
DOI: 10.11817/j.issn.1672-7207.2018.08.018
��ʽ���ػ�������Ӧͬ��Э����ƫ����
���¸գ���˼������������
(���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ������ ��ɳ��410083)
ժ Ҫ��
�����߹�����ƫ��������������ƽ���ԺͰ�ȫ���½������⣬���һ�ִ�ͬ��Э����ƫ���Ʒ�����������ʽ���ػ������߹��̵������������������ƫ����ѧģ�ͣ�������ڡ�����Ż���ѧϰ�㷨������������Ӧ���Ʋ��ԣ�����ʽ���ػ��������ٶȽ���Э�����ƣ����ٶȲλ�Ʋ��ƫת�ǽ��п������ߵ������Ӷ�����������ƫ��о���������������ƫ���Ʋ��Ծ������õľ�ƫ����Ч�������ػ���ʵʱ�Ե������ﵽ�����ʽ���ػ�����ƽ���ԺͰ�ȫ�Ե�Ŀ�ġ�
�ؼ��ʣ�
��ʽ���ػ�����ƫ������ѧģ������������ͬ��Э����
��ͼ����ţ�TP273 ���ױ�־�룺A ���±�ţ�1672-7207(2018)08-1971-08
Synchronous coordinated deviation rectification adaptive control for overhead traveling crane
LI Yonggang, LIU Siyu, ZHU Hongqiu, ZHOU Shuqing
(School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: In the running process of overhead traveling crane, crane is easy to deviate from the normal track, which results in the decrease of the stability and safety. A method of synchronous rectification control for crane was proposed. Based on the analysis of forces in walking process of overhead traveling crane, the dynamic model of deviation rectification of overhead traveling crane was established, a neural network adaptive control strategy based on the learning algorithm of error optimization was proposed to coordinated control the speed of the two sides of overhead traveling crane and online adjust the speed difference, the displacement difference and the deflection angle and correct crane deviation. The results show that the good deviation rectification control effect is obtained, the crane can be adjusted in real time, and the stability and safety of the overhead traveling crane are improved.
Key words: overhead traveling crane; deviation rectification; dynamic model; neural network; synchronization and coordination
�ڹ�ҵ�����ֳ�����ʽ���ػ������л����϶��ӣ���������Ϸ��أ������ṹ�����ȶ��ԺͿɿ��Խϲͬʱ����ʽ���ػ���ȴ�ˮƽ�նȵͣ���װ����Ҳ���Ա�֤��������ҵ�����п��ܻ������Ƚϸ��ӵĹ�����Ϊ�ˣ���ʽ���ػ���������ʱ�������ͬ�̶ȵ���ƫ��������ҵЧ�ʵͣ�����ʱ����������ȫ�¹�[1-3]������ʽ���ػ����о�ƫ���ƣ��ɸ�����������ʱ��ƽ���ԺͰ�ȫ�ԣ�����ά���ɱ����������Ч��[4]�������������ǶԾ�ƫ��������˴����о����ڴ�ͳ�����ػ���ƫ�о��У����û�е��ƫ�Ĵ�����������Ҫ�Ǽ�С��������֮���ĥ�𣬵��Ⲣû�г��������ػ�������ƫ����ڸ���ҵ�����������ǶԾ�ƫ����Ҳ�������о���LIU��[5]����ƫ���Ʒ���Ӧ���ڲ�ú����ͷ�ϣ�ͨ���Ľ�PID�㷨��ʵ�֡���ѩ�ֵ�[6]���ˮƽ������켣ƫ��У�����⣬����켣�Զ���ƫ���㷨������λ����ʵ�����Զ���ƫ��SUN��[7]���ڶ��߽ṹ���Ӿ�����̬�����ֹ��ĥ�ij̶ȣ��Դ˼�����˶�ƫ��Ӷ������ƫ��У����������ҫ����[8]Ϊ�˽����ƫ�������ı��ض����ڸ�������״̬�������еĸ��ӷ��������Ⲣͬʱ��߾�ƫ�������ľ�ƫ���ȣ�������Ӧģ�����Ʒ���Ӧ���ھ�ƫ�������У�ͨ��ʵ��֤���˸÷�������Ч�ԡ���Щ�о�������о���ʽ���ػ��ľ�ƫ���ƾ��кܺõĽ�����塣������ʽ���ػ��ľ�ƫ�����о��У������о��߲�������Ӳ���ϴ����ϵͳ��δ�Ծ�ƫ�����˶�������������̽�֣�Ϊ�ˣ���誵�[9]�������ʽ���ػ��ھ�ƫʱλ�þ�ƫ�ͷ����ƫͬʱ���е��ٶȿ��Ʋ��ԣ������Ͽɵõ��ϺõĿ���Ч�����������[10-12]������������Ӧ�ý������о��������ϸ��־�ƫ���Ʋ��Եı����£��������߶���ʽ���ػ�������״̬������������з�����������ʽ���ػ������߾�ƫ����ѧģ�ͣ������ػ��������ٶȺ�λ���Լ�ƫת�ǽ��п��ƣ����øĽ��������������Ӧ����������ͬ��Э����ƫ���ƣ���ʵ����ʽ���ػ���ƽ�Ȱ�ȫ������[13]��
1 ��ʽ���ػ������߾�ƫ����ѧģ��
��ʽ���ػ��������й����е�����ģʽ���䱾����װ���ȵȸ���������ɳ�������ڹ��ƫб���ߣ��Dz�����ƫ����ĸ���ԭ����ˣ������ƫ����ĸ����������ھ�����������ڹ����ƫб[14]����������ʽ���ػ�����ƫʱ�˶�״̬���з������֣�Ҫʹƫ��õ�����������Ӧʹ�����ػ�������λ��һ�£�����ƫ��ƫб��Ϊ0�㡣��ˣ���Ҫ�������ػ���������ٶȣ�ʹ����ƫת�Ӷ�������ƫ������ƫƫת��Ϊ0��ʱ����֤�������ٶȺ�λ�ƾ���ȣ���ʱ�����ػ�ƫ��õ�������
���ȷ�����ʽ���ػ�������״̬[15]��������������ʱ�����˶�ʾ��ͼ��ͼ1(a)��ʾ��������ƫʱ�����˶�ʾ��ͼ��ͼ1(b)��ʾ��
����ʽ���ػ���������ʱ�����������ṩ��������Fl(���������)��Fr(�Ҳ�������)��ȣ�����λ��Xl(���λ��)��Xr(�Ҳ�λ��)��ȣ������ٶ� (����ٶ�)��
(����ٶ�)�� (�Ҳ��ٶ�)��ȣ���ʱ���������������ߣ�ƫб��Ϊ0�㡣����ʽ���ػ���ƫ����ʱ������ʱ���������ṩ��������Fl��Fr��Ȼ��ȣ��������ٶ���Ҳ��Ȼ��ȣ������ڴ�ƫб�Ǧ��Ѳ�����������λ��Xl��Xr������ȡ���Ҫ�����ƫ������ͼ1(b)��ʾ�������ʱӦʹFr��Fl�������������ٶ���
(�Ҳ��ٶ�)��ȣ���ʱ���������������ߣ�ƫб��Ϊ0�㡣����ʽ���ػ���ƫ����ʱ������ʱ���������ṩ��������Fl��Fr��Ȼ��ȣ��������ٶ���Ҳ��Ȼ��ȣ������ڴ�ƫб�Ǧ��Ѳ�����������λ��Xl��Xr������ȡ���Ҫ�����ƫ������ͼ1(b)��ʾ�������ʱӦʹFr��Fl�������������ٶ��� ��ʹ������Xl��Xr��ȣ�ƫб��Ϊ0�㡣
��ʹ������Xl��Xr��ȣ�ƫб��Ϊ0�㡣
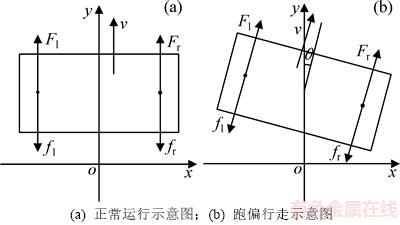
ͼ1 ��ʽ���ػ�������״̬ʾ��ͼ
Fig. 1 Schematic diagrams of operating state of bridge crane
�����Ϸ���������ʽ���ػ����о�ƫʱ���䶯̬���Կ�������Ķ���ѧ����������
��������ƽ��ԭ�������ǵ�����Ħ���������ػ���ƫתת�ص���(�Դ��ڵ���)���������������֮����Ħ������֮��ĺͣ���
 (1)
(1)
���У�IΪ�����ػ������ĵ�ת����������Ϊƫб�Ǽ��ٶȣ�lΪ���ػ����ȵ�һ�룻FrΪ���Ҳ���������FlΪ�������������frΪ�Ҳ�Ħ������flΪ���Ħ������
���������֮���Ħ������Ϊ�̣��Ҷ���֮���Ħ��������ٶȳ����Թ�ϵ����ɵ���������Ħ����Ϊ
 (2)
(2)
���У�Ϊ���Ҳ��ٶȣ� Ϊ������ٶȡ�
Ϊ������ٶȡ�
����ţ�ٶ��ɣ��ɵ�
 (3)
(3)
���У�MΪ���ػ�������mΪ���������� Ϊ���Ҳ���ٶȣ�
Ϊ���Ҳ���ٶȣ� Ϊ�������ٶȡ�
Ϊ�������ٶȡ�
���⣬�������ػ�����ƫʱ���˶�״̬��
 (4)
(4)
��(4)ʽ�������ɵ�
 (5)
(5)
����ʽ(1)~(5)�ɵ�
 (6)
(6)
��(6)ʽ���б任���ɵ�
 (7)
(7)
����״̬���� ����������Ϊ
����������Ϊ ���������Ϊ
���������Ϊ ������(7)ʽ����ʽ���ػ���ƫ�Ķ���ѧ״̬����Ϊ
������(7)ʽ����ʽ���ػ���ƫ�Ķ���ѧ״̬����Ϊ
 (8)
(8)
����
 ��
��
 ��
��
 ��
��
��������֪���ڸ�ģ���У���ͬʱ�������ػ�������ı�������������ΪFl��Fr��Ҫ��֤����������ͦ�ͬʱ�õ����ƣ��������˿��Ƶ��Ѷȣ���ijһ��IJ����仯��Ӱ�쵽��һ�࣬��ˣ���ƫ���ƹ�����ʵʱͬ��Э�����ƹ��̡���������ﵽƽ�⼴����λ�Ʋ�ֵ������Ҫ����ʱ����ƫ��ɡ�
���ͬʱ����ʵ��������ҵ�����У���ģ���еIJ���l��m�ͦ̾��ᷢ���仯����ʹ�ÿ��Ʊ�÷dz����ӡ�lΪ���ػ����ȵ�һ�룬��С�����������˶�ʱ�����ķ����仯����lҲ�ᷢ���仯��mΪ������������һ������£���1����ҵ�����и����������ᷢ���仯������2����ҵ�ĸ��ر仯�Ƚϴ�ʱ��Ҳ��Դ����߲���һ��Ӱ�죻��ΪĦ�������������й�����������һ�£�ʵ���ϣ�����ʽ���ػ������߹����У��ò����ᷢ���仯Ӱ��������·������ˣ�ֻ�п���ģ���и������ı仯������ʹ��ƫ���ƴﵽ���õ�Ч����
2 ����Ӧͬ��Э����ƫ���Ʋ���
2.1 ͬ��Э����ƫ���Ʋ���
��ͳPID���������ڽṹ���������㣬�ڹ��̿����л�ù㷺Ӧ�á�����һЩ������ʱ��ϵͳ��������ͨPID�����������ߵ��ڣ�����Ч����������Ҫ�������ʽ���ػ��������л����Ƚ϶��ӡ��ֳ����űȽ϶�ľ�ƫ���ƣ����ڶ���Ʒ����У����������������ַ����Ի��������õĿ����Ժ�ʵʱ�ԣ��������ƫ����ϵͳ����ƫб�����������Ӧ����ʱ��ƫ����֤���ػ����ܿ��ٻص���������״̬������ƫ�����и����ٴβ���ʱ����������к�ǿ������Ӧ���Ե������������Ʋ����ɽ��������������������õĿ���Ч������ˣ�������������Ʒ�����ǰ����ƫ����ϵͳģ�ͣ��ɽ��о�ƫ��������ơ�
������ο��ٶ�Ϊ ����ʽ���ػ�����ģ�������ɵõ���Ӧ���ٶ������������ػ���������ٶ�����Ϊ
����ʽ���ػ�����ģ�������ɵõ���Ӧ���ٶ������������ػ���������ٶ�����Ϊ ��
�� ��������ƫб�Ǧȣ���������²������κ�ƫб������ƫб��Ϊ0�㡣��ˣ��������ػ���ƫб������Ϊ
��������ƫб�Ǧȣ���������²������κ�ƫб������ƫб��Ϊ0�㡣��ˣ��������ػ���ƫб������Ϊ ��
��
�������Ϸ����Լ�������ƫ����ģ�ͣ��ڸÿ���ϵͳ�������ٶȿ������ͽǶȿ��������ٶȿ��������������ٶ���ȣ��Ƕȿ���������ƫб��Ϊ0�㣬������λ����ȡ�����ϵͳ�ṹ��ͼ��ͼ2��ʾ��
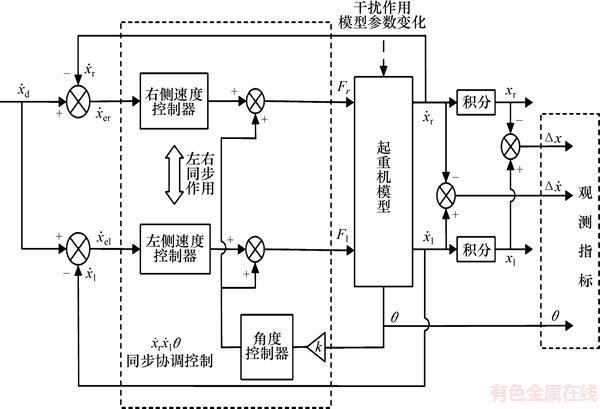
ͼ2 ��ʽ���ػ�ͬ��Э����ƫ����ϵͳ�ṹ��ͼ
Fig. 2 Block diagram of synchronous coordination correction control system bridge crane
2.2 ����Ӧ���������
����������ģ�������п�������ƣ���ԭ����ͼ��ͼ3��ʾ[16]��
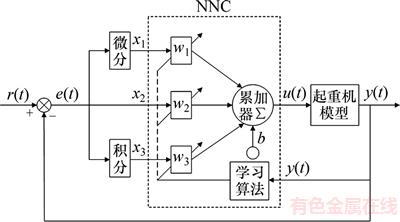
ͼ3 ����ӦPID����ԭ����ͼ
Fig. 3 Principle diagram of adaptive PID control
��ϵͳ����1��������������ģ��[17]����ģ����1������������1���ۼ�����1�����亯����ɣ������������ϵΪ (���У�
(���У� ��Ϊ����������
��Ϊ���������� ��ΪȨֵ����������f[��]Ϊ���亯����aΪ�������)��
��ΪȨֵ����������f[��]Ϊ���亯����aΪ�������)��
����������ϵͳ��ͬ����ϵͳ�ڴ�����ͬʱ���о�ƫ���ƣ���������ʽ���ػ���1�����ض�����ˣ��ٶȿ������ͽǶȿ�����ͬʱ����[18]��������ͬʱ����������������������Э�����Ƶ��Ѷȡ�
������ʽ�е�a�ۼ��������д�ɱ�����ʽ��nΪ�ۼ����������
 (9)
(9)
���������������е�3��������x1��x2��x3�ֱ�Ϊe(k)�� ��
�� (���У�e(k)Ϊ������Ϊ���ı仯�����൱�������֣�Ϊ���仯���ٶȣ��൱�����Ļ���)����ˣ��ڱ���ƫ����ϵͳ�У��������ٶȿ�������������Ϊ�ٶȲ�ٶȲ�仯�����ٶȲ�仯���ٶȣ�������Ƕȿ�������������Ϊƫб�ǡ�ƫб�DZ仯����ƫб�DZ仯���ٶȡ�
(���У�e(k)Ϊ������Ϊ���ı仯�����൱�������֣�Ϊ���仯���ٶȣ��൱�����Ļ���)����ˣ��ڱ���ƫ����ϵͳ�У��������ٶȿ�������������Ϊ�ٶȲ�ٶȲ�仯�����ٶȲ�仯���ٶȣ�������Ƕȿ�������������Ϊƫб�ǡ�ƫб�DZ仯����ƫб�DZ仯���ٶȡ�
���ѷ��֣�ʽ(9)��ʾ�ĵ���Ԫ������������ģ�͵��ۼ������������ʽ��ɢPID����ģ��������ͬ�����롢�����ϵ[19]����ˣ��ɵõ���Ԫ������PID������ģ�����£�
 (10)
(10)
u(k)Ϊ������ģ�͵��������ͬʱҲ�DZ��ض������ػ������������Ӹÿ�����ģ�Ϳ��Կ������Կ�������3��Ȩֵ���ؽ������ߵ������ɸı����������������Ʋ���w1��w2��w3��������Ӧ����ѧϰ���ܣ��Ӷ�ʵ�ֲ�������������
�ڱ���ƫ����ϵͳ�У�������Ϊ�������������������ܽ����������������ֵ�����ƫ������ɡ���ˣ�������������Ӧ�������У�ѧϰ�㷨������Ҫ���˴����õ��ǡ�����Ż����㷨��ͨ��ѭ������������e(k)���õ���Ӧ��ֵ���Ӷ��������ߵ���Ȩֵ����w1��w2��w3�����Ʋ����ĵ������̱�������һ���Ż��������̣�����1�����������ɵ�w1��w2��w3��ά��ռ�����Ѱһ��ɶԵ�ǰĿ��ϵͳʵ����Ч���Ƶ������Ĺ��̡����������Ż����������տɵ�1���������ֵ�����������ػ���������ͬ��Э�����ƣ�ƫ��ɿ���������
ʹ�õġ�����Ż���ѧϰ�㷨����������¡�
��������Ȩֵ���صĸ������������¹�ϵ��
 (11)
(11)
��ɵ�Ȩֵ���صĵ�����Ϊ

 (12)
(12)
���У�hiΪȨֵ���ص���Ӧ���档��3��Ȩֵ����֮��waddΪ
 (13)
(13)
wadd����Ȩֵ���صĵ��������ø�ѧϰ�㷨����������������Ӧ��������������ѧϰ�����ʵ�ѵ������� ���ƽ�y��ʹ��������ȶ���ʵ�����ÿ���Ч����
���ƽ�y��ʹ��������ȶ���ʵ�����ÿ���Ч����
ͨ�����Ϸ�����֪��ʽ���ػ���ƫ������һ��ͬ��Э�����ƹ��̣�����������λ�Ʋ���ʱ����ƫ����������������ͬ��Э�����С�ֻ�е����ػ��������ٶȺ�λ�ƾ�����Լ�ƫת��Ϊ0��ʱ����ƫ����ֹ�������������������ֱ����������ʽ���ػ���ƫ����˼·��ͼ4��ʾ��
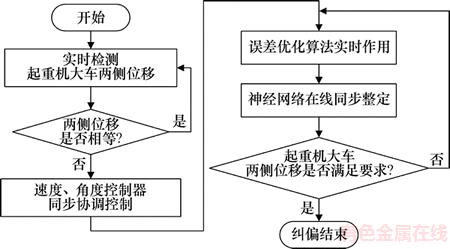
ͼ4 ��ʽ���ػ���ƫ����˼·
Fig. 4 Deviation correction control idea of bridge crane
3 ���漰�������
Ϊ�˲�������ƾ�ƫ�������ľ�ƫ���ܣ���MATLAB SIMULINK�����н��з���ʵ�顣
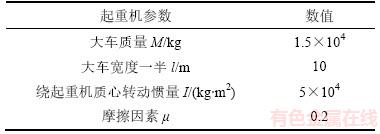
��ʽ���ػ����йس�ʼ�������1��ʾ��
Ϊʹ��������������ֱ�ۣ����������ٶȺ�λ�Ʒֱ����õ��ٶȲ��λ�Ʋ���Ϊ��������
��1 ��ʽ���ػ���ʼ����
Table 1 Bridge crane trolley initial parameters
Ϊ��֤���á�����Ż����㷨�����������Ч�Ժ��Ƚ��ԣ�������BP��������з���Աȣ���������ͨ�������ƫʱ����������ͼ5��ʾ��
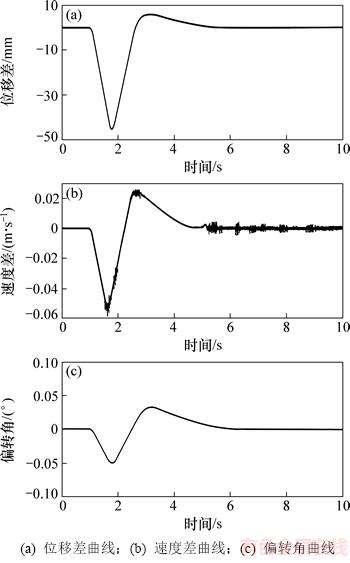
ͼ5 ������������������
Fig. 5 Control curves of basic controller
��ͼ5�ɿ�������������ͨ�������ƫʱ��λ�Ʋ5~6 s�ӽ�0 m�����ٶȲ��в������ٶ��������ȶ���ƫת�Ǧ������������ɼ��������Կ������ĵ�����������λ��
�������øĽ������������п���ʱ���ֱ������ء����غ����ı仯��3�ֹ����½��з��棬�ڵ�1 sʱʩ�Ӹ���ʹ�������ƫ����3�ֹ����µ�λ�Ʋ�������ͼ6��ʾ���ٶȲ�������ͼ7��ʾ��ƫת��������ͼ8��ʾ��
��ͼ6�ɿ����������øĽ��������о�ƫ����ʱ��������Ӧ�ٶȿ죬����ʱ��2~3 s�����ɾ�ƫ������ʱλ�Ʋ�Ҳ�ܿ��������������ķ����仯ʱ���ھ���С��Χ������������4~5 s����������
��ͼ7�ɿ����������øĽ��������о�ƫ����ʱ�����غ�����ʱ��ʽ���ػ��������ٶ�����������С�����ȶ��������ĸı�����ھ����������������ٶ�Ҳ���ȶ����ٶȲ����Ч�����롣
��ͼ8�ɿ����������øĽ��������о�ƫ����ʱ��ƫת�Ǧ������ء�����ʱ���ܿ��������������ı仯ʱ����2 s������Ҳ��������0�㣬�����������á�
���Ͽ�֪�����øĽ�����ʱ���ڲ�ͬ״̬�¾�ƫ����Ч�����ԣ�������Ӧ�ٶȿ죬�ٶȲ��λ�Ʋ������ٶȿ죬ƫת������Ч���á����Ϸ�����֤���˱�������Ŀ��Ʒ�������Ч�Ժ��Ƚ��ԡ�
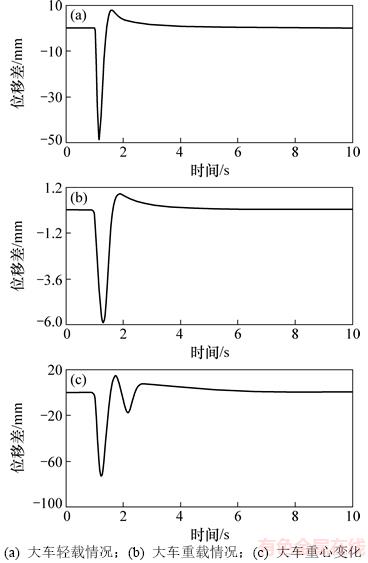
ͼ6 �Ľ�����Ӧ������λ�Ʋ�����
Fig. 6 Displacement curves of improved adaptive controller
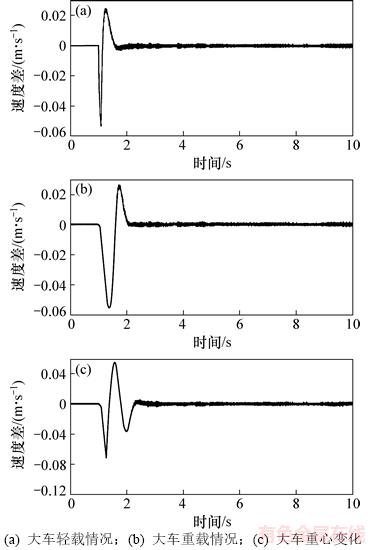
ͼ7 �Ľ�����Ӧ�������ٶȲ�����
Fig. 7 Speed difference curves of improved adaptive controller
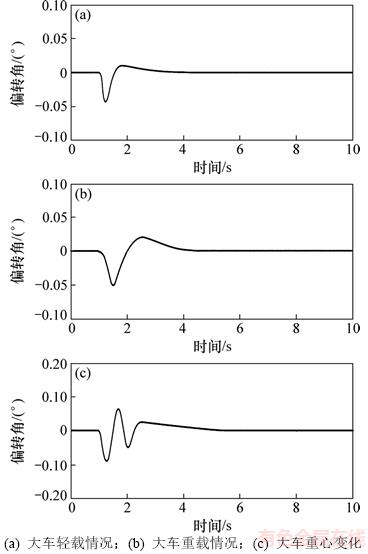
ͼ8 �Ľ�����Ӧ������ƫת������
Fig. 8 Deflection angle curves of improved adaptive controller
4 �ֳ�ϵͳ��Ƽ�Ӧ��
��ͭ���ר����ʽ���ػ�Ϊ��������ֳ��о������Զ�����ϵͳ��ʵ�ֲ�����Ա���Ѻõ�HMIϵͳ�ϸ�����������Ը�������ָ���´��ʽ���ػ�����ָ��ͨ����ҵ��̫����������ͨ�ţ�Э����ϣ���Ч���Զ�������������ѭ��ת����ҵ��
��ϵͳ��Ҫ��Ϊ���֣�ͭ���ר����ʽ���ػ��Զ����п���ϵͳ��ͭ���ר����ʽ���ػ�HMIϵͳ����ͭ���ר���г��Զ����п���ϵͳ��S7-300CPUΪ���ģ�ͨ��Profibus��Profinet�ֳ������Լ���ҵ��̫��ʵ��������Ƶ�Ԫ����վ��I/O��HMIͨ�š�ͭ���ר����ʽ���ػ��Զ�����ϵͳ������ܹ���ͼ9��ʾ��
�����ֳ���ʽ���ػ�������ϵͳ�ṹ���ɽ�һ���õ������߾�ƫ���Ƶ��������˼·��������ʽ���ػ������༤�����ǽ��в�ࣻ��PLC���ƣ��پ��������Ƶ���͵���ֱ�Դ��ֽ��е��٣�����ʹ�ô��������߾�����ȡ���ʽ���ػ���ƫ����ϵͳ�ṹ��ͼ10��ʾ��
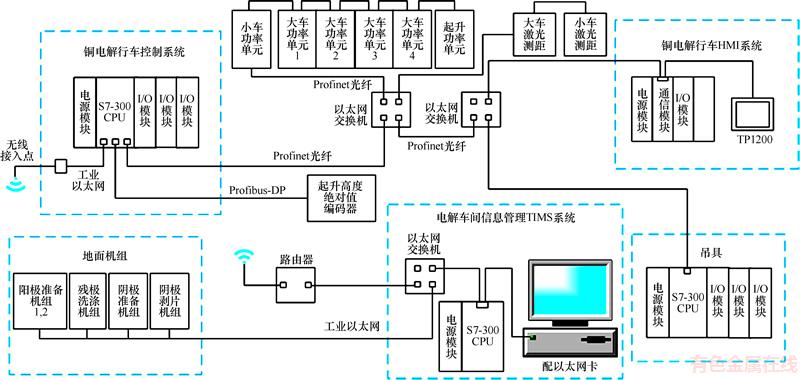
ͼ9 ͭ���ר����ʽ���ػ��Զ�����ϵͳ������ܹ�ͼ
Fig. 9 Overall structure diagram of electrolytic copper special crane��s automatic operation system
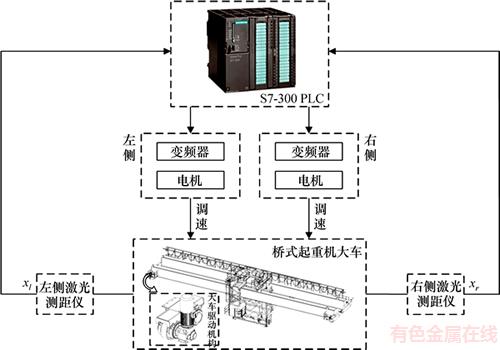
ͼ10 ��ʽ���ػ���ƫ����ϵͳ�ṹ
Fig. 10 System structure of bridge crane deviation correction control system
5 ����
1) �����ʽ���ػ�����ƫ���⣬���������ƫ����ѧģ�ͣ������һ�ֻ��ڡ�����Ż���ѧϰ�㷨������Ӧͬ��Э����ƫ���Ʋ��ԣ�ʹ�������ٶȺ�λ���Լ�ƫת�ǵõ����ٿ��ơ�
2) ��ƫ������Ӧ�ٶȿ죬�ȶ��Ժã������죬��������ƫ�������á��������ֳ�����ʽ���ػ��Զ�����ϵͳ�������ã����и�Ч��
3) ���øþ�ƫ���Ʋ��ԣ���ʽ���ػ�����ƫ����õ���Ч���ƣ����������ʽ���ػ�����ҵЧ�ʣ��ֱ�֤�˴����е�ƽ���ԺͰ�ȫ�ԡ�
�ο����ף�
[1] ��ΰ��, ���˺�. ��ƫ���Ƽ������š���ʽ���ػ��е�Ӧ��[J]. ���������е, 2014(1): 73-74.
XU Weifeng, SONG Xinghai. Application of corrective control technology in bridge and gantry cranes[J]. Hoisting and Transportation Machinery, 2014(1): 73-74.
[2] ����, ������, ������. ������ʽ���ػ��ĵ����Զ���ƫϵͳ[J]. �ع������ؼ���, 2016, 9(2): 23-24.
JING Chao, HUO Lina, LI Xiaoming. Electrical automatic deviation correction system for long-span gantry crane[J]. Heavy Industry & Lifting Technology, 2016, 9(2): 23-24.
[3] ERMIDORO M, COLOGNI A L, FORMENTIN S, et al. Fixed-order gain-scheduling anti-sway control of overhead bridge cranes[J]. Mechatronics, 2016, 39: 237-247.
[4] FATEHI M H, EGHTESAD M, AMJADIFARD R. Modelling and control of an overhead crane system with a flexible cable and large swing angle[J]. Journal of Low Frequency Noise Vibration & Active Control, 2015, 33(4): 395-410.
[5] LIU Ting, DU Yuxing, TONG Minming. Realization of drill rectifying control for coal shearer based on an improved PID algorithm[C]//IEEE International Conference on Mechatronics and Automation. Harbin, China, 2016: 32-36.
[6] ��ѩ��, Ҷ��, ����, ��. ˮƽ������Ĺ켣�Զ���ƫ����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2013, 44(1): 297-300.
GAO Xuelin, YE Hua, REN Zhengzheng, et al. Automatic deviation correction method for horizontal directional drilling[J]. Journal of Central South University (Science and Technology), 2013, 44(1): 297-300.
[7] SUN Jinghua, LIU Zhen, ZHAO Yuntao. Motion deviation rectifying method of dynamically measuring rail wear based on multi-line structured-light vision[J]. Optics & Laser Technology, 2013, 50(2): 25-32.
[8] ��ҫ��, ����, ����, ��. ����Ӧģ�������ھ�ƫ�������е�Ӧ��[J]. ���ƹ���, 2013, 20(2): 313-316, 323.
XU Yaoliang, ZHAO Wanjian, WANG Bo, et al. Application of adaptive fuzzy control in deviation correction controller[J]. Control Engineering, 2013, 20(2): 313-316, 323.
[9] ���, ���˸�. ��ʽ���ػ���ƫ���Ʋ��Ե��о�[J]. �¼����¹���, 2010(10): 27-29.
LIU Jin, LI Xinggen. Research on the corrective control strategy of bridge crane[J]. New Technology & New Process, 2010(10): 27-29.
[10] ������, ����. ����ȷ��ѧϰ�Ļ���������ռ�����Ӧ���������[J]. �Զ���ѧ��, 2013, 39(6): 806-815.
WU Yuxiang, WANG Cong. Self-adaptive neural network control for robot tasks based on deterministic learning[J]. Automation Journal, 2013, 39(6): 806-815.
[11] �ֺ���, ������, ��ѩ, ��. �����������ˮ�»�������ά�������ٿ���[J]. ����������Ӧ��, 2012, 29(7): 56-62.
JIA Heming, ZHANG Lijun, QI Xue, et al. Three-dimensional track tracking control of underwater robot based on neural network[J]. Control Theory & Applications, 2012, 29(7): 56-62.
[12] SMOCZEK J. Fuzzy crane control with sensorless payload deflection feedback for vibration reduction[J]. Mechanical Systems & Signal Processing, 2014, 46(1): 70-81.
[13] ������, ������, ������, ��. ���̿����е����ܼ��ɽ�ģ����[J]. ϵͳ����ѧ��, 2001, 13(Z1): 8-11.
CHEN Xiaofang, GUI Weihua, CAI Zixing, et al. Intelligent integrated modeling method in process control[J]. Journal of System Simulation, 2001, 13(Z1): 8-11.
[14] ������, �����, ���, ��. ���ڶ���ѧģ�͵���ʽ�ƶ������˵������[J]. ������, 2008, 30(4): 326-332.
CHEN Xiaopeng, LI Chengrong, LI Gongyan, et al. The motor control of wheeled mobile robot based on dynamic model[J]. Robot, 2008, 30(4): 326-332.
[15] ����. �Զ���������ػ�ƫб���߲���������[J]. ���������е, 2016(3): 55-57.
LEI Jinsheng. Analysis of lateral forces in skew walking of automatic rail cranes[J]. Hoisting and Transportation Machinery, 2016(3): 55-57.
[16] SHU Huailin, HU Jintian. Study on multivariable system based on PID neural network control[J]. Advanced Materials Research, 2012(12): 591-593.
[17] ����ǫ, ������. BP��������PID���������������е�Ӧ��[J]. ���������, 2010, 27(10): 171-174.
CHEN Shuqian, ZHANG Lihong. Application of BP neural network in PID controller parameter tuning[J]. Computer Simulation, 2010, 27(10): 171-174.
[18] MA Bojun, FANG Yongchun, WANG Yutao. Adaptive control for an underactuated overhead crane system[J]. Control Theory and Applications, 2008, 25(6): 1105-1109.
[19] ������, ������, ������, ��. �������и��������缰���ڹ�������е�Ӧ��[J]. ���������, 2010, 25(7): 1074-1078.
TANG Mingzhu, YANG Chunhua, GUI Weihua, et al. Cost-sensitive probabilistic neural network and its application in fault diagnosis[J]. Control and Decision, 2010, 25(7): 1074-1078.
(�༭ �²ӻ�)
�ո����ڣ�2017-10-12�������ڣ�2017-12-22
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(61673400);������Ȼ��ѧ�������о�Ⱥ����Ŀ(61621062)������ʡս�������˲�ҵ�Ƽ���������Ŀ(2016GK4023)(Project(61673400) supported by the National Natural Science Foundation of China; Project(61621062) supported by the Foundation for Innovation Research Groups of the National Natural Science Foundation of China; Project(2016GK4023) supported by the Strategic Emerging Industry Technology Research Foundation of Hunan Province)
ͨ�����ߣ����¸գ���ʿ�����ڣ����¸��ӹ��̽�ģ���Ż������о���E-mail��liyonggang@mail.csu.edu.cn
ժҪ�������ʽ���ػ������߹�����ƫ��������������ƽ���ԺͰ�ȫ���½������⣬���һ�ִ�ͬ��Э����ƫ���Ʒ�����������ʽ���ػ������߹��̵������������������ƫ����ѧģ�ͣ�������ڡ�����Ż���ѧϰ�㷨������������Ӧ���Ʋ��ԣ�����ʽ���ػ��������ٶȽ���Э�����ƣ����ٶȲλ�Ʋ��ƫת�ǽ��п������ߵ������Ӷ�����������ƫ��о���������������ƫ���Ʋ��Ծ������õľ�ƫ����Ч�������ػ���ʵʱ�Ե������ﵽ�����ʽ���ػ�����ƽ���ԺͰ�ȫ�Ե�Ŀ�ġ�
[1] ��ΰ��, ���˺�. ��ƫ���Ƽ������š���ʽ���ػ��е�Ӧ��[J]. ���������е, 2014(1): 73-74.
[2] ����, ������, ������. ������ʽ���ػ��ĵ����Զ���ƫϵͳ[J]. �ع������ؼ���, 2016, 9(2): 23-24.
[6] ��ѩ��, Ҷ��, ����, ��. ˮƽ������Ĺ켣�Զ���ƫ����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2013, 44(1): 297-300.
[8] ��ҫ��, ����, ����, ��. ����Ӧģ�������ھ�ƫ�������е�Ӧ��[J]. ���ƹ���, 2013, 20(2): 313-316, 323.
[9] ���, ���˸�. ��ʽ���ػ���ƫ���Ʋ��Ե��о�[J]. �¼����¹���, 2010(10): 27-29.
[10] ������, ����. ����ȷ��ѧϰ�Ļ���������ռ�����Ӧ���������[J]. �Զ���ѧ��, 2013, 39(6): 806-815.
[13] ������, ������, ������, ��. ���̿����е����ܼ��ɽ�ģ����[J]. ϵͳ����ѧ��, 2001, 13(Z1): 8-11.
[14] ������, �����, ���, ��. ���ڶ���ѧģ�͵���ʽ�ƶ������˵������[J]. ������, 2008, 30(4): 326-332.
[15] ����. �Զ���������ػ�ƫб���߲���������[J]. ���������е, 2016(3): 55-57.
[17] ����ǫ, ������. BP��������PID���������������е�Ӧ��[J]. ���������, 2010, 27(10): 171-174.
