abstract: The dynamical simulation model of water-powered percussive rock drilling system was built by SimHydraulics toolbox of Matlab code, based on the self-researched SYYG65 rock drilling system. And then the fluid/mechanical hybrid simulation was realized. The simple and effective coupling calculation of piston and the valve core under the water pressure was carried out by avoiding the transition of the running state of the system. With the 120 L/min in pump water supply and 16 MPa in unloading pressure, the typical curve was drawn by simulation computation, which coincided with the measured data. Furthermore, the optimization calculation of the accumulator was carried out by the simulation model. The results show that the utilization of the impact system is increased significantly when the effective volume is 0.24-0.27 L and the inflation pressure is 5.00-5.75 MPa. SimHydraulics dynamical simulation on water-powered percussive rock drilling system is effective.
Key words: simulation based on SimHydraulics; water powered percussive rock drill; optimization
������һ��ǿ�ɽ���ɡ������������Ҫ�豸�����ݻ��������˶��Ķ���Դ��ͬ��������һ���Ϊ������Һѹ���綯����ȼ�ȡ�Ŀǰ�ձ����Һѹ������(��ѹ)������һ������������幤�̰�ȫ����ͻ���������Ҫ��Խ��Խ��������ҵ���ܡ���Ч����Ҫ���ø�ѹˮ����ѹ���������������Ϊ���һ��������ʣ���ˮ�����һ�������Խ��Խ�������ǵĹ㷺��ע[1-3]��ˮ�����һ����Դ�ˮΪ�����������ʵķ���Һ��ϵͳ���乤�����̷��������˶��ͻ�е�˶����ɣ����ܶ������ص�Ӱ������Լ���˶�����ʮ�ָ��ӡ���ͳ����Ʒ��������������ڳ������øߣ���������ƵIJ�Ʒ�����кܴ�������ԣ����Դﵽ�������ŵ�Ҫ�����ż���������ķ��ٷ�չ���ü������ϵͳ���Խ������ַ������Ż�����о������гɱ��ͣ�Ѹ�ٿ�ݵ��ŵ㣬�ܷ���ط�����������ϵͳ���Ե�Ӱ�졣����ˮ�����һ���������˶�������о�������������ͳһ���������������Һѹ������˶����澭�飬���õij�����˶����淽�������¼��֣��ȼ��ٶ� ��[4-5]���÷���У��������Խ��ѣ���ʱ���Դﵽ����ļ��㾫�ȣ�����Matlab/Simulink��Һѹ�������̬���淨[6-7]���÷����������Է���ط������������Գ�������ܵ�Ӱ�죬�������Ż���Ʋ�������������Simulink���滷���µ�Stateflow ʵ��ϵͳ״̬ת��������AMESim���������ֿ���Һѹ��������淨[8]���÷�����������и�λѹ����Ծ����������������˷��澫�ȣ����ڹ��ʼ���ͼ����Һѹ�������̬�������ַ����о���[9-11]�����ʼ���ͼ��ͻ���ŵ��ǿɶ����о��ĸ��ֵ��Ͷ�̬Ӱ���������Խ�ȫ��Ŀ��Ǻ���������ϵͳʵ��������Ϊ���ϣ���ȫ�桢ȷ�ؽ�ʾϵͳ�Ķ�̬���Լ�������ֵĶ�̬�仯���ɣ�Ȼ��������������������Ӧ����������״̬���̼�����㣬��Matlab��ƽ̨�������������������ķ� ��[12-13]���÷�����ʵ���������CAXA�����õ���������ģ��ת���͵��뵽Adams/View�����У�����������ģ������Լ�����غ�,���л����˶�ѧ�Ͷ���ѧ���Է��棬�÷�����������������˻����������˶�ѧ�Ͷ���ѧ���棬δ��ʵ�ֻ����˶���Һѹ�����ںϡ����ϸ�����ƽ̨��ģ��ʹ�õ����ź����������Ա���Һѹϵͳ�����е������˶�������ѹ���ᷢ�����ݲ�����������Ҳ��ı䡣��SimHydraulics��Һѹ�����Ϳ���ϵͳ�Ľ�ģ�ͷ���רҵ���ߣ���չ��Simulink�Ĺ��ܡ�ʹ��������߿��Խ���ͨ�������Ŀ���ϵͳ�����ź�����ͼ����ģ�����ź�����˫�ݡ����ҿ��Խ��ò���ģ��ͬʹ�ô�ͳSimulink ģ�齨������������ģ�ͺ�����Simulink�����佨������������ģ�Ͳ����������������Խ�������Һѹ�ͻ�еԪ������������ģ�ͣ����ڿ�רҵ����ϵͳ�Ľ�ģ������������SimHydraulics����ˮ�����һ�����/��е���ʵ��ģ�ͣ����������Ƶ�SYYG65��ˮ�����һ������ܡ��ṹ�������˶��Ȳ��������˼�����֤�������ˮ�����һ���ѹ��������Ч�ݻ�������ѹ����չ���Ż����㣬�õ��˽�Ϊ�����ƥ�������
1 ˮ�����һ��Ĺ���ԭ�����ص�
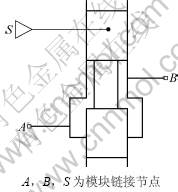
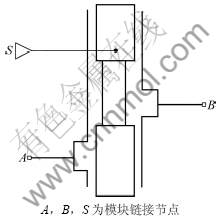
�Ժ��ʽSYYG65��ˮ�����һ�Ϊ�о�����ͼ1��ʾΪSYYG65��ˮ�����һ��ij���������������ԭ��ͼ��
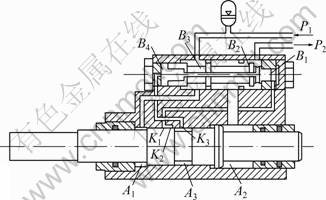
ͼ1 ˮ��������������ԭ��ͼ
Fig.1 Principle of water-powered impact and reverse mechanism
ͼ1��ʾΪ��һ�γ�̽����������س̿�ʼ��״̬���Ӹ�ѹˮ��վ�������ĸ�ѹˮP1����ѹ���������뵽����������������У���ѹˮP1��������B3ǻֱ�ӽ��������ǰǻA1���ƶ������������س̼����˶���������̨���ԵԽ��K1���ƿ�ʱ����ѹˮP1������ǰǻ��K1�ڽ��뷧о���Ҷ˿���ǻB1���ƶ���оѸ�����Ʋ�ͣ������λ����ʱ����ǰ��ǻ��ͨ��ѹˮ��ʵ�ֲ���ӡ������ǰ��ǻ���������ͬA2��A1��������ѹ��������������س̼����˶���ֱ���ٶ�Ϊ0 mm/s���س̽�����������ѹ����������»�����������ij�̼����˶���������ǰ��̨����ԵԽ��K2���ƿ�ʱ(K1���ѹر�)����ʱ��о�Ҷ˿���ǻB1�ĸ�ѹˮ����K2��K3���ƿںͻ�ˮ��P2��ͨ����о�Ҷ�ʧѹ����о�����ˮѹ��(��ѹǻ)�������£���оѸ�����ƻ���ʱ�������ó��ǥβ����̽�����ϵͳ���½���ͼʾ����״̬����ʼ��������һ������ѭ��������ͨ���������й��������δ�K1��K2�ڣ��Ӷ�ʵ�ֻ����������˶������ϳ��ǥβ���������ܡ�
ˮ�����һ����˶����̾������µ��ص㣺�����ͷ�о�����˶����Էֳ�����״̬[7]������״̬����һ��������ת���������ڴ������ʵ������ԣ�����״̬��ת���������ɻ�����о��λ�ü綨�������ͷ�о���˶����и߶���ϡ�SimHydraulics������ˮ�����һ����ϵͳ�˶�ʵ��ģ��ǡ�ÿ�����ʵ�ط�ӳˮ�����һ�����뻻��������������á�
2 ˮ�����һ���SimHydraulicsģ��
ˮ�����һ���SimHydraulicsģ����Ҫ�ɻ�������о�˶�ģ�͡�Һ������ģ�ͣ�ǻ�塢��·��������������ģ����ɡ�
2.1 ��������о�˶�ģ��
��ˮ�����һ�����ԭ����������о���Խ���ͳһ����ƽ�ⷽ�̣�
![]() (1)
(1)
ʽ�У�mΪ����/��о������kg��F(p)Ϊ����/��о�ܵ�����ЧҺѹ������N��fΪ����/��о�ܵ�����������������Ħ������Һ�����������Һ�����ȣ�N��![]() Ϊ����/��о�ļ��ٶȣ�m/s2��
Ϊ����/��о�ļ��ٶȣ�m/s2��
�÷�����˫��������Һѹ��ģ�顢Һѹ��Ħ��ģ�鼰����ģ�鹲ͬ������
���У�Һѹ��Ħ��ģ��(ͼ2)�����������£�
 (2)
(2)
![]() (3)
(3)
ʽ�У�vthΪ�ٶȷ�ֵ��һ��ȡ10-4~10-6 m/s��FΪ��Ħ������N��FCΪ����Ħ������N��FprΪԤ�غɣ�N��fcfrΪ����Ħ��������N/Pa��pA��pBΪˮѹ����ǻѹ����Pa��KbrkΪ��Ħ��������ϵ����cvΪǨ��ϵ����s/m��vΪC����R������ٶȣ�m/s��vR��vCΪR�˺�C�˾����ٶȣ�m/s��fvfrΪ���Ħ��������N��s/m��
����ƽ����SimHydraulicsģ�������Զ���֤��������Ӧ��λ�Ʋ��ռ�������ģ������Ļ����˶�ģ����ͼ3��ʾ��
��о�˶�ģ�������ģ�����ƣ���ģ����������ò�ͬ��
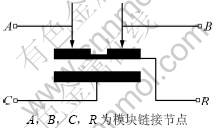
ͼ2 Һѹ��Ħ��ģ��
Fig.2 Cylinder friction
2.2 Һ������ģ��
�ò���ʵ�ֻ����뷧������ƹ��ܣ�ģ��A1��K1��A3��K1��ǻ��ѹ��ˮ������A1��A2ǻ��й©�Լ�B2��B3��B3��B5��ǻ(ͼ1)ѹ��ˮ��ͨ������A1��K1��A3��K1��B2��B3��B3��B5�ɱ������ʽ��ģ��(ͼ4)ģ�⡣
�������������£�
 (4)
(4)
![]() (5)
(5)
![]() (6)
(6)
p=pA-pB (7)
![]() (8)
(8)
 (9)
(9)
![]() (10)
(10)
ʽ�У�qΪ������m3/s��pΪѹ�Pa��pA��pBΪA��B��ѹ����Pa��CDΪ����ϵ����A(h)Ϊ�������m2��bΪ���ڲۿ��ȣ�m��x0Ϊ�ڳ�ʼ���ȣ�m��xΪ����λ��(��Գ�ʼλ��)��m��hΪ�ڿ��ȣ�m��orΪ�������������������ƶ�����������orȡ+1��������orȡ-1����Ϊ�����ܶȣ�kg/m3��DHΪ˲ʱ��ˮ��ֱ����m����Ϊ���嶯���ϵ����Pa��s��AleakΪ������ȫ�رպ�й©�����m2��A1��A2ǻ(ͼ1)��й©�ɻ��ν�����(ͼ5)������
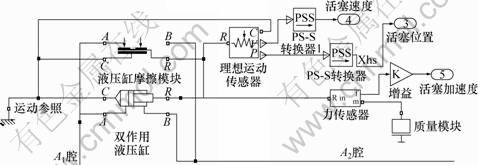
ͼ3 �����˶�ģ��
Fig.3 Piston model
ͼ4 �������ʽ��
Fig.4 Orifice with variable area slot
ͼ5 ���ν�����
Fig.5 Annular orifice
�ý�������������Hagen-Poiseuille ��ʽ[14]���㣺
![]() (11)
(11)
![]() (12)
(12)
ʽ�У�RΪ���װ뾶��m��rΪ����뾶��m��eΪƫ�ľ࣬m����Ϊƫ���ʡ�
2.3 SYYG65��ˮ�����һ����ϵͳģ��
��������ģ����������������Ƶ�GYYG65�͵���ʽˮ�����һ����ϵͳ������SimHydraulicsʵ��ģ�ͣ�ģ���ɻ����˶���ϵͳ���������˶���ϵͳ�����붨���á���ѹ��������������϶��ɣ�ͼ6��ʾΪϵͳ����ģ��ͼ��
��ģ�ͼ�����������Ϊ��ֵ��Ħ������Һ�����������Һ������Һ�崫�ȡ�����նȵ�������ģ���о�����Ӧģ�������ӳ��
ģ�ʹ�Matlab�����ռ����������������ռ���������ͷ�о��λ�ơ��ٶȡ����ٶȣ�����ǰ����ǻѹ������ˮ�������������������������ݣ����ɲ���Matlab�ű����Է��㶨����Ӧ����������Թ���������ʹ�á�
3 ����ʵ��
3.1 SYYG65��ˮ�����һ�����ģ�Ͳ���
SYYG65��ˮ�����һ�����(ͼ1)��Ҫ�����������£���������Ϊ4.97 kg������ǰ��̨��ֱ��Ϊ43 mm������ǰǻ��̨��ֱ��Ϊ47 mm�����ֱ��Ϊ38 mm���������λ��Ϊ56 mm��K1���ھ�ǰǻǰ��39 mm��K2��K1����Ϊ21 mm���ܷ��϶Ϊ50 ��m�����û�������Ħ�����������Ħ����������Ħ��������ϵ����Ǩ��ϵ����(ʽ(2)��(3)����Ӧ����)��
������(ͼ1)����Ҫ������������о����Ϊ0.2 kg�������ھ�Ϊ34 mm����о�⾶Ϊ30 mm������B2ǻ����Ϊ20 mm��B3ǻ����Ϊ23 mm��B5ǻ����Ϊ23 mm����о̨�����Ϊ5 mm�����λ��Ϊ9 mm����о����Ħ������ϼ�϶Ϊ20 ��m����оǰǻB4̨��ֱ��Ϊ29 mm����ǻB1��̨��ֱ��Ϊ13 mm��������ӦĦ��������
A2��B2ǻˮ·�ܾ�Ϊ10 mm�������ڲ���·ֱ����Ϊ8 mm�����һ���ˮ��ֱ��Ϊ18 mm����ˮ��ֱ��Ϊ20 mm��
���������������ǰǻ��Ч�����������ǻ��Ч�����ˮ��ǰǻ�������ǻ����Ȳ����������ϲ�������ó���
Simulink�汾Ϊ7.1(R2008a)�������������Ϊ��ˮ(water)�������ѡȡ�����ڸ��Է��̵�ode15s�䲽�����������������ǻ�����ֵ�ֹ�ʽ(NDFs)�ı�ಽ�����������Ч����ģ�͡���������Ĺ�����ѡ���������Ӧ�����⣬�Ա�֤��ˮ���ʴ�������Ч���档
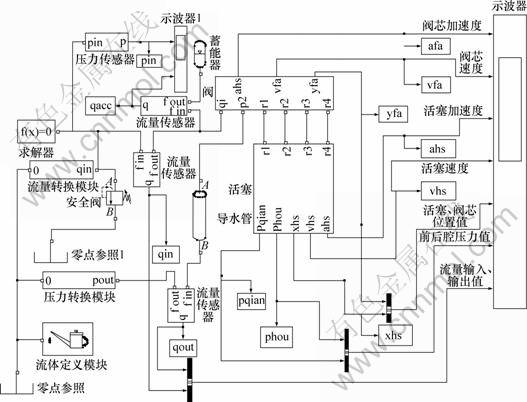
ͼ6 SYYG65��ˮ�����һ����ϵͳ����ģ��
Fig.6 Simulation model of water-powered percussive rock drill SYYG65
3.2 ����������ʵ���������Ա�
3.2.1 ϵͳ����ʵ��
����ʵ��ϵͳ���趨�ù�ˮ����Ϊ120 L/min����ѹ���趨ж��ѹ��Ϊ16 MPa������������ѹ��Ϊ4.5 MPa���ݻ�Ϊ0.15 L�����з���ģ�͡������һ������������1��ʾ��
��1 SYYG65��ˮ�����һ�����
Table 1 Performance of SYYG65 water powered percussive rock drill

ͼ7��8��ʾ�ֱ�Ϊ����ǰ��ǻѹ�������ʵ�����ߡ�
�Ա�ͼ7��ͼ8���֣�����������ʵ������ǰ��ǻѹ���������ƻ���һ�£�ѹ����������ڷ���ģ�ͶԲ������ز�ȡ��������裬�ʷ������߱�ʵ�������Ե�ƽ��������λ��������ͼ9��ʾ���Ա�ͼ7��ͼ9�ɼ���������ʵ���������غϣ������ڻ��������ĽӴ������������𤵯��ģ��[14]���㣬����������ʵ�Ӵ��в��죬�ʻ������������Сλ�Ʒ���ֵ��ʵ����������ƫ�롣
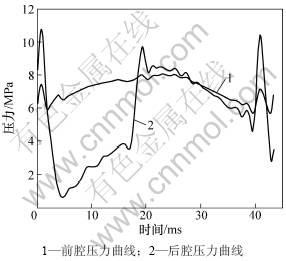
ͼ7 ǰ��ǻѹ����������(�����˶�ѭ��)
Fig.7 Simulated pressure curves of front and back cavity of rock drill (single cycle)
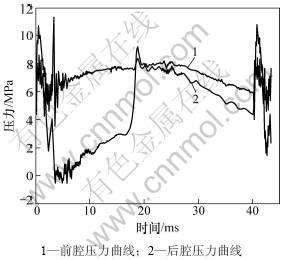
ͼ8 ǰ��ǻѹ��ʵ������(�����˶�ѭ��)
Fig.8 Measured pressure curves of front and back cavity of rock drill (single cycle)
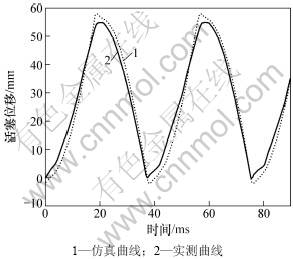
ͼ9 ����λ������
Fig.9 Displacement curves of piston
�ɱ�1�ɼ����������������ʵ�����ݻ���һ�£����ʵ�������ƫ�벻����6%����ģ�ͽ���ʵ��������ˮ�����һ���������ڲ����˶����ɣ�Ϊ���ϵͳ������Ƽ���֤�ṩ�˾��á���Ч��;���빤�ߡ�
3.2.2 �����������Ż�
��ѹ�����������һ�����Ҫ�IJ���֮һ��ͨ������ǻ��Һǻ2������ɣ�����ǻ����ѹ����Һǻ��Ч�ݻ�2����Ҫ����������Ҫ�������ջ����˶�ѭ����ˮ�ù����Ķ����������Բ�����̺��ڻ����˶�����ķ�ֵ����������ϵͳѹ���������ӳ�ϵͳʹ��������������һ����ϵͳ�����������ʡ�
ˮ�����һ����ϵͳ�����������ʦ��Ǻ������һ��������ӵ�һ����Ҫָ�꣺
 (13)
(13)
ʽ�У�EeΪ��������ƶ�����ǰ�˾��еĶ��ܣ�J��EwΪ������������ˮѹ�ܣ�J����Ϊ���Ƶ�ʣ�Hz��mΪ�������������kg��vΪ����������ǥ��ʱ���ٶȣ�m/s��pΪ���������Ч����ѹ����Pa��qΪ�����������������m3/s��
���������������ʦ�Ϊ�Ż�Ŀ�꣬�������������ڷ�ֵ������ϵͳѹ�����������ȷ��ˮ�����һ���������ѳ���ѹ������Ч�ݻ����ڷ�������ϣ�����ѭ����������������ѹ��2~7 MPa��ÿ��0.05 MPa��һ�����ʵ�顣����Matlab�ű��ļ������з���ģ�ͣ������ͼ10~12��ʾ��
��ͼ10���Կ���������������ѹ��Ϊ2~7 MPaʱ���������������������2��ϴ�ֵ�������ѹ����Χ�ֱ�Ϊ2~3 MPa��4.75~5.80 MPa�������������������ѹ�����������彵�͵����ƣ�������[15]֪����Խ�С��������������������ֵ�ɽ���ϵͳ������ʧ����������������ѡȡӦ��ѭ��С������ֵԭ����ͼ11��֪����������ֵ����Q����2���Сֵ���ֱ��Ӧ����������ѹ��2~3 MPa��5.00~5.75 MPa�����ͼ12���֣�����ѹ���ļ�Сʹϵͳ��ѹ������������ǿ��������ϵͳ���ȶ�������Ӱ��ϵͳʹ���������ʳ���ѹ����ѡȡ���˹�С��
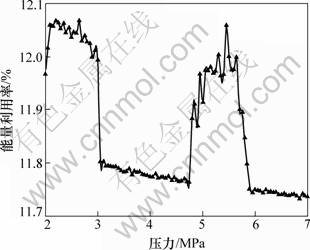
ͼ10 ���������������ѹ���Ĺ�ϵ
Fig.10 Relationship between energy efficiency and inflation pressure of accumulator
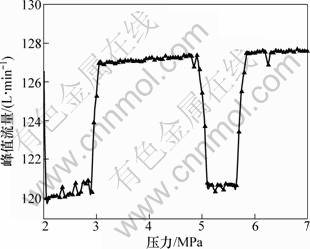
ͼ11 ��ֵ���������ѹ���Ĺ�ϵ
Fig.11 Relationship between peak flow and inflation pressure of accumulator
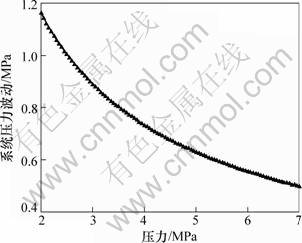
ͼ12 ϵͳѹ�����������ѹ���Ĺ�ϵ
Fig.12 Relationship between pressure fluctuation and inflation pressure of accumulator
����ѹ����ȡ2~3 MPaʱ������������û�������ã���ֵ������С(ͼ11)��ϵͳѹ����������(ͼ12)���ʸ����������ѡȡ��ͼ10�У�ϵͳ�õ��ϸߵ����������ʣ�������ģ�ͼ���ʱ�������������ϴ��������˻�����̼��ٶεķ�ֵ�������ʸó���ѹ��������������Ҳȡ������Խϴ�ֵ��
������������������ѳ���ѹ��ѡ��Ϊ5.00~5.75 MPa��ϵͳ�����������Ĺ���״̬�����нϸߵ�����������(11.9%�ܦǡ�12.07%)���ϵ͵ķ�ֵ���� (Q��121.0 L/min)�����С��ѹ��������Χ(��p�� 0.68 MPa)��
ģ��������������Ч�ݻ���ΧΪ0.1~0.3 L��ÿ��5 mL��һ�����ʵ�顣�������з���ģ�ͣ������ͼ13~15��ʾ��
��ͼ13�ɼ�����������Ч�ݻ�Ϊ0.1~0.3 Lʱ�����������������������2��ϴ�ֵ������Ч�ݻ���Χ�ֱ�Ϊ0.11~0.14 L��0.24~0.27 L������������������Ч�ݻ����������彵�͵����ƣ���ͼ14��֪����������ֵ����Q����2���Сֵ���ֱ��Ӧ��������Ч�ݻ�Ϊ0.1~0.14 L��0.24~0.27 L�����ͼ15���֣���Ч�ݻ��ļ�Сͬ��ʹϵͳ��ѹ������������ǿ��������ϵͳ�ȶ�������ϵͳ����������Ч�ݻ���ѡȡ���˹�С��
�ɼ�����Ч�ݻ���ȡ��Сֵ0.11~0.14 Lʱ������������û�������á���ֵ��������Ч�ݻ���С���Ƹ�������(ͼ14)��ϵͳѹ����������(ͼ15)���ʸ���������ѡȡ�����ԣ���������Ч�ݻ�Ӧѡ��Ϊ0.24~0.27 L��ϵͳ�����������Ĺ���״̬�����нϸߵ�����������(11.9%�ܦǡ�12.05%)���ϵ͵ķ�ֵ����(Q��121.1 L/min)�����С��ѹ��������Χ(��p��0.42 MPa)��
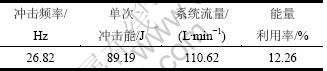
����ͼ10��ͼ13�����ѵõ�����ѳ���ѹ������Ч�ݻ���Χ�ڣ�ѡȡ��������������µ�������Ч�ݻ�(0.255 L)������ѹ��(5.5 MPa)������ͨ�������з���SYYG65�͵���ʽˮ�����һ��������Ż�������ʵ����֤���û���Ч�ݻ�Ϊ0.255 L�ĸ�ѹ����������Ԥ�䵪��ѹ��Ϊ5.5 MPa��������������ͬ�Ͻ�ʵ��ʵ������趨��ʵ��������������ˮ�����һ����������ʴﵽ12.26%���������γ���ܴﵽ89.19 J(��2)�����1��ʵ������ȣ������������뵥�γ���ܾ���������ߡ�
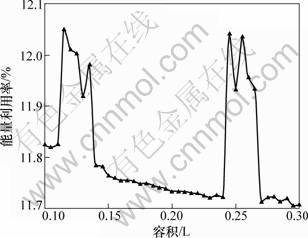
ͼ13 ��������������Ч�ݻ��Ĺ�ϵ
Fig.13 Relationship between energy efficiency and effective volume of accumulator
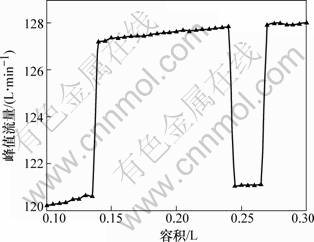
ͼ14 ��ֵ��������Ч�ݻ��Ĺ�ϵ
Fig.14 Relationship between peak flow and effective volume of accumulator
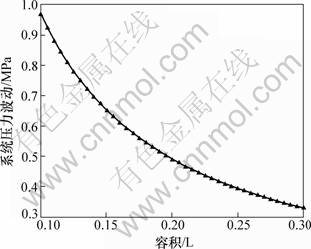
ͼ15 ϵͳѹ����������Ч�ݻ��Ĺ�ϵ
Fig.15 Relationship between pressure fluctuation and effective volume of accumulator
��2 SYYG65��ˮ�����һ����ܲ��Խ��(0.255 L)
Table 2 Measured performance of SYYG65 (0.255 L) water powered percursive rock drill
4 ����
(1) ����SimHydraulics������ˮ�����һ����ϵͳ�˶�ʵ��ģ�ͣ���ģ�����в�����ϵͳ����ʱ�ĸ���״̬ת�����ۺϿ����˻�������о���ܵ�Һѹ��������Ħ������Һ����������ȣ�����Ч��ʵ���˻����ͷ�о��ˮѹ�������µ���Ϸ�����㡣
(2) ͨ�����������Ƶ�SYYG65�͵���ʽˮ�����һ��ķ���ʵ�飬�õ�����ǰ����ǻѹ���Լ�λ�Ƶı仯���ɣ�����ʵ��������ʵ�������ǺϽϺã�֤������SimHydraulics��ȫ���Զ�ˮ�����һ����ϵͳ�˶����ɽ��з��棬Ϊˮ�����һ����ϵͳ������ƺ�ƥ���ṩ����Ч����֤���ߺ������ֶΡ�
(3) ��ϵͳ����������Ϊ�Ż�Ŀ�꣬�������������ڷ�ֵ������ϵͳѹ������ָ��õ�SYYG65��ˮ�����һ��ĸ�ѹ��������ѳ���ѹ��Ϊ5.00~5.75 MPa����Ч�ݻ�Ϊ0.24~0.27 L����ͨ������������ ��֤��
�ο����ף�
[1] Paraszczak J, Planeta S, Ouellet H. Comparative experiment between water-powered jackleg drill and pneumatic drills[J]. Mining Engineering, 1994(8): 999-1002.
[2] ������, ��Ϧ��, ��ӭ��. ֧��ʽˮѹ���һ����о�������[J]. �й���е����, 2004, 15(14): 1236-1239.
ZHOU Zi-rong, LI Xi-bing, LIU Ying-chun. Research and experiment of water-powered rock drill with supporting leg[J]. China Mechanical Engineering, 2004, 15(14): 1236-1239.
[3] ������, ����˳. ˮѹ���һ����о������[J]. ������Һѹ, 2007, 35(4): 123-124.
WU Xian-ming, LIU De-shun. The research and design of hydraulic-rock drill[J]. Machine Tool & Hydraulics, 2007, 35(4): 123-124.
[4] �Ժ�ǿ. ����Һѹ������������Ż��о�[J]. ���һ�е��������, 2001(1): 12-26.
ZHAO Hong-qiang. Study on simulation and optimize of new hydraulic impactor[J]. Rock Drilling Machinery & Pneumatic Tools, 2001(1): 12-26.
[5] ������, ������. Һѹ���һ����Ķ����Է���[J]. ��ɫ����: ��ɽ����, 1987(2): 46-54.
LIU Wan-ling, GAO Lan-qing. The dynamic characteristics of reversing valve of the hydraulic rock drill[J]. Nonferrous Metals: Mining, 1987(2): 46-54.
[6] ������, ����, ������. ����Simulink��Һѹ�������̬����[J]. ���һ�е��������, 2005(3): 40-45.
YANG Wu-zi, QIU Hai-ling, MIAO Run-tian. Dynamic simulation of hydraulic impactor based on Simulink[J]. Rock Drilling Machinery & Pneumatic Tools, 2005(3): 40-45.
[7] ��ΰ. ��Һѹ���һ���̬���̵ķ����о�[D]. ����: �����Ƽ���ѧ��е����ѧԺ, 2004: 34-44.
TANG Wei. Simulation research in dynamic process of valveless hydraulic drill[D]. Xi��an: Xi��an University of Science and Technology. School of Mechanical Engineering, 2004: 34-44.
[8] ������, ��Ө, �, ��. ����AMESim���������ֿ���Һѹ������ķ���[J]. ��е�������Զ���, 2008(3): 105-107.
WU Wan-rong, MENG Ying, YANG Chu, et al. Simulation of a new type of digital hydraulic breaker controlled by the high speed on-off solenoid valves based on AMESim[J]. Machine Building & Automation, 2008(3): 105-107.
[9] ������, ������, �춬÷, ��. ���ڹ��ʼ���ͼ����Һѹ����������̬�������ַ����о�[J]. ���һ�е��������, 1997(3): 23-27.
SUN Shu-li, TIAN Shu-jun, XU Dong-mei, et al. Digital simulation and study of the hydraulic hammer based on power bond graph[J]. Rock Drilling Machinery & Pneumatic Tools, 1997(3): 23-27.
[10] ������, ���Ȩ, ���ܺ�. YYGJ90��Һѹ���һ���̬���ܷ����о�[J]. ���һ�е��������, 1994(3): 51-55.
TIAN Shu-jun, YANG Guo-quan, LIU Neng-hong. Dynamical simulation of the hydraulic rock drill YYGJ90[J]. Rock Drilling Machinery & Pneumatic Tools, 1994(3): 51-55.
[11] ���칦, �ܽ�ǿ, ����. �������������������������һ����������о�[J]. ú���е, 2007, 28(7): 37-38.
ZHANG Qing-gong, ZHOU Jian-qiang, WU Zhen-jiang. Research on design and simulation of pneumatic rock drill based on virtual prototype technology[J]. Coal Mine Machinery, 2007, 28(7): 37-38.
[12] ���칦, ����, л��Ƽ. �������������������������һ���ģ���˶�ѧ����[J]. ú���е, 2008, 29(10): 40-41.
ZHANG Qing-gong, ZHANG Ying, XIE Hui-ping. Modeling and kinematics simulation of pneumatic rock drill based on virtual prototype technology[J]. Coal Mine Machinery, 2008, 29(10): 40-41.
[13] ���칦, ������, ����. ����CAXA��YO18���������һ���ģ���˶�����[J]. �Ƽ���Ѷ, 2006(19): 5-6.
ZHANG Qing-gong, MA Xiao-li, WANG Tao. Modeling and kinematics simulation of pneumatic rock drill YO18 based on CAXA[J]. Science & Technology Information, 2006(19): 5-6.
[14] Manring N D. Hydraulic control systems[M]. New York: John Wiley & Sons, 2005: 56-98.
[15] ������, ���̺�, Okoye C. ������ֵ������Һѹ������������ʧ����[J]. �й���е����, 2006, 17(12): 1283-1285.
LIU Hai-chang, JIANG Ji-hai, Okoye C. Energy loss analysis of hydraulic accumulator during energy storage using numerical method[J]. China Mechanical Engineering, 2006, 17(12): 1283-1285.
(�༭ �Կ�)
�ո����ڣ�2010-11-21�������ڣ�2011-04-29
������Ŀ�����Ҹ����о���չ�ƻ�(��863���ƻ�)��Ŀ(2006AA06Z134)��������Ȼ��ѧ����������Ŀ(50934006)�������ص�����о���չ�ƻ�(��973���ƻ�)��Ŀ(2010CB732004)
ͨ�����ߣ���־��(1980-)���У��ӱ������ˣ���ʿ�о��������������е���ɿ̷�����о����绰��15827566859��E-mail��iamlizhiguo@163.com
ժҪ���������з��ĺ��ʽSYYG65��ˮ�����һ����ϵͳΪ�о�������Matlab��Ӧ��SimHydraulics�����䣬����ˮ�����һ����ϵͳ��̬����ģ�ͣ�ʵ������/��е�Ļ�Ϸ��档��ģ���̲�����ϵͳ����״̬��ת��������Ч��ʵ���˻����ͷ�о��ˮѹ�������µ���ϼ��㡣�ڱù�ˮ����Ϊ120 L/min����ѹ��ж��ѹ��Ϊ16 MPaʱ����ϵͳ���з�����㣬������ڴ������³�������˶������ǰ��ǻѹ���仯�������ߣ�����ʵ�������бȽϡ�ͬʱ��������һ��̬����ģ�Ͷ����������������Ż����㡣�о��������������Ч�ݻ�Ϊ0.24~0.27 L�ͳ���ѹ��Ϊ5.00~5.75 MPa�����Ź��������£�SYYG65��ˮ�����һ����ϵͳ������������������ߡ���SimHydraulics����ģ�Ͷ�ˮ�����һ����ϵͳ������ƺ��Ż�ƥ���о�����Ч�ġ�
