
Һѹ�������ط��������ܵĶ�̬���Է���
����ƽ�����£��������������棬������
(���ϴ�ѧ ���繤��ѧԺ������ ��ɳ��410083)
ժ Ҫ��
����Ƶ�����¶Ի�������Ե�Ҫ����Ʋ������ط����ƵĿ��ٻ������Գ��ϵͳ���÷�ͨ��4�����ƿ�ѹ���ı仯���Ʒ�о���˶���ͨ���ڲ������Ϳ�ʵ�ֶԻ���״̬�ļ��䡣�������ط�����������ԭ�����������ط�������̵Ķ�̬��ѧģ�ͣ�����Stateflow����������̵�״̬ת�����Simulink����������̵ķ���ģ�͡����ʵ�����ز��������ط�������̽��з������������õ��Ļ�������ʱ���ʵ��������һ�¡����÷���ģ�ͣ�������ǻֱ�����ڲ�������ֱ���ͳ����Լ����ɸն�4����Ҫ���ض����ط��������ܵ�Ӱ�졣�о�������������ط���ǻֱ�������ط���������Ե�Ӱ������ڲ������Ϳ�ֱ���ͳ��ȴ�֮�����ɸն�Ӱ����С��
�ؼ��ʣ�
Һѹ���������ط�����������������Stateflow��
��ͼ����ţ�U415.5 ���ױ�־�룺A ���±�ţ�1672-7207(2012)07-2622-07
Dynamic analysis of main control valve reversing performance for hydraulic pile hammer
HU Jun-ping, GUO Yong, ZHANG Zheng-hua, LIU Cheng-pei, DAI Jian-long
(School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract: To make hydraulic pile hammer work at high frequencies when control system rapidly reverses, the main control valve was designed to realize the flexible control of the system with rapid reversing. The spool movement was controlled by pressure variation on four ports and the state of spool movement was remembered through inner feedback hole. According to the working principle of main control valve, the dynamic mathematic model of main control valve reversing was established. Using Stateflow to manage the state transfer of spool movement, the simulation model was presented in combination with Simulink. The simulation was done with parameters in the experiment and the reversing time required is in accord with the results of experiment. The effects of main parameters to reversing performance of main control valve were analyzed. The results show that inner chamber diameter has the greatest effects on reversing performance, the diameter of feedback hole was the second, the length of the feedback hole follow and the spring stiffness is the smallest.
Key words: hydraulic pile hammer; main control valve; reversing performance; pile driving; Stateflow
Һѹ�����Ĵ����������������Ч�ʸߣ�����ܿ��Ե��ڣ�������ʩ���в�������������ȾС[1]�����Ѿ���Ϊ���ʹ��Ļ������Ʒ���ڴ������еõ�Խ��Խ�㷺��ʹ�á�Һѹ��������ϵͳ��Ϊ�����ĺ��ĵõ��˹㷺���о���Patrick��[2]�����һ��ͨ����������ƴ�������ܺʹ��Ƶ�ʵķ�����James[3]���ô�Һѹ���������ˮ�´����Ŀ��Ʒ��������Ǵ�����������Ƶ�������ڡ�Iskander[4]��ϸ�������˵����õ�Һ��������ƺͿ��ơ������ҵ�[5]����˲�����Һ���Ͽ��ƴ��������ķ���������������ֻ��ͨ���г̷��м����ڡ�Һѹ�����Ĵ�Ƶ�ʸߣ��Ի����ƽ�ȺͿ�����Ҫ���[6-8]�������г̿��ػ�ӽ����ؿ��Ƶ�ŷ����ƴ������������Ļ���������ϵͳ�����ʸߣ��ɿ��Խϲ�[9-12]��Һѹ���Գ������ϵͳ�˷��˵�ŷ�����ʱ�����ĸ��Գ����ʹҺѹ�����Ļ�����̸���ƽ�ȿɿ���ͬʱҲʹ����ܺͳ��Ƶ��ʵ���������ڣ�������Һѹ���������÷�Χ�����ط���Һѹ�������ʱ���Գ����ʵ��ƽ�ȿɿ�����Ĺؼ�������������Ҫ������ʵ����������ȵ����ơ�Һѹ����Ҫ�����ڸ�Ƶ���¹�����Ҫ�����ط����кܸߵĻ������ܡ�
1 ���ط�����ԭ�����ṹ
1.1 ���ط�����ԭ��
ͼl��ʾΪҺѹ�������Գ������ϵͳҺѹԭ��ͼ����ʼ״̬�£�����2������λ���г̿��Ʒ�3������λ�����ط�12������ǻѹ���͵����������ô�����λ����������13ʱ�����ط�12��˵Ļ�����AK������ϵͳѹ��ps����˵�Բ����AK1�����п���ѹ��pk�����Ҷ˵Ļ�����AK2���ѹ�ͽ�ͨ���Ҷ�Բ����AK3�����ϵĵ���ǻ��ͨ�����⼸��ѹ���������£����ط�12������λ��������5�Ŀ���ǻͨ�����ط�12��B�ں�T������ͽ�ͨ��������5���½���9�Ŀ���ǻͨ�����ط�12��A�ں�P�����ѹ�ͽ�ͨ���½���9�رա����������A7�͵��������B8ʵ����������5���½���9���ȹغ�����������������2���������г̷�3����ʹ��˵Ļ�����AK���Ҷ˻�����AK2����ͽ�ͨ������2��������ѹ������ǻ������ǻѹ�����ߡ�������ǻѹ�����ڿ���ѹ��pkʱ�����ط�12��������λ��������5�Ŀ���ǻͨ�����ط�12��B�ں�P�����ѹ�ͽ�ͨ��������5�رա��½���9�Ŀ���ǻͨ�����ط�12��A�ں�T������ͽ�ͨ���½���9����4��ǻ�����ͨ������2�ڵ���ѹ�������ص����������䡣��ʱ�����ط�12��˵Ļ�����AK�����ͨ����˵�Բ����AK1�����ÿ���ѹ��pk�����Ҷ˵Ļ�����AK2������ϵͳѹ��ps���Ҷ˻�����AK3���ĵ���ǻ��ͨ�����Ŵ���2�����䣬�ĵ���ǻѹ����С���������г̷�3����ʱ�����ط���˵Ļ��������ѹ�ͽ�ͨ�����ط��������ѭ����ʵ�������������岹�ͷ�11ʵ������ǻ�IJ��ͺͻ���ǻ�İ�ȫ������
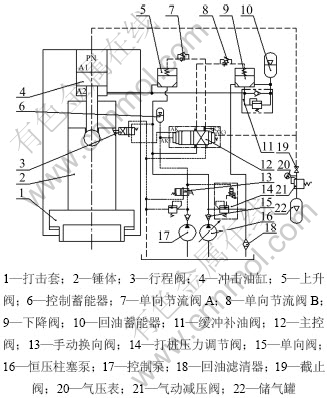
ͼ1 Һѹ�������Կ���ϵͳ����ԭ��
Fig.1 Scheme of flexible control system for hydraulic pile hammer
1.2 ���ط��ṹ
���ط��Ľṹ����ͨ��λ��ͨҺ�ػ����ӣ�����Ҫ�ص��Ƿ�о�����2��Һѹ���ƿڣ���о�Ҷ���һ��ѹ���ƿڣ��ڷ����ڲ�����һ����ǻ�뷧о�Ҷ���ͨ��ͨ���������ƿ���ѹ���ı仯����ʵ�ַ�о�Ļ����ܣ���ͼ2��ʾ��Ϊ�ӹ�����ķ��㽫�����������Σ���������2������4��������5���Ҷ˸�7��������5�Ļ���ǻͨ�������Ϳ���B����ͨ����ʹ�����ط����м��书�ܣ���һ�����ط������г̷����ݵ��źŻ�������λ������һֱʹ��о������λ��ֱ������ǻѹ�����ڿ���ѹ���Ļ����źŴ������˺����ط���һֱ������λ��ֱ���ٴδ����г̷���װ��ʱ����о4�ڵ���6��Ԥѹ���������´�����λ����о4�ͷ���3������������ʽ��������ѹ����������ʱ��Ƶ��ѹ�źŵĸ��š���ϵͳѹ��������AK��������ѹ��������AK1��ʱ����о�ƶ�����������λ����AK3������ѹֵ����AK1�Ŀ���ѹ��ʱ����о�ƶ�����������λֱ���������г̵�λ��ͨ������AK1��ѹ��pk����ʵ�ֶԴ�������ܵĵ��ڡ�
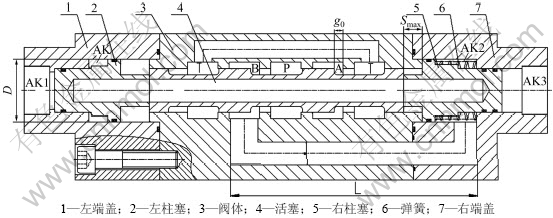
ͼ2 ���ط��ṹ
Fig.2 Structure of main control valve
2 ���ط�������������
Ϊ������ط���������ԣ�ƽ���ԵIJ��ԣ���ֱ�ӵIJ��Է����Dz������ط���о��λ��ʱ�����ߡ����ǣ����ط����˶����п��ƻ�·��λ�ƴ������İ�װ�����㣬��˱��IJ��ò�װ������ǻ��ѹ��ͻ�����ж����ط��Ƿ����ڴ���ϵͳ�Ļ���������˲��ò���ѹ�����������ط����ܵķ�������ͼ3��ʾ�����Թܵ���Ӱ�죬��װ������ǻѹ��ͻ���ʱ�̿�����Ϊ�����ط�������ϵ�ʱ�̣�������ǻѹ������ѹ��ͻ������ʱ��Ϊ���ط�����ʱ�䡣
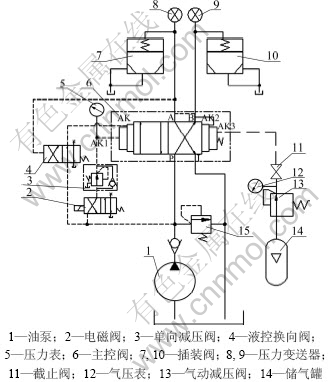
ͼ3 ���ط�������������ԭ��ͼ
Fig.3 Experiment scheme for reversing performance of hydraulic pile hammer
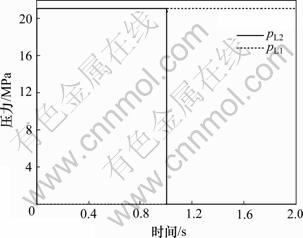
�����ط��������ܲ��ԵIJ����趨ʱ���ȵ��ڷ��Ҷ�Բ�����AK3���õ�ѹ����1.7 MPa����ͨ�����ڼ�ѹ��13�ͽ�ֹ��12���۲�ѹ����11����ʵ�֡�����������15��ϵͳѹ������21 MPa��ʹ��ŷ�2�õ磬���ڵ����ѹ��3���۲�ѹ����5ʹ���Բ�����AK1����ѹ��Ϊ2.2 MPa��ʵ�����ʱ����ŷ�2�õ�1 s��Ͽ���Ȼ�ָ�״̬��������8��9����ѹ���ֱ�Ϊ��װ��7����ǻѹ��pL1�Ͳ�װ��10����ǻѹ��pL2������2 s�ڵ�������ͼ4��ʾ��
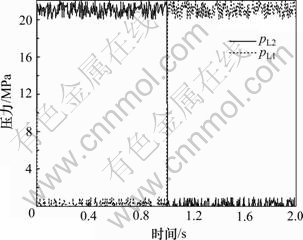
ͼ4 pL1��pL2��������
Fig.4 Test curves of pL1 and pL2
���Ե����ݱ��������ط���0~1 s�����˶�����λʱ��ѹ��pL1��2 ms���Ҵﵽϵͳ�趨ѹ������4 ms���ҿ�ʼ�½������ط������λ������5 ms����ʱѹ���ȶ���0 MPa����������ѹ��pL2��4 ms���ҿ�ʼ��������5 ms�����ȶ���21 MPa�������������ط���1~2 s�����˶�����λʱ��ѹ��pL1��1.028 s���ҿ�ʼ���������ط������λ������1.03 s�����ȶ���21 MPa����������ѹ��pL2��1.028 s���ҿ�ʼ�½�����1.03 sʱ�ȶ���0 MPa����������
3 ���ط��������ѧģ�ͼ�����
3.1 ���ط��������ѧģ��
��ţ�ٶ�����֪�����ط���о���˶�������ʽ(1)��ʾ��
![]()
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
![]() (4)
(4)
���У�mΪ��о������kg��SΪ��оλ�ƣ�m��pAKΪ����滷����������õ�ѹ����Pa��![]() Ϊ���������DΪ��ǻ��dspΪ��оֱ����pAK2Ϊ�Ҷ��滷����������õ�ѹ����Pa��
Ϊ���������DΪ��ǻ��dspΪ��оֱ����pAK2Ϊ�Ҷ��滷����������õ�ѹ����Pa��![]() Ϊ����Բ�������m2��pKΪ���Բ����������õ�ѹ����Pa��pNΪ�Ҷ���Բ����������õ�ѹ����Pa��KΪ���ɸնȣ�N/m��x0Ϊ���ɳ�ʼѹ������mm��fΪ��о�뷧��֮���Ħ������N��FsΪ��̬Һ������N��FtΪ˲̬Һ������N����Ϊ��Һ�����ȣ�Pa��s��LfΪ��о�糤�ȣ�m��rcΪ��о�뷧��ľ����϶��m����pΪ����ѹ�Pa��CdΪ������ϵ������Ϊ��Һ�����ܶȣ�kg/m3��g0��о��ʼ״̬��������
Ϊ����Բ�������m2��pKΪ���Բ����������õ�ѹ����Pa��pNΪ�Ҷ���Բ����������õ�ѹ����Pa��KΪ���ɸնȣ�N/m��x0Ϊ���ɳ�ʼѹ������mm��fΪ��о�뷧��֮���Ħ������N��FsΪ��̬Һ������N��FtΪ˲̬Һ������N����Ϊ��Һ�����ȣ�Pa��s��LfΪ��о�糤�ȣ�m��rcΪ��о�뷧��ľ����϶��m����pΪ����ѹ�Pa��CdΪ������ϵ������Ϊ��Һ�����ܶȣ�kg/m3��g0��о��ʼ״̬��������
�����ܵ�Һ��ЧӦ�������ط���AKǻ���Ϳ�Ӧ�������Է����У�
![]() (5)
(5)
���У�![]() ��psΪϵͳѹ����Pa��dL1Ϊ����ֱ����m��
��psΪϵͳѹ����Pa��dL1Ϊ����ֱ����m��
![]() (6)
(6)
����![]() ��
��![]() ��
��
V1ΪAkǻ�����m3��EΪ��Һ���������ģ����Pa��
�����ط���AK2ǻ���Ϳ�Ӧ�������Է����У�
![]() (7)
(7)
����![]()
![]() (8)
(8)
dr1Ϊ�����Ϳ�ֱ����m��![]() ��LΪ�����Ϳ׳��ȣ�m��
��LΪ�����Ϳ׳��ȣ�m��
�Բ�װ��7�Ŀ���ǻӦ�������Է����У�
![]() (9)
(9)
���У�![]() ��pAΪ���ط�A��ѹ����Pa��pL1Ϊ��װ������ǻѹ����Pa��
��pAΪ���ط�A��ѹ����Pa��pL1Ϊ��װ������ǻѹ����Pa��
![]()
![]() (10)
(10)
���У�VL1Ϊ��װ��7����ǻ�������m3��
�Բ�װ��10�Ŀ���ǻӦ�������Է����У�
![]() (11)
(11)
![]() (12)
(12)
���У�VL2Ϊ��װ��10����ǻ�������m3��
3.2 ���ط�����ķ���ģ��
���ط�������̰���4���˶�״̬���⼸��״̬�ǰ�һ������ת��ѭ�����еġ���Simulink��ʵ�����ط��������ģ�����Ĺؼ��ǽ��״̬ת�����⡣ʹ��Stateflow���ɼ������Ƕ�뵽Simulink�У����Է���Ľ��Simulink�е�״̬ת������[13-14]����Stateflow�н��������ط��˶�״̬ת��ͼ��ͼ5��ʾ��������ط������˶�����ѧģ�ͣ���Simulink�н�����ģ����ͼ6��ʾ��
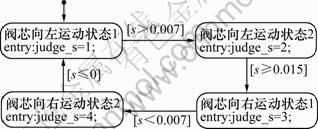
ͼ5 ���ط���о�˶�״̬ת��ͼ
Fig.5 States transfer for spool movement of main control valve
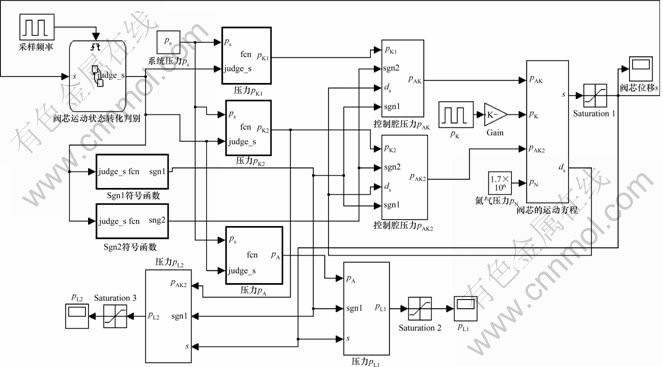
ͼ6 ���ط�������̵ķ���ģ��
Fig.6 Simulation model for main control valve reversing
3.3 ������
�þ��β�ģ����˿���ѹ���仯������������1��ʾ������ode15s(stiff/NDF)�㷨��ģ�ͽ�����⣬����pL1��pL2��������ͼ7��ʾ��
ͼ7�ķ������ݱ��������ط���0~1 s�����˶�����λʱ��ѹ��pL1��2.1 ms��ﵽ21 MPa����4.5 ms��ʼ�½�����5.4 msʱѹ��pL1�ȶ���0 MPa��ѹ��pL2��3.9 msʱ��ʼ��������5.2 msʱ�ȶ���21 MPa�����ط���1~2 s�����˶�����λʱ��ѹ��pL1��1.004 2 sʱ��ʼ��������1.058 6 sʱ�ȶ���21 MPa��ѹ��pL2��1.003 6 sʱ��ʼ�½�����1.005 4 sʱ�ȶ���0 MPa����0~1 s�ڣ���������ʵ������ȫ��ͬ��������1~2 s�ڣ����ط������˶��Ĺ����У������������������˴�Լ24 ms��ʵ����õĵ�ŷ���������ʱʱ��Ϊ0~30 ms[15-16]����������̵Ŀ���ѹ���ɾ��β�ģ��û�п��ǵ�ŷ���������ʱ����˺��Ե�ŷ�������Ӱ���������ʵ��������ȫ���ϵģ���ģ�Ϳ�������ģ�����ط��Ļ�����̡�
ͼ7 pL1��pL2��������
Fig.7 Simulation curve of pL1 and pL2
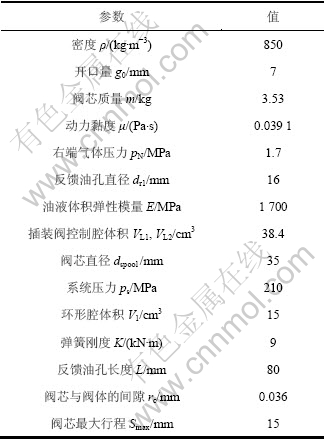
��1 ���ط�����ķ������
Table 1 Simulation parameters of main control valve reversing
4 ��������Ӱ������
ʵ�����ط������Գ������ϵͳ�Ŀ��ٿ��ƣ����ط����������Ҫ��ﵽ400~600 L/min�������ط������ͨ�����ɷ�оֱ��dsp������g0�ͷ�о���λ��Smax���������Ϊ��֤�����ط�ͨ��������Ҫ��������3�����ض����ط��������ܵ�Ӱ�졣�����ط������˶���������λ���з��棬ͨ����װ��7����ǻѹ��pL1�ı仯������ǻ��D�����ɸն�K�������ڷ����Ϳ�ֱ��dr1���Ϳ׳���L�����ط���������Ե�Ӱ�졣
ͼ8��ʾΪ��ǻֱ��D�����ط������Ӱ�졣����ֱ��D������pL1�仯��ǰ������ʱ����̣�����D������Ի�����ʱ�����̵�����Խ��ԽС��ֱ��D�Ի�����ʱ��Ӱ��ܴ����ط��Ļ���ʱ����D=55 mm������±�D=52 mm��ǰ��0.2 ms��
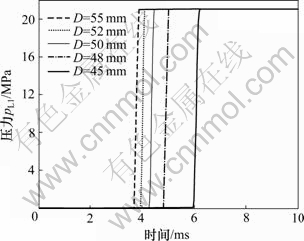
ͼ8 ��ǻ��D�����ط��������ܵ�Ӱ��
Fig.8 Effects of inner chamber diameter D on reversing performance of main control valve
ͼ9��ʾΪ���ɸն�K�����ط������Ӱ�졣���ŵ��ɸն�K�ļ�С��pL1�仯��ǰ������ʱ����̣����ǵ��ɸն�K�����ط�����ʱ���Ӱ���С��
ͼ10��ͼ11��ʾ�ֱ�Ϊ�����з����Ϳ�ֱ��dr1�ͳ���L�����ط������Ӱ�졣�����Ϳ�ֱ��dr1�ͳ���L�����ط��Ļ���ʱ���Ӱ��Ƚ����ԣ�����dr1���������ط���������ʱ�����̣�����L�ļ�С���ط���������ʱ��Ҳ���̡�
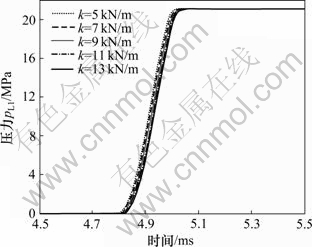
ͼ9 ���ɸն�K�����ط��������ܵ�Ӱ��
Fig.9 Effects of spring stiffness K on reversing performance of main control valve
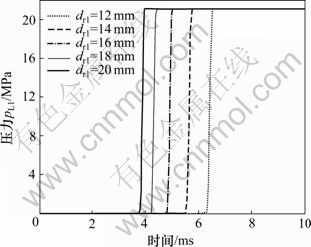
ͼ10 ��ֱ��dr1�����ط��������ܵ�Ӱ��
Fig.10 Effects of feedback hole diameter dr1 on reversing performance of main control valve
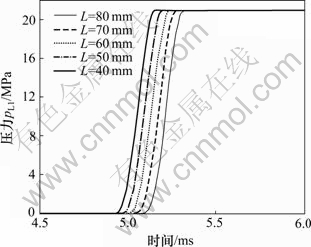
ͼ11 �����׳���L�����ط��������ܵ�Ӱ��
Fig.11 Effects of feedback hole length L on reversing performance of main control valve
5 ����
(1) ���Һѹ�����Ĺ����ص㣬�������ط��Ĺ���ԭ���ͽṹ�������ط���Ӧ��ʵ���˴����̵����Ի���ʹ���ܣ����Ƶ�ʵ������ڡ�
(2) �������ط���������ʵ�����ѧģ�ͣ�����Matlab��Stateflow�����ķ���ģ�ͽ��з�������������ʵ�������������Ե�ŷ�������Ӱ���������ʵ��������ȫ���ϡ�
(3) ���ط���������ʱ��������ǻֱ��D����������̣����ŵ��ɸն�K�ļ�С�����̣�����dr1����������̣�����L�ļ�С�����̡����У����ɸն�K��Ӱ���С��
�ο����ף�
[1] UFC 3-220-02P, Pile driving equipment[S]. 2004-01-16.
[2] Patrick D B, Mark T, David H. Pile driving control apparatus and pile driving system: United States, US7404449B2[P]. 2008-07-29.
[3] James E A. Deep water pile driver: United States, US20100012336A1[P]. 2009-05-18.
[4] Iskander M. Behavior of pipe piles in sand[M]. Heidelberg: Springer, 2011: 127-176.
[5] ������, ����, ������, ��. ����Һѹ����Һ����ϵͳ[J]. ���ִ�ѧѧ��: ��ѧ��, 2004, 34(4): 597-601.
L? Jing-zhong, SUI Zhen, YANG Yong-hai, et al. Hydro-pneumatic driving system of new type hydraulic pile hammer[J]. Journal of Jilin University: Engineering and Technology, 2004, 34(4): 597-601.
[6] ����ƽ, ����, �ι�ΰ, ��. �����������������ģ�͵���ֵ����[J]. �й���·ѧ��, 2010, 23(2): 122-126.
HU Jun-ping, GUO Yong, SONG Guang-wei, et al. Numerical analysis for impact model of pile hammer[J]. China Journal of Highway and Transport, 2010, 23(2): 122-126.
[7] ������, ��ѫ��, ������, ��. Һѹ������������ϵ�������鷽���о�[J]. ũҵ��еѧ��, 2005, 36(4): 597-601.
YANG Yong-hai, WANG Xun-long, L? Jing-zhong, et al. Study on performance evaluation system and testing methods of hydraulic pile hammer[J]. Transactions of the Chinese Society of Agricultural Machinery, 2005, 36(4): 597-601.
[8] ��͢, �μ���, ����, ��. �ش������ʽ��Ӧ�䶯�����ش�[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2008, 39(5): 1112-1118.
LI Ting, HE Ji-shan, XU Zhen-hua. Special large-scaled and knock -down hammer in high strain dynamic pile test[J]. Journal of Central South University: Science and Technology, 2008, 39(5): 1112-1118.
[9] ����ƽ, ʷ����, ����. ������Һ����Һѹ�����ķ����о�[J]. ���������, 2009, 26(8): 274-277.
HU Jun-ping, SHI Tian-liang, ZHANG Ling. Simulation of a new type hydro-pneumatic hydraulic pile hammer[J]. Computer Simulation, 2009, 26(8): 274-277.
[10] ���ƽ. �ܶ�����Ƶ����Һѹ��������о�[J]. ���ϿƼ���ѧѧ��: ��Ȼ��ѧ��, 2006, 21(1): 25-29.
YANG Guo-ping. Research of a full hydraulic pressure hydraulic impactor with strike energy and frequency adjusted independently[J]. Journal of Hunan University of Science & Technology: Natural Science Edition, 2006, 21(1): 25-29.
[11] Angadi S V, Jackson R L, Choe S Y, et al. Reliability and life study of hydraulic solenoid valve[J]. Engineering Failure Analysis, 2009, 16: 874-887.
[12] Li G, Wu M. Modeling and controlling of a flexible hydraulic manipulator[J]. Journal of Central South University of Technology, 2005, 12(5): 578-583.
[13] Aditya A, Gyula S, Gabor K. Semantic translation of Simulink/Stateflow models to hybrid automata using graph transformations[J]. Electronic Notes in Theoretical Computer Science, 2004, 109(14): 43-56.
[14] ������, Ԭ����, ���Ʒ�. ����MATLAB7.x\Simulink\ Stateflowϵ������������[M]. ����: ������ҵ��ѧ������, 2006: 176-213.
JIA Qiu-lin, YUN Dong-li, LUAN Yun-feng. System simulation and design based on MATLAB7.x\Simulink\Stateflow[M]. Xi��an: Northwest Industrial University Press, 2006: 176-213.
[15] ����˾, ����, ������, ��. ���ཻ��Һѹϵͳ��Ƽ����Է�[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2010, 41(4): 1348-1353.
DING Wen-si, WU Hui-yan, CHEN Li-na, et al. Design and characteristic analysis of single-phase pulsating flow hydraulic system[J]. Journal of Central South University: Science and Technology, 2010, 41(4): 1348-1353.
[16] �ɴ���. ��е����ֲᡪҺѹ����[M]. ����: ��ѧ��ҵ����, 2004: 497-502.
CHENG Da-xian. Handbook of mechanic design��Hydraulic transmission[M]. Beijing: Chemical Industry Press, 2004: 497-502.
(�༭ �°���)
�ո����ڣ�2011-09-01�������ڣ�2011-12-11
������Ŀ������ʡ�Ƽ����ƻ���Ŀ(2008JT1014)
ͨ�����ߣ�����(1983-)���У���������ˣ���ʿ�о���������Һѹ��е������о����绰��15974184466��E-mail: gy012702@126.com
ժҪ��Ϊ����Һѹ������Ƶ�����¶Ի�������Ե�Ҫ����Ʋ������ط����ƵĿ��ٻ������Գ��ϵͳ���÷�ͨ��4�����ƿ�ѹ���ı仯���Ʒ�о���˶���ͨ���ڲ������Ϳ�ʵ�ֶԻ���״̬�ļ��䡣�������ط�����������ԭ�����������ط�������̵Ķ�̬��ѧģ�ͣ�����Stateflow����������̵�״̬ת�����Simulink����������̵ķ���ģ�͡����ʵ�����ز��������ط�������̽��з������������õ��Ļ�������ʱ���ʵ��������һ�¡����÷���ģ�ͣ�������ǻֱ�����ڲ�������ֱ���ͳ����Լ����ɸն�4����Ҫ���ض����ط��������ܵ�Ӱ�졣�о�������������ط���ǻֱ�������ط���������Ե�Ӱ������ڲ������Ϳ�ֱ���ͳ��ȴ�֮�����ɸն�Ӱ����С��
