
DOI: 10.11817/j.issn.1672-7207.2016.10.043
����LOS������Ƿ����������ģ����
�����ɣ���׳����ƽ��������
(���������̴�ѧ ��������ѧԺ�������� ��������150001)
ժ Ҫ��
�����˸��ź�ģ�Ͳ�����ȷ����Ƿ���������������˶�ģ�ͣ����һ�ֻ��ڿ��Ӿ�(LOS)�����Ļ�ģ��������ͨ������л���˷�������ȷ���Լ������Ŷ��Է������ƴ��������ѣ����ڻ�ģ���ƵĻ����������ͨ�˲������������Ŷ��ͻ�ģ�л�����������ĺ�Ư�ٶȺ���ҡ�ٶȵĸ�Ƶ��ʵ���ٶȵĹ⻬���ơ�����������ŵ�����۶Կ����㷨���ȶ��Խ���֤����������һ�ҵ��崬����ֵ����ʵ�顣�о��������������ƵĿ���������Ч�ģ��Ҿ������õ�³���ԡ�
�ؼ��ʣ�
Ƿ����������·�����������Ӿർ������ģ������³������
��ͼ����ţ�TP273 ���ױ�־�룺A ���±�ţ�1672-7207(2016)10-3605-07
Sliding-mode control of underactuated ship based on LOS guidance
QIN Zihe, LIN Zhuang, LI Ping, LI Xiaowen
(College of Shipbuilding Engineering, Harbin Engineering University, Harbin 150001, China)
Abstract: Considering the nonlinear mathematic model of underactuated ship with external random wave disturbance and uncertain parameters, a sliding-mode controller based on the line of sight (LOS) guidance was proposed. The difficulty in feedback control resulted in parameters uncertainty and wave disturb was solved by designing the switch surface. Under the sliding-mode condition, a low-pass filter was introduced to the controller, thus, the high-frequency oscillation of sway velocity and yaw rate caused by disturbance and switch surface itself were eliminated, and the smooth control of velocities was achieved. The control stability was proved by using Lyapunuov theory. The result shows the controller is effective and is of good robustness.
Key words: underactuated ship; path following; line of sight guidance; sliding-mode control; robustness
��Ƿ���������Ĺ켣���ٺ�·�����ٿ��ƶ��ԣ���Ҫ�ѵ�����ֻ����ҡ�������ٶ���ֱ�������ģ�����Ư�ٶ��������������ǵ������ԣ�����Ƿ����������Ŀǰˮ�洬�����ձ���õ���ʽ[1]��Ϊȷ��Ƿ���������ĺ��а�ȫ��ͬʱ����Զ���ʻ����Ч�ʣ����Ƿ���������Ŀ����㷨�о�����ͻ����ʵ�����塣��Ƿ����ϵͳ�Ŀ����㷨���棬��������о��ɹ�[2-4]��Ŀǰ���õ�Ƿ�������Ʒ����з���������ģ���ۡ��������ۡ�������ŵ�����۵ȡ���Ө��[5]���ڷ������Ͳ�������Ӧ�ķ��������δ֪�����Լ�ģ�Ͳ�����ȷ�������Ƿ����AUV����ά·�����ٽ������о���DO��[6]���ڼ���ϵͳ������������˹ͶӰ�㷨����Ƿ����������·���������������³������Ӧ�㷨�о������ڵ�[7]Ϊ���Ƿ�������ӵı�ӿ������⣬��Ϸ��������쵼-���淨����˱�ӿ�������ʵ���˶�Ƿ����ϵͳ��λ������ͺ����ȶ��Կ��ƣ���δ�Ƽ������Ŷ���Ӱ�졣��ģ�������ھ��б�ṹ���ص㣬��Ӧ��ģ�Ͳ�����ȷ��������ʱ�䡢δ��ģ��̬�Լ�����н��Ŷ��ȷ�����������õ�³����[8-10]��������ʵ�ʺ��������л��ܵ��������Ŷ����˶���������װ��������仯������״���Ժ��������IJ���Ӱ�죬��ģ���ƾ�����Ч�ؽ����FANG��[11]�о��˴�����������������ò�ͬ�Ļ�ģ���������к������ټ�����ҡ�������[12]��Դ�����������Ժʹ���������ȷ������µĺ�����ƣ����ڲ�������Ӧ��ԭ���������һ�ַ�����ģ��������OH��[13]����LOS·������������Ƿ������·�����ٽ�����ģ��Ԥ����ƣ���������ƵĶ���߶������ɲ�����ɶ�����·���ĸ��١�Ϊ�ˣ��������߽�������о��ɹ�����LOS����Ϊ�������к�����ƣ�������·�����и��٣�Ȼ�����û�ģ��ʵ������ǵ����������ͬʱ��ɶ�Ƿ�������ֵ���ͨ��������ƻ�ģ�л��棬��������˶�������ȷ���Լ����������˸��ŵ����⡣Ϊ������Ƶ�Ŷ��IJ���Ӱ�죬���Ϳ���������ƽ��㸽���ķ�ֵ���ڷ��������м����ͨ�˲�����ʹ�����ٶ���⻬���ȶ���
1 Ƿ���������������˶�ģ��
1.1 ��������ѧģ��
��������Ƿ������������������������Գƣ���������ҡ����ҡ�����Բ��ƣ���������ϵ��ԭ�����ڴ��������ϡ���ˣ���������[14-15]��֪�����������ɶ��˶�ѧ�������Զ���ѧģ�����£�
 (1)
(1)
 (2)
(2)
ʽ�У�x��y��ʾ���ڴ������ϵ�µ�����λ�ã� Ϊ��������ǣ�u��v��r�ֱ�Ϊ����ǰ���ٶȡ���Ư�ٶȺ���ҡ���ٶȣ�ǰ��������u����ҡ���ئ�rΪϵͳ�����������m11��m22��m33Ϊ�����Ĺ���ϵ����du��dv��drΪ��������ϵ����d|u|u��d|v|v��d|r|rΪ����������ϵ������Ϊ�����Ҽٶ��䶨������u����v�ͦ�rΪ�����ܵ�������Ŷ��������r��������������������
Ϊ��������ǣ�u��v��r�ֱ�Ϊ����ǰ���ٶȡ���Ư�ٶȺ���ҡ���ٶȣ�ǰ��������u����ҡ���ئ�rΪϵͳ�����������m11��m22��m33Ϊ�����Ĺ���ϵ����du��dv��drΪ��������ϵ����d|u|u��d|v|v��d|r|rΪ����������ϵ������Ϊ�����Ҽٶ��䶨������u����v�ͦ�rΪ�����ܵ�������Ŷ��������r��������������������
����1 ����Ŷ���u����v�ͦ�r��С�н磬���� ��
��
����·������ֻҪ������ij������·������������ʱ���λ�õ�Լ�����ڴ�����£����ع���ʱ���뺽�ٵĹ�ϵ��Ϊ�˼��о�������Ժ㶨������ǰ��������uΪ������
1.2 ����Ŷ�ģ��
�����������ڴ����ϵ�����Ŷ��У�����������Ҫ�ģ��Ժ������Ч��ռ������λ����ˣ�����ֻ���Dz����Ŷ���Ӱ�졣����ģ�Ϳɶ�������[16]��
 (3)
(3)
ʽ�У�wv��wr�ֱ��ʾ�������ܶ�Ϊ0.000 5��0.1�����ֵ��˹��������h(s)Ϊ���ײ��˴��ݺ�����
 (4)
(4)
 Ϊ����Ƶ�ʣ�
Ϊ����Ƶ�ʣ� ��
�� Ϊ���泣����
Ϊ���泣���� ��
�� Ϊ����ǿ��ϵ����
Ϊ����ǿ��ϵ���� ��
�� Ϊ����ϵ������ȡ��������
Ϊ����ϵ������ȡ�������� =6 s�����岨��h1/3=2.5 m��=0.3��=0.255��=0.527��=0.808����ʱ�ⲿ�����ﵽ4���������ޡ����ˣ������������Ŷ��ķ���ģ�⡣
=6 s�����岨��h1/3=2.5 m��=0.3��=0.255��=0.527��=0.808����ʱ�ⲿ�����ﵽ4���������ޡ����ˣ������������Ŷ��ķ���ģ�⡣
2 LOS��������ģ���������
2.1 LOS�������
������������
 (5)
(5)
ʽ�У� ��
�� ����Ϊ����·����������Ϊ�ٶȷ���ǣ�����
����Ϊ����·����������Ϊ�ٶȷ���ǣ�����
 (6)
(6)
x(��)��y(��)���ڦȶ��ο����Ҧ�d��������[17]��
 (7)
(7)
�������·��ţ�
 ��
��
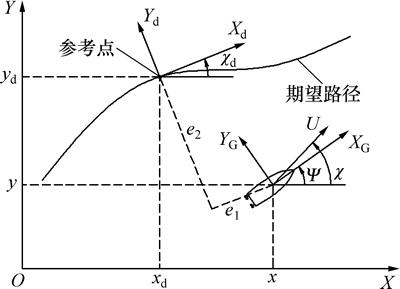
ͼ1 �������任ʾ��ͼ
Fig. 1 Illustration of error variances transformation
��ʽ(5)�������У�
 (8)
(8)
ʽ�У� ��
�� ��
�� ��
��
����LOS�����㷨[13]��·��������ѡȡ[5]�У�
 (9)
(9)
ʽ�У�����0���ģ�0��k1��0��Ϊ��Ʋ�����
����������������
 (10)
(10)
�����������Ϊ
 (11)
(11)
�Ӷ��ٶȷ������������¹�ϵ��
 (12)
(12)
Ϊ����� ���֣���������˲���[18]��
���֣���������˲���[18]��
 (13)
(13)
ʽ�У���1��0����1��0�� ��
�� ��
�� �ֱ�Ϊ�˲������������Ǽ�һ��������ֵ��
�ֱ�Ϊ�˲������������Ǽ�һ��������ֵ��
2.2 ����ǻ�ģ����
���ȶ��������������һ��ģ�棺
 (14)
(14)
 (15)
(15)
ʽ�У���1��0����2��0��
��ʽ(15)��������


 (16)
(16)
ѡȡ��������rΪ

 (17)
(17)
ʽ�У� ��
�� ��
�� ��
�� ��
�� �ֱ�Ϊ����m11��m22��m33��dr��d|r|r�Ĺ���ֵ���Ҿ�Ϊ������
�ֱ�Ϊ����m11��m22��m33��dr��d|r|r�Ĺ���ֵ���Ҿ�Ϊ������
��һ�����������������


��������������������������
����2 ��������ֵ������н磬��

����������ŵ����V1Ϊ
 (18)
(18)
��ʽ(18)����






 (19)
(19)
�Կ��Ʋ����ӽ�����ƣ���
 (20)
(20)

 (21)
(21)
ʽ�У���0��0����ʽ(20)��(21)����ʽ(19)��

��ģ��S��������ʱ���ڴﵽS=0����ʼ�ձ������У���ʹ����������ȶ�����

Ϊ��������ź���sgn(��)����������ĸ�Ƶ�������⣬���뱥�ͺ���sat(��)[19]���䶨�����£�
 (22)
(22)
ʽ�У���Ϊ�߽���ȡ�
2.3 ��ͨ�˲������
���ڸ�Ƶ�����Ŷ��ij���Ӱ�죬��������������ʱ���ڴﵽԤ��ƽ��㣬��Χ��ƽ����Ƶ���⽫���������������ԵIJ���Ҫ�����Ϳ������ܡ�Ϊ�˷������Ŷ������IJ���Ӱ�죬�����ͨ�˲��������ٶȽ��й��ƣ����ٶȵĹ���ֵ���뷴�����У���ȥ�ջ����������еĸ�Ƶ�����Ŷ���[20]����ͨ�˲���������£�
 (23)
(23)
�����¶����������
 (24)
(24)
ʽ�У���2����3����4����2����3�ͦ�4��Ϊ����0�ij�����
���ʽ(17)��(22)~(24)�õ�����������ҡ���ص�������ʽ��

 (25)
(25)
2.4 �ȶ��Է���
��������������ŵ������
 (26)
(26)
��ʽ(26)����ʽ(10)�����



 (27)
(27)
ʽ�У� ��
��
ͨ��ѡȡk1����2ΪС�����Ӷ���



 (28)
(28)
ʽ�У� ��
�� ��
��
���� Ϊ�н�����С���������Ӷ�ϵͳ(e1��e2��
Ϊ�н�����С���������Ӷ�ϵͳ(e1��e2�� )��������ʱ�������������������������㸽����1����С������������ʱ�������λ�ü���̬�������������ո������·��ǰ����
)��������ʱ�������������������������㸽����1����С������������ʱ�������λ�ü���̬�������������ո������·��ǰ����
3 ������֤�����
������֤��������[6]�ṩ�ĵ��崬�˶��������ô���Ϊ38 m������Ϊ118 t�����˶�����Ϊ��m11= 120 t��m22=217.9 t��m33=63 600 t��du=215��102 kg/s��dv=117��103 kg/s��dr=802��104 kg/s��d|u|u= 0.2du��d|v|v= 0.2dv��d|r|r= 0.2dr�����=0.15����ȡ�����Ĺ���ֵΪ��

 ��
��
��������������Ϊ����=0.5����=20����=0.2��k1=1��10-6����=1�����ǵ���ʵ������������ǵ����ƣ�����ҡ���صĴ�С�н磬����ȡ|��r|max=5��103 kN��m��
�˲����������Ϊ����1=��2=��3=10����4=2.5����1=��2=��3=��4=10���������ʼ�������£�
[x(0)��y(0)��(0)��u��v(0)��r(0)��s(0)]=[-320��30����/4��10��0��0��-��]
��������·��������£�
ͼ2��ʾΪ�����Ŷ��� ��
�� �ϵķ�������ͼ2���Կ�����38 m����С�ʹ�����4�������º����ܲ����Ŷ�Ӱ��ܴ�v�ͦ�r�����ֵ�ֱ�ﵽ0.04 m/s2��0.5 (��)/s2�����봬��ʵ�ʺ�����������ͼ3��ʾΪ����������·���Լ�ʵ��·���������ߡ���ͼ3���Կ������ڴ�����������Ŷ��Լ������˶�������ȷ��������£����������ڿ������������¶�����·���������õظ��٣���x=600 m������ƫ������·����������Ƶ�����·�����⻬����ġ�
�ϵķ�������ͼ2���Կ�����38 m����С�ʹ�����4�������º����ܲ����Ŷ�Ӱ��ܴ�v�ͦ�r�����ֵ�ֱ�ﵽ0.04 m/s2��0.5 (��)/s2�����봬��ʵ�ʺ�����������ͼ3��ʾΪ����������·���Լ�ʵ��·���������ߡ���ͼ3���Կ������ڴ�����������Ŷ��Լ������˶�������ȷ��������£����������ڿ������������¶�����·���������õظ��٣���x=600 m������ƫ������·����������Ƶ�����·�����⻬����ġ�

ͼ2 �����Ŷ�����
Fig. 2 Components of wave disturbance
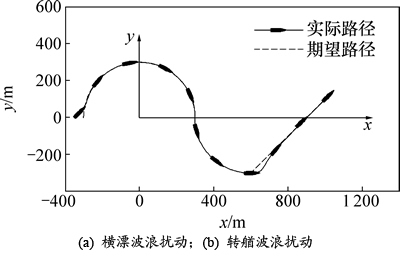
ͼ3 ���й켣ͼ
Fig. 3 Plot of sailing trajectory
ͼ4��ͼ5��ʾ�ֱ�Ϊ������λ�����(e1��e2)���ٶȷ��������R���ߣ���������Ѹ��������ʼ��ͼ6��ʾ����ҡ����������仯���仯��Դ������Ŷ��ij����������ڸó����仯�Ŀ������������£������ĺ�Ư�ٶȺ���ҡ�ٶ��ܱ������ƽ�ȡ���ͼ6�ɼ����ڵ�ͨ�˲����������£�������������ĸ�Ƶ��������ͬʱ��С����������㸽�������ֵ����ʵ��Ӧ�õĽǶ����ۣ�������Ϊ��ͨ�˲���������Ƶ���ٶ沢��������㸽���Ķ�ǣ�����ڽ��ٶ��ĥ��ͽ�ʡȼ�Ͷ�������Ҫ����ġ�ͼ7��ͼ8��ʾ�ֱ�Ϊ·�����ٹ����д�������ҡ���ٶȺͺ�Ư�ٶȣ��ڷ��������ɵ������£�v��r����������ƽ�ȣ���ƽ��㸽����������Ƶ�������ٶ���ĵ�Ƶ����Դ�Բ����Ŷ��ij������������ڸߺ����µĴ����˶����ֲ�����������ģ���ˣ�ͼ�е��������ǿ��Խ��ܵġ��ܽ�ͼ2~8���Եó�������ϵͳ�Բ�����ȷ��������Ŷ��������õ�³���ԡ�
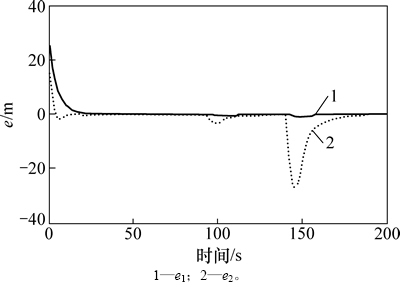
ͼ4 ����λ���������
Fig. 4 Error curves of ship��s position
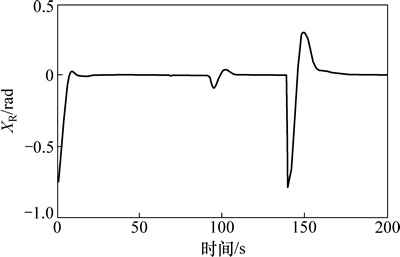
ͼ5 �ٶȷ�����������
Fig. 5 Error curve of speed orientation
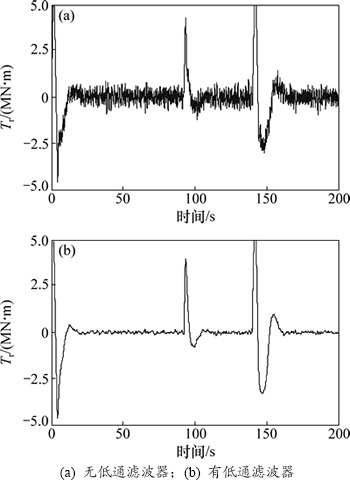
ͼ6 ��ͨ�˲������е�ͨ�˲���ʱ����ҡ��������
Fig. 6 Input of yaw moment without/with Low-Pass filter
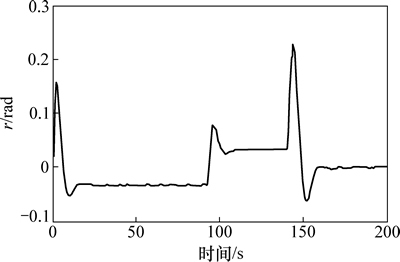
ͼ7 ��ҡ���ٶ�-ʱ������
Fig. 7 Plot of time-yaw rate
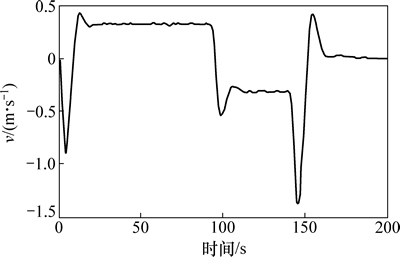
ͼ8 ��Ư�ٶ�-ʱ������
Fig. 8 Plot of time-sway velocity
4 ����
1) ��Դ����ķ������˶�ϵͳ�����LOS������Ϊ���������һ�ּ��Ŀ����㷨�����㷨����Ч��ʵ��Ƿ����״̬�´���λ�Ƽ�����ǵĿ�������ģ�л�������Ч���������Ŷ���Ӱ�죬ͬʱ����˴����˶�������ȷ�������⣬�Ӷ�ʵ��ϵͳ��³���ԡ�
2) �ڷ��������м���ĵ�ͨ�˲�����Ϊ�Կ����ɵ��������Ϻõؽ���˿������뼰�ٶ������Ŷ��������������⣬������㷨�Ŀ������ܡ�
3) ����ʵ����֤�˿����㷨�ܹ��˷�������˺�ģ�Ͳ�����ȷ����Ӱ�죬�������õظ��ٿ���Ч����³���ԣ���һ����Ч���еĿ��Ʒ�����
�ο����ף�
[1] DO K D, JINAG Z P, PAN J. Universal controllers of stabilization and tracking of underactuated ships[J]. Systems & Control Letters, 2002, 47(4): 299-317.
[2] SANTHAKUMAR M, ASOKAN T. Investigations on the hybrid tracking control of an underactuated autonomous underwater robot[J]. Advanced Robotics, 2010, 24(11): 1529-1556.
[3] DO K D. Formation control of underactuated ships with elliptical shape approximation and limited communication ranges[J]. Automatica, 2012, 48(5): 1380-1388.
[4] GHOMMAM J, MNIF F, BENALI A, et al. Nonsingular serret�Cfrenet based path following control for an underactuated surface vessel[J]. Journal of Dynamic Systems, Measurement, and Control, 2009, 131(2): 021006.
[5] ��Ө, �Ĺ���, ��Ϊ��. ���ں����۲�����Ƿ����ˮ�»����˽�����ά·������[J]. ����������Ӧ��, 2013, 30(8): 974-980.
YANG Ying, XIA Guoqing, ZHAO Weiguang. Path following in 3D for underactuated autonomous underwater vehicle based on ocean-current observer[J]. Control Theory & Application, 2013, 30(8): 974-980.
[6] DO K D, JIANG Z P, PAN J. Robust adaptive path following of underactuated ships[J]. Automatica, 2004, 40(6): 929-944.
[7] ����, ����. һ�ִ��ӱ�ӿ��Ƶ�backstepping����[J]. ���������, 2012, 27(2): 299-303.
DING Lei, GUO Ge. Formation control for ship fleet based on backstepping[J]. Control and Decision, 2012, 27(2): 299-303.
[8] PERERA L P, GUEDES SOARES C. Pre-filtered sliding mode control for nonlinear ship steering associated with disturbances[J]. Ocean Engineering, 2012, 51: 49-62.
[9] ������, ���, ��־��, ��. ��ֵԤ����ɢ��ģ���Ƽ���Ӧ��[J]. ���������, 2006, 21(7): 829-832.
SONG Lizhong, LI Huaishu, YANG Zhihong, et al. Discrete-time sliding mode predictive control algorithm and its application[J]. Control and Decision, 2006, 21(7): 829-832.
[10] NGO Q H, HONG K S. Sliding-mode antisway control of an offshore container crane[J]. IEEE/ASME Transactions on Mechatronics, 2012, 17(2): 201-209.
[11] FANG M C, LUO J H. On the track keeping and roll reduction of the ship in random waves using different sliding mode controllers[J]. Ocean Engineering, 2007, 34(3): 479-488.
[12] ����, ����, ����. ���� backstepping �Ĵ�������ģ����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2007, 38(Suppl 1): 278-282.
LIU Yu, GUO Chen, L Jin. Sliding-mode control of ship course tracking based backstepping[J]. Journal of Central South University (Science and Technology), 2007, 38(Suppl 1): 278-282.
Jin. Sliding-mode control of ship course tracking based backstepping[J]. Journal of Central South University (Science and Technology), 2007, 38(Suppl 1): 278-282.
[13] OH S R, SUN J. Path following of underactuated marine surface vessels using line-of-sight based model predictive control[J]. Ocean Engineering, 2010, 37(2): 289-295.
[14] DO K D. Practical control of underactuated ships[J]. Ocean Engineering, 2010, 37(13): 1111-1119.
[15] LIAO Yulei, ZHANG Mingjun, WAN Lei. Serret-frenet frame based on path following control for underactuated unmanned surface vehicles with dynamic uncertainties[J]. Journal of Central South University, 2015, 22(1): 214-223.
[16] LIU Wenjiang, SUI Qingmei, XIAO Hairong, et al. Sliding backstepping control for ship course with nonlinear disturbance obverse[J]. Journal of Information & Computational Science, 2011, 8(16): 3809-3817.
[17] GHOMMAM J, MEHRJERDI H, SAAD M, et al. Formation path following control of unicycle-type mobile robots[J]. Robotics and Autonomous Systems, 2010, 58(5): 727-736.
[18] PERERA L P, SOARES C G. Pre-filtered sliding mode control for nonlinear ship steering associated with disturbances[J]. Ocean Engineering, 2012, 51: 49-62.
[19] ����. Ƿ���������˶��ķ�����³�������о�[D]. ������: ���������̴�ѧ�Զ���ѧԺ, 2013: 56-70.
WANG Yan. Research on nonlinear robust control of underactuated surface vessels motion[D]. Harbin: Harbin Engineering University. College of Automation, 2013: 56-70.
[20] FOSSEN T I. Handbook of marine craft hydrodynamics and motion control[M]. John Wiley & Sons, 2011: 285-290.
(�༭ ����ƽ)
�ո����ڣ�2015-10-04�������ڣ�2016-01-16
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(61004008)����ˮ�ƽ������ص�ʵ���һ���������Ŀ(61422230302162223013) (Project(61004008) supported by the National Natural Science Foundation of China; Project(61422230302162223013) supported by the Laboratory of Science and Technology on Water Jet Propulsion)
ͨ�����ߣ���׳����ʿ�����о�Ա������Ƿ���������˶������о���E-mail��drlinzhuang@163.com
ժҪ�����Ǵ������������˸��ź�ģ�Ͳ�����ȷ����Ƿ���������������˶�ģ�ͣ����һ�ֻ��ڿ��Ӿ�(LOS)�����Ļ�ģ��������ͨ������л���˷�������ȷ���Լ������Ŷ��Է������ƴ��������ѣ����ڻ�ģ���ƵĻ����������ͨ�˲������������Ŷ��ͻ�ģ�л�����������ĺ�Ư�ٶȺ���ҡ�ٶȵĸ�Ƶ��ʵ���ٶȵĹ⻬���ơ�����������ŵ�����۶Կ����㷨���ȶ��Խ���֤����������һ�ҵ��崬����ֵ����ʵ�顣�о��������������ƵĿ���������Ч�ģ��Ҿ������õ�³���ԡ�
