
����ģ�����Ƶ��˹�������ģ����
���ʱ��°�ȫԤ���е�Ӧ��
������1�������1���� ΰ2, 3��������1��������1
(1. ���ϴ�ѧ ��ѧ�뻷������ѧԺ������ ��ɳ��410083��
2. ����������ѧ ��ľ�뽻ͨѧԺ���㶫 ���ݣ�510641��
3. �����н�����ѧ�о�Ժ����˾���㶫 ���ݣ�510440)
ժ Ҫ��
ժ Ҫ�������Ż��Ƕȳ���������������ģ������ϵͳ�Ĺ�����ȡ���⣬�����ɿ��Ļ���BP�㷨�Ŀɿ�������ģ����̣���ģ���Ӽ�������ѡȡ��ϵͳ�����ԡ���ȷ��֮��Ĺ�ϵ�������ۡ�Ϊ��ñ��¸��ӹ����µİ�ȫ��������������ģ�����Ƶ��˹���������°�ȫԤ��ģ�ͣ��ɴ���������������ѵ�����о������������������ģ��Ԥ�⾫�Ƚϸߣ���ʵ�����У����µ��¶ȡ���Ħ���ǡ��������Ա��µİ�ȫϵ��Ӱ��ϴ�Ԥ��ģ�Ϳ����ڴ����ձ���ڵIJ�ȷ���ԡ������Ը��ӹ������⣻ͨ��ģ�����Ƶ���ģ�ͣ��ɶԲ�ͬ���̶�����нϾ�ȷ��ģ�������
�ؼ��ʣ�
ģ������ϵͳ����������ģ���Ӽ���Ԥ���������ȶ���
��ͼ����ţ�TP183��TU432 ���ױ�ʶ�룺A ���±�ţ�1672-7207(2009)05-1381-07
Artificial neural network simulation on prediction of
clay slope stability based on fuzzy controller
CHEN Le-qiu1, PENG Zhen-bin1, CHEN Wei2, 3, PENG Wen-xiang1, WU Qi-hong1
(1. School of Geoscience and Environmental Engineering, Central South University, Changsha 410083, China;
2. School of Civil Engineering and Transportation, South China University of Technology, Guangzhou 510641, China;
3. Guangzhou Institute of Building Science Co., Ltd, Guangzhou 510440, China)
Abstract��Based on optimal consideration, the problem of abstracting rule of a fuzzy control system by introducing neural network was solved. A reliable learning procedure for the neural network based on BP algorithm was suggested and the relationship among the number of fuzzy sets and the complexity and accuracy of fuzzy controller was investigated. Furthermore, in order to obtain safety characteristics of slope with complicated working behaviours, the prediction of the slope stability was presented on the foregoing artificial neural network under fuzzy controller, and many samples were collected to carry on the network training. The results show that the prediction models are accurate and easy to operate. The safety factor is affected largely by the parameters of the slope stability such as the slope gradient, rubbing angle inside and coagulate force. Theoretical model can be used to study the uncertainty and nonlinearity in engineering. With the help of fuzzy controlling system which is applicable for model��s adjustment, it is of convenience to simulate the working behavior of diverse cases accurately.
Key words: fuzzy control system; neural network; fuzzy sets; prediction; slope stability
��20����70����������������ض���ṹ���渴�Ӻʹ��ͻ���������ϵͳ�У������Բ����������ڸ�ά�����ϣ�������DZ�����ϵͳ��Ϣ��ģ���ԺͲ�ȷ�����ϡ����ھ�ȷ��ѧģ�͵Ĵ�ͳ�Կ�����������ÿ�������[1]��1965�꣬Zadeah������ģ��������(Fuzzy set theory)[2]����һֱ��20����80���ĩ�����ż���������ķ�չ���ųɹ��ؽ�ģ�����������ڹ�ҵ���ƺ����ѹ�ҵ�������˹����ܵķ�չ�����Ƕ�ģ�����Ƽ��������˴����о�������������[3]���ڷ������Ƶ����˼·������ģ������������ǿ[4]��������Ӧģ��ϵͳ�����˷��涯������������[5]�������Ⱥ�㷨��ģ��С������������������о���Ϊ��ñ��¸��ӹ����µİ�ȫ�������������߽����˻���ģ�����Ƶ��˹���������°�ȫԤ��ģ�͡�
1 ģ������������
ͼ1��ʾΪ��ģ������ϵͳԭ��ʾ��ͼ�����У�ģ������Ļ�ȡ��ȫ��������Ա������ߵľ�����С����ǣ�����ģ������ϵͳ���ܵ���ģ�����ƹ�����ijЩ����£�ģ��������ȫƾ�����ȡ�����ģ�����������������֤���Ż�����ŵĿ������ܡ�������Ϊ����ߵľ����Ƿ�ḻ�������Ƿ��ܹ��Ӳ����ߴ����IJ���������ǡ����ֵ��ܽ���ɳ������ܼ���Ч�Ŀ��ƹ����Ҳ�����Ա�ľ��鱾��Ҳ�������š�Ϊ�ˣ��Ӵ����йؿ��Ʋ����Ĵ����������г�ȡ��Ҫ�ġ�If-then�����ƹ����������˹�������(ANN)��Ϊ����ϵͳ��һ��ģ�⣬����ģ�⡢���䡢���롢�ݴ��Ͳ��д����ȶ������������ڿ�������õ��㷺Ӧ��[6-8]��ģ��������(f-NN)Ϊģ������ij�ȡ�ṩ����Ч;��������ͨ��f-NN�IJ���ģ����̳�ȡģ������ʹģ���������ﵽ���ſ��ơ�
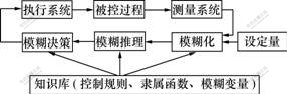
ͼ1 ��ģ������ϵͳԭ��ʾ��ͼ
Fig.1 Theoretical sketch of standard fuzzy controlling system
1.1 ģ����
ģ��������Ա�ʾΪ
1.2 ��������ģ������
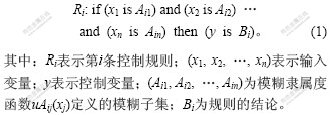
f-NN��ģ�������ƽṹ�μ�ͼ2�����У�5��ģ���Ӽ�NB��NS��ZE��PS��PB�ֱ��������С���㡢��С������5�����ԡ�
ͼ2�У�f-NN�ĵڢ�͢���γ�ģ�����ƹ��ڢ���ʵ�ֽ�ģ�������о��������ϵ���¡�
�Եڢ��ڵ㣺����Ϊxij (i=1, 2; j=1, 2, ��, 5)�����Ϊ��

ͼ2 f-NN�ṹ
Fig.2 Structure of f-NN controlling logic
ÿ�����ƹ����Ӧ2�����������xl��x2��1���������y����Ӧ������ȡ(NB��NS��ZE��PS��PB) 5�����Ա������������ȡ����ת��Ϊwij��wjk��w0i��Ȩֵ���⡣������ͼ2��ʾ�ṹ���ڢ��ȡ�̶������ȼ���{-4��-3��-2��-1��0��1��2��3��4}��
��f-NN���븽��(��1)��ʾģ��������Ϊ��ʦ�źţ�ͨ������ѵ��������wjk��wij��ʹ��������ﵽ������ӳ���ϵ�����Կ�����ͨ������������ֵ�Ĵ������̾�����������������ģ�������Ĺ��̡���������Ϊ��

��1 f-NN����ģ������
Table 1 Input training samples on f-NN simulation
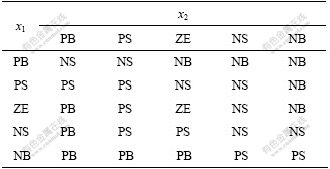
����789��ģ���f-NN��ʵ�����ֵ������ֵ��ľ�����С��0.01����wij��wjk������xl��x2�ij�ʼ�������������������������߷ֱ��ͼ3��ͼ4��
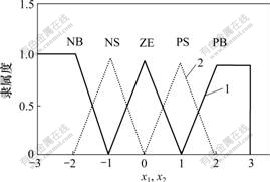
1��x1; 2��x2
ͼ3 xl��x2��ʼ����������
Fig.3 Initial membership function curves on xl and x2
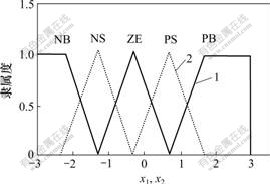
1��x1; 2��x2
ͼ4 x1��x2�������������
Fig.4 Analyzed membership function curves on xl and x2
���ô˷���ͨ�������������¶ȿ���ϵͳ2��ʵ�����з��棬ȡ���������Ч�������ŵ��ǿ����ȶ���������Ӳ����
�����x��y������ѡȡ5��ģ���Ӽ����������Ͻ�������ͬ�����ϣ��ο�ģ���Ӽ�����Խ�࣬Խ�ӽ�����������f-NN[9]���������Ѷ�ҲԽ���ü����ʵ��ʱ�����ڴ�ҲԽ�࣬��ѯʱ��ҲԽ���������Ҫ�����ŵľ�ȷ���븴����֮�����Ȩ�⡣��һ��ȷ��������u��������n�ȷֵIJο�ģ���Ӽ�Ai(i=1, 2, ��, n)��xΪ�������1��Ԫ�أ����Ԫ�ص������仯��ΧΪuAi��U/(2n)��ͬ��������ȷ������Y������m���ο�ģ���Ӽ�Bj(j=1, 2, ��, m)[10]��Ҳ����ȷ֣�yΪ�������ڵ�1��Ԫ�أ���y�������仯��ΧΪMBj��Y/(2m)���辫����ϵͳ����J������Ŀ�꺯���ij̶�����ʾ�����ӳ̶��ɹ�����ϵ��nm����ʾ����
���ģ���Ӽ�����ȷʵ����߾��ȣ������á�[U/(2n)+Y/(2m)]�ĵ���������ȷ�ȵ�һ��������ʽ[��2nm/(mU+nY)]���븴�ӳ̶ȱ�ʾʽnm��ȣ�nm����ʹ���ӳ̶�����Զ������Ծ��ȵ����ӣ����ԣ��о���û������߲ο�ģ���Ӽ������ķ�������߿��Ƶľ��ȡ�
f-N��ģ������ij�ȡ����ת��Ϊ����ֲ�Ȩֵ�Ĺ�ֵ���⣬����������ģ���������ϡ�
2 ģ���������˹�����������ȶ�ģ��Ҫ��
���·����Ĺ���ʵ������б�´ӽ�����λ�Ƶ�ͻȻ������ۻ��Ƶķ����Ը��ӹ��̡���ˣ������ȶ��Եķ�����һ�����ӵ�ϵͳ���̡����ڹ��ɱ��µ��������γ��ڲ�ͬ�ĵ��ʻ����У���������εؿ��˶����ã��ټ��ϵ�Ӧ���Լ�����ˮ�ȵ��ʻ������ص�Ӱ�죬����������Ĺ�����������ѧ���ʱ��ֳ���ۺ����ϵIJ������Ժ߶ȷ����Ե��ص㣬��ˣ����¹��̿��Կ����Dz�ȷ��(ģ�������)�������ԵĶ�̬���Ÿ���ϵͳ��
2.1 �����ȶ���������Ϣ������
�����ȶ���������Ϣ���������µĸ߶ȡ����ء���������Ħ���ǡ�����ǿ�ȡ����½ǡ���϶ѹ���ȣ���ˮλʱ���п�ˮλ�ȡ�������ģ�;���ͨ�����Է����������ԡ��ƻ�ģʽ��������ṹ���͡������������ȣ�����������������������Խ�Ӱ������ȶ��ĸ��ඨ�ԡ�������Ϣ���뵽�����ȶ��ķ��������۹����У��Ա��ۺϷ����������ض�����Ӱ�졣
2.2 �������ضԱ����ȶ��Ե�Ӱ��
����������Ҫ��ָ������ı����������µĸ߶Ⱥͱ��µ��½ǡ��ܵ���˵��������������ͬ������£����µĸ߶������µİ�ȫϵ�����ͣ��෴�����µĸ߶���С����ȫϵ�����ߣ���ʱ���������ȶ���
2.3 ����ѧָ��Ա����ȶ��Ե�Ӱ��
��������ѧָ����Ҫ����������ء���������Ħ���ǡ���϶ѹ���ȡ�һ��أ������������������������Ħ���������µ��ȶ�ϵ��������ȫϵ������֮����������С��Ħ������С�����µİ�ȫϵ����С����������ʧ�ȡ�
2.4 �����ȶ�������
ӭˮ�µ��������Ϊ������ˮ��ˮλ�轵������Ļ���[11]�����ֻ�����Ҫ�ǿ�϶ˮѹ����������ɢ�γ�������������¡���ˣ���ˮλ�轵ʱ�����������ڲ�ˮ�ػ��ϱ�ˮ�ػ��ϵİ�ȫ�Բ
Ϊ�˱������ʱ���������ȶ��ԣ���Ҫ1�������轵�ͻ����ľ���ָ�꣬���߿�ˮλ�½��������������λ�á�Ŀǰ����������Ա�ֵk/(��v)��Ϊ�б������������(���У�k���̷ֱ�Ϊ������ϵ����ˮ�ȣ�vΪ����ˮλ�Ľ���)�����оݿ�������Ϊ�����϶��ˮ�ʵ㽵�����ˮλ���ٵı�ֵ����k/(��v)��0ʱ���������������ڿ�ˮλ�½������м������䣬��ȻΪ�轵����k/(��v)����ʱ���������½��ٶȼ������ˮλ�����ٶ���ͬ����ʱ����ˮλ�����û��������ȫ���⡣��һ������£�ȡk/(��v)��Ϊ��ˮλ�����ٶȵ�ָ�꣬�����б�����ȶ��Ե�Ӱ��̶ȡ�
3 ģ���������˹�����������ȶ�ģ�͵Ľ���
�����Ż�������ͨ���ݶ��½������õ����������Ȩֵ���Ա���ģ������������Ӧ���������ڵ�ʹ�Ż�����Ŀɵ��������ӣ��Ӷ����Եõ�����ȷ�Ľ�[12-14]��
3.1 ѵ����������֯
ѵ����������֯���������缼�����۱����ȶ��Ժ�Ԥ������ȶ�ϵ���Ĺؼ�������ѵ��ǰ������Ҫ�ӱ����ȶ��Է���ʵ����ѡ����д����Եı��²�����Ϊ�����������б�����������Σ����Ǵ�ͳ��������������Լ�����õIJ����ľ��ȵȡ�Ϊ�ˣ��������·�����
a. �ӵ��͵Ĺ���ʵ���Լ�������ѡ����д����Եı��²�����Ϊѵ��������
b. �ʵ�������ͬ���Ե����������Ա���������ͬ���������������������ν�ġ���ģ�����⡱[15]������������ģ���ƹ�Ӧ�á�
c. �����ܶ�ز����������Եı��²������Ծ�����ʵ����ѵ����������
3.2 ѵ�����Ĺ�һ������
BP���������ڵ�������������ͬ�����뽫����������һ�����Է�ֹС��ֵ��Ϣ������ֵ����û�����ǵ�Sigmoid������[0, 0.1]��[0.9, 1.0]���������߱仯��ƽ�����ʺ��ʵĹ�һ��Ӧ���ǽ�������������[0.10, 0.90]�����ڣ����������㲢���ǰ�˵ľ��飬ȡ������0.8��������������һ��Ҫ��
3.3 �����ֵ��ѡ��
�����ֵ��ѡ�������������Ӱ��ܴ��������ѵ��ʱ��Ӱ��Ҳ�Ƚϴ�����ֵ̫����ʹ�ü�Ȩ�����������Sigmoid������ı�����������ʱ������������0���Ӷ�ʹ��Ȩֵ����ֵ?w=0��һ���ʼȨֵ��(-1, 1)֮��������,�����Ƽ�Ȩֵ����Ϊ![]() (���У�SΪ���������Ԫ����rΪ������)������ѡ��ij�ʼֵʹ�����ٶȴ��ӿ졣������Ȩֵ������Ȼ����(-1, 1)֮����������
(���У�SΪ���������Ԫ����rΪ������)������ѡ��ij�ʼֵʹ�����ٶȴ��ӿ졣������Ȩֵ������Ȼ����(-1, 1)֮����������
3.4 �����ڵ�����ȷ��
�����ڵ����������Ҫ�����������Ԫ��������ֱ�ӹ�ϵ����һ��ʮ�ָ��ӵ����⣬��û�кܺ��ʵĽ���ʽ����ʾ�����ڵ���٣���BP���罫��������Ӧ��ӳ���������������������ڵ���࣬��������ṹ�����Ӵ���Ĺ��������ӡ������������ڵ������з����ͱȽϣ�������m������ڵ��BP���磬ȡ(2m+1)�������ڵ��������������ѵ��ʱ��֮��ȡ�ýϺõ����С�
4 ���°�ȫԤ��ģ�͵�ѵ��
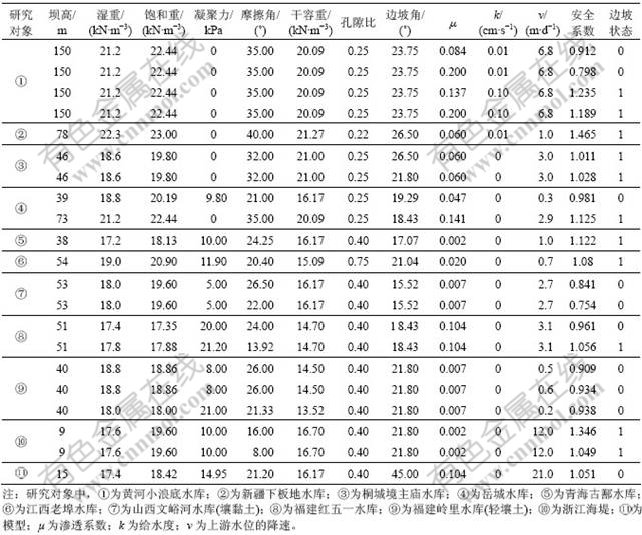
�����ռ����Ĵ���ˮ���ӵ������У���11�����͵��д���������õ�ˮ��[16]��Ϊ�ο�������ѡ��21��������Ϊ��������ģ�������¶�������ģ�ͽ�����Ч��ѵ����ÿһ��ģ��������11�����ײ���ֵ��ɣ�����11��23��2��3��BP����ṹ����ѵ��������������̶�Ȩֵ��ģ����ֵ��ѡȡ�ı��¹���ģ�������йز���ָ�������ǰӸߡ��ض�(�������ݺ�ʪ����)����������Ħ���ǡ����½ǡ����¸߶ȡ���϶ѹ���ȡ�������ϵ��(k)����ˮ��(��)������ˮλ�Ľ���(v)����ȫϵ���Լ�����״̬������ѵ�������������2��ʾ��
��2 ���α����ڿ�ˮλ�����µ��ȶ���ѵ������
Fig.2 Training samples on upstream slope stability under water-level descent
��BP���粻�ϵ�ѵ�������������Ȩֵ����ֵ�����еIJ��������з���ѵ�����������������ѵ��������3��ʾ���ɼ�������BP�������ģ��ѵ����������������ü���ƽ�ⷨ���ý������һ�£������������Ϊ4%��ģ��Ԥ���������ʵ�ʽ�����Ǻϣ�˵��������ģ�ͿɶԱ��½���Ԥ�⣬���ҽϷ��㡣ͬʱ��Ӱ���䰲ȫϵ���������½ǣ���Ħ���Ǻ�������Ҳ�DZȽ���Ҫ��Ӱ�����ء�����ˮ�����������£������Ա����ȶ�Ӱ��Ҳ�ϴ�ˮ�ȡ���ϵ���Լ������ٶ�Ҳ��Ӱ�찲ȫϵ������Ҫ���أ�����DZ��¸߶ȡ�
5 ģ���������˹�����������ȶ�Ԥ��ģ�͵Ĺ���Ӧ��
�Խ���ijˮ��Ϊ����֤ʵ�������ģ���˹���������°�ȫԤ��ģ�͵�Ԥ�����ܡ���ˮ����1958�궯���˽���1960��������ˮ�����ݳ���1��m3�����ԭ���Ϊ�����ǽ�����Ӹ�Ϊ50 m���Ӷ��߳�Ϊ97 m���Ӷ�ȫ��ԼΪ400 m������������3~8 m���ˮɰ��ʯ�㣬����Ϊҳ�Ҽ�ʯӢɰ��ʯ�㣬��ˮ�������������ˮƽ�̸Ǽ���ˮǽ�������˴��Ϊ�������ӡ�1972��11��19����������ǰ������ˮ��ը���������ڣ���ˮλ��ʼ�轵����Ӷ�����(0+241����)�������¡�1972��11��24�ҰӶ�������(0+83����)�������£���1972��11��27�����ҰӶ˵�1�����صĶ������±ڴ��������£��һ����Ͽ죬������в�˴�ӵİ�ȫ���������������Լ148 m���һ������Լ115 m����2��������֮������1�ο�Ϊ25~ 40 m�İ��壬��0+156��������Ȼά���ȶ���
���¼������ʯ��������ѧָ�����4��
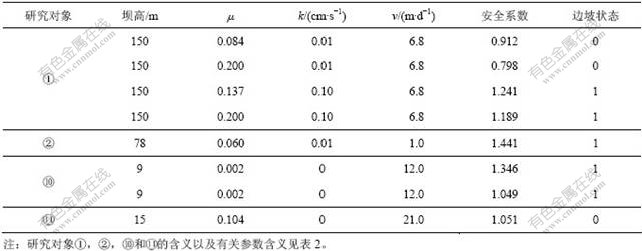
���º��Ͼ�ˮ����ѧ�о�Ժ�������������µı����ȶ�������������Ӷ�(0+241)������а�������߷ֲ��Լ����α��µĻ����ȶ��������㣬����ˮλΪ88.35 m������ð����������ʵ�����Ͻӽ�����ˮλ������69.07 mʱ����������С��ȫϵ��С��1���������û���ʱ�估λ����ʵ����һ�£�����ˮѹ����ȫϵ������Ϊ1.777������4�����ݴ�������Ԥ��ģ�ͣ����ð�ȫϵ��Ϊ0.981�����´��ڲ��ȶ�״̬���ɼ���Ԥ�������ڻ��º��ʵ�ʽ��һ�£�˵�����Ľ����ı����ȶ�Ԥ��ģ�Ͷ����������õı����ȶ����нϺõ�Ԥ�����ܡ�
��3 ģ�ͼ�����
Table 3 Model investigation results
��4 ��ʯ��������ѧָ��
Fig.4 Mechanical parameters of stuffing material

6 �� ��
a. ���ڱ�������������������ϵIJ������Ժ������ԣ�������������ѧ�������ܵ�Ӧ��������ˮ�ȶ������ص�Ӱ�죬���¹��̿��Կ�����һ����ȷ��(ģ�����)�ġ������ԵĶ�̬����ϵͳ����ˣ��ô�ͳ�����Ի���������ȷ���������ָ��ӵķ������������Դ����ӵı����ȶ��Խ���ȷԤ���д���һ�����ѡ�
b. �����緽���ܹ���ֱƽ����⸴�ӵķ����Թ�ϵ�����ܹ�ģ������Ӧ��ȷ����ϵͳ�Ķ�̬�������ص㣬����������ڽ����ȷ���ԡ������Ը��ӵ����⡣
c. ���ݱ��¹����ȶ���ʵ�����������������ȶ��Ե�������ģ�ͣ��Բ��ֱ����ȶ��Խ���Ԥ�⣬Ԥ��������µ�ʵ�ʽ�����Ǻϣ���������������ڶԱ��½���Ԥ�⣬�ҷ��㡢���á�ֻҪ��������Ȩֵ��ģ����ֵ�����ܴﵽ��ѵ�Ԥ��Ч����
d. ������ѵ�������У�Ӱ����°�ȫϵ���������½ǣ������Ħ���Ǻ�������������ˮ�����������£�ˮѹ������ϵ���ͱ��¸߶�Ҳ��Ӱ�찲ȫϵ������Ҫ���ء�
�ο����ף�
[1] ������, �ۻݺ�, ���ӿ�. ����������Ӧ��[M]. �Ϻ�: �Ϻ���ͨ��ѧ������, 1994: 327-386.
HUANG Su-nan, SHAO Hui-he, ZHANG Zhong-jun. Control theory and application[M]. Shanghai: Shanghai Jiaotong University Press, 1994: 327-386.
[2] Zadeh L A. Fuzzy sets[J]. Information and Control, 1965(8): 338-353.
[3] ������, ����. ���������㷨�ĸ߲㽨�������Ե���Ӧ��MR����������������[J]. ������ѧ, 2008, 25(1): 209-216.
XU Xiao-long, SUN Bing-nan. Intelligent algorithm based semi-active control of MR damper of nonlinear seismic response for high-rise buildings[J]. Engineering Mechanics, 2008, 25(1): 209-216.
[4] �� ǿ. MR���ܻ�������ṹ�������ܷ���[J]. ���½�������, 2008, 122(2): 53-55.
LIU Qiang. Seismic response with MR analysis of intelligent base isolated structure damper based on the application of ANFS[J]. Low Temperature Architecture Technology, 2008, 122(2): 53-55.
[5] �� ��. ������Ⱥѧϰ�㷨��ģ��С�����������[J]. ��������, 2008(1): 60-61.
LUO Xu. Fuzzy-wavelet neural network control based on ant-colony optimization[J]. Fujian Computer Technology, 2008(1): 60-61.
[6] Hunt Y, Haas R, Smith R M. Neural networks for control systems: A survey. Automatica[M]. NY: Pergamon Press, 1992: 1083-1112.
[7] Marzuki K, JIANG Zhong-ping, CHEN Ben-mei, et al. IEEE CSM[C]//Decision and Control. Proceedings of 47th IEEE Conference. London: IET CNF, 1992, 12(3): 58.
[8] Nguyen D H, Widraw B. IEEE CSM[C]//Power Delivery. London: IEEE JNL, IEEE Transactions, 1990: 12-18.
[9] �� ƽ, ������, �ܽ���. ����������Ӧ��[M]. �㽭: �㽭��ѧ������, 1995: 2-46.
LI Ping, SUN You-xian, ZHOU Jing-hui. Controlling theory and application[M]. Zhejiang: Zhejiang University Press, 1995: 2-46.
[10] �����, ������, ���ӿ�. ģʽʶ�����˹�����[M]. �Ϻ�: �Ϻ���ͨ��ѧ������, 1994: 3-53.
YANG Huang-pu, XU Xiao-ming, ZHANG Zhong-jun. Model identification and artificial intelligence[M]. Shanghai: Shanghai Jiaotong University Press, 1994: 3-53.
[11] ë����, ���鱦. ������ֵ���������Ӧ��[M]. �Ͼ�: �Ӻ���ѧ������, 1999: 31-97
Mao Chang-xi, Duan Xiang-bao. Seepage numerical calculation and program application[M]. Nanjing: Hohai University Press, 1999: 31-97.
[12] ������. �˹��������ģ�ͼ���Ӧ��[M]. �Ϻ�: ������ѧ������, 1994: 44-102.
Zhang Li-ming. Artificial neural network model and application[M]. Shanghai: Fudan University Press, 1994: 44-102.
[13] ˹����. �������Ի�[M]. ����: ������ѧ������, 1993: 13-76.
SI Hua-ling. Artificial computational technology[M]. Beijing: Peking University Press, 1993: 13-76
[14] ½���. ����������Ľṹ���Ʒ�������[J]. �й���ѧ: A��, 1994, 24(6): 7-14.
LU Jin-gui. Structure approximate analytical theory based on neural network[J]. Science of China: Volume A, 1994, 24(6): 7-14.
[15] �ܼ̳�, ����ɽ, ��Ʈ��, ��. �˹�������-�������������ʵ��[M]. ����: ��ѧ�ռ�������, 1991: 57-121.
Zhou Ji-cheng, Zhou Qing-shan, HAN Piao-yang, et al. Artificial neural network-sixth grade simulation with computer technology[M]. Beijing: Science Popularization Press, 1991: 57-121.
[16] ������, �۳���. ���Ż�������ȷ��������С��ȫϵ�������Ӧ��[J]. ��������ѧ��, 1998, 10(4): 1-13.
Chen Zhu-yu, Shao Chang-ming. Optimization theory on minimal safety factor calculation of slope stability[J]. Chinese Jounal of Geotechnical Engineering, 1998, 10(4): 1-13.
�ո����ڣ�2008-12-17�������ڣ�2009-03-23
������Ŀ��������Ȼ��ѧ����������Ŀ(50878212)
ͨ�����ߣ�������(1981-)���У����������ˣ���ʿ�о���������ʦ����������������ֵģ�⡢����̨��ͬ���õ��о����绰��15918696246��E-mail: csuchenleqiu@yahoo.com.cn
[2] Zadeh L A. Fuzzy sets[J]. Information and Control, 1965(8): 338-353.
Science Popularization Press, 1991: 57-121." target="blank">[15] �ܼ̳�, ����ɽ, ��Ʈ��, ��. �˹�������-�������������ʵ��[M]. ����: ��ѧ�ռ�������, 1991: 57-121.Zhou Ji-cheng, Zhou Qing-shan, HAN Piao-yang, et al. Artificial neural network-sixth grade simulation with computer technology[M]. Beijing: Science Popularization Press, 1991: 57-121.
" target="blank">[16] ������, �۳���. ���Ż�������ȷ��������С��ȫϵ�������Ӧ��[J]. ��������ѧ��, 1998, 10(4): 1-13.Chen Zhu-yu, Shao Chang-ming. Optimization theory on minimal safety factor calculation of slope stability[J]. Chinese Jounal of Geotechnical Engineering, 1998, 10(4): 1-13.
