
ˮ���Ĵ�ʽ�ɿ���ҵ�����µ�
����ѧ������·�����ٿ���
������1, 2 , ���پ�1, 2 , ���1, 2 , ��С��1, 2
(1. ���ϴ�ѧ ���繤��ѧԺ������ ��ɳ��410083��
2. �㽭��ѧ ���嶯�������ϵͳ�����ص�ʵ���ң��㽭 ���ݣ�310027)
ժ Ҫ��
�������Ĵ�ʽ�ɿ�ֱ�м�ת�����߹��̽��ж���ѧ�����������Ĵ���������λ�������ǿ��֮��Ĺ�ϵ�������ˮ���Ĵ�ʽ�ɿ����ߵļ���λ��Ҫ��ͬʱ���ڿ���������������ѹʵ������ˮ����������������ҵ����£����Ĵ�ʽ�ɿ����˶���ѧ�������˶�ѧ��ģ��ͨ�����棬�õ����Ĵ�ʽ�ɿ�ֱ�м�ת������������Ĵ���ƽ������λ�ơ�ͨ��PD���ƣ��ڱ�֤�Ĵ���·�����ٵ�����£�������λ�ƿ�����Ҫ��ķ�Χ֮�ڣ���֤��ˮ���Ĵ�ʽ�ɿ����߹����еĶ���Ҫ��Ϊ����Ĵ���·���滮�ṩ�����ۻ�����
�ؼ��ʣ�
ˮ���Ĵ�ʽ�ɿ�������·��������PD������
��ͼ����ţ�TP242 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S2-0307-06
Dynamic analysis and path tracking control of tracked underwater miner in working condition
HAN Qing-jue1, 2, LIU Shao-jun1, 2, DAI Yu1, 2, HU Xiao-zhou1, 2
(1. College of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China;
2. State Key Laboratory of Fluid Power Transmission and Control, Zhejiang University, Hangzhou 310027, China)
Abstract: Dynamic analysis of underwater tracked miner in working condition was done during both straight driving and steering. First, based on the relationship between maximum shear displacement and shear stress, required shear displacement during working of the tracked miner is obtained. Considering the bulldozing resistance, compaction resistance, water resistance and force flexible hose, the dynamic and kinetic model of tracked underwater miner is established. By simulation, the shear displacement of both left and right track of the miner is obtained. By PD control strategy, the tracked underwater miner can move along the desired path, and the shear displacement of both left and right track is successfully controlled and therefore the miner can get higher tractive force. This work offers a theoretical base for further research.
Key words: tracked underwater miner; slip; path tracking; PD control
�������·�滷���£��Ĵ�ʽ��������������������Ľṹ�ص㾭����Ӧ���ھ��¡�ũҵ�Լ��ɿ�����[1]���Ĵ�ʽ���������нϴ���Ĵ��ӵ�������ص㣬����ʹ���ڸ��ӵ�·�����ṩ�����ǣ�����������6 km���������˼��ܽ�Dzɿ���ԣ������¹���ӡ�ȡ��������й����ڶ���ң���������Ƴ��˺����Ĵ�ʽ�ɿ�ϵͳ�������ں�����ҵ����µ��Ĵ�ʽ�ɿ��ԣ�����������Ĺ����������ɿĶ���ѧ�����DZ�Ҫ�ġ����ȣ��ɿ������������ϡ���Ļ����£��ɿ�ǣ������ͨ���Ĵ���Ե���Ĵ����ļ��������ṩ����Σ��ɿ��ں��ײɿ�����У��ر�����ת������л��ܵ����׳����������ѹʵ���������������������ܵ�������������������ˮ������ͬʱ����ɿ���������������Ҳ���ڲɿ�ת��Ĺ����ж������һ�����谭���á���Щ��Ӧ����ˮ���Ĵ�ʽ�ɿĶ���ѧ�����м��Կ��ǡ�
ͬʱ��Ϊ�˱�֤�ɿ���ˮ��˳�����ߣ��Ĵ��Ĵ���Ҫ������һ���ķ�Χ�ڡ�Ϊ��ʹ�Ĵ����������Ҫ���ǰ�������Ź滮·����ҵ��Ӧ�öԲɿ����ʵ����ơ�
Bekker[2]�������·������ʽ������ѹǿ�ͼ�������֮��Ĺ�ϵ��Wong[3-4]������ڿ���·����Ĵ�������������Ĵ�ѹ���ֲ������۷���������Ahmadi��[5]���Ĵ��������˶���ѧ��ģ�������·���滮������Schiller������Ĵ���·�������㷨[1]�����ǣ���Щ�о�����������½�ر��档Yeu��[6]������ǿ��PD���ƶ����ں���ϡ�������µIJɿ�����·�����ٷ��棬��Ч�ؿ����˲ɿļ���λ�ƣ���û�п���ѹʵ������ˮ������Ӱ�졣Kim��[7]�������ڲ�ͬ�����ٶ�����Ӱ��������Euler�������Բɿ����˶���ѧ���������Ƕ��ڲɿ�ת������е�������λ��δ����ϸ���ۣ�ͬʱҲû�н����������������������ڡ����[8]����ʵ�ʹ����������Ĵ�ʽ�ɿ����˶���ѧ��ģ�������������Ҳδ�ܸ���ת��������Ĵ�����λ�ƵĽ����
Ϊ���о���ʵ����ҵ�������ڶ�����ض����Ĵ�ʽ�ɿ��������ܵ�Ӱ�죬ͬʱ��Ч�ؿ��Ƽ���λ�Ƽ���ǰ����ʹ�ɿ����ع滮�õ�·�����ߣ����������ڲɿ�ֱ�м�ת������½�ѹʵ����������������ˮ���������ܵ����ÿ������ڣ��Բɿ������ܽ����˷��������ͬʱΪ�˱�֤�ɿ�����Ч�ظ��ٹ滮�õ�·��������˼�PD���ơ�ͨ�����棬�õ��˱ȽϺõĿ���Ч����
1 ������ѧ����
����������������ֱѹ���ͼ���Ӧ������ֱѹ�������ڳ���ײ���ѹ������������ͨ��ѹǿ�ͳ������Ĺ�ϵ�õ�������Ӧ�����ṩ�������������ƶ���������������ͨ������λ���������֮��Ĺ�ϵ�õ���
���ھ���������Bekker��������¹�ʽ��ʾѹ��-���ݹ�ϵ��
![]() (1)
(1)
ʽ�У�PΪ����Ӧ����kcΪ�ھ۱���ģ����![]() ΪĦ������ģ����bΪ���а���ȣ�zΪ��������nΪ����ָ���������ҹ�����ģ�⺣�����ԣ�ѹ��-����ģ�Ͳ������1��ʾ��
ΪĦ������ģ����bΪ���а���ȣ�zΪ��������nΪ����ָ���������ҹ�����ģ�⺣�����ԣ�ѹ��-����ģ�Ͳ������1��ʾ��
��1 ѹ��-����ģ�Ͳ���
Table 1 Parameters of sinkage-pressure model

����Bekker���ۣ�����λ���������֮��Ĺ�ϵ����ͨ��ʽ(2)�õ���
![]() (2)
(2)
���У�![]() ������ʽ(3)�õ���
������ʽ(3)�õ���
![]() (3)
(3)
ʽ�У�![]() Ϊ����������EΪ�������������������ı�ֵ��CΪ����ǿ�ȣ�CDΪ����������
Ϊ����������EΪ�������������������ı�ֵ��CΪ����ǿ�ȣ�CDΪ����������![]() Ϊ������Ħ���ǣ�kwΪ����������Ӧ�ļ���λ�ơ�����λ�������Ӧ��ģ�Ͳ������2��ʾ��
Ϊ������Ħ���ǣ�kwΪ����������Ӧ�ļ���λ�ơ�����λ�������Ӧ��ģ�Ͳ������2��ʾ��
��2 ����λ�������Ӧ��ģ�Ͳ���
Table 2 Parameters of shear stress and shear displacement model
![]()
��ʽ(1)~(3)���Եõ����ں��������Եļ���λ���������֮��Ĺ�ϵ����ͼ1��ʾ��
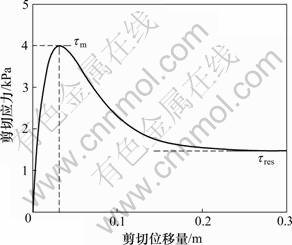
ͼ1 ����λ����������Ĺ�ϵ
Fig.1 Relationship between shear stress and shear displacement
����ͼ1�����ǿ��Եõ�����Ժ���ϡ�����������ʺϲɿ����ߵļ���λ��Ӧ�ÿ�����kw (0.035 m)������
2 ����ѧģ��
�����Ĵ�ʽ�ɿ���ҵ���Ķ���ѧģ����ͼ2��ʾ��
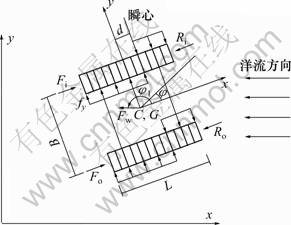
ͼ2 �ɿ���ģ��ʾ��ͼ
Fig.2 Dynamic model of miner
![]() (4)
(4)
![]() (5)
(5)
![]() (6)
(6)
���У�Fi��Fo�ֱ�Ϊ������Ĵ���ǣ������Ri��Ro�ֱ�Ϊ������Ĵ����ܵ�������������ѹʵ����������������FwΪˮ������fyΪ������ÿ���Ĵ��ϵĺ���������dΪ�ɿ���ת˲��������֮��ľ��룻MΪ�ɿ�������IΪ�ɿ�ת��������BΪ�ɿ������Ĵ�������֮��ľ��룻LΪ���峤�ȣ�![]() Ϊx��������������ˮ����֮��ļнǣ���ΧΪ0��~180�㣬���ĵ��о�����
Ϊx��������������ˮ����֮��ļнǣ���ΧΪ0��~180�㣬���ĵ��о�����![]() Ϊ45��ʱ���С�
Ϊ45��ʱ���С�
3 ��ҵ�����µ�������
3.1 ǣ����
�Ĵ���ǣ�������Ĵ���֮��Ĺ�ϵ������ʽ�õ�[3]��
![]() (7)
(7)
ʽ�У�FmaxΪ���ǣ������![]() Ϊ�������Բ�����iΪ�Ĵ����ʡ�
Ϊ�������Բ�����iΪ�Ĵ����ʡ�
3.2 ѹʵ����
�Ĵ�ʽ�ɿ���ʻ�ں���ϡ���������ϣ����ݽϴ��ɱ���ؽ������ϴ��ѹʵ����������������ѹʵ�����������й�ʽ�õ�[9]��
 (8)
(8)
���У�mΪ����������hΪ�����Ĵ�֧��������bΪ�Ĵ����ȣ�pΪ�Ĵ���ھࣻdΪ֧����ֱ��������������3��ʾ��
��3 ѹʵ������ʽ�������
Table 3 Parameters of compaction forces

3.3 ��������
�������������ɵõ���ʽ[10]��
![]() (9)
(9)
���У�![]() Ϊ�������ܶȣ�Kc��
Ϊ�������ܶȣ�Kc��![]() Ϊ������ϵ����������ʽ�õ���
Ϊ������ϵ����������ʽ�õ���
![]() (10)
(10)
![]() (11)
(11)
���Nc��![]() Ϊ��������ϵ��[11]����������Ħ����ȷ��������������4��ʾ��
Ϊ��������ϵ��[11]����������Ħ����ȷ��������������4��ʾ��
��4 ����������ʽ�������
Table 4 Parameters of bulldozing force

3.4 ˮ����
ˮ���Ĵ�ʽ�ɿ��нϴ�������ӭˮ��������Һ�ˮ�ܶȽϴ��״�����һ�����������Բɿ���һ���Ķ���Ӱ�졣ˮ����������ˮ�������������Ե��Ӷ���[12]��
![]()
![]() (12)
(12)
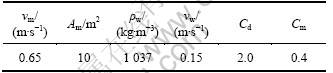
���У�CdΪˮ����ϵ��(drag co-efficiency)��CmΪ��������ϵ����![]() Ϊ��ˮ�ܶȣ�AmΪ�ɿ�ӭˮ�����vm��vw�ֱ�Ϊ�ɿ���ʻ�ٶ��뺣���ٶȡ�ˮ������ʽ����������5��ʾ��
Ϊ��ˮ�ܶȣ�AmΪ�ɿ�ӭˮ�����vm��vw�ֱ�Ϊ�ɿ���ʻ�ٶ��뺣���ٶȡ�ˮ������ʽ����������5��ʾ��
��5 ˮ������ʽ�������
Table 5 Parameters of hydrodynamic force
3.5 ������
�����й���������������Բɿ�ϵͳ�IJ���������������ԼΪ40 kN��������Ϊ��ֱ���ϡ�
4 ������
����ʵ�ʲɿ�S��Ԥ��·������������ֱ�й��̣�����ת����̡�������̵�����·����ͼ3��ʾ������·���������6��ʾ��
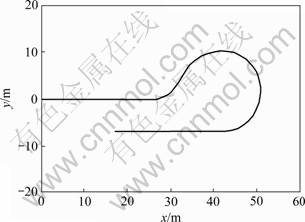
ͼ3 ����ɿ�·��ʾ��ͼ
Fig.3 Desired mining path
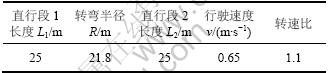
��6 ����·������
Table 6 Parameters of desired path
���ݸ������ļ��㹫ʽ(7)~(12)�����ǵõ�����·���²ɿ����߹����������Ĵ���������λ�ƣ���ͼ4��ʾ��
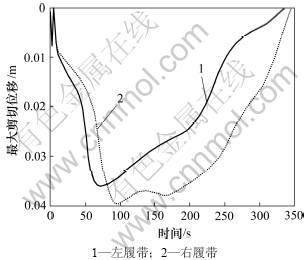
ͼ4 �����ֵ�������λ��
Fig.4 Maximum shear displacement of both track
��ͼ4���Կ������ڲ����κο��Ʋ��Ե�����£������Ĵ���������λ���Ѿ��ӽ����߳���kw������ڲɿ��������ܻ�����ܲ�����Ӱ�죬��ˣ�Ӧ������ʵ��Ŀ��Ʋ��ԶԲɿ���·�����ټ�������λ�ƽ��п��ơ�
5 PD���Ʋ���
5.1 �ɿ��˶�ģ�ͼ������㷨
�ɿ��˶�ģ����ͼ5��ʾ��
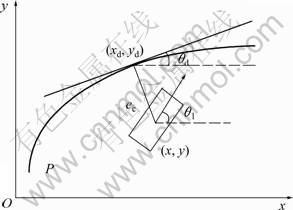
ͼ5 �ɿ��˶�ģ��
Fig.5 Kinetic model of miner
ͼ5�У�elΪ·��ƫ�![]() Ϊ��λ��ƫ�
Ϊ��λ��ƫ�
![]() (13)
(13)
![]() (14)
(14)
PD���Ʋ������£�
![]() (15)
(15)
![]() (16)
(16)
���У�wl��wr�ֱ�Ϊ�����ֵĽ��ٶȣ�k1-4Ϊ·��ƫ���Լ���λƫ�����档����ֱ�жΣ���������ȡֵ���£�k1=14.6, k2=0.07, k3=6.4, k4=0.03��
����ת����̣���������ȡֵ���£�k1=3.64, k2=0.07, k3=3.75, k4=0.22��
5.2 ������
ͼ6~7��ʾ�ֱ�Ϊδ�ӿ��Ƽ���PD�㷨���ƺ�ķ�������
ͨ�����棬���Կ�����δ�ӿ��Ʋ���ʱ���ɿ�ʵ������·����Ԥ��·��ƫ��ϴ�����Ӱ��ɿ�Ч����ͬʱ�������Ĵ��ļ���λ�ƾ��ӽ�kw���ھ���PD���ƺɿ��ܺܺõذ���Ԥ��·�����ߣ����������Ĵ��ļ���λ���ܿ����ں�С�ķ�Χ�ڣ������˲ɿ��������ܵ�Ҫ��
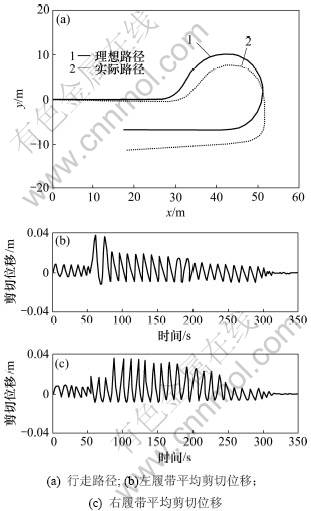
ͼ6 δ�ӿ���·�����ٽ��
Fig.6 Simulation result without control
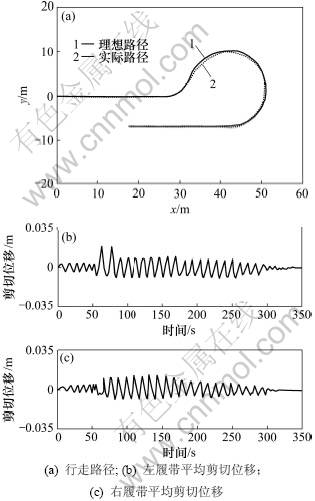
ͼ7 PD���ƺ��·�����ٽ��
Fig.7 Simulation result with PD control strategy
6 ����
(1) ��Ժ����Ĵ�ʽ�ɿ�ʵ�ʵĹ����������Բɿ��ܵ��ĸ�Ӱ�������������۷��������㣬���������ɿ������ʻ���ܵļ���λ��kw��
(2) �Բɿ����˶���ѧ�Լ��˶�ѧ��ģ����ͨ��PD���Ʋ��ԶԲɿ�����·�����ٿ��Ʒ��档���������㶯�����ܵ�Ҫ����ʹ�ɿ������·�����ߡ�
�ο����ף�
[1] Zvi S, William S, Minh H. Trajectory planning of tracked Vehicles[C]//International Conference on Robotics and Automation. 1993: 796-801.
[2] Bekker M G. ����-����ϵͳ����[M]. ������-����ϵͳ���ۡ���������. ����: ��е��ҵ������, 1978: 258-301.
Bekker M G. Theory of land locmotion[M]. Translation Team of Introduction to Terrain Vehicle System. Beijing: China Machine Press, 1978: 258-301.
[3] Wong J Y. Terramechanics and off-road vehicles engineering[M]. Michigan: Butterworth-Heinemann, 2009: 232-252.
[4] Wong J Y. Theory of ground vehicles[M]. John Willy & Sons Inc, 2001: 125-156.
[5] Ahmadi M, Polotski V, Hurteau R. Path tracking control of tracked vehicles[C]//Proc of International Conference on Robotic and Automation. San Francisco, USA, 2000: 2938-2943.
[6] Yeu T K, Hong S, Kim H W, et al. Path tracking control of tracked vehicle on soft cohesive soil[C]//Proc of ISOPE, OMS-2005. Changsha, China, 2005: 168-174.
[7] Kim H W, Hong S, Choi J S, et al. Dynamic analysis of underwater tracked vehicle on extremely soft soil by using Euler parameters[C]//ISOPE, OMS-2005. Changsha, China, 2005: 141-148.
[8] ���. �Ĵ�ʽ������������ߵĵ����彨ģ�о���������[D]. ��ɳ: ���ϴ�ѧ���繤��ѧԺ, 2010: 20-41.
DAI Yu. The modelling research and simulation analysis on the single-rigid-body of tracked miner moving on the seafloor[D]. Changsha: Central South University. College of Mechanical and Electrical Engineering, 2010: 20-41.
[9] Kogure K, Ohira Y, Yamaguchi H. Prediction of sinkage and motion resistance of a tracked vehicle using plate penetration test[J]. Journal of Terramechanics, 1983, 20(3): 121-128.
[10] �ſ˽�. ����������ѧ[M]. ����: ������ҵ������, 2002: 355-399.
ZHANG Ke-Jian. Vehicle terramechanics[M]. Beijing: National Defense Industry Press, 2002: 355-399.
[11] Terzaghi K. Theoretical soil mechanics[M]. New York: Wiley, 1966: 289-365.
[12] John J, Myers, Carl H, Holm R H, McAllister. Handbook of ocean and underwater engineering[M]. New York: McGraw-Hill, 1969: 125-265.
(�༭ ����Ⱥ)
�ո����ڣ�2011-06-15�������ڣ�2011-07-15
������Ŀ�����ʺ��������о�������ʮһ�塱������Ŀ( DYXM-115-04-02-01)���㽭��ѧ���嶯�������ϵͳ�����ص�ʵ���ҿ��Ż�����Ŀ(GZKF-2006001)
ͨ�����ߣ�������(1980-)���У����������ˣ���ʿ�о��������º����Ĵ��ɿ��о����绰��15973129559��E-mail: qingjuehan@yahoo.com.cn
ժҪ����ˮ���ض������������Ĵ�ʽ�ɿ�ֱ�м�ת�����߹��̽��ж���ѧ�����������Ĵ���������λ�������ǿ��֮��Ĺ�ϵ�������ˮ���Ĵ�ʽ�ɿ����ߵļ���λ��Ҫ��ͬʱ���ڿ���������������ѹʵ������ˮ����������������ҵ����£����Ĵ�ʽ�ɿ����˶���ѧ�������˶�ѧ��ģ��ͨ�����棬�õ����Ĵ�ʽ�ɿ�ֱ�м�ת������������Ĵ���ƽ������λ�ơ�ͨ��PD���ƣ��ڱ�֤�Ĵ���·�����ٵ�����£�������λ�ƿ�����Ҫ��ķ�Χ֮�ڣ���֤��ˮ���Ĵ�ʽ�ɿ����߹����еĶ���Ҫ��Ϊ����Ĵ���·���滮�ṩ�����ۻ�����
