
DOI: 10.11817/j.issn.1672-7207.2017.11.016
�ǽӴ�ʽ�������̬��ⷽ��
����÷������������ս�
(���ִ�ѧ ��ͨѧԺ������ ������130022)
ժ Ҫ��
����ⷽ�����ڵ�ȱ�ݣ����һ�ֻ��������Ӿ��ķǽӴ�ʽ�������̬��ⷽ�����÷�������˫Ŀ�����Ӿ�����ԭ�����������ģ�ͣ�Ӧ���ѱ궨��������ɼ�����ͼ��������ͼ���������Գ������ͼ������������ȡ��������ά�ؽ�ģ�ͣ�Ϊ�õ�����������꣬������С���˷�����챵�50���߽�������ϣ����������ʻʱ���������߲�����ֵ���������߽���ģ�ͣ�Ӧ��Matlab��20��ƫת�Ǧ½��������֤���о����������ͨ��ʵ��ʵ�鼰3�ֲ�ͬ��ⷽ���Աȷ�������ϵͳ���пɿ����ȶ��ԣ����㳵�����Ҫ��
�ؼ��ʣ�
�ǽӴ�ʽ����̬�����˫Ŀ�����Ӿ�����ά�ؽ������߽�����
��ͼ����ţ�U472.9 ���ױ�־�룺A ���±�ţ�1672-7207(2017)11-2959-07
Dynamic detection method for non-contact vehicle wheelbase difference
SHAN Hongmei, WU Dao, ZHANG Libin, SU Jian
(School of Transportation, Jilin University, Changchun 130022��China)
Abstract: Aiming at the defects of the existing detection methods for vehicle wheelbase difference, a dynamic detection method based on the stereo vision for the non-contact vehicle wheelbase difference was proposed. The method was based on the imaging principle of binocular stereo vision and the measurement model of wheelbase difference, and applied calibrated cameras to capture wheels image and using the digital image processing technology to extract wheel hub image feature. A 3D reconstruction model was established. In order to get the center coordinates of wheel hub, 50 boundary points of the wheel hub were fitted by the least square method. Aiming at the curve compensation value generated during curve driving, a curve correction model was established and 20 deflection angle �� were fitted by Matlab. The results show that the stability of the system is verified through testing car in practice and comparative analysis of three different detection methods, which can meet the vehicle detection requirements.
Key words: non-contact; dynamic detection; binocular stereo vision; 3D reconstruction; curve correction
�����ڸ�����ʻʱ������������һ��ֵ��������ʻ���������������̥ĥ�����ء�ת��ʧ�ȡ���ƫ������ֵ����ʱ�����ᷢ���������Ӱ�������IJ����ȶ��ԣ��������İ�ȫ��ʻ������������[1]��GB/T 17993��2005�������ۺ����ܼ��վ������ͨ��Ҫ�涨���������������ΧΪ0~20 000 mm���ֱ���Ϊ1 mm[2]��������������������ʵ����Ҫ������������������ָ��, ��������˹��������׳߲�������һ�־�̬������������Ϊ���ϴ����е����ܼ�ⷽ�������ֶ�λ�ǻ��㷨�����ⷨ����̥ӡ��ѹ��ʽ�����ⷽ�������ֶ�λ�ǻ��㷨[3]ͨ�����ֶ�λ�Ǻͳ���ǰ��ֵ����ӵõ�����������ʱ�䳤�����ʺ���Ϊ������ר���豸�����ⷨ����������Խϸߣ�����ͨ�ļ��ⷢ������۸ߣ��ռ�λ�ò������ѣ��ҹ�����ɢ������棬����ʵ�������װ�õ�һһ��Ӧ��ϵ�����Ա�֤����ȶ��ԡ�����ȫ��[4]�����һ�ֵͳɱ��ļ���������������������������̻���ʱ����Խϳ������ճ�[5]������̥ӡ��ѹ��ʽ��ⷽ�����в��������ڶ���̥ͼ���Եʶ��ʱ�ܳ��ֺ����Ƶ�Ӱ�죬���Ծ�ȷ��λ�������ģ��Բ�����������ϴ������Ϊ����������֤�������ȡ�CHEN��[6]���������Ӿ����ԭ���������һ�ֻ��������Ӿ����־�̬�����ⷽ�����÷���Ϊ��̬�������������������Զ��������ܻ��Ķ�̬���Ҫ����ˣ�����һ��ȷ����Ч����ݵ����������ⷽ��������������İ�ȫ���ܾ����ش�����塣����ͼ���Ӿ�ʶ����������ͼ���������ķ�չ[7-8]���������������һ�ֶ�̬�ķǽӴ�ʽ���������ⷽ���������������Ӿ������������÷�����������ѧģ�͵Ļ����ϣ����ѱ궨��������ɼ�����ͼ����ͼ������������챱߽������ȡ����ά�����ؽ����������߽���ģ�ͣ����������������꣬�õ��������������ʵ��ʵ�������֤��
1 ˫Ŀ�����Ӿ�������ģ��
����������ָ������ֱ����ʻ״̬�£��������ǰ����ľ���E���Ҳ�ǰ����ľ���F֮��������ģ����ͼ1��ʾ��
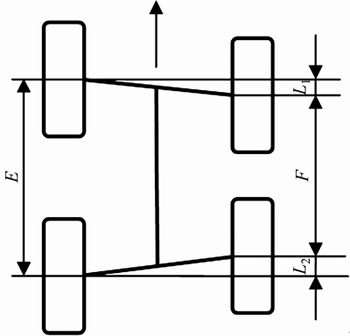
ͼ1 �������ģ��
Fig. 1 Measurement model of wheelbase difference
����������㹫ʽΪ
 (1)
(1)
ʽ�У� Ϊ�������L1Ϊǰ��L2Ϊ����
Ϊ�������L1Ϊǰ��L2Ϊ����
˫Ŀ�����Ӿ������������Ӳ�ԭ�������ó����豸�Ӳ�ͬ��λ�û�ȡ���������2��ͼ��ͨ������ͼ���Ӧ����λ��ƫ������ȡ������ά������Ϣ�ķ���[9]�������ԭ����ͼ2��ʾ��
��ͼ2��ʾ�ɼ������������������ϵ�ֱ�Ϊ ��
�� �����߾�Ϊb������Ϊf��ͬʱ�ۿ��ռ������ͬһ������P������������������������ɵĵ�ֱ�ΪP1(u1,v1)��P2(u2,v2)��������ģ��ͶӰ��X-Z��ɵ�ͼ3��ʾͶӰͼ��O1��O2�ֱ�������������������ģ�sΪ�ӵ�P��������������������ߵľ��롣
�����߾�Ϊb������Ϊf��ͬʱ�ۿ��ռ������ͬһ������P������������������������ɵĵ�ֱ�ΪP1(u1,v1)��P2(u2,v2)��������ģ��ͶӰ��X-Z��ɵ�ͼ3��ʾͶӰͼ��O1��O2�ֱ�������������������ģ�sΪ�ӵ�P��������������������ߵľ��롣

ͼ2 ˫Ŀ�����Ӿ�����ԭ��
Fig. 2 Imaging principle of binocular stereo vision
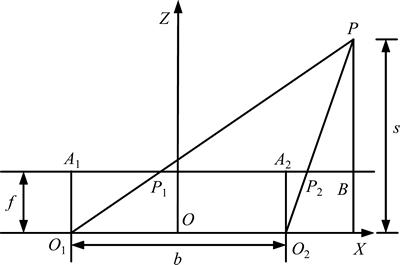
ͼ3 X-Z��ͶӰ
Fig.3 X-Z projection
��������������ԭ���ɵã�
 (2)
(2)
 (3)
(3)
����ʽ(2)��ʽ(3)�ɵ�
 (4)
(4)
ʽ�У�b��fΪ��֪������ Ϊ�ռ���һ��P������2���������е��Ӳ���ԣ�ֻҪ���2��������������Ϣ���ɵõ�ȷ��P��������Ϣ��
Ϊ�ռ���һ��P������2���������е��Ӳ���ԣ�ֻҪ���2��������������Ϣ���ɵõ�ȷ��P��������Ϣ��
2 ����ͼ��ʶ��������ƥ��
2.1 ͼ���ȡ
�궨������������ڲ��������ⲿ����[10-11]�������1��2����ij���ͼ����ͼ4��ʾ��
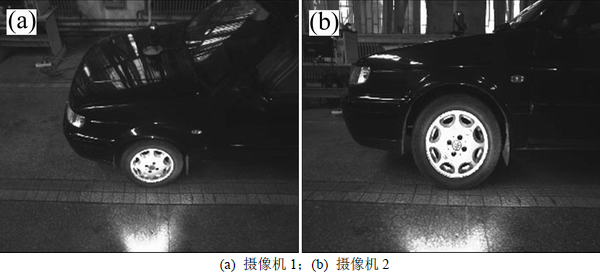
ͼ4 ��������ij��ֵ�ԭʼͼ��
Fig.4 Original images of wheel captured by camera
2.2 ͼ��ƽ������
���������������У�ͼ���������ֵ�ĸ�˹��������ɢ�Ľ���������Ӱ��[12-13]�����IJ��û��ڱ�Ե��������ֵ�˲��㷨��ͼ�����ƽ�����������ַ����Ƚ�ʡʱ�䣬�־��нϸߵľ��Ⱥ����õ�����[14]��
2.3 ͼ��ָ�
����Otsu�㷨��ͼ��ָ����һ�־���ķDz������ල����Ӧ��ֵ�ָ��㷨[15-16]�����㷨��һ�������²���ͼ��ԱȶȺ����ȱ仯��Ӱ�죬������Ӧ����ǿ��ͼ�ָ����ͼ��Ĺؼ����ָ������ԡ���Otsu�ָ���ͼ����ͼ5��ʾ��
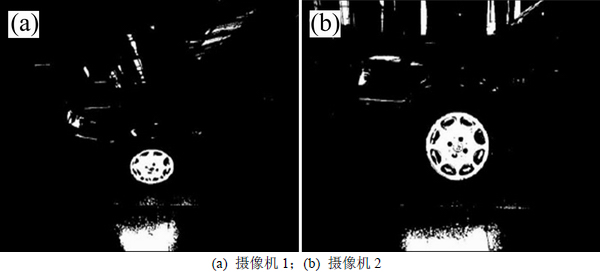
ͼ5 ��Otsu�ָ���ͼ��
Fig. 5 Otsu image after segmentation
2.4 ͼ�����
ɨ������������㷨���ԶԾ�������߽������ͨ�����ͨ���������Ч��䣬�ұ�����ȡ����[17]�����복���������ͨ�������������Ϊʵ��Բ����������챲��ֵ�ͼ����������㣬���Ч����ͼ6��ʾ��
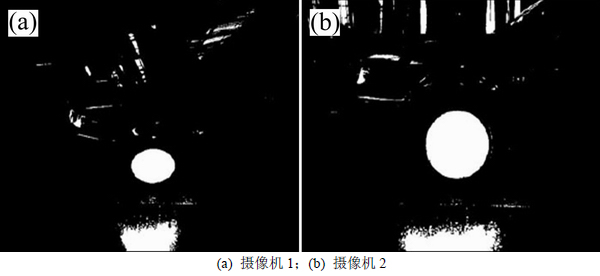
ͼ6 ������������ͼ��
Fig. 6 Hub image after region filling
2.5 ͼ��߽����
��ɨ������������㷨�������ͼ����Ȼ���ڿ��Ͱ��ӣ���ˣ���Ҫ��ͼ��߽�������������������ѧ��̬ѧȥ��ͼ��߽磬Ȼ����п����㣺 �����ṹԪ��B�ȸ�ʴԭʼͼ��A���ٽ����������㣬ȥ��ͼ��������Բ�λ���Բ�εĹ����㡣ͼ������õ���Ϊ�����ij������ͼ����ͼ7��ʾ��
�����ṹԪ��B�ȸ�ʴԭʼͼ��A���ٽ����������㣬ȥ��ͼ��������Բ�λ���Բ�εĹ����㡣ͼ������õ���Ϊ�����ij������ͼ����ͼ7��ʾ��
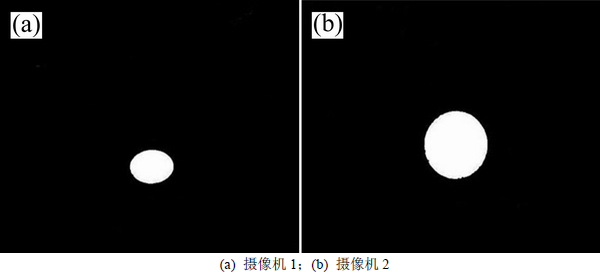
ͼ7 ȥ���߽������ͼ��
Fig. 7 Hub image after clearing image edge
2.6 ����ͼ��ƥ��
����ͼ��ƥ�䣬��2��ʵ�֣�1) ��ȡ�ʵ���ͼ��������ƥ���Ԫ��2) ��Ƴ�����ȷƥ����ѡ��Ԫ���ȶ��㷨�����IJ���Harris�ǵ���ȡ�㷨��ȡ�ǵ�[18]���õ�ÿ���б�ͼ��Ľǵ���ڼ���Լ����ϵ������Щ�ǵ�֮��ij�ʼ��ѡƥ���ϵ��Ϊ����������ƥ�侫�ȣ����ö�Ӧ�����㵽��Ӧ�����ϵĴ�ֱ�����Լ����ֵT=0.5������С��T�������㹹�ɺ�ѡ�����㼯�ϡ����û��ڻҶ���ص�����ƥ�䷽�����������ƥ�䣬ȥ���˲�����������Լ��ƥ���ͬʱ������ȵر����˲������߽��������ȷƥ�䣬�õ���ȷ��ƥ��������ԣ��Ӷ����������֮��Ķ�Ӧ��ϵ��
3 ��������������ά�ؽ�
��ά�ؽ���ָ��2�����ϵĶ�ά��ͼ�ؽ�������ά��Ϣ�ķ���[19-20]�����Ѽ������ͼ������һ��P������������ϵ�ͼ���ֱ�ΪP1��P2�㣬���ѱ궨��ͶӰ����M1��M2�£�������깫ʽΪ��
 (5)
(5)
 (6)
(6)
����P1����P2���ڸ���ͼ���е��������ֱ�Ϊ(u1,v1,1)��(u2,v2,1)��P������������ϵ�µ��������Ϊ(X,Y,Z,1)��mijΪ����Mk�ĵ�i�е�j�е�Ԫ��(k=1,2; i=1,��,3; j=1,��,4)��Zc1��Zc2�ֱ�Ϊ����������ı������ӡ��ɽ������ε������ϵ��������С���˷���������ռ��P������(X,Y,Z)��
4 ʵ��ʵ�鼰ʵ�����ݶԱȷ���
4.1 ʵ��ϵͳ����
Ϊ�˽�һ����֤���������Ӿ�������������Ҳ���ϵͳ���ԭ����ȷ�ԣ���ʱ����ʵ���д��ڵ����⣬ѡ��ʵ������ϵͳ��֤������ѡ�õij���Ϊһ�����ڽݴ��̥�ͺ�Ϊ185/60R14 82H��ʵ�鿪ʼ����������ʻ����ϵͳ��ǰ�ֵ�ס��紫����ʱ�������1��2�ɼ�����ͼ��, �����3��4�ɼ��Ҳ��ͼ��ʵ�鲼����ͼ8��ʾ��
4.2 ʵ��ϵͳӲ���ṹ���������
��ϵͳ����Matlab��Visual C++���Կ�������������Ҳ������Ӿ�����ϵͳ������SQL SERVER 2008���ݿ⡣������Ʋ���ģ�黯�ṹ������ͼ��Ԥ����ģ�顢������ȡģ�顢ϵͳ�궨ģ�顢��ά�ؽ�ģ��������������ģ�顣
Ӳ������4����ͬ�ͺŵ������(DH- HV3150UC)������CMOS��ɫ����ͼ�������ֱ���Ϊ2 048���ء�1 536���أ������֡����SXGA(1 280���ء�1 024����)״̬��Ϊ15 ֡/s��USB�ӿڣ�����IPC-810E��ҵ���Ƽ������YF-T10����ʽ��紫���������Ƶ���ά����б꣬�б�߳�Ϊ500 mm��3��ƽ�泤����Ϊ60 mm��60 mm�ĺڰ����̸�
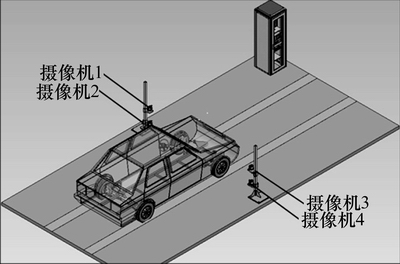
ͼ8 ʵ��ϵͳ����ͼ
Fig. 8 Layout of experimental system
4.3 ��С���˷�����������������
ͨ����������������������ͼ����д���������С���˷��Գ��ֽ�����ϡ�����в�����Ҫȷ��Բ�����еı߽�㣬ֻ��Ҫ��Բ�ϲ��ֱ߽����ж�λ�Ϳ�����ϳ���챵�Բ�ĺͰ뾶����ˣ���Բ���Ͼ��ȵ�ȡ50�������㡣
��Բ�ķ���Ϊ
 (7)
(7)
ʽ�У�(a, b)ΪԲ�����ꣻrΪ�뾶��
ȡ�в� ƽ���ͺ���Ϊ
ƽ���ͺ���Ϊ
 (8)
(8)
ʽ�У� ��ʾ����Ķ�ֵ��Եͼ���Բ�ı�Ե���صļ��ϣ�
��ʾ����Ķ�ֵ��Եͼ���Բ�ı�Ե���صļ��ϣ� ��ʾ��Ե���ص�ͼ�����ꡣ
��ʾ��Ե���ص�ͼ�����ꡣ
�ɼ�ֵԭ����
 (9)
(9)
�� ��
�� �ֱ��ʾx��y������ֵ����������õ�
�ֱ��ʾx��y������ֵ����������õ�
 (10)
(10)
�������������ʽ(10)�����������ά���꣬Ȼ�������50�����X��Y��Z�����ƽ��ֵ���õ�����������ꡣ���Ҳ������3��4����Ľݴ�γ���ǰ�ֵĵ�һ������Ϊ��������õ�һ�������������ά�������ݣ����1��ʾ��
��1 �ݴ�γ���ǰ�����������ά�����ؽ���������
Table 1 Calculation of 3D coordinate reconstruction for center of Jetta��s right front wheel hub

��ˣ���ýݴ�γ���ǰ�������������Ϊ(229.8��108.3��276.7)��
�ݴ�γ�ǰ�����������ά�ؽ�ģ����ͼ9��ʾ��������������������������������a��ֵ��ͬ�������b��ֵ������ʽ(1)�ɵ��������
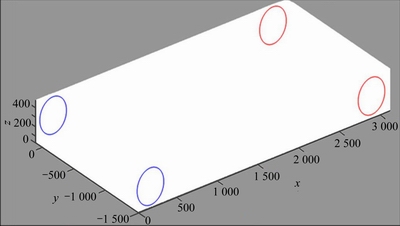
ͼ9 �ݴ�γ�ǰ���������ά�ؽ�ģ��
Fig. 9 3D reconstruction model of Jetta��s front and rear hub
4.4 ���߽���
����������ʻʱ������ʵ�ʵ������������֮��IJ�ֵΪ���߲�����ֵ���ɱ�ʾΪ
 (11)
(11)
ʽ�У�dΪ���߲�����ֵ�� Ϊ������ʻʱ����ֵ��
Ϊ������ʻʱ����ֵ�� Ϊ����ʵ������ֵ��
Ϊ����ʵ������ֵ��
������ǰ����ʻ�켣Ϊ��������������ʻʱ�IJ�����ֵ����ͼ10��ʾ��
ͼ10�У�lΪǰ���־࣬ Ϊƫת�ǣ�MNΪ����ֱ����ʻʱ��λ�ã�
Ϊƫת�ǣ�MNΪ����ֱ����ʻʱ��λ�ã� Ϊ����������ʻʱ��λ�ã�����
Ϊ����������ʻʱ��λ�ã�����
 (12)
(12)
��ƫ��ֵΪh������Ͷ���ǵ�ľ��֮��ľ���ΪL�����ı���ʽΪ
 (13)
(13)
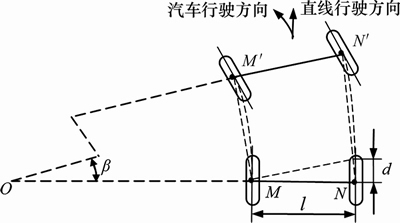
ͼ10 ����������ʻʱǰ����ʻ�켣
Fig. 10 Driving track of front wheel when vehicle is curve driving
����ǰ��ͨ�������������ʱ���õ�һ��ƫ��ֵ���Դ�Ϊ��㣬�����õ�20��ƫ��ֵ����Ӧ�õ�20������Matlab��20��������ϣ���ͼ11��ʾ��20�������Ա仯���Һͷ���Ϊ0.007 206���ɴ˿ɼ�����ģ�͵���϶Ƚϸߡ�
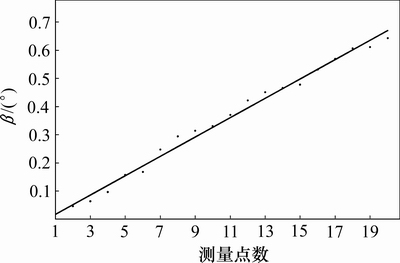
ͼ11 �ݴ�γ��õ�20�����Ӧ�µ��������
Fig.11 Curve fitting of Jetta obtained by 20 points corresponding to ��
4.5 ��ͬ�����ⷽ���Աȷ���
Ϊ����֤�����Ӿ����ϵͳ�ľ�ȷ�Ժ��ȶ��ԣ������׳��뿨�߶Խݴ�γ���������о�ȷ��������ֵΪ3.0 mm��������Ϊ�˲���ֵΪ�����ݡ�����ʵ�ʳ��õļ��ⷨ�����ֶ�λ�ǻ��㷨���в������ݵĶԱȷ������ֱ��ظ�����20�β���ʵ�飬ʵ���������2��ʾ��
��2 3�ּ��ϵͳ��õ���������
Table 2 Wheelbase difference of automobile measured by three kinds of detection system mm
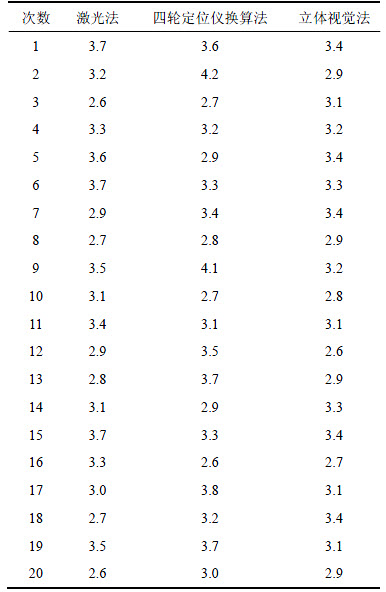
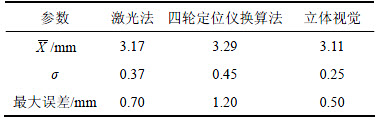
�ɱ�3���Կ�����3�ַ�����ƽ������ֵ���ӽ���ֵ�������Ӿ�����ƽ��ֵΪ3.11 mm�����ӽ���ֵ�������Ӿ�����������ı���Ϊ0.25�������ڼ��ⷨ�����ֶ�λ�ǻ��㷨�ı�����ֶ�λ�ǻ��㷨�����������1 mm��������
�о�������������ⷨ����ֵ��Ϊ��ȷ���������ϴ��ȶ��Խϲһ����ԣ����ⷨ�IJ������ȸ���ͼ��������ľ��ȣ����ڲ������ȴﵽ1 mmʱ������������ʱ���ϵIJ���Ϊ6.67��10-12 s��Ҫ�����ֵ�·���������ʱ��Ƶ������Ҫ�ﵽ100 GHz����Ŀǰ���������º���ʵ�֡���ˣ���ʵ��װ�õ����ƣ�������������ȶ��Խ������Ӿ��Բ���ֶ�λ�ǻ��㷨������ֵ�Ǽ�ӻ���õ��ģ����ڽϴ��ϵͳ���ͼ�������ˣ�������������ȶ��Ծ�������2�ַ�����ɴ˿ɼ����������ü��ϵͳ�ļ�⾫�Ⱦ�������2�ַ����ĸߣ��ȶ���ǿ��
��3 10�β������������ƽ��ֵ������
Table 3 Arithmetic means and standard deviations of 10 times measurement results
4.6 ������
������Ҫ��Դ�У�ʵ�����õĻ�еװ���ܼӹ����Ⱥ��¶ȵ�Ӱ�������ϵͳ����ͼ���������У����ݼ����������ͼ��ƥ���㷨���������ؼ�������Ӱ�죬�㷨�������Ų������������������������ά�ؽ�ģ�Ͳ�������������С������������������ѡȡ�����������������ʻʱ�����߽���ģ�ʹ��ڵ�������
5 ����
1) ���������Ӿ����ԭ���������һ�ֻ��������Ӿ��ķǽӴ�ʽ���̬��ⷽ����
2) ��������ͼ��������ʶ�����ͼ������������������ά�ؽ������㳵������������꣬���������߽���ģ�Ͳ���������֤��
3) ��ģ����ȷ��������ȶ��Ժã����㳵���ۺ����ܼ���Ҫ���кܺõ�ʵ���Ժ��ƹ��ԡ�
�ο����ף�
[1] �Ź�ǿ. �ƶ�ʽ�����������ǵ�����о�[D]. ����: ������ѧ��е�������Զ���ѧԺ, 2006: 1-4.
ZHANG Guoqiang. Automobile wheelbase��s difference of automobile instrument design research[D]. Shenyang: Northeastern University. School of Mechanical Engineering and Automation, 2006: 1-4.
[2] GB/T 17993��2005, �����ۺ����ܼ��վ������ͨ��Ҫ��[S].
GB/T 17993��2005, General requirements for the competence of automotive multiple-function test station[S].
[3] ���. �������ֶ�λ�Ǽ춨������װ�õ��о�[D]. ����: ���ִ�ѧ��ͨѧԺ, 2006: 3-5, 83-84.
XU Guan. Study on the calibrating method and apparatus of four-wheel aligners[D]. Changchun: Jilin University. School of Transportation, 2006: 3-5, 83-84.
[4] ����ȫ, ͯ��, �ε³�, ��. ���������������������е�Ӧ��[J]. �����Զ���, 2007, 29(3): 56-57.
JIA Shengquan, TONG Fei, SONG Dechao, et al. Appliance of laser measurement in measuring the vehicle wheelbase[J]. electrical automation, 2007, 29(3): 56-57.
[5] ���ճ�. ��̥ӡ��ѹ��ʽ���������ⷽ�����о�[D]. ����: ���ִ�ѧ��ͨѧԺ, 2009: 5-17.
LIU Suchao. Research on the piezoelectric detection method of the vehicle wheelbase based on tires western[D]. Changchun: Jilin University. School of Transportation, 2009: 5-17.
[6] CHEN Xu, LIN Guoyu. Research on wheelbase, wheelbase difference, and wheel static radius detection based on stereo vision[J]. Journal of Theoretical and Applied Information Technology, 2013, 49(3): 943-950.
[7] LI Wenhui. Study on the technology of digital image processing[J]. Applied Mechanics & Materials, 2014, 687/688/689/690/691: 3555-3558.
[8] MA Bin, BIAN Shuhai, HUANG Kuan, et al. A study and analysis of digital image processing and recognition algorithms[J]. International Journal of Computer Applications in Technology, 2014, 49(1): 42-49.
[9] ����, ����. ����ƽ��˫Ŀ�����Ӿ��IJ��ϵͳ[J]. �����Ӧ��, 2012, 32(z2): 162-164.
LIU Pan, WANG Jinhai. Distance measurement system based on parallel binocular stereo vision[J]. Journal of Computer Applications, 2012, 32(z2): 162-164.
[10] �Ž�, ���µ�, ������. ��������б��������궨����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2011, 41(3): 543-548.
ZHANG Jie, LI Xinde, DAI Xianzhong. Camera calibration method based on 3D board[J]. Journal of Southeast University (Natural Science Edition), 2011, 41(3): 543-548.
[11] JIA Zhenyuan, YANG Jinghao, LIU Wei, et al. Improved camera calibration method based on perpendicularity compensation for binocular stereo vision measurement system[J]. Optics Express, 2015, 23(12): 15205-15223.
[12] �ﺣӢ. ͼ���˹��������������ȥ���㷨�о�[D]. �Ϻ�: ������ѧ��Ϣ��ѧ�빤��ѧԺ, 2012: 7-45.
SU Haiying. Research on image denoising based on Gauss Noise and salt and pepper noise[D]. Shanghai: Fudan University. School of Information Science and Technology, 2012: 7-45.
[13] ������, ������. ����matlab�Ľ�������ͼ��ȥ�뷽���о�[J]. ���Ӳ���, 2014(6): 27-28.
BAI Zongwen, ZHOU Meili. Research on the denoise method of Salt and pepper-noise image based on matlab[J]. Electronic Test, 2014(6): 27-28.
[14] ��ݷ, ����. ���ڱ�Ե��������ֵ�˲��㷨�ĸĽ�[J]. �й��Ƽ���Ϣ, 2015(7): 110-111.
LIU Shen, WANG Fei. Improvement of the median filtering algorithm based on edge protection[J]. China Science and Technology Information, 2015(7): 110-111.
[15] XU Xiangyang, XU Shengzhou, JIN Lianghai, et al. Characteristic analysis of Otsu threshold and its applications[J]. Pattern Recognition Letters, 2011, 32(7): 956-961.
[16] DONG Yanxue. An improved Otsu image segmentation algorithm[J]. Advanced Materials Research, 2014, 989/990/ 991/992/993/994: 3751-3754.
[17] WANG Tingmei, CHEN Ge, GUAN Hui. An improved filling algorithm for image with complicated closed edges[J]. Applied Mechanics & Materials, 2010, 20/21/22/23: 894-987.
[18] ������, ����, ���. ����˫Ŀ�Ӿ�����ά�ؽ�����������ȡ��ƥ���㷨���о�[J]. ��ѧ����, 2008, 34(2): 181-185.
ZHANG Wenming, LIU Bin, LI Haibin. Characteristic point extracts and the match algorithm based on the binocular vision in three dimensional reconstruction[J]. Optical Technique, 2008, 34(2): 181-185.
[19] ���, ��Ρ, ����, ��. ˫Ŀ�����Ӿ�����ϵͳ�ı궨[J]. ��ѧ���ܹ���, 2016, 24(2): 300-308.
YANG Jinghao, LIU Wei, LIU Yang, et al. Calibration of binocular vision measurement system [J]. Optics and Precision Engineering, 2016, 24(2): 300-308.
[20] ZHANG Jin, ZHANG Peng, DENG Huaxia, et al. High-accuracy three-dimensional reconstruction of vibration based on stereo vision[J]. Optical Engineering, 2016, 55(9): 091410.
(�༭ ����ΰ)
�ո����ڣ�2016-12-22�������ڣ�2017-03-21
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51205164)������ʡ�Ƽ���չ�ƻ���Ŀ(20150204025GX) (Project(51205164) supported by the National Natural Science Foundation of China; Project(20150204025GX) supported by the Science and Technology Development Program of Jilin Province)
ͨ�����ߣ�������ʿ�����ڣ���ʿ����ʦ�����³������ܻ����������о���E-mail:zlb@jlu.edu.cn
ժҪ������������������ⷽ�����ڵ�ȱ�ݣ����һ�ֻ��������Ӿ��ķǽӴ�ʽ�������̬��ⷽ�����÷�������˫Ŀ�����Ӿ�����ԭ�����������ģ�ͣ�Ӧ���ѱ궨��������ɼ�����ͼ��������ͼ���������Գ������ͼ������������ȡ��������ά�ؽ�ģ�ͣ�Ϊ�õ�����������꣬������С���˷�����챵�50���߽�������ϣ����������ʻʱ���������߲�����ֵ���������߽���ģ�ͣ�Ӧ��Matlab��20��ƫת�Ǧ½��������֤���о����������ͨ��ʵ��ʵ�鼰3�ֲ�ͬ��ⷽ���Աȷ�������ϵͳ���пɿ����ȶ��ԣ����㳵�����Ҫ��
[1] �Ź�ǿ. �ƶ�ʽ�����������ǵ�����о�[D]. ����: ������ѧ��е�������Զ���ѧԺ, 2006: 1-4.
[2] GB/T 17993��2005, �����ۺ����ܼ��վ������ͨ��Ҫ��[S].
[3] ���. �������ֶ�λ�Ǽ춨������װ�õ��о�[D]. ����: ���ִ�ѧ��ͨѧԺ, 2006: 3-5, 83-84.
[4] ����ȫ, ͯ��, �ε³�, ��. ���������������������е�Ӧ��[J]. �����Զ���, 2007, 29(3): 56-57.
[5] ���ճ�. ��̥ӡ��ѹ��ʽ���������ⷽ�����о�[D]. ����: ���ִ�ѧ��ͨѧԺ, 2009: 5-17.
[9] ����, ����. ����ƽ��˫Ŀ�����Ӿ��IJ��ϵͳ[J]. �����Ӧ��, 2012, 32(z2): 162-164.
[10] �Ž�, ���µ�, ������. ��������б��������궨����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2011, 41(3): 543-548.
[12] �ﺣӢ. ͼ���˹��������������ȥ���㷨�о�[D]. �Ϻ�: ������ѧ��Ϣ��ѧ�빤��ѧԺ, 2012: 7-45.
[13] ������, ������. ����matlab�Ľ�������ͼ��ȥ�뷽���о�[J]. ���Ӳ���, 2014(6): 27-28.
[14] ��ݷ, ����. ���ڱ�Ե��������ֵ�˲��㷨�ĸĽ�[J]. �й��Ƽ���Ϣ, 2015(7): 110-111.
[18] ������, ����, ���. ����˫Ŀ�Ӿ�����ά�ؽ�����������ȡ��ƥ���㷨���о�[J]. ��ѧ����, 2008, 34(2): 181-185.
[19] ���, ��Ρ, ����, ��. ˫Ŀ�����Ӿ�����ϵͳ�ı궨[J]. ��ѧ���ܹ���, 2016, 24(2): 300-308.
