
DOI: 10.11817/j.issn.1672-7207.2015.01.014
���϶������������ʽѪ�õĵ������
̷��̷��ƽ����������̷�
(���ϴ�ѧ ���繤��ѧԺ�������ܸ�����������ص�ʵ���ң����� ��ɳ��410083)
ժ Ҫ��
��������ϵͳ����������������Ч�ʺ��ȶ��ԣ�������ݲ۶�����������ʽѪ�õĴ��϶����������������ϵͳ���������غͿռ�ų��ֲ�������Խ����о����������ݲ۶����������غͿռ�ų�����ģ�ͣ�����MATLAB���������������ģ�ͣ���������ֵ��ANSYS��ֵ���ֵ�Աȣ�ͨ��ʵ����������غͿռ�ų�����ģ�ͺͷ���ģ�ͽ�����֤���о�����������������غͿռ�ų���ѧģ����ȷ��Ѫ�������й������ȶ���������ת������ʧ������ϵͳ����Ч����ߣ���������ͼ�С���Ӵż�����������������������Ӵż����λ����x����λ��0 mm��y�������С��60 mm��z�����ڡ�1.5 mm�ڣ������ϵͳ�������������о�Ϊ���϶�������������Ŀ������ṩ��;�������ݡ�
�ؼ���: �������������ݲۣ��������أ��ռ�ų�
��ͼ����ţ�TH133.4 ���ױ�־�룺A ���±�ţ�1672-7207(2015)01-0099-08
Electromagnetic characteristics of large gap magnetic driving axial flow blood pump
TAN Zhuo, TAN Jianping, LIU Yunlong, TAN Wei
(State Key Laboratory for High Performance Complex Manufacturing, School of Mechanical and Electrical Engineering,
Central South University, Changsha 410083, China)
Abstract: In order to improve the drive capability, feasibility and stability of the large gap magnetic driving system, a large gap magnetic driving system driven by three-alveolar stator was put forward, and the electromagnetic characteristics of driving torque and space magnetic field distribution for the system were studied. In addition, the mathematical model of driving torque and space magnetic field of the three alveolar stator were created. The mathematical theoretical model was solved by using the Matlab, whose analytical values were compared with ANSYS numerical values, and the theoretical model and ANSYS simulation model of the driving torque and space magnetic field were verified through experiment. The results show that the driving torque and space magnetic field mathematical model is correct. It is stable in the operation of axial flow blood pump, there is no feature out of step, system transmission efficiency is improved, and increasing the current and reducing the pole coupling distance can improve the driving capability. The three alveolar stator and permanent magnet��s relative position is 0 mm in x direction, less than 60 mm in y direction and ��1.5 mm in z direction, which can improve the system��s driving capability. The research can provide methods and basis for the feasibility of large gap magnetic driving technology.
Key words: magnetic drive; three alveolar; driving torque; space magnetic field
����ʽѪ�þ������С���ܺĵ͡������ɿ����ȶ��Ժá���������ȸߵ��ŵ㣬Ŀǰ�㷺Ӧ���ڸ���������������������˥����[1-4]����Ѫ�õ����������У�Ѫ���������������������Ҫ�Ǿ���Ƥ��������������ܺ�ֲ���������ڵĵ�ع���[5]����Ƥ�������߹���������ɸ�Ⱦ�����ڵ�ع�����Ŀǰ������켼�����ƣ��һ�����������죬2�ֹ��ܷ�ʽ�����ʺϳ���ʹ�á�������ų��������ܹ����⾭Ƥ������������ĸ�Ⱦ�Լ����ڹ����������������⣬����Խ��Խ�õ��о���Ա�Ĺ�ע[6]����쿵�[7]����˵��ٳ�������������ת�ų������������ʺ�Ѫ����������������Ҫ��ʱ�ĸ���ת����Ϊʵ���ڿ����������������������[8]�����ͨ���ⲿ��Ȧ�����ų��ķ������������[9]���ͨ�����������Ⲽ����Ȧʵ��Ѫ�õĴų��������������������ϴ�Pan��[10]���ͬ��������ϵ�������ʽ�����������������ܷ�Ѫ�ã��о���3�ֲ�ͬ��������еĴų��ֲ�������(����)�����Ӵż���϶��4~30 mm֮�䣬��ʵ���ٴ�Ӧ������������ų��������Ӵż���϶Ӧ��30~60 mm֮��[11]��̷��ƽ��[12-13]�����U�͵������������Ѫ�õķǽӴ�ʽ�����������������Ľ��˼��ִų�����������������ϵͳ���Ӵż���϶������������С��Ч�ʵ͵�ȱ�㡣���������˥����������ʽѪ������ų�������������ݲ۶�������Ѫ�õ�����ų����������������ۼ��㡢ANSYS��ֵ�����ʵ��3�������ϵͳ���������غͿռ�ų�������Խ����о����Ա�Ϊ��ߴ��϶�������������Ŀ������ṩ;�������ݡ�
1 ���ݲ۶�������Ѫ��ϵͳ���
ͼ1��ʾΪ����ʽѪ��ʾ��ͼ������ʽѪ����Ҫ����С�Ҷ�֡������幹�ɡ�
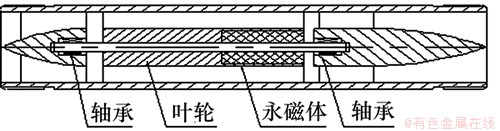
ͼ1 ����ʽѪ��ʾ��ͼ
Fig. 1 Schematic diagram of axial flow blood pump
ͼ2��ʾΪ�����ݲ۶�����������ʽѪ����������Ĵ��϶��������������ͼ�У����ݲ۶���Ϊ�����ż���������Ϊ�Ӷ��ż�����ͼ2��ʾ����ϵ�£���������ǶȦ�Ϊ0~90��ʱ����Ȧ(1�š�2�ź�3��)�����Ĵż�״̬ΪNNS����������ǶȦ�Ϊ90��~180��ʱ���ż�״̬ΪSNN����������ǶȦ�Ϊ180��~270��ʱ���ż�״̬ΪSSN����������ǶȦ�Ϊ270��~360��ʱ���ż�״̬״̬ΪNSS��ϵͳ�е�Ƭ�����Ƶ�·ʵ����Ȧ�е����Ľ���ı䣬�Ӷ�ʵ�����ݲ۶��ӵĴż�״̬��Ԥ���л���
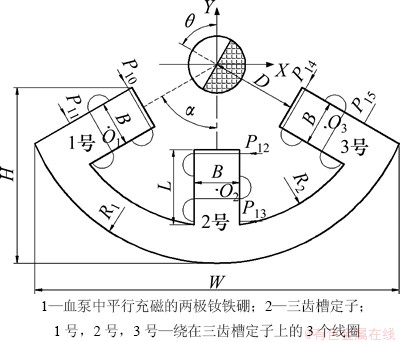
ͼ2 ��������ʾ��ͼ
Fig. 2 Schematic diagram of magnetic drive system
2 ϵͳ�����������
2.1 ����������ѧģ��
�����崫�����ؿ��Կ����������Ч�����ڴŸ�Ӧǿ��ΪB����ų����ܵ������ش�����������ת�ء���
 (1)
(1)
��
 (2)
(2)
ʽ�У�JmΪ������ܶȣ�jmΪ������ܶȣ�MΪ������Ż�ǿ�ȣ�nΪ��������浥λ����ʸ����rΪ����Ԫ�����������ĵ�ʸ����V��S�ֱ�Ϊ�����������ͱ������
��������[14]��ͨ��������Ƶ���ϵͳ������������ģ��Ϊ
 (3)
(3)
ʽ�У�r1Ϊ�������⾶��r2Ϊ�������ھ���lΪ���������ȣ� Ϊ�ż��ֽ�����y��ļнǣ�Bx��By�ֱ�Ϊ�ռ����x��y����ĴŸ�Ӧǿ�ȡ�
Ϊ�ż��ֽ�����y��ļнǣ�Bx��By�ֱ�Ϊ�ռ����x��y����ĴŸ�Ӧǿ�ȡ�
2.2 �������ط���
2.2.1 ��������
����ANSYS������ϵͳ�������ؽ�����ֵ��⣬����ϵͳ��Magnetic-Nodel��ų�����ģ�飬���ñ���λ�������������ؽ�����⡣��1��ʾΪ����Ԫ���������Ҫ����ֵ��
��1 ����Ԫ��ģ���������Ҫ����
Table 1 Main parameters of finite element modeling and simulation analysis
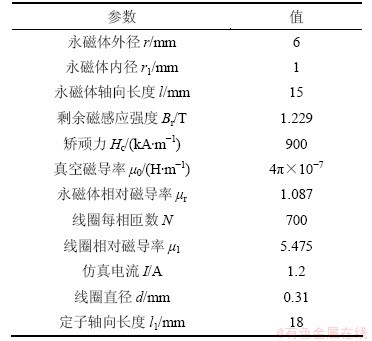
����ͼ2����ʵ�彨ģ������Ԫ���ּ����ء�ͼ3��ʾΪϵͳ��ά����Ԫģ�͡����ݲ۶�������������ⷽ�����ñ���λ�����������û�Ԫģ���������������ˣ��ڷ��潨ģʱ����Ҫ������Ȧ������άģ�ͣ�ֻ����ʩ�ӵ���Դ����ʱ���ݴż�״̬ʩ�ӵ���Դ��Ԫ������ʵ�嵥ԪΪSOLID98���������������֣��ܵ�ԪΪ133 829����������ԪΪSOURC36��Ԫ���߽�ΪINFIN47��Ԫ��ϵͳ���ò�ֱ��Ʒ�������⡣
ͼ3 ϵͳ��ά����Ԫģ��
Fig. 3 Three-dimensional finite element model of system
2.2.2 ���������
����ʽ(3)������MATLAB�е�M������д�������ر���ʽ�����ֺ�������ϵͳ�Դ���dblquad���������־�������Ϊ0.001����ʽ(3)�еı������и�ֵ����������������ء��о�Ӱ��ϵͳ�������ص���Ҫ������������Ͼ������������صĹ�ϵ����������ֵ������Ԫ���ֵ���жԱȡ�
����Ͼ���Ϊ30 mm(y����)ϵͳ������������ʱ����������3����Ȧ�ķ����������Ϊ0.8~1.6 A��ϵͳ�������صķ���ֵ�ͽ���ֵ��ͼ4��ʾ����ͼ4��֪������ͨ�����������ϵͳ������������֮���ʿ�ͨ��������Ȧ�����ķ�ʽ�����ϵͳ������������
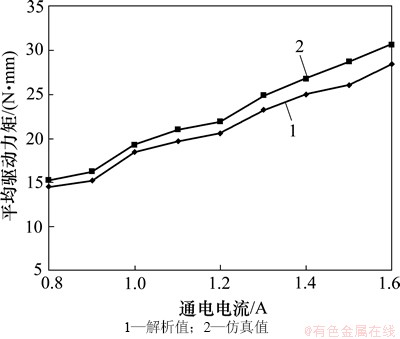
ͼ4 ��Ȧͨ���������������Ӱ��
Fig. 4 Influence of electric current of coil on driving torque
���������Ϊ1.2 A��ϵͳ������������ʱ���ֱ���������������Ͼ�����Ϊ20 mm��60 mm��ϵͳ�������ط���ֵ�ͽ���ֵ��ͼ5��ʾ����ͼ5��֪��ϵͳ����������y������Ͼ�����Ƴ�ֱ�߹�ϵ��������Ͼ��������ϵͳ��������������С��Ϊ���ϵͳ�������أ�������ģ�Ӧ������С��Ͼ��롣
��ͼ4��ͼ5��֪��������������������һ�£����ߴ��ڽ�С�������Ҫԭ�����ڷ��潨ģʱ�����Ƭ�Ĵŵ�����Ϊ��ֵ��
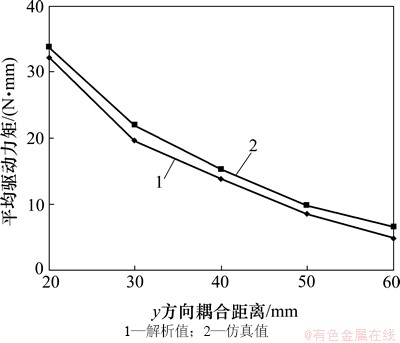
ͼ5 ��Ͼ������������Ӱ��
Fig. 5 Influence of coupling distance on driving torque
3 ϵͳ�ռ�ų��о�
3.1 �ռ�ų���ѧģ��
��������[15]��ͨ����Ȧ�ڿռ��������Ĵų���Ӧǿ�ȱ���ʽΪ
 (4)
(4)
ʽ�У�RΪ��Ȧ��Ч�뾶����ʽ(4)�ɼ�����ϵ��ЧΪֱ������ϵ�����ݲ۶��ӳݵ�3����Ȧ�������Ĵų��ɵ�ЧΪ�ɶ���3���ݵij�����N����Ȧ����������O1��O2��O3�ֱ�Ϊ1�š�2�ź�3����Ȧ�������ģ�ÿ����Ȧ��O1��O2��O3Ϊԭ�㽨����ֱ������ϵ����ͼ6��ʾ��ʽ(5)Ϊ���ÿ����Ȧ�����ĴŸ�Ӧǿ��
 (5)
(5)
�������弸�����Ľ�����ֱ������ϵ������O1��O2��O3��ֱ������ϵƽ������ֱ������ϵ�£�ʵ��1�š�2�ź�3����Ȧ�����Ĵų�������O���е��ӡ�
�����ݲ۶��Ӵż�4��״̬�е�NNSΪ�����ɵ�ϵͳ�ռ�Ÿ�Ӧǿ����x��y��z 3������ı���ʽΪ
 (6)
(6)
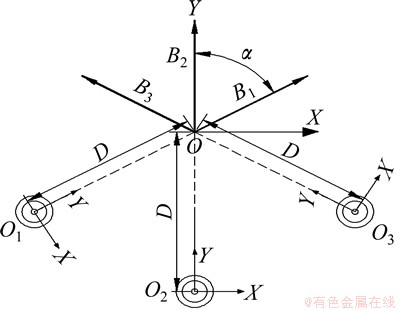
ͼ6 ���ݲ۶��Ӵų�����ʾ��ͼ
Fig. 6 Magnetic field superimposed diagram of three alveolar stators
��
ʽ�У�DΪ1�ţ�2�ź�3����Ȧ�����ĵ������������ת������O�ھ������λ�ƣ� Ϊ���ݲ۶�����NNS״̬�µĴŵ��ʣ�x��y��zΪ�ռ�ֱ������ֵ��B1Ϊ�����NNSͨ��״̬�¿ռ�ij��ĴŸ�Ӧǿ�ȣ�Bx1��By1��Bz1Ϊ�����NNS״̬�¿ռ�ų���x��y��z����ĴŸ�Ӧǿ�ȡ�ͬ�����ɵõ�SNN��SSN��NSS״̬�µ����Ŀռ�ų���ѧģ�͡�
Ϊ���ݲ۶�����NNS״̬�µĴŵ��ʣ�x��y��zΪ�ռ�ֱ������ֵ��B1Ϊ�����NNSͨ��״̬�¿ռ�ij��ĴŸ�Ӧǿ�ȣ�Bx1��By1��Bz1Ϊ�����NNS״̬�¿ռ�ų���x��y��z����ĴŸ�Ӧǿ�ȡ�ͬ�����ɵõ�SNN��SSN��NSS״̬�µ����Ŀռ�ų���ѧģ�͡�
3.2 �ռ�ų������о�
3.2.1 ��������
����ANSYS����ά��̬���湦�ܣ���ͨ����ȦNNS״̬Ϊ�����о�ϵͳ�ռ�ų��ֲ������潨ģ�������1��ʾ��Ϊ�˹۲�Ÿ�Ӧǿ�ȱ仯���ɣ���Ҫ������Ӧ�ڵ��Ա㶨��·����ͼ7��ʾΪ�ų����Խڵ�λ�ò���ͼ��
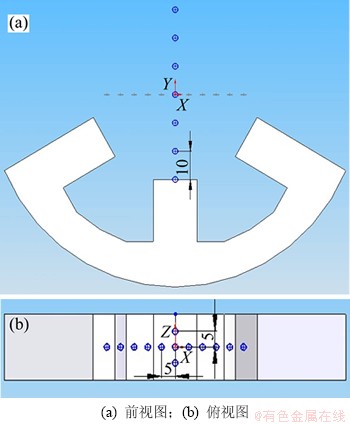
ͼ7 �ų��ų����Բ��õ�
Fig. 7 Arranged dots of magnetic field test
3.2.2 ���������
����ʽ(6)������MATLAB�е�M������д�ռ�ų�����ʽ���Ա���ʽ�б������и�ֵ����⣻ͼ8~10��ʾ�ֱ�Ϊͨ����Ȧ״̬NNS��ͨ�������·���õ��Ÿ�Ӧǿ����x��y��z����ı仯���ɽ���ֵ�����ֵ��
1) �����õ�y=30 mm��z=0 mmʱ���Ÿ�Ӧǿ����x����仯������ͼ8��ʾ����ͼ8�ɼ����ռ�Ÿ�Ӧǿ����x����ı仯������������ԭ��Ϊ���ģ����˶ԳƷֲ�����x����������ԭ������������У���������Ҵż������Ϸ�������ݲ۶����������������Ӵż�����x����Ӧλ��0 mm�������Ա�����ų��ֲ����Գƶ��������
ͼ8 �Ÿ�Ӧǿ����x����仯����
Fig. 8 Distributions of magnetic induction intensity along x direction
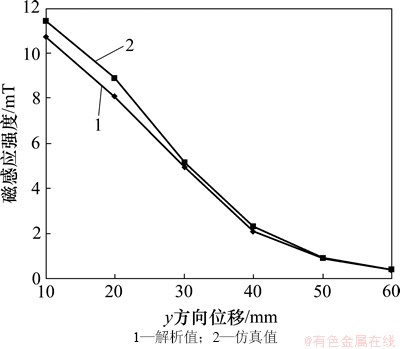
2) �����õ�x=0 mm��z=0 mmʱ���Ÿ�Ӧǿ����y����仯������ͼ9��ʾ���Ÿ�Ӧǿ�ȷ�ӳϵͳ������������ͼ9�ɼ�������y���������������϶�����Ĵ������Ÿ�Ӧǿ�Ƚ��ͣ���y�������Ϊ10~40 mm֮��ʱ���Ÿ�Ӧǿ�ȼ�С�Ͽ죬������϶����ԴŸ�Ӧǿ��˥������Ҫ���ã���40 mm�����Ÿ�Ӧǿ��ֻ��2 mT����y�������ﵽ60 mmʱ���Ÿ�Ӧǿ��ֻ��0.2 mT����ˣ�Ϊ��֤�ϴ������������ϵͳy������벻�ܴ���60 mm��
3) �����õ�x=0 mm��y=30 mmʱ���Ÿ�Ӧǿ����z����仯������ͼ10��ʾ����ͼ10�ɼ�����z���ռ�ų��Գ�������0 mm����������ԭ������������У�����Ÿ�Ӧǿ�Ⱦ����½����ƣ���������������仯Խ�Ÿ�Ӧǿ���½��ķ��ȱ�С�����ݲ۶�������Ϊ18 mm�������峤��Ϊ15 mm��Ϊ��֤���Ч�ʣ����ʹų�ǿ��˥����������������֮��z������ڷ�ΧӦ��-1.5~1.5 mm֮�䡣
ͼ9 �Ÿ�Ӧǿ����y����仯����
Fig. 9 Distributions of magnetic induction intensity along y direction
ͼ10 �Ÿ�Ӧǿ����z����仯����
Fig. 10 Distributions of magnetic induction intensity along z direction
4 ʵ��
ʵ������Ϊ�����ݲ۶��ӣ�DFl730SC5Aֱ����ѹ��Դ����Ƭ������ϵͳ�����ʷŴ��·(�����ڿռ����4��״̬�Ĵų�)��HTl00������˹���ƣ����ݲ۶���x��y��z�����������̨��ͼ11��ʾΪ���϶��������ϵͳʵ��̨��
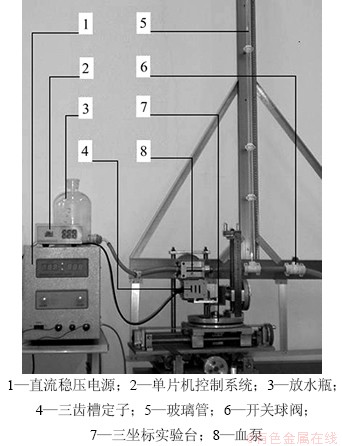
ͼ11 ����ʽѪ�ñ�ˮʵ��ϵͳ
Fig. 11 Pumping experimental system for axial flow blood pump
4.1 ������������
Ѫ������ת���ٶȵ�����ͨ���������ݲ۶��Ӵż�״̬�л�Ƶ��ʵ�ֵģ��ڱ�֤��ʧ��������£����Ӵż��л�Ƶ�ʿɷ�ӳѪ��ת��ת�٣�ͨ����Ƭ�����Ƶ�·ʵ�ֶ��Ӵż��л�Ƶ�ʵĵ��ڡ�����������ʽѪ�ý���ת��-���ʵ�飬�о���ͬ����������Ѫ���ܹ��ﵽ�����ת�١�����ͨ����¼Ѫ�����ȶ�״̬��תʱ������ʶת���Ƿ�ʧ����
4.1.1 ʵ������
�ڲ����Ǹ���������ʧ������£�����
 (7)
(7)
���Եõ�ʵ���п���������������T 0��
 (8)
(8)
ʽ�У�UΪ�����ѹ��IΪ���������nΪѪ��ת�١�
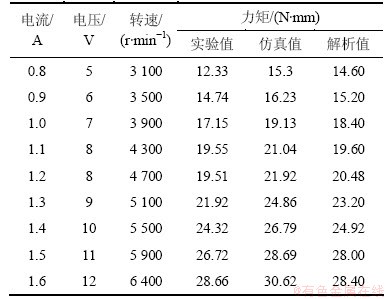
����Ͼ���y=30 mm����ͬʵ������¶�Ӧ�����ת�١��������صķ���ֵ��ʵ��ֵ������ֵ���2��ʾ��
4.1.2 �������
��ͬ�������������ؽ���ֵ������ֵ��ʵ��ֵ��ͼ12����ͼ12��֪����ͬ�������������ؽ���ֵ������ֵ��ʵ��ֵ��������һ�£���֤�˽���ģ�ͺͷ��潨ģ����ȷ�ԣ����ŵ������������������ӡ�������ʵ������У����ݲ۶��Ӵ�����ģ����Ƶ�·���ʿ��عܡ�ת����д�����ģ���ˣ���������ʵ��ֵ�ȷ���ֵ�ͽ���ֵС�������ת��6 400 r/minʱ��Ѫ����̬��ת��Լ2 h���м���ʧ�������ɱ�2��֪����6 400 r/minʱϵͳ�Ĺ���Ϊ19.2 W������[16]���ṩ������������6 200 r/minʱ�Ĺ���Ϊ73.6 W�����ĵ����ݲ۶�������Ѫ���ܴ�������ϵͳ������������������ϵͳ����ġ�
��2 �������ؼ�����
Table 2 Driving torque calculation results
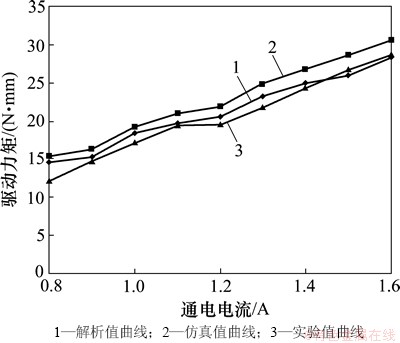
ͼ12 ��ͬ�������������ؽ���ֵ������ֵ��ʵ��ֵ
Fig. 12 Analytic, simulational and experimental values of driving torque for different currents
4.2 �ռ�ų�ʵ��
����ͼ6�дŸ�Ӧǿ�Ȳ��õ㣬����HT100������˹���ƶԲ��õ���ԴŸ�Ӧǿ�ȡ����� ����λ��̫С�������ڵ��ڣ�ʵ����ֻ������x��y����ĴŸ�Ӧǿ�ȡ�
����λ��̫С�������ڵ��ڣ�ʵ����ֻ������x��y����ĴŸ�Ӧǿ�ȡ�
4.2.1 ʵ������
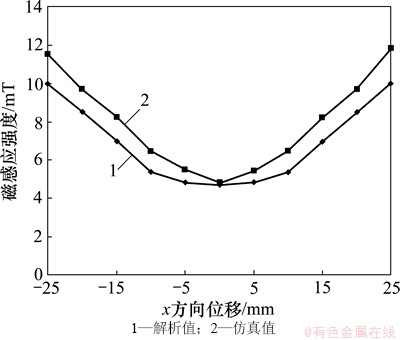
������������z=0 mm��y=30 mm��x���������-20 mm��20 mm�仯ʱ���Ÿ�Ӧǿ�ȵĽ���ֵ������ֵ��ʵ��ֵ��x����ֲ�������ͼ13��ʾ��
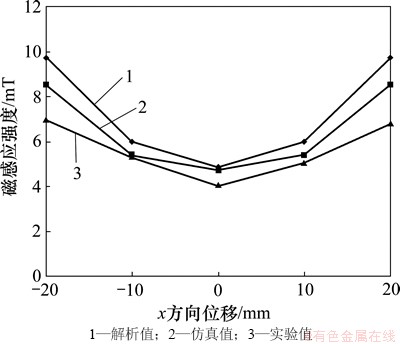
ͼ13 �����NNS״̬�´Ÿ�Ӧǿ����x����ֲ�
Fig. 13 Distributions of magnetic induction intensity along x direction under magnetic pole state NNS
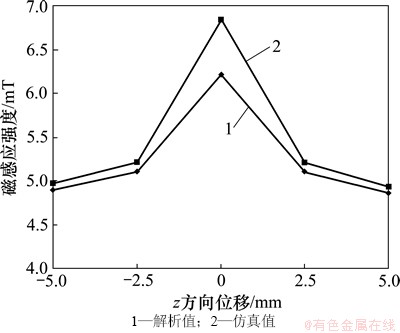
������������z=0 mm��x=0 mm��y��������� 0 mm��60 mm�仯ʱ���Ÿ�Ӧǿ�Ƚ���ֵ������ֵ��ʵ��ֵ��y����ֲ�������ͼ14��ʾ��
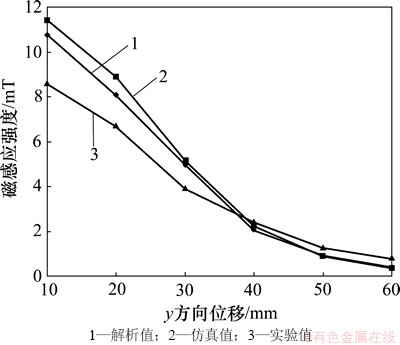
ͼ14 �����NNS״̬�´Ÿ�Ӧǿ����y����ֲ�
Fig. 14 Distributions of magnetic induction intensity along y direction under magnetic pole state NNS
4.2.2 �������
1) ��ͼ13��ͼ14��֪�������NNS״̬�´ų�ʵ��ֵ���ڷ���ֵ�ͽ���ֵ�������ߵ�����һ�£�ʵ����֤�˽���ģ�ͺͷ���ģ�͵���ȷ�ԣ�3�������غ϶Ƚϸߣ�������������ģ���Ҳ���ɱ���ش����о����Ȳ��ߵ����⡣
2) �Ÿ�Ӧǿ��ֱ�ӷ�ӳϵͳ������������Ϊʹ���϶��������ϵͳ���н�ǿ��������������Сϵͳ�����Ӵż���x����λ��0 mm����y�������С��60 mm��z�����С�1.5 mm�ɵ��ڷ�Χ��
3) �����ڽ�ģʱ�ļ����裬��ʵ�ʲ���ʱ����ȷ�����ȷ���ռ����꣬ʹ�ò�����λ���������ƫ��Ӷ�����ϵͳ�ռ�ų�ǿ���ڽ���ֵ������ֵ��ʵ��ֵ����ƫ�
5 ����
1) ��������ݲ۶��ӽṹ��������ʽѪ�õĴ��϶�������������������˶��ӳݵ�4�ִż��л�˳��
2) �����ۼ��㡢ANSYS��ֵ�����ʵ��3�����ϵͳ���������غͿռ�ų��������о�����֤��ϵͳ����ģ�ͺͷ���ģ����ȷ���õ��˵��������Ӵż���Ͼ���ֱ����������ع�ϵ��ϵͳ��x��y��z����ĴŸ�Ӧǿ�ȱ仯���ɡ�
3) ��������ͽ��ʹż�����Ͼ����ܹ����ϵͳ���������������ݲ۶��Ӵ�������ϵͳЧ����ߣ�Ѫ����ת�����ȶ���ʧ������Ϊ���ϵͳ�������������Ӵż���x����λ��0 mm����y�������С��60 mm��z�����С�1.5 mm�ɵ��ڷ�Χ��
4) ������ʵ��ֵ�����ֵ�ͷ���ֵ��������ԭ����һ�������ƽ���ģ�������ģ�ͣ��Ż����Ƶ�·�Խ�����ģ��Ż�ʵ��ϵͳ����ʵ��x��y��z����ľ�ȷ���ڡ�
�ο����ף�
[1] Hampton C, Verrier E. Systemic consequences of ventricular assist devices: alterations of coagulation, immune function, inflammation, and the neuroendocrine system[J]. Artif Organs, 2002, 26(11): 902-908.
[2] Wang Z, Yu Y. A novel rotating magnetic field generator for driving magnetic micro-machine[J]. IEEE Trans Appl Supercond, 2008, 18(2): 887-890.
[3] Zhu X Z L, Yao Z. Shape optimization of the diffuser blade of an axial blood pump by computational fluid dynamics[J]. Artif Organs, 2010, 34(3): 185-192.
[4] Cheng D O S, Olles M W. Miniaturization of a magnetically levitated axial flow blood pump[J]. Artif Organs, 2010, 34(10): 807-815.
[5] Hoshi T S H, Takatani S. Third-generation blood pumps with mechanical noncontact magnetic bearings[J]. Artif Organs, 2006, 30(5): 324-338.
[6] ף����, ̷��ƽ, ����. ���϶��������ϵͳ�����ų��IJ��������о�[J]. �������ѧ��, 2011, 18(3): 204-208.
ZHU Zhongyan, TAN Jianping, XU Yan. Generating methods of driving magnetic field for the large gap magnetic driving system[J]. Journal of Engineering Design, 2011, 18(3): 204-208.
[7] ���, ��ƽ, ������. ���������������ת�ų��Ļ�����ʵ��[J]. �������ѧ��, 2008, 15(3): 191-197.
ZHANG Wei, HUANG Ping, MENG Yonggang. Mechanism and experiment research on rotational magnetic field generated by circumferentially arrayed permanent magnets[J]. Journal of Engineering Design, 2008, 15(3): 191-197.
[8] �����, �ƽ, ��Ⱥ��. ��ų������������ڿ����ų���Ȧ����Ʒ����о�[J]. �й���ѧ������ѧѧ��, 2008, 38(3): 371-375.
LI Guoli, LI Jianping, WANG Qunjing. A method for designing exterior coils of capsule endoscope drived by magnetic field[J]. Journal of University of Science and Technology of China, 2008, 38(3): 371-375.
[9] �����, �Ĵ���, �ߵ���. ��������������Ҷ��Ѫ�õ������Ԫ�������[J]. �ص��, 2008(7): 29-35.
YIN Guiliang, XIA Chunlei, GAO Dianrong. Design of the conical spiral impeller blood pump motor driven on outside of body[J]. Small & Special Electrical Machines, 2008(7): 29-35.
[10] Pan Zheng, Yousef Haik. Force and torque characteristics for magnetically driven blood pump[J]. Journal of Magnetism and Magnetic Materials, 2002, 241(2): 292-302.
[11] TAN Wei, TAN Jianping. Electromagnetic and hydrodynamic characteristics of extracorporeal magnetic driving system for axial flow blood pump[J]. Magnetohydrodynamics, 2012, 48(3): 543-556.
[12] ̷��ƽ, ����, ������, ��. һ�ַǽӴ�ʽ���϶������������: �й�, 200810030545.1[P]. 2008-10-01.
TAN Jianpin, XU Yan, LIU Yunlong, et al. A non-contact large floating interval magnetic force driving method: China, 200810030545.1[P]. 2008-10-01.
[13] ����, ̷��ƽ, ��̷ϲ. �в��ų������Ĵ��϶��������ϵͳ�������[J]. ��е��ѧ�뼼��, 2009, 28(4): 446-449.
XU Yan, TAN Jianping, LI Tanxi. Scheme design of a large gap magnetic drive system driven by traveling wave magnetic field[J]. Mechanical Science and Technology for Aerospace Engineering, 2009, 28(4): 446-449.
[14] ����, ̷��ƽ, ������. ���϶��������ϵͳ�������صļ��㷽��[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2009, 36(7): 30-35.
XU Yan, TAN Jianping, LIU Yunlong. Calculation method of driving torque of the large gap magnetic drives system[J]. Journal of Hunan University (Natural Sciences), 2009, 36(7): 30-35.
[15] ����, ̷��ƽ, ��̷ϲ. �в��ų������Ĵ�������ϵͳ�ռ�ų���ѧģ��[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2009, 40(6): 1573-1579.
XU Yan, TAN Jianping, LI Tanxi. Space magnetic field��s mathematical model of magnetic drive system driven by traveling wave magnetic field[J]. Journal of Central South University (Science and Technology), 2009, 40(6): 1573-1579.
[16] ������, ̷��ƽ, ����, ��. ���϶��������ϵͳ��������Ч��[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2011, 42(5): 1296-1302.
LIU Yunlong, TAN Jianping, XU Yan, et al. Energy transfer efficiency of large gap magnetic drive system[J]. Journal of Central South University (Science and Technology), 2011, 42(5): 1296-1302.
(�༭ �²ӻ�)
�ո����ڣ�2014-01-20�������ڣ�2014-03-22
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51075403)����������ʿѧ�Ƶ�ר�����������Ŀ(20100162110004) (Project(51075403) supported by the National Natural Science Foundation of China; Project(20100162110004) supported by Doctoral Fund of Ministry of Education of China)
ͨ�����ߣ�̷��ƽ����ʿ����ʦ�����ڣ������ִ�����Һ�����������о���E-mail: jptan@163.com
ժҪ��Ϊ��ߴ��϶����������ϵͳ����������������Ч�ʺ��ȶ��ԣ�������ݲ۶�����������ʽѪ�õĴ��϶����������������ϵͳ���������غͿռ�ų��ֲ�������Խ����о����������ݲ۶����������غͿռ�ų�����ģ�ͣ�����MATLAB���������������ģ�ͣ���������ֵ��ANSYS��ֵ���ֵ�Աȣ�ͨ��ʵ����������غͿռ�ų�����ģ�ͺͷ���ģ�ͽ�����֤���о�����������������غͿռ�ų���ѧģ����ȷ��Ѫ�������й������ȶ���������ת������ʧ������ϵͳ����Ч����ߣ���������ͼ�С���Ӵż�����������������������Ӵż����λ����x����λ��0 mm��y�������С��60 mm��z�����ڡ�1.5 mm�ڣ������ϵͳ�������������о�Ϊ���϶�������������Ŀ������ṩ��;�������ݡ�
[6] ף����, ̷��ƽ, ����. ���϶��������ϵͳ�����ų��IJ��������о�[J]. �������ѧ��, 2011, 18(3): 204-208.
[7] ���, ��ƽ, ������. ���������������ת�ų��Ļ�����ʵ��[J]. �������ѧ��, 2008, 15(3): 191-197.
[9] �����, �Ĵ���, �ߵ���. ��������������Ҷ��Ѫ�õ������Ԫ�������[J]. �ص��, 2008(7): 29-35.
[12] ̷��ƽ, ����, ������, ��. һ�ַǽӴ�ʽ���϶������������: �й�, 200810030545.1[P]. 2008-10-01.
[13] ����, ̷��ƽ, ��̷ϲ. �в��ų������Ĵ��϶��������ϵͳ�������[J]. ��е��ѧ�뼼��, 2009, 28(4): 446-449.
[14] ����, ̷��ƽ, ������. ���϶��������ϵͳ�������صļ��㷽��[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2009, 36(7): 30-35.
