
��϶����ͳ�����ʽ�����ƶ������Ż�������
���1��л�ϱ�1���ν���2
(1. ���ϴ�ѧ ��е�����ع���ѧԺ������ ��ɳ��410082��
2. �Ϻ���ͨ��ѧ ��е�붯������ѧԺ���Ϻ���200240)
ժ Ҫ��
�Ϳͳ���˾��ISG(��/����һ���)���Ტ��˫�������϶����ͳ��IJ���ʽ�����ƶ�ϵͳ���Գ��ϵͳ(����͵��)�ij��Ч��Ϊ���Ż�Ŀ�����һ�������ƶ����Ʋ��ԣ�����ԭ����Ħ���ƶ���Ȳ���������Ӧģ��PID�㷨�Ż������ƶ���������ǰ�����ƶ�����ȣ�ʹ֮�ӽ��������ߢ��Ի�ȡ���ĵ��渽�������ʡ�ͨ��Simulink��Cruise�����Ϸ���ģ�ͶԲ��Խ���ģ�ͷ��棬��ʹ��DSPACE��˾��Autoboxϵͳ��ͳ����RCP����ԭ���ڻ�����ƽ̨���о�����������Ż��������ƶ������ڸû�϶����ͳ��ϵ�ʹ���Ż��˿ͳ����ƶ�Ч������ȡ����30%���ҵ��ƶ��ܻ����ʡ�
�ؼ��ʣ�
��϶����ͳ��������ƶ�������Ӧģ��PID�����Ϸ�����RCP�ڻ�������
��ͼ����ţ�U469.72 ���ױ�־�룺A ���±�ţ�1672-7207(2013)01-0122-07
Hybrid electric bus regenerative braking parallel control strategy optimization and simulation
ZHU Hao1, XIE Yubing1, HE Jianhui2
(1. College of Mechanical and Vehicle Engineering, Hunan University, Changsha 410082, China;
2 School of Mechanical Engineering, Shanghai Jiaotong University, Shanghai 200240, China)
Abstract: For the parallel regenerative braking system of a domestic large-sized bus company��s single axis paralleled hybrid electric buses with ISG (Integrated starter generator) motor and two clutch, aiming at making the efficiency of the charging system (motor and battery) optimization, a set of regenerative braking control strategy was controlled. For approaching ideal ��I�� curve to receive the best ground sticking rate, the friction brake ratio of original car was adjusted and the dynamic ratio was optimized between the front and back wheels with the adaptive fuzzy PID algorithm. Strategy model simulation was carried out with the joint simulation model built by Simulink and Cruise. And the in-the-loop simulation was performed with the RCP rapid prototype in-the-loop simulation platform that was constituted by DSPACE company��s Autobox system and the HEV bus. The results show that the optimal regenerative braking control strategy makes the performance of brake better and obtains about 15% of the feedback energy.
Key words: hybrid electric bus; regenerative braking; adaptive fuzzy PID algorithm; joint simulation; rapid prototype in-the-loop simulation
��ͳ�ͳ��ڼ����ƶ���ͣ���ƶ������У���ͨ��Ħ���ƶ������ͳ�����ʻ����ת��Ϊ���ܣ���ʧ�������ϴ�ռ�ͳ���ʻ������30%����[1]��װ����ISG����IJ���ʽ��϶����ͳ�����ͨ��ISG�������Ϊ��������ص�[2]������ISG����ṩ�ƶ��������ƶ������в��ֵ��ƶ��������յ����������[3]�����ǰ�����ƶ������䷽ʽ�IJ�ͬ�ɷ�Ϊ�ƶ������䲻�ɵ��IJ���ʽ�����ƶ�ϵͳ[4]���ƶ�������ɵ��ڵĴ���ʽ�����ƶ�ϵͳ[5]��Sun��[6]����������̶Ȼ����ƶ�����ΪĿ�������ƶ��������տ��Ʋ��ԣ����̶ȵ�ʹ�õ��ƶ�ϵͳ�����ǣ����ڵ��ƶ��ı���������Ҫ���Ͳ����ƶ���ȫ�ԣ�������[7]�Ա�֤�����������ǰ�����ƶ������������ƶ����ܿ��Ʋ��ԣ�ʹ�ƶ����߾��������������ߢ��ڴ˻����ϲſ��������ƶ��Ļ��գ����ϵ�[8]�ڴ�ͳԭ�ͳ������ϣ����ı�ԭ���ƶ�ϵͳ�õ��ƶ���Ħ���ƶ�����һ����������ı������Ʋ��ԣ��ò���ֻ�ǽ����ƶ���Ħ���ƶ��������У��ڻ����ʺͰ�ȫ������һ��ȱ�ݡ�ǰ2�ַ�ʽ���ڴ���ʽϵͳ������Ҫһ��ר�ŵ��ƶ�������ϵͳ����ԭ�����ƶ�ϵͳ����ϴ��������Ʋ�����Ȼ�Կͳ��Ķ���С�����ǣ�����ֱ����ԭ�����ƶ���������ϼ����������ƶ����أ�����֤�ͳ��ƶ����ȶ���[9]���ڴˣ����ĶԴ�ͳ����Ħ���ƶ�������������Է��ϵ��ƶ������ǰ�����ƶ�������ľ��⣬ͬʱ���ƶ����������Ż�Ϊ�����Ƶ���ڱ�֤�ƶ���ƽ���ǰ���»������������ʹ���й����ͳ��ڰ�ȫ��ƽ���ƶ�ǰ����ȡ�ýϸߵĽ����ʡ�
1 ��϶����ͳ���ʽ�����ƶ�ϵͳ
���ĵ��о������ǹ���ij���Ϳͳ���˾�ij���ΪISG���Ტ��˫�������϶���12 m���й����ͳ�����������15.6 t�����Ϊ9 550 mm��ӭ�����8.2 m2��̥�������뾶Ϊ0.493 m������Ч��Ϊ0.87���ƶ�ϵͳΪ���������ڷ�����ѹʽ�ƶ�ϵͳ��ISG���(�����Ϊ40 kW���ת��Ϊ1 340 r/min�����ת��Ϊ2 500 r/min����ֵ����Ϊ60 kW���ƶ����ؼ����ں���(������)������ѹ�ƶ�ϵͳ���ɲ�ʽ�����ƶ�ϵͳ��ϵͳ�ṹ��ͼ1���ƶ�ϵͳ������ͨ���ͳ��ͳ����ϵĴ������ɼ��ͳ���ʻ��Ϣ(�������١����ٶȼ����ֽ��ٶȵ�)���ۺ϶��ƶ�̤����ƶ���������н�����ȷ������ƶ�����ı��������������źš�����ͱ��������յ������źź��տ�����Ҫ����������ƶ����غ�Ħ���ƶ�����[10]��
2 �����ƶ����Լ��Ż�
�ڵ��ٹ������ƶ�ʱ������ĸ�Ӧ��ѹС�������Ļ��������dz�С����Ƶ����С�������Ե�������зdz����Ӱ�죻ͬʱ������ڵ�ת���µĴ�Ť������Ҳ��Ե������һ�����[11]�����ԣ��ڿ��������ƶ�����ʱ����Ҫ���ǵ�غ͵���ij��Ч�ʡ��������ƶ�ϵͳЧ�������Ϊ�Ż�Ŀ����п�����ƣ��Ż�Ŀ�꺯��Ϊfmax(pm0)������͵��ϵͳЧ������ʱ�������ƶ�����ΪPm0����Ӧ���������ƶ���Ϊ
 (1)
(1)
ʽ�У�Tm0Ϊ���Ź����µĵ���ƶ�ת�أ�RΪ��̥�뾶����tΪ����ϵͳЧ�ʣ�nmΪ��ǰ���ת�٣�i g��io�ֱ�Ϊ���������ͱ�������ǰ�ٱ�[12]���ں���(������)�ϣ����ƶ���������ƶ����ı���Ϊ ��
��
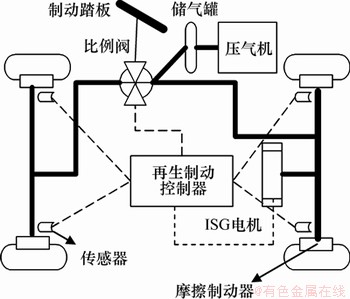
ͼ1 �����ƶ�ϵͳ�ṹͼ
Fig.1 Regenerative braking system
Ϊ�˱�֤�ƶ�ϵͳ�İ�ȫ�ԣ�ͨ�������ͳ�ǰ���غɣ���ʽ(2)���Ƴ������ƶ������ߢ�
 (2)
(2)
ʽ�У�GΪ�ͳ�����(N)��hgΪ���ľ������룻bΪ�ͳ����ĵ��������ľ�(m)��LΪ��ࣻ ��
�� �ֱ�Ϊǰ�������ƶ�����
�ֱ�Ϊǰ�������ƶ�����
�����ߢ����ͳ��Ե��渽��������������ߣ��ͳ����ƶ���ȫ����á�ǰ�����ֵ��ƶ������ÿ��������ߢ���������ȵ����õ��渽��ϵ����ֹ������
�������ҹ���������й����ͳ��ϲ�û�а�װ�ƶ��ȵ���װ�أ�������ʵ��������ı��ƶ��ȷ��䣬���ԣ���ȡ�̶��ƶ��ȷ���ķ�ʽ��Ϊ�����ƶ���ǰ�����־������������������е��о�����ͳ��ԭ����ǰ�����Ḻ�ز�ͬ��ʹǰ���ƶ�������Ħ���ƶ���֮�� ��
��
Ϊ�˸��õط��������ƶ�ϵͳ�����ã��ڻ����������ʡ��ƶ�ǿ�Ƚϵ�ʱ�����ֿ��Ը�������������ƶ�����ά��ǰ���ֵ��ƶ�ƽ�⣻�����ƶ�ǿ�Ƚӽ������ƶ�״̬ʱ��Ϊ��ʹ�ͳ��ƶ���ȫ�������ƶ���ȫ�رգ����������ϵ��ƶ�������Ħ���ƶ������ݲ��ԣ���ԭ��ǰ���ƶ����ƶ���� ���п��Ƶ��������ƶ�ǿ��z����0.4���Σ����ͺ���Ħ���ƶ���
���п��Ƶ��������ƶ�ǿ��z����0.4���Σ����ͺ���Ħ���ƶ��� ��Ϊ�����ƶ����ṩ�ռ䣬���ɵ��ƶ��ں������
��Ϊ�����ƶ����ṩ�ռ䣬���ɵ��ƶ��ں������ ���й���
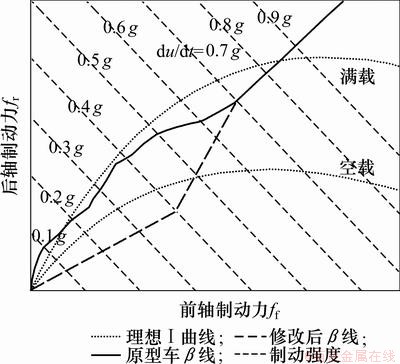
���й��� �����ƶ�ǿ�ȸ���0.4���Σ����ɲ���ԭ���ƶ��������z��0.7ʱ���������н����ƶ�������ǰ���ǰ������Ħ���ƶ�������ͼ2��
�����ƶ�ǿ�ȸ���0.4���Σ����ɲ���ԭ���ƶ��������z��0.7ʱ���������н����ƶ�������ǰ���ǰ������Ħ���ƶ�������ͼ2��
�����ƶ������������ֵ��ƶ���������Ϊ��ʹ���ƶ�������ǰ�������ƶ����ܸ������ߢ�������Ӧģ��PID[13]���Ʒ��������������ƶ�ת��(ԭ����ͼ3)��
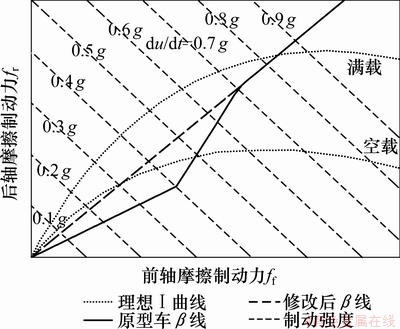
ͼ2 ����ǰ���Ħ���ƶ�������
Fig.2 Braking force ratio after adjustment
��ʵ���ƶ�����Ŀ���ƶ��ȵ����e�����仯��de��Ϊ�������ģ������ģ�����������������ʵ�KP��KI��KDϵ����Ϊ���ֵ����Ŀ���ƶ����Ƚ�������Ӧ��̬���ڡ���de�仯��Χ
 ����Ϊģ�����ϵ�������ģ���Ӽ�Ϊ��
����Ϊģ�����ϵ�������ģ���Ӽ�Ϊ��

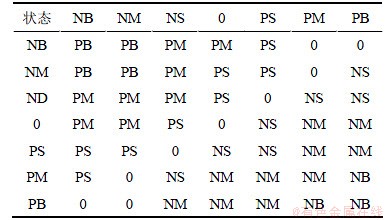
���У�NB��NM��NS��ZO��PS��PM��PB�ֱ���������ϴ�С���㡢��С�����ϴ�������e��de������̬�ֲ���KP KI KD����������������[14]�����ݸ�ģ���Լ��������ȸ�ֵ��������ģ������ ģ�͡�
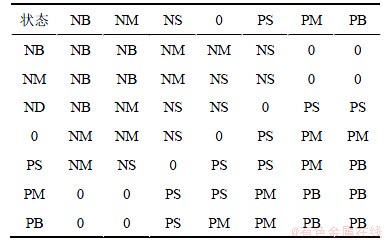
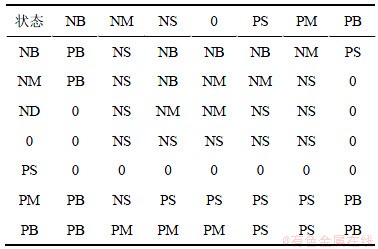
���ݾ��飬����KP�ܼ�С��̬����KP�������������������ԣ������e�ܴ�ʱ������KP��KI��������������ڵ��ڳ�����������ϴ������ڵ���ǰ�ڼ�СKI�����ڽ�����KDӰ����ڵĶ�̬���ԣ��ڳ�������KD���Խ��ͳ�����������KDӦ�ñ����ʵ�С������Ӧ�ü�С���Ա�֤ϵͳ�ȶ�[15]������PID����������ͳ������ƶ�����ϵͳ�Ĺ�ϵ��ȷ��KP��KI��KD 3��ϵ����ģ�����ƹ����������1~3��
Ӧ��ģ���ϳ�������Ƶ�KP��KI��KDģ�����ƹ��������������������� ��
�� ��
�� ��������ӦУ������������Ӧģ��PID�����Ժ��ƶ��������ͼ5��
��������ӦУ������������Ӧģ��PID�����Ժ��ƶ��������ͼ5��
��ͼ5�ɼ������ƶ�ǿ��z��0.4ʱ�����������ƶ��IJ��룬���ֵ��ƶ����ܹ������������ƶ�������ߢ�����0.4��z��0.7ʱ������ﵽ�ƶ���������������ʣ������ƶ����������½�����z�ﵽ0.7ʱ�������ƶ����رգ�ǰ�������ƶ�������ָ�������(ͼ2��ʾ)���н����ƶ���
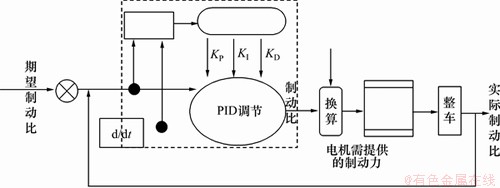
ͼ3 ģ������ӦPID����ʾ��ͼ
Fig.3 Adaptive fuzzy PID algorithm
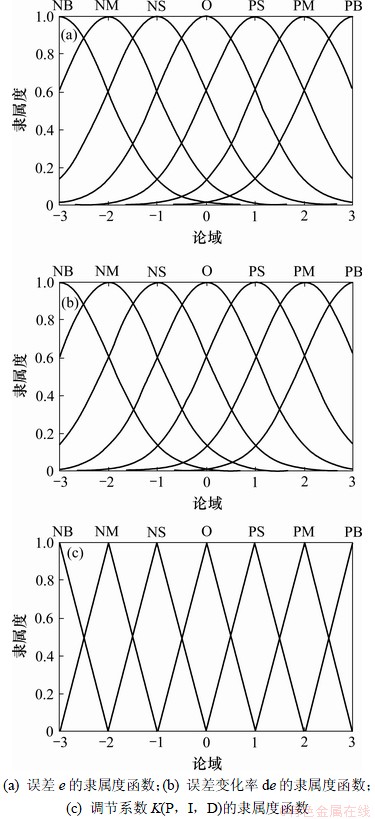
ͼ4 �����Ⱥ���
Fig.4 Membership function
��1 KP��ģ�������
Table1 Fuzzy rule of KP
��2 KI��ģ�������
Table 2 Fuzzy rule of KI
��3 KD��ģ�������
Table 3 Fuzzy rule of KD
ͼ5 �Ż����ǰ�������ƶ�������ͼ
Fig.5 Braking force ratio before and after optimization
3 ����ģ�ͷ���ʵ�鼰�������
����Simulink�е�PIDģ���ģ�����߰��������ƶ����Ʋ��Խ��н�ģ������dll����ʽ���뵽cruise���������У���ǰ���������ķ���ģ�����ӣ��������Ϸ���ʵ�顣���Ϸ���ģ�ͼ�ͼ6��
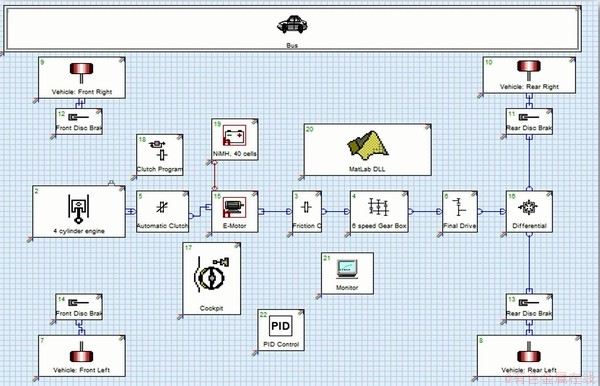
ͼ6 ���Ϸ���ģ��ͼ
Fig.6 Coalition simulation model
ͨ���豸���ɼ��������ݳ���·��ģ��(��ͼ7)���뵽����ģ���С�
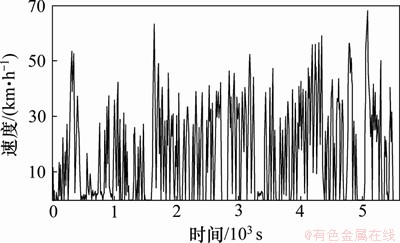
ͼ7 ���ݳ���·��ģ��ͼ
Fig.7 City road spectrum of Suzhou
��ͬ�����ķǻ춯��Ϊ�����飬�Ե�س�ŵ�״̬SOCά��(SOCֵ��ʵ����ά����75%����)Ϊ������ѭ��ʵ�飬ȡ�ò���ʽ�����ƶ�ϵͳ���Ϸ�����������4��
��4 ���Ϸ���ʵ������
Table 4 Coalition simulation data
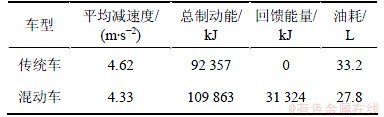
�ɱ�4��֪���Ż��IJ��������ƶ����������ݳ��й���·���µ�ƽ�����ٶ�Ϊ4.33 m/s2���봫ͳ����������½������ƶ�������Լ9%������Ҫ������Ƶ�����ƶ�ǿ���´��������ƶ��������ƶ�����Ϊ31 324 kJ��ռ�����ƶ��ܵ�30%���ң����ջ�ý�����Ϊ16%��
4 RCP����ԭ���ڻ�ʵ��
Dspace��˾��RCP(����ԭ�ͷ���)�ڻ�����ƽ̨��matlab�����������������ӣ������ڿ���Ӳ������֮ǰ����Autobox��Ϊ������Ӳ����matlab�н����Ŀ���ģ��ֱ��ת��Ϊ����������ƿͳ����߲��������Ʋ�����ת���Լ�����ԵĿ����ԡ��Կͳ���˾ij12 m����Դ����Autobox��������ƶ�RCP�ڻ�ʵ��ƽ̨�����ͳ���CAN���������źŲɼ��˿���Autobox����������Autoboxͨ��ר�ŵ�����������ʼDZ�������������ṹ��ͼ8��
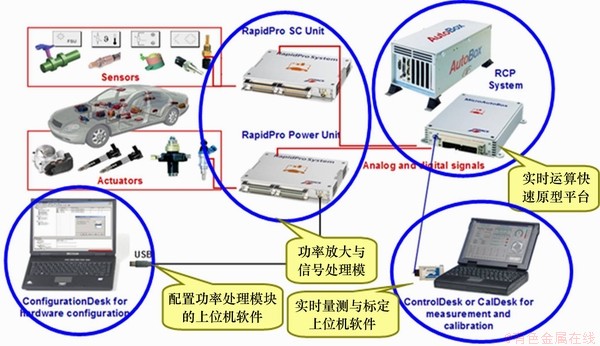
ͼ8 RCP�ڻ�ʵ��ƽ̨
Fig.8 Test platform of RCP in-the-loop
����ʵ���������Controldesk���Կ��ӻ����ͳ�����������ת״̬�����ǵ��ͳ���ȫ���ͳ�����������ʻ������ʼ�ٶ�Ϊ80 km/h�����ƶ�ǿ��z�ֱ�Ϊ0.3��0.5��0.8ʱ�����ڻ��������飬�����ͼ9��ʾ��
��ͼ9�ɼ��������ƶ������ܽϺõضԵ��ƶ�����Ħ���ƶ������з��䣬�����Ƴ����ȶ��½�����z=0.3ʱ�����ƶ�ռ���ƶ����ı����ϴ���Ϊ��Ҫ���ƶ�����������������������10 s����80 km/h�Ȳ��½���19.7 km/h����غɵ�״̬��(SOC)��65%�ȶ�������81%���ң���z=0.5ʱ�����ƶ��Ѿ��ﵽ����������ʣ�Ħ���ƶ��ı����Ӵ����½��ٶȼӿ죬��7 s�����ٶȽ�Ϊ0 km/h�����ڵ����������ѳ��Ч���£�SOCֵ���ƶ����ʱ����������86%����z=0.8ʱ�����ƶ���ȫֹͣ����������ƶ���Ħ���ƶ��е�ȫ���ƶ������ƿͳ���3.2 s��Ѹ���ƶ���ֹ������δ���������ƶ���SOCֵ�ޱ仯��
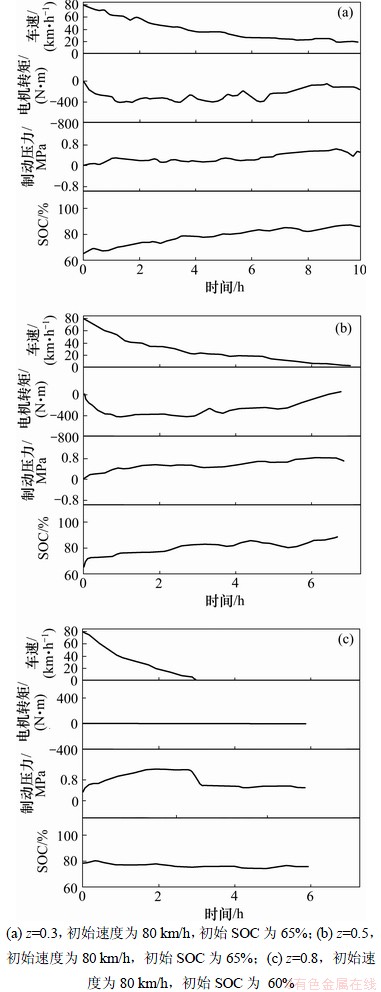
ͼ9 RCP�ڻ�����ʵ������
Fig.9 RCP in-the-loop simulation
5 ����
(1) ͨ�����ڻ�϶���ԭ�Ϳͳ�Ħ���ƶ��ȷ������ߣ��ƶ����Գ��ϵͳЧ�����Ϊ�Ż�Ŀ��IJ�ʽ�����ƶ����ԣ�ʹ�������ڷǽ����ƶ������³е�������ƶ�����Ϊ�������ƶ��ļ����ṩ�����䡣
(2) ������ƺ�ǰ�����ֵ�ʵ���ƶ�����ȽϺõظ������������ߢ���˲���ʽ�ƶ�ϵͳ�Ե��渽��ϵ�������Բ�����⡣
(3) �����ݳ��й����£���ԭ�ͳ���ȣ������Ż���Ļ�϶����ͳ�ȡ����30%���ҵ��ƶ��ܻ����ʣ�ʹ���������ʴﵽ16%��
(4) RCP����ԭ���ڻ�����������֤�˸������ƶ��Ż�������Ŀ��ͳ��ϰ�ȫ�ԡ��ڵ��ƶ�ǿ���£��ƶ���ȫ�ԽϺã����ƶ�ռ���ƶ���������Ӧ�����ܻ������������е��ƶ�ǿ���£����ƶ��ﵽ��ֵ�������ӣ�Ħ���ƶ���ʼռ��Ҫ��λ���ṩ������ƶ������ڽ����ƶ�ǿ���£����ƶ��˳�����ȫ����Ħ��Ƭ������ƶ�����3.2 s������ƶ����̣���֤���ƶ��İ�ȫ�ԡ�
�ο����ף�
[1] �ſ���, ½��, ������. ��϶������пͳ��ƶ���������ϵͳ��·����[J]. ��е����ѧ��, 2009, 45(2): 25-30.
ZHANG Junzhi, LU Xin, ZHANG Pengjun. Road test of hybrid electric bus with regenerative braking system[J]. Journal of Mechanical Engineering, 2009, 45(2): 25-30.
[2] ����, ���Ļ�, �ش�ͬ. ISG��϶��������ƶ�ϵͳѹ��Э�����Ʋ���[J]. �� �� �� ѧ ѧ ��, 2009, 32(5): 493-498.
YANG Yang, YANG Wenhui, QIN Datong. Coordinated pressure control of a regenerative braking system based on a hybrid electric vehicle with an integrated startor and generator[J]. Journal of Chongqing University, 2009, 32(5): 493-498.
[3] �ν���, ����. ˫�������϶���ϵͳ˲̬�����ķ���[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2011, 42(1): 73-79.
HE Jianhui, YANG Lin. Simulation of transient conditions on double clutch hybrid power system[J]. Journal of Central South University: Science and Technology, 2011, 42(1): 73-79.
[4] �����, �˾Ŵ�, ������. ���������ƶ����Ʋ��Է����о�[J]. �����Ӧ��������, 2010, 27(12): 184-185.
WANG Xinyan, GU Jiuchun, LI Yonghe. The simulation for optimization of parallel regenerative braking control strategy[J]. Computer Applications and Software, 2010, 27(12): 184-185.
[5] �ſ���, Ѧ����, ½��. ��϶������пͳ�����ʽ�ƶ�������������[J]. ��е����ѧ��, 2009, 45(6): 102-106.
ZHANG Junzhi, XUE Junliang, LU Xin. Series regenerative braking technique for hybird electric buses[J]. Journal of Mechanical Engineering, 2009, 45(6): 102-106.
[6] SUN Hui, JING Junqing. Research on the system configuration and energy control strategy for parallel hydraulic hybrid loader[J]. Automation in Construction, 2010, 19: 213-220.
[7] ������. ��϶���������ʽ�ƶ�ϵͳ����������ܷ���[D]. ����: ���ִ�ѧ��������ѧԺ, 2005: 10-35.
WANG Pengyu. The design and simulation of the regenerative brake system of hybrid vehicle[D]. Changchun: Jilin University. Institute of Automotive Engineering, 2005: 10-35.
[8] ����, ����, ����. EQ 6110 ��϶����綯���������ƶ����Ʋ����о�[J]. ��������, 2004, 26(3): 253-256.
GENG Cong, LIU Li, ZHANG Xin. A study on control strategy for regenerative braking in EQ6110 hybrid electric vehicle[J]. Automotive Engineering, 2004, 26(3): 253-256.
[9] �갮��, ����, ���ܷ�. CA7204������������ϵƥ��������Ż�[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2011, 42(3): 677-680.
SHEN Ailing, FU Jun, ZHANG Yanfa. Matching simulation for engine and power train system of CA7204 automobile and its optimization[J]. Journal of Central South University: Science and Technology, 2011, 42(3): 677-680.
[10] ���, �ش�ͬ, ������. ��Ȼ�϶������������ƶ�������������[J]. ��е����ѧ��, 2009, 45(1): 157-173.
SHU Hong, QIN Datong, HU Minghui. Regenerative braking energy management strategy for mild hybrid electric vehicles[J]. Journal of Mechanical Engineering, 2009, 45(1): 157-173.
[11] ��־��. ��������[M]. 5��. ����: ��е��ҵ������, 2009: 89-119.
YU Zhisheng. Automobile theory[M]. 5th ed. Beijing: China Machine Press, 2009: 89-119.
[12] �����, ������ά��. ��������ѧ[M]. 4��. ������, ��ǿ, ��. ����: �廪��ѧ������, 2009: 156-210.
Mitschke M, Wallentowitz H. Vehicle dynamics[M]. 4th ed. CHEN Mengsan, YU Qiang, trans. Beijing: Tsinghua University Press, 2009: 156-210
[13] ��ӱ, Ԭ����. ����������ϵͳ��ģ��PID�����㷨�о�[J]. ���������, 2008, 27(12): 312-315.
ZHANG Ying, YUAN Zhaohui. Fuzzy-PID algorithm research about anti-lock braking system[J]. Computer Simulation, 2008, 27(12): 312-315.
[14] GAO Dawei, JIN Zhenhua, LU Qingchun. Energy management strategy based on fuzzy logic for a fuel cell hybrid bus[J]. Journal of Power Sources, 2008, 185: 311-317.
[15] �º�Ȼ. ��������/��ط��ϴ���ʽ��϶����������Ʋ����о�[D]. �Ϻ�: ͬ�ô�ѧ�е�ѧԺ, 2008: 60-85.
CHEN Haoran. Study on the control strategy for hybrid electric vehicle employed capacitor/battery[D]. Shanghai: Tongji University. Sino-Germany Institute, 2008: 60-85.
(�༭ �²ӻ�)
�ո����ڣ�2012-06-10�������ڣ�2012-08-12
������Ŀ������ʡ����ҵ��ר��(2012GK4009)
ͨ�����ߣ����(1972-)���У����������ˣ������ڣ�˶ʿ����ʦ�����µ綯�������Ƽ�������������ѧ�о����绰��13975166318��E-mail: zhu1201_1@163.com
ժҪ: ��Թ���ij���Ϳͳ���˾��ISG(��/����һ���)���Ტ��˫�������϶����ͳ��IJ���ʽ�����ƶ�ϵͳ���Գ��ϵͳ(����͵��)�ij��Ч��Ϊ���Ż�Ŀ�����һ�������ƶ����Ʋ��ԣ�����ԭ����Ħ���ƶ���Ȳ���������Ӧģ��PID�㷨�Ż������ƶ���������ǰ�����ƶ�����ȣ�ʹ֮�ӽ��������ߢ��Ի�ȡ���ĵ��渽�������ʡ�ͨ��Simulink��Cruise�����Ϸ���ģ�ͶԲ��Խ���ģ�ͷ��棬��ʹ��DSPACE��˾��Autoboxϵͳ��ͳ����RCP����ԭ���ڻ�����ƽ̨���о�����������Ż��������ƶ������ڸû�϶����ͳ��ϵ�ʹ���Ż��˿ͳ����ƶ�Ч������ȡ����30%���ҵ��ƶ��ܻ����ʡ�
[1] �ſ���, ½��, ������. ��϶������пͳ��ƶ���������ϵͳ��·����[J]. ��е����ѧ��, 2009, 45(2): 25-30.
[2] ����, ���Ļ�, �ش�ͬ. ISG��϶��������ƶ�ϵͳѹ��Э�����Ʋ���[J]. �� �� �� ѧ ѧ ��, 2009, 32(5): 493-498.
[3] �ν���, ����. ˫�������϶���ϵͳ˲̬�����ķ���[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2011, 42(1): 73-79.
[4] �����, �˾Ŵ�, ������. ���������ƶ����Ʋ��Է����о�[J]. �����Ӧ��������, 2010, 27(12): 184-185.
[5] �ſ���, Ѧ����, ½��. ��϶������пͳ�����ʽ�ƶ�������������[J]. ��е����ѧ��, 2009, 45(6): 102-106.
[7] ������. ��϶���������ʽ�ƶ�ϵͳ����������ܷ���[D]. ����: ���ִ�ѧ��������ѧԺ, 2005: 10-35.
[8] ����, ����, ����. EQ 6110 ��϶����綯���������ƶ����Ʋ����о�[J]. ��������, 2004, 26(3): 253-256.
[9] �갮��, ����, ���ܷ�. CA7204������������ϵƥ��������Ż�[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2011, 42(3): 677-680.
[10] ���, �ش�ͬ, ������. ��Ȼ�϶������������ƶ�������������[J]. ��е����ѧ��, 2009, 45(1): 157-173.
[11] ��־��. ��������[M]. 5��. ����: ��е��ҵ������, 2009: 89-119.
[12] �����, ������ά��. ��������ѧ[M]. 4��. ������, ��ǿ, ��. ����: �廪��ѧ������, 2009: 156-210.
[13] ��ӱ, Ԭ����. ����������ϵͳ��ģ��PID�����㷨�о�[J]. ���������, 2008, 27(12): 312-315.
[15] �º�Ȼ. ��������/��ط��ϴ���ʽ��϶����������Ʋ����о�[D]. �Ϻ�: ͬ�ô�ѧ�е�ѧԺ, 2008: 60-85.
