
DOI: 10.11817/j.issn.1672-7207.2016.02.020
����������ʱ��Һ��϶���ѧ�ļ���ͼ��ģ
����ƽ����ƾ�
(���ϴ�ѧ ���繤��ѧԺ������ ��ɳ��410083)
ժ Ҫ��
�������������������ڵĸ��Ӷ�̬���ԣ������Ͼ�ȷ�ı��������ѧģ�͡����ȣ��������������������Ĺ���ԭ���ͽṹ�ص㣬���ü���ͼ���۶�ת���¡�����������ģ�黯��ģ�������������������Ԫ�Ķ��嶯��ѧģ�ͣ�Ȼ�����������Һѹϵͳ�������ļ���ͼģ�͡�ͨ����������ģ�͵Ķ�̬���Լ�����ù��ɣ����ݹ���������·������ͳһ��ʽ�������������Һ��϶���ѧ�ļ���ͼģ�͡��о���������������2ǻѹ������ֵģ���������������Ǻϣ�������ģ����Ԥ���Һ���������ϵͳ�Ķ�̬���ԣ���Ϊ��������߱�������Ķ���ѧ�����ṩ�ο���
�ؼ��ʣ�
��������������������̬����������ͼ�������
��ͼ����ţ�TP202 ���ױ�־�룺A ���±�ţ�1672-7207(2016)02-0495-08
Dynamics model of mechanical-hydraulic coupling of auger driller during luffing motion by bond graph
HU Junping, LI Kejun
(School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract: In order to describe the inherent complex dynamic characteristics of luffing mechanism of auger driller, the accurate mathematic model of the luffing mechanism was established. The working principle and structural characteristics of the luffing mechanism were firstly analyzed, the bond graph model of revolute joint, cylinder and column were bulit, and the multi-body dynamics model for the basis unit was also constructed. Then the bond graph of hydraulic system was obtained. Through the analysis of the dynamic characteristics and interaction rules of each sub model, according to the transmission path of power flow, the mechanical-hydraulic coupling dynamic bond graph model of luffing mechanism was developed in a unified way. The results show that the two chamber pressure simulation results of the luffing cylinder agree well with the experimental results, which indicates that the system dynamic characteristics can be forecasted by this model, which provides a theoretical basis for improving the dynamic performance of the luffing mechanism.
Key words: auger driller; luffing mechanism; dynamic characteristics; bond graph; coupling
���������һ���ʺϽ������������гɿ���ҵ��ʩ����е����ʩ��ʱ�����͡���Ⱦ�١���ҵ�ٶȿ졢��ҵ��Ա�ٶ��õ��㷺Ӧ�úͷ�չ����������Ľṹ��Ҫ�����ƻ�������ͷ����תƽ̨���������������ͷ����ɡ�������������������1���dz���Ҫ�Ĺ���װ�ã���Ҫ������֧�����ã��䶯��ѧ���ܶ����������Ҫ����ָ����µ�Լ�����������ѹ���Ͷ���ͷ������Ť�ص��кܴ�Ӱ�졣��������Ľṹ��ʽ��ͬ���䶯��ѧ����Ҳ��ͬ��Ŀǰ���Ա����������װ�õ��о�������ڵ���������������������ѧ[1-4]�������Ż����[5]���˶��켣�Ż�[6]����ǿ��[13-14]�Ȼ�е��������Ե��о�������������[15-16]�������ҵƽ����[17]�Ƚ������о��������������������������е��͵Ļ�е��Һѹһ�廯�����������ۺϿ��ǻ�Һ��϶��������ܵ�Ӱ�죬��ͳһ�ķ�ʽ���������������ѧģ�͡��Է�����ѧ��������ѧΪ�������������ķ������ڶ������ϵͳ���о����ԣ���Ϊ��ģʱ�ܻ��ijһ������м�������Ӧ���Դ������Ӷ�Ӱ�����ľ��ȣ�����ʵ�ط�ӳϵͳ������[1-2]������ͼ��Ϊ����������ṩ����Ч��;��������һ�ֻ��ڹ�����ͼ�λ������ϵͳ����ѧ���淽��[12]����ͳһ���������渴��ϵͳ�Ķ�̬���ԡ�������������ȣ��ý�ģ�����������ڹ�������������ʱ��Һ��ϵ��걸����ѧģ�͡�
1 ����������嶯��ѧ��ģ
����������������ͼ��ͼ1��ʾ���ɱ����(2��)��������������ɣ�ͨ���µ�(A��C��P)�������1������ҡ��������ɵ������������ѹ���͵����ƶ������ƽµ�Aת����������ˮƽλ�ÿ�ʼ�˶�������ֱλ����ֹ�����������������������ʱ�����̶��������ڻ�����������������ϵ��Ϊ���ڽ�ģ�������ϵͳ��е���ַ�Ϊ3����ϵͳ��1) ת������ϵͳ��2) ������ϵͳ��3) ����ϵͳ���ֱ�������ϵͳ�ļ���ͼģ�ͣ�����������������Ķ��嶯��ѧ����ͼģ�͡�

ͼ1 �������ʾ��ͼ
Fig. 1 Schemic diagram for luffing mechanism
1.1 ת���½�ģ
ת������ƽ���������ͼ��ģ�Ļ�����Ԫ֮һ����ͼ2��ʾ������������֮��ͨ��ת�������ӣ�֧������֮��ֻ�д��ڼ�϶�����Բ��ܱ�֤�˶���ƽ�ȣ����䵱����ת��Ħ����������ʹ������ʱ�����뱣֤һ����϶��ȷ��֧�к�����ڷ�����ӯ��ϡ�����һ���棬�ؽڼ�϶�����������غɡ�Ѹ��ĥ�������Ȳ���Ӱ�졣֧�к���֮�����2�������������ѹ��������������ѹ���������������ϣ���������ֱ�����ߣ���Щ���в�ͬ����ѧ������ʽ[7]�������о�������϶�ĵ���ת���£����Ը�Ħ������ʱ������Ϊ0 N��������(�µ��Լ����)�ɰ���ʽ���㣺
 (1)
(1)
ʽ�У� ��
�� ��
�� �ֱ�Ϊ֧���������ĵ�ľ������ꣻ֧������Ӵ��ĵ���ϵ��K��ͨ�����������Ԫ����ȷ��������ϵ���͵���ϵ�������ȣ���B=��K��
�ֱ�Ϊ֧���������ĵ�ľ������ꣻ֧������Ӵ��ĵ���ϵ��K��ͨ�����������Ԫ����ȷ��������ϵ���͵���ϵ�������ȣ���B=��K��
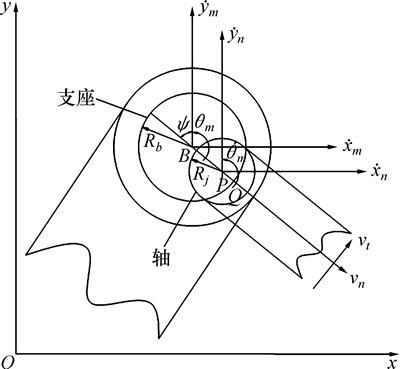
ͼ2 ת����
Fig. 2 Schema for revolute joint
FILIPPOV[8]�����˲�ͬ����ʱ�˵�ȡֵ��Ϊ�����ü���ͼ���ʽ(1)�ɱ�ʾ�����±�����ʽ��
 (2)
(2)
ת���¼���ͼģ����ͼ3��ʾ��������C����R���ϵ���������Լ����ϵʽ�Ƶ��������ڽµ㴦�ĵ���������������ת��Ħ������(��������Ϊ0 N�����ĺ��Բ���)���õ�ת���¼���ͼģ�ͣ�Ҳ����RC����������ʽ�����յر���µ����ͼģ��(ͼ3)��
1.2 ������ģ
������ת���ٶ�С������նȴ��Խ�֮��Ϊ���嵥Ԫ����ͼ4��ʾ����������ϵԭ��̶�������������G�ϣ� ��������������������֪�����������ꡢ�µ�ľֲ����꼰������ϵ��Թ�������ϵ��ת��
��������������������֪�����������ꡢ�µ�ľֲ����꼰������ϵ��Թ�������ϵ��ת�� ʱ����������������������ת�����ɣ��������κ�1��(��i����)�ľ����������ͨ�����¹�ϵʽ����õ���
ʱ����������������������ת�����ɣ��������κ�1��(��i����)�ľ����������ͨ�����¹�ϵʽ����õ���
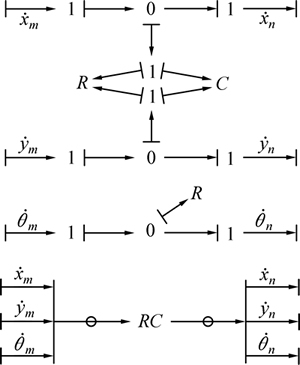
ͼ3 ת���¼���ͼģ��
Fig. 3 Bond graph model of revolute joint
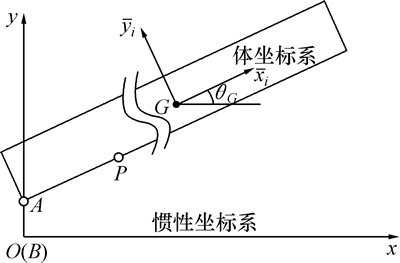
ͼ4 ������ͼ
Fig. 4 Schema for column
 (3)
(3)
ʽ�У��� Ϊ�����ϵ�i(�µ�A��P)������������ϵ�е����꣬xG��yGΪ�����������ڹ�������ϵ�е����ꡣ
Ϊ�����ϵ�i(�µ�A��P)������������ϵ�е����꣬xG��yGΪ�����������ڹ�������ϵ�е����ꡣ
��ʽ(3)�ã�
 (4)
(4)
�� ��
��
 ����֮����ʽ(4)�ɵ�
����֮����ʽ(4)�ɵ�
 (5)
(5)
ͨ��ʽ(5)��ʾ�ٶȡ����ٶ�Լ����ϵ���ɵ�ͼ5��ʾ����������ͼģ�͡�ģ����ֻ������2���µ�(�µ�A��P)�����ɸ��ݹ����ĸ��ӳ̶������µ���Ŀ��ͨ���µ��������������½ӣ���������֮���Լ����ϵ��ͼ5�У���Ԫ1�ϵı���ML��JL�ֱ������ϵ������������������ת����������Ԫ1���ϵı��� ��
�� ��
�� ��
�� �ֱ��ʾ��������ϵ�и������ĵ����ٶȼ�������ϵ��Թ�������ϵ��ת���ٶȡ����ʼ��м�λ�õ�СԲȦ��ʾ�˼�Ϊ�����������ϳ����������ʾ�ɽ���������ɱ�������Ҳ�ɽ��������ϳ��������������ڸ�����ʩ��������ת�أ�ֻ�������ת�ص�Ч������������ϣ���������������Դ���ڼ���ͼ����Ӧ��1���ϣ��罫����������������ԴSE��-MLg���ӵ�1(
�ֱ��ʾ��������ϵ�и������ĵ����ٶȼ�������ϵ��Թ�������ϵ��ת���ٶȡ����ʼ��м�λ�õ�СԲȦ��ʾ�˼�Ϊ�����������ϳ����������ʾ�ɽ���������ɱ�������Ҳ�ɽ��������ϳ��������������ڸ�����ʩ��������ת�أ�ֻ�������ת�ص�Ч������������ϣ���������������Դ���ڼ���ͼ����Ӧ��1���ϣ��罫����������������ԴSE��-MLg���ӵ�1( )���ϡ�
)���ϡ�
ͨ�������˶�Լ����ϵ�����ļ���ͼģ��ͬʱ�����˶���ѧ��������ͼ5�ɵ��������Ĵ��������ص�ƽ�ⷽ�̣�
 (6)
(6)
ʽ�У�Fxi��FyiΪ��i���ڵ�x��y�����ϵ�����FxG��FyG��MzG�ֱ�Ϊ������x��y����������z�᷽������ء�ʽ(6)�Ķ���ѧ������ֱ�Ӷ�ͼ4Ӧ��ţ�١�ŷ������ѧ�������õĽ����һ�µġ��ɼ���ͼ5��ʾ�ļ���ͼģ�ͻ��ڹ����غ㣬�����յر������������ĺͽµ���˶�Լ��������ѧ��ϵ��
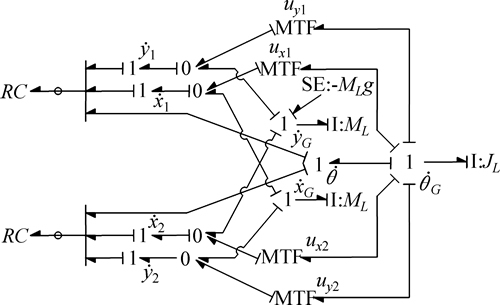
ͼ5 ��������ͼģ��
Fig. 5 Bond graph model of stand column
1.3 ��ģ
�ƶ��µĽ�ģ�ͷ����Ƕ��嶯��ѧ�����ѷ���������֮һ�����ǵ��͵��ƶ��£�����ϵ��е��Һѹ�������Ŧ���ڹ��̻�еҺѹϵͳ��Ӧ�ù㷺��ͼ6��ʾΪ�ṹԭ��ͼ����Ҫ�ɸ�Ͳ�ͻ�����2������ɣ�ͨ�����˵Ķ��������ڹ����½ӡ�
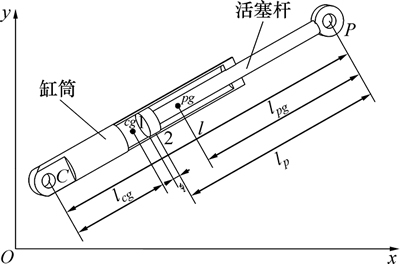
ͼ6 �ṹԭ��
Fig. 6 Schema for cylinder
����ͼ6�м��λ�����ϵ�����˶����ɣ����˵�C��P���ٶȿ����ø�Ͳ������˸�������λ�õ��ٶȼ����ٶȱ�ʾ��
 (7)
(7)
 (8)
(8)
 (9)
(9)
 (10)
(10)
ʽ�У� ��
�� �ֱ�Ϊ��Ͳ�ͻ����˵�ת�ǣ����༸�β��������ͼ6����EC��EP�����������ɵ�
�ֱ�Ϊ��Ͳ�ͻ����˵�ת�ǣ����༸�β��������ͼ6����EC��EP�����������ɵ�
 (11)
(11)
ͼ6�У���Ͳ������ĽӴ���1�ķ����ٶȿɷֱ��ʾΪ��

 (12)
(12)

 (13)
(13)
�����������Ԫ��������Ԫ�������ڽӴ��㴦����������ٶ�vc1-vp1�ı仯���ɣ��ɼ�����Ӵ���1�ķ�����������[9]֤���˸ô��������Ŀ����Ժ���Ч�ԡ��ڸ�Ͳ�ͻ����ϽӴ���2�ķ����ٶȿɷֱ��ʾΪ��

 (14)
(14)

 (15)
(15)
���Ƽ���Ӵ���1�ķ���������ͼ6�ĽӴ���2����һ��Լ����ͬ��ͨ������˶��ٶ�vc2-vp2�����2�ĽӴ��������˶�Լ����ϵʽ(7)~(15)�ɵ�ͼ7��ʾ�����ƶ������ӵ�ƽ���˶������Ͳ�ͻ����˵ļ���ͼģ�ͣ������ԡ�����Ԫ��ȫ�����л��������ϵ��ͼ7�У� ��
�� ��
�� ��
��  ��
�� ��
��  ��
�� ��
��
 ��
�� ��
�� ��
�� ��
�� ��
�� ��
�� ���������˵���Դ��ʾ�µ㴦��Լ��������1��ֱ��ʾ��Ͳ�����������ĵ��˶��ٶȺ��Ӵ��������˶��ٶȡ������������Ԫ��������Ԫ��������1
���������˵���Դ��ʾ�µ㴦��Լ��������1��ֱ��ʾ��Ͳ�����������ĵ��˶��ٶȺ��Ӵ��������˶��ٶȡ������������Ԫ��������Ԫ��������1 �ᴦ������Ӵ�����������Ͳ������˵�����˶��ٶ�ͨ��ģ��Ϊ��7���8��TF�任��֮���0���ʾ��ѹ���ͶԻ�����������FaҲͨ���˽����룻Kb��rb�ֱ�Ϊ������Ͳ�Ӵ���ĵ�Ч�ն�ϵ������Ч����ϵ����rfΪ������Ͳ����˶�������ϵ����
�ᴦ������Ӵ�����������Ͳ������˵�����˶��ٶ�ͨ��ģ��Ϊ��7���8��TF�任��֮���0���ʾ��ѹ���ͶԻ�����������FaҲͨ���˽����룻Kb��rb�ֱ�Ϊ������Ͳ�Ӵ���ĵ�Ч�ն�ϵ������Ч����ϵ����rfΪ������Ͳ����˶�������ϵ����
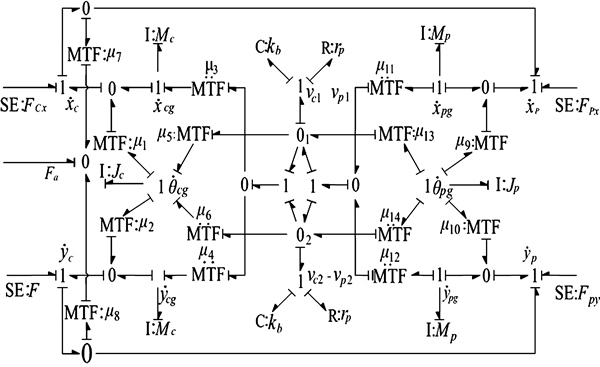
ͼ7 ����ͼģ��
Fig. 7 Bond graph model of cylinder
2 �������Һѹϵͳ��ģ
��������������Һѹϵͳԭ��ͼ��ͼ8��ʾ����һ�����þ�����Y����λ���ܵĵ�Ż���������ṩ�������͵�Ż���֮���������·�ϰ�װƽ�ⷧ�����������ڱ�ֹͣ����ʱ��ʹ�����ɿ���ͣ������λ�ã�������������ʱ���ṩ�㹻�ı�ѹ����ֹ�������������������³����½�����ȫ���������á��ڽ�ģǰ��Һѹϵͳ���б�Ҫ��1) Һѹ�������ԡ�������Ϊ���в������д�����2) ��������������ȶ����������������ԣ�3) ��ŷ�����������Ϊ˲̬���̣�4) ������ת�ٺ㶨���ɴ˽�������ͼ9��ʾ�ı������Һѹϵͳ���������εļ���ͼģ�͡�ͼ9�У�DpΪ������ÿת������Kp1Ϊ�ó��ڵ���Ż�����֮�乤����ǻ�ĵ�ЧҺѹ�նȣ�RlkΪ�õ�й©Һ�裬й©��Ϊ ��RrlΪ����������ʱ��Һ�裬������Ϊ
��RrlΪ����������ʱ��Һ�裬������Ϊ ��Rvi��Rvo�ֱ�Ϊ��Ż��Ľ��͡�����Һ�裬�����������ֱ�Ϊ
��Rvi��Rvo�ֱ�Ϊ��Ż��Ľ��͡�����Һ�裬�����������ֱ�Ϊ ��
�� ��Kp2Ϊ��Ż�����ƽ�֮ⷧ�乤����ǻ�ĵ�ЧҺѹ�նȣ�RcvΪƽ�ⷧ�еĵ���ʱ�ĵ�ЧҺ�裬����������Ϊ
��Kp2Ϊ��Ż�����ƽ�֮ⷧ�乤����ǻ�ĵ�ЧҺѹ�նȣ�RcvΪƽ�ⷧ�еĵ���ʱ�ĵ�ЧҺ�裬����������Ϊ ��RbvΪƽ�ⷧ��˳��ʱ�ĵ�ЧҺ�裬����������Ϊ
��RbvΪƽ�ⷧ��˳��ʱ�ĵ�ЧҺ�裬����������Ϊ ��Kp3Ϊƽ�ⷧ���������ǻ�ĵ�ЧҺѹ�նȣ�ApisΪ��ǻ���������ArodΪ�и�ǻ���������rfΪ��������֮�������˶�����ϵ����Kp4Ϊ���и�ǻ��ƽ�ⷧ�ĵ�ЧҺѹ�նȣ�Kp5Ϊƽ�ⷧ����Ż��ĵ�ЧҺѹ�նȣ�Kp6Ϊ��Ż����������ĵ�ЧҺѹ�նȣ�RfiΪ��������Һ�裬����������ΪVfi���ɴ˼���ͼ���Խ�����������ʱҺѹϵͳ��״̬���̡�
��Kp3Ϊƽ�ⷧ���������ǻ�ĵ�ЧҺѹ�նȣ�ApisΪ��ǻ���������ArodΪ�и�ǻ���������rfΪ��������֮�������˶�����ϵ����Kp4Ϊ���и�ǻ��ƽ�ⷧ�ĵ�ЧҺѹ�նȣ�Kp5Ϊƽ�ⷧ����Ż��ĵ�ЧҺѹ�նȣ�Kp6Ϊ��Ż����������ĵ�ЧҺѹ�նȣ�RfiΪ��������Һ�裬����������ΪVfi���ɴ˼���ͼ���Խ�����������ʱҺѹϵͳ��״̬���̡�
��·1~6�Ĺ�����ǻ��Һ����仯�ʷֱ�Ϊ
 (16)
(16)
 (17)
(17)
 (18)
(18)
 (19)
(19)
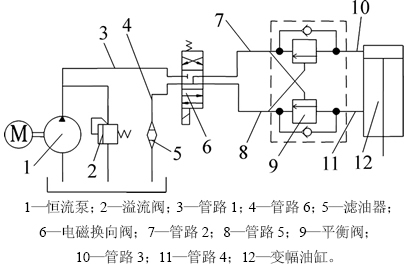
ͼ8 �������Һѹϵͳ
Fig. 8 Hydraulic system of luffing mechanism
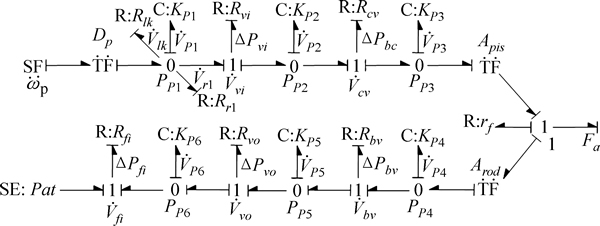
ͼ9 Һѹϵͳ������������ͼģ��
Fig. 9 Bond graph model of hydraulic system during luffing motion
 (20)
(20)
 (21)
(21)
ʽ�У� ��
�� ��
��
 ��
�� ��
�� 
 ��
�� ��
�� ��
��
�ܵ�6�������ϵ�������Ϊ
 (22)
(22)
��·1������ǻ��ѹ��Ϊ

������ǻѹ���ļ������ơ�
3 �����������ͼģ��
���ݹ���������·������ϵͳ�����ԭ��������ǰ�湹����ƽ�����������Ԫ�Ķ��嶯��ѧģ�ͺ�Һѹϵͳ������ģ�ͣ�������ͼ10��ʾ�ı��������Һһ�廯�ļ���ͼģ�͡�������ͨ���µ�������������̶�������˵�������������Ͳ����������Ľµ�A��C�ļ���ͼģ��RC��һ�������ٶ�Ϊ0������RC��һ�˼���1������Դ��ѹ���Ͷ�����������������ͨ��Һѹϵͳ����ͼģ���е�1(i)��ͱ������ͼģ���е�0(Fa)��������·�����ݣ�ͬʱ�������˶���������������ͨ���µ�P��RC�����ݡ��������������е�ת�ٱ仯Ҳͨ���µ�P��RC�����ݸ�����ף�Ȼ�ݵ�Һѹϵͳ��ͨ���˹�����·��ֱ�۵ؽ�ʾ�˱��������Һ��ϵı仯���ɣ�Ҳ��ȷ��ϵͳ�����������б�������ʵ��ӳ�˱���������������䡢���ݡ����ĺʹ���������
4 ����ͷ�����
��ij���������Ϊ�о�������Ҫ�ṹ�����趨���£�r1��r2��r3��r4�ֱ�Ϊ1.050��2.997��3.700��1.400 m������������MLΪ9.500 t��ת������JLΪ27.389 t��m2��ͬʱ��Ϊ��֤�ý�ģ�����Ŀ�������ȷ�ԣ�����ѹ����������װ�ڱ�������Ϳ�λ�ã�ͨ�����ݲɼ����ͼ�����Ա������ǻ��ѹ���вɼ����洢�ͻ�ͼ������ʱ����������ˮƽλ�ã���ʼ��ϵͳ���ͣ���������������ֱλ��ʱ��ֹͣ���͡�
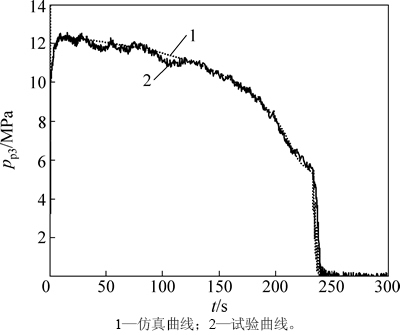
ͼ11��ͼ12��ʾΪ�������������б������ǻѹ����Ӧ������ͷ������ߡ�����ͼ12��ͼ12��֪��
1) ʵ���������������ʱ��ȷ���ʱ��Լ��5 s����������������һ���̶ȵ�ѹ���������������ڱ�����������������·�����������ã��ִ���ƽ�ⷧ��о�������յ���������ǻѹ����������������ѧģ���У��õ��������Ϊһ��ֵ������о����λ���ȶ����Ҹ����������ȡֵ���Ҳ����˶Է��澫�ȵ�ʵ��Ӱ�졣
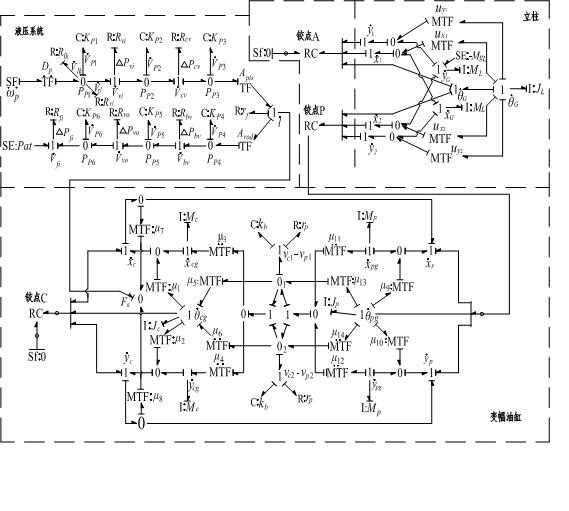
ͼ10 �����������ͼģ��
Fig. 10 Bond graph model of luffing mechanism
ͼ11 ��ǻѹ����������������Ա�
Fig. 11 Comparison between experimental results and simulation results of chamber pressure without rod
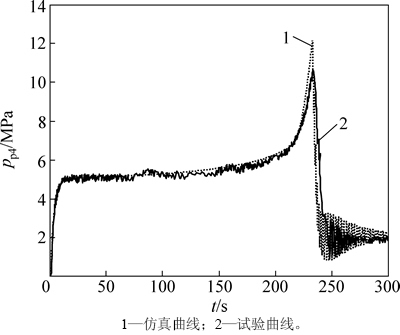
ͼ12 �и�ǻѹ��������������ݶԱ�
Fig. 12 Comparison between experimental results and simulation results of chamber pressure with rod
2) ������ɾ�������˲�䣬�и�ǻѹ���ķ���ֵ��ʵ��ֵԼ��1.2 MPa��������Ϊʵ��ϵͳ�����õĻ���ƽ�ⷧ�������ն�������ʱ�������������û�п��Ǹ����Ķ�����ʱ�����ԣ����Ը�������Ӱ��ʱ��ϵͳ�ij������
3) ���������������ǻѹ������Ϊ0���и�ǻѹ���ȶ���2 MPa���ң���ʵ��ϵͳ���ȶ���Ҫ�ã������ȶ���ʱ��ֻ��30 s���ҡ����ڷ������У�ϵͳ�����ȶ��ij���ʱ��ϳ�����Լ��Ҫ65 s�����ߵ������������ʵ��ϵͳ�е��������ϴ���ǿ��ϵͳ���ȶ��ԡ�
���������ߵĶԱȽ����֪�����ߵij�ʼ����յ�ֵ������ͬ�����ұ仯���Ƽ����ߵĺ����״һ���ԽϺã���֤������ģ�͵�ȷ�ԣ�����������ϵͳ��̬���Խ��з�����Ԥ�⡣����ģ���������Ϳ�ѹ����, ���ø�ģ��, ���Է������ϵͳ�ı�����ٶȡ��ǶȺͽµ�������״̬�����Ķ�̬��Ӧ��
ͼ13��ͼ14��ʾ�ֱ�Ϊ�µ�A��C��Լ��������Ӧ���ߡ�����������ҵ���ʱ���������Ĵ���Ժ�����ǻ�����Һ�ĵ���ЧӦ�������ϳ�ʱ��ؽ��е�Ƶ˥������µ�A��Լ�����ȶ���140 kN���ң��µ�C��Լ�����ȶ���145 kN���ҡ�
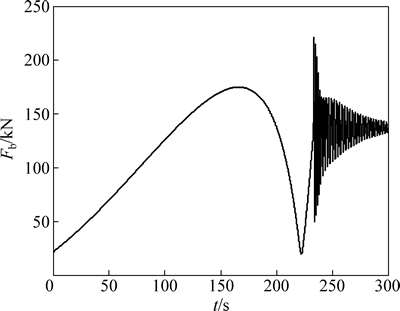
ͼ13 �µ�AԼ������Ӧ
Fig. 13 Cconstraint force response of revolute point A
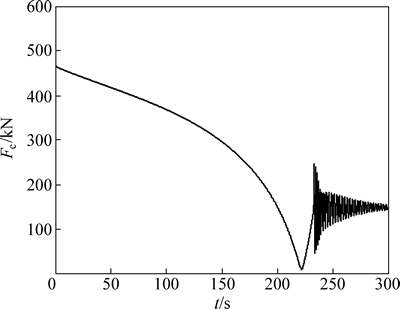
ͼ14 �µ�CԼ������Ӧ
Fig. 14 Constraint force response of revolute point C
5 ����
1) ���ʼ���ͼ����һ�ֶԶ�����ͳһ��ģ�ķ��������ø÷����Ա��������ģʹ�ý�ģ���̹���ģ�黯��ֱ�۵ؽ�ʾ�˸�����֮���Լ����ϵ����Һ������ã��������ǻѹ������ֵģ�����Ϻõط�ӳ��ʵ�ʹ������ԣ�������ģ�Ϳ����ڷ�������߱�������Ķ�̬���ܡ�
2) ת���¡��ƶ��º�����ƽ��������嶯��ѧ��ģ�Ļ�����Ԫ����ͼ�η�ʽ���н�ģ��ʹ�ø���Ԫ���������ϵ���ع�ϵ�������ˣ�ģ���������⣬�ļ��������õ���չ�Ժ�ͨ���ԣ��ڴ˻�����������Ӧ����ģ�ͣ����Կ�ݵ�ʵ��ͬ���ͻ����ļ���ͼ��ģ�ͷ�����
�ο����ף�
[1] ����÷, ���廪, �콨�£����������������Ķ���ѧ��ģ�����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2010, 41(2): 532-538.
KANG Huimei, HE Qinghua, ZHU Jianxin. Dynamic modeling and simulation of mast link frame system of rotary drilling rig[J]. Journal of Central South University (Science and Technology), 2010, 41(2): 532-538.
[2] �. ZY-220�������������֧��ϵͳ��������[D]. ����: ���ִ�ѧ��е��ѧ�빤��ѧԺ, 2007: 1-37.
YANG Hua. Dynamic analysis on tunneling Support system of the ZY-220 rotary drilling rig[D]. Changchun: Jilin University. College of Mechanical Science and Engineering, 2007: 1-37.
[3] ������, ���´�, �༪��, ��. ��ת����ʽ�������ػ��Ķ���ѧ�����뽨ģ[J]. ��е����ѧ��, 2011, 47(20): 34-40.
WANG Pengju, FANG Yongchun, XIANG Jilei, et al. Dynamics analysis and modeling of ship-mounted boom crane[J]. Journal of Mechanical Engineering, 2011, 47(20): 34-40.
[4] ����, ����ƽ, �, ��. ���������Φ������̬���Ե�һ�廯��ģ����[J]. ͬ�ô�ѧѧ��, 2012, 40(5): 729-734.
JIANG Tao, YOU Yiping, YANG Hu, et al. Integrated Model-based analysis of mast mechanism of rotary drilling rig and its dynamic characteristics[J]. Journal of Tongji University, 2012, 40(5): 729-734.
[5] ��ѩ��, ����ȫ. ���ڻ����������������ػ�������������Ż����[J]. ��е����ѧ��, 2005, 41(4): 220-224.
XU Xuesong, HU Jiquan. Hybrid neural networks based portal cranes�� luffing system optimal design[J]. Chinese Journal of Mechanical Engineering, 2005, 41(4): 220-224.
[6] ������, ������, ����ͨ, ��. ƽ�����˻�����������켣�ۺ��Ŵ��˻��Ż��㷨���о�[J]. ��������������ͼ��ѧѧ��, 2001, 13(8): 724-729.
LIN XiaoHui, HUANG Weisheng, LIN Xiaotong, et al. Study of synthetical genetics annealing optimization for the luffing mechanism locus of a plane link[J]. Journal of Computer-Aided Design & Computer Graphics, 2001, 13(8): 724-729.
[7] Flores P. Modeling and simulation of wear in revolute clearance joints in multibody systems[J]. Mechanism and Machine Theory, 2009, 44(6): 1211-1222.
[8] Filippov A. Vibrations of mechanical systems[M]. Yorkshire, England: National Lending Library for Science and Technology, 1971: 137-173.
[9] Bera T K, Samantaray A K. Consistent bond graph modelling of planar multibody systems[J]. World Journal of Modelling and Simulation, 2011, 7(3): 173-188.
[10] Marquis-favre W, Bideaux E, Scavarda S. A planar mechanical library in the AMESim simulation software. part i: Formulation of dynamics equations[J]. Simulation Modelling Practice and Theory, 2006, 14(1): 25-46.
[11] Ahmed S, Lankarani H, Pereira M. Frictional impact analysis in open-loop multibody mechanical systems[J]. Journal of Mechanical Design, Transactions of the ASME, 1999, 121(1): 119-127.
[12] Karnopp D C, Margolis D L, Rosenberg R C. System dynamics: Modeling, simulation, and control of mechatronic systems[M]. New York: John Wiley & Sons, 2012: 326-365.
[13] ������, ���ij�. ���������Φ���������Ӽܵ�����Ԫ����[J]. ���̻�е, 2007, 38(10): 34-36.
HE Xiaoyan, QIN Sicheng. Finite element analysis for the triangular connecting frame of drill mast on rotary pile drill[J]. Construction Machinery and Equipment, 2007, 38(10): 34-36.
[14] ����, ������, ������, ��. �����������װ������Ԫ����[J]. ũҵװ���복������, 2007(2): 24-27.
ZHU Jinguang, CHEN Minge, LIU Anning, et al. Finite element analysis for the working equipment of drilling rigs[J]. Agricultural Equipment & Vehicle Engineering, 2007(2): 24-27.
[15] ���, �ܺ���, ������, ��. ����������۱���ĸ��ط���[C]//2006���й�����е��ҵ���. ��ɳ, 2006: 31-33.
YI Wei, ZHOU Haisheng, ZHAO Liming, et al. Load analysis of hydraulic cylinder of lift-arm of rotary drilling rig[C]//2006 Annua1 Conference of China Pile Machinery Industry. Changsha, 2006: 31-33.
[16] �콨��, л����, ����ΰ, ��. ��ADAMSΪƽ̨��������������������������������[J]. �ִ����칤��, 2009(11): 119-123.
ZHU Jianxin, XIE Songyue, HU Xiongwei, et al. Simulation analysis of the lifting force of parallelogram cylinder of the parallelogram system of rotary drilling rig based on ADAMS[J]. Modern Manufacturing Engineering, 2009(11): 119-123.
[17] ������, ������, ���ı�, ��. �ۼܱ�����������½�ʱ��ƽ�����о�[J]. �Ϸʹ�ҵ��ѧѧ��(��Ȼ��ѧ��), 2013, 36(7): 783-787.
WANG Zipo, HU Junke, YANG Wenbin, et al. Research on the stability of boom luffing mechanism at decline stage[J]. Journal of Hefei University of Technology, 2013, 36(7): 783-787.
[18] ��ͬ��, �½���, �Է�, ��. ȫҺѹת��ϵͳ��Һ���Ϸ��漰����[J]. ���ִ�ѧѧ��(��ѧ��), 2013, 43(3): 607-612.
WANG Tongjian, CHEN Jinshi, ZHAO Feng, et al. Mechanical-hydraulic co-simulation and experiment of full hydraulic steering system[J]. Journal of Jilin University (Engineering and Technology), 2013, 43(3): 607-612.
(�༭ �²ӻ�)
�ո����ڣ�2015-02-10�������ڣ�2015-04-22
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51175518)������ʡ�Ƽ�����С��ҵ�������»���������Ŀ(12C26214305029)(Project (51175518) supported by the National Natural Science Foundation of China; Project (12C26214305029) supported by the Small and Medium-sized Enterprise Technology Innovation Fund of Science and Technology of Hunan Province)
ͨ�����ߣ���ƾ�����ʿ�о���������Һѹ��е������о���E-mail��likejuncsu@126.com
ժҪ��Ϊ�˴��������о������������������ڵĸ��Ӷ�̬���ԣ������Ͼ�ȷ�ı��������ѧģ�͡����ȣ��������������������Ĺ���ԭ���ͽṹ�ص㣬���ü���ͼ���۶�ת���¡�����������ģ�黯��ģ�������������������Ԫ�Ķ��嶯��ѧģ�ͣ�Ȼ�����������Һѹϵͳ�������ļ���ͼģ�͡�ͨ����������ģ�͵Ķ�̬���Լ�����ù��ɣ����ݹ���������·������ͳһ��ʽ�������������Һ��϶���ѧ�ļ���ͼģ�͡��о���������������2ǻѹ������ֵģ���������������Ǻϣ�������ģ����Ԥ���Һ���������ϵͳ�Ķ�̬���ԣ���Ϊ��������߱�������Ķ���ѧ�����ṩ�ο���
[1] ����÷, ���廪, �콨�£����������������Ķ���ѧ��ģ�����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2010, 41(2): 532-538.
[2] �. ZY-220�������������֧��ϵͳ��������[D]. ����: ���ִ�ѧ��е��ѧ�빤��ѧԺ, 2007: 1-37.
[3] ������, ���´�, �༪��, ��. ��ת����ʽ�������ػ��Ķ���ѧ�����뽨ģ[J]. ��е����ѧ��, 2011, 47(20): 34-40.
[4] ����, ����ƽ, �, ��. ���������Φ������̬���Ե�һ�廯��ģ����[J]. ͬ�ô�ѧѧ��, 2012, 40(5): 729-734.
[5] ��ѩ��, ����ȫ. ���ڻ����������������ػ�������������Ż����[J]. ��е����ѧ��, 2005, 41(4): 220-224.
[13] ������, ���ij�. ���������Φ���������Ӽܵ�����Ԫ����[J]. ���̻�е, 2007, 38(10): 34-36.
[14] ����, ������, ������, ��. �����������װ������Ԫ����[J]. ũҵװ���복������, 2007(2): 24-27.
[15] ���, �ܺ���, ������, ��. ����������۱���ĸ��ط���[C]//2006���й�����е��ҵ���. ��ɳ, 2006: 31-33.
[18] ��ͬ��, �½���, �Է�, ��. ȫҺѹת��ϵͳ��Һ���Ϸ��漰����[J]. ���ִ�ѧѧ��(��ѧ��), 2013, 43(3): 607-612.
