
����ģ̬�������첽���������
��־��
(�������Ƽ�ѧԺ ����ѵ�������ʵ�����ģ������� ��������150027)
ժ Ҫ��
�̵�ת����Ӱ���ŵ���������ܡ�Ϊ���������ܣ������ྦྷբ���������첽���Ϊ�о�����ͨ����ѧģ�ͼ͵�·�����ö��ӵ�ѹ�����ӵ����Ľ�������ʽ���������������ߺ͵���Ƶ�ס����ݲ�ͬ�������ζ��������е�2��ģ̬���������2��ģ̬��������̷ֶΣ��ڲ�ͬ��ʩ�Բ�ͬ�����ɣ��Ӷ�ʵ������ת����˼�롣Ϊ��֤��һ˼�룬���п���ϵͳ�����ʵ�飬��������˵�������ת����ֵ���������ƣ�ʵ�ʵ������α���������ֵҲ������С��˵�����ַ�������Ч�ԡ�
�ؼ��ʣ�
��ͼ����ţ�TG111.3 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0261-06
Asynchronous machines�� soft start based on modal analysis
PI Zhi-gang
(Heilongjiang Institute of Science and Technology, Engineering Training and Fundamental Experiment Center,
Harbin 150027, China)
Abstract: The output torque vibration of asynchronous machines during the course of start influences the performances of machines��s start. In order to improve the performances, objected to three-phase thyristor driven asynchronous machines, the analytic expressions of stator voltage and current, simulation curves and current harmonics spectrum are acquired by means of mathematics model��s simplification and electrical circuit calculations. Two modes are defined by different current waveforms. The idea is provided that different stages are divided according the two modes, and changeable control principles are applied for various stages to realize torque vibrations decline. Control system simulation and experiment are employed to verify such idea. Simulation curves illustrate the amplitude of torque has been clearly depressed, and actual current waveforms explain current amplitude decrease, the results of which show that such method is effective.
Key words: asynchronous machines; modal analysis; soft start
�첽���������������ת�ٺ�ת�ز�û�о�ȷ������Ҫ������һ�����У��������ת������Լ��Դ�ͱ�����Ե����ij������Ҫ��������⡣�첽�����������һ��������Ҫ��[1-2]��(1) ����������ܱ����ơ�(2) ��װ�üɿ���(3) �������ת��������С��(4) �����еĵ�����������Ĺ������ҪС�������첽��������Ľṹ���ر��Ƕ��ڴ����������˵��ֱ�����п�����ɶԵ��������Σ���ͶԵ����ij���������Ҫ���С�����������������������ȡ������ʽ�е�ѹб��������ѹ˫б������������������ͻ��ת������ת�ؿ������ȷ�ʽ[3-4]����Щ����ʽ���ձ���ڵ���ת����û��ͳһ�Ľ����������ͨ���ڲ�ͬ�������������ߵ��ԣ������ѵĿ�����������ʵ�֡�ת�����ǵ�����ֵ��������ɵģ����Ƶ�����ֵ��������Ч����ת�������������ܣ�Ȼ�������ķ���������Ϊ���Ʋ��Ե�ѡȡ�������Ѷȡ��������������ྦྷբ����������ʽ�첽���ϵͳΪ�о���������һϵͳ����ѧģ�ͣ�ͨ���Լ�ģ�͵ĵ�·�������˵���������еĶ��ӵ�ѹ�Ͷ��ӵ����Ľ�������ʽ���������ߺ�Ƶ������������˻�е�������л���ģ̬�����ķ��������ݵ������ζ�����2��ģ̬����������ת�ص��������ڵ���˳�ξ�����ͬƵ��ģ̬�Ľ�����ڵ�������ģ̬Ƶ�����ı��ǰ���£�����ת���ĸ��������ڿ��Ƶ���ڲ�ͬģ̬�ij���ʱ�䡣�Դ�˼���ڲ�ͬ��ģ̬�����ڣ��ֱ�����˿�������������ϵͳ�����ʵ���о�������ϵͳ�������ߺ�ʵ�鲨�α������ַ����ܹ���Ч�����Ƶ�������ķ�ֵ���Ӷ�����ת����
1 �첽���������ѧģ��
1.1 ��ѧģ�͵ļ�
���첽���Ϊ���������������ӣ���բ�����������첽����ĵ�Ч��·��ͼ1(a)��ʾ��ͼ1(a)��ur��us��ut�ֱ�Ϊ��Դ��ѹ��uaoc��uboc��ucoc�ֱ�Ϊ�������ĵ�Ч��·��ѹ[5]������Thevenin������ͼ1(a)�е�����һ����Լ�Ϊ��ͼ1(b)�ĵ�·��ʽ��
ͼ1�У�������Ϊ��բ�ܴ�����![]() ��������ͨ��
��������ͨ��![]() ���ضϽ�
���ضϽ�![]() ����������
����������![]() �������ϵ(1)��
�������ϵ(1)��
![]() (1)
(1)
����ͼ1�ĵ�·���õ���ʽ(2)��(3)��ʾ�ķ��̣�
 (2)
(2)
![]() (3)
(3)
����������ַ��̣��õ���ʽ(4)��(5)��ʾ�Ķ��ӵ����Ͷ��ӵ�ѹ�Ľ���ʽ��

![]() (4)
(4)
![]()
![]() (5)
(5)
ʽ�У�LΪ��Ч��У�RlΪ��Ч���裻UiΪ��Դ��ѹ��Чֵ��i1Ϊ���ӵ�����ZΪ��Ч�迹![]() ��UoΪ���ӵ�ѹ��Чֵ��
��UoΪ���ӵ�ѹ��Чֵ��
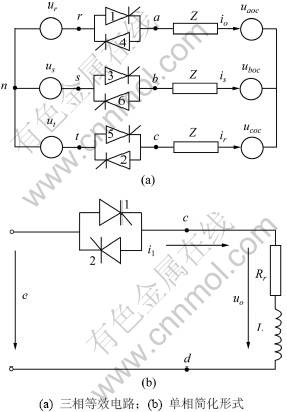
ͼ1 ���ྦྷբ�������첽�������ѧģ��
Fig.1 Mathematical model of three phase thyristor driven asynchronous machines
1.2 �����ģ̬����
��ʽ(4)��(5)���Կ������������У�����Ķ��ӵ����Ͷ��ӵ�ѹ�ǿ�����![]() ����Ʋ����õķ����Ժ�����
����Ʋ����õķ����Ժ�����![]() �ͦõı仯���������˵�������еĿ��Ʋ��Եı仯���������˶��ӵ�ѹ�Ͷ��ӵ����ı仯����˿��Ը���
�ͦõı仯���������˵�������еĿ��Ʋ��Եı仯���������˶��ӵ�ѹ�Ͷ��ӵ����ı仯����˿��Ը���![]() ��������IJ�ͬ���䶨������ ģ̬��
��������IJ�ͬ���䶨������ ģ̬��
�ڵ���ij��ڣ����������������ضϽǽϴ� ����ʽ(4)�õ�![]() �����ྦྷբ������2�ࡪ0�ཻ�浼ͨ�ĽΣ���Ϊ2/0ģ̬����
�����ྦྷբ������2�ࡪ0�ཻ�浼ͨ�ĽΣ���Ϊ2/0ģ̬����![]() =120�㣬��=65.3��Ϊ������ʱ�Ķ��ӵ�ѹ�Ͷ��ӵ�����һ�����������ڵķ���������ͼ2��ʾ����ѹ�͵�����Ƶ��������ͼ3��ʾ�����е�Դ��ѹ����ЧֵΪ220 V�������迹Z=9.4 ������ԴƵ��Ϊ50 Hz��
=120�㣬��=65.3��Ϊ������ʱ�Ķ��ӵ�ѹ�Ͷ��ӵ�����һ�����������ڵķ���������ͼ2��ʾ����ѹ�͵�����Ƶ��������ͼ3��ʾ�����е�Դ��ѹ����ЧֵΪ220 V�������迹Z=9.4 ������ԴƵ��Ϊ50 Hz��
�ڵ���ĺ��ڣ�����������������������������Ҳ����ɣ��ضϽDZ�С������ʽ(4)�õ�![]() �����ྦྷբ���������ࡪ���ཻ�浼ͨ�ĽΣ���Ϊ3/2ģ̬����
�����ྦྷբ���������ࡪ���ཻ�浼ͨ�ĽΣ���Ϊ3/2ģ̬����![]() =100�㣬��=29.6��Ϊ������ʱ�Ķ��ӵ�ѹ�Ͷ��ӵ�����һ�����������ڵķ���������ͼ4��ʾ����ѹ�͵�����Ƶ��������ͼ5��ʾ�����е�Դ��ѹ�������迹�͵�ԴƵ��ͬ�ϡ���ͼ2��4���Կ������ڵ�������йضϽ������ֵ��С��0��������ξ���2/0��3/2ģ̬�������ɲ�����������������ͼ3��ͼ5˵����(1) ���۵����������ģ̬����ѹ�͵���г�����иߴ�г����(2) ��ѹ�͵�����1��г����ֵʼ�����(3) ת������Ҫ�ɵ����2/0ģ̬�µ����ĸߴ�г������������2��ģ̬�Dz��ô����ǿ��Ʒ�ʽ���еģ���ˣ����Ƶ���ڲ�ͬģ̬����ʱ��Ϳ���ʵ�ֶ�ת�������ơ�
=100�㣬��=29.6��Ϊ������ʱ�Ķ��ӵ�ѹ�Ͷ��ӵ�����һ�����������ڵķ���������ͼ4��ʾ����ѹ�͵�����Ƶ��������ͼ5��ʾ�����е�Դ��ѹ�������迹�͵�ԴƵ��ͬ�ϡ���ͼ2��4���Կ������ڵ�������йضϽ������ֵ��С��0��������ξ���2/0��3/2ģ̬�������ɲ�����������������ͼ3��ͼ5˵����(1) ���۵����������ģ̬����ѹ�͵���г�����иߴ�г����(2) ��ѹ�͵�����1��г����ֵʼ�����(3) ת������Ҫ�ɵ����2/0ģ̬�µ����ĸߴ�г������������2��ģ̬�Dz��ô����ǿ��Ʒ�ʽ���еģ���ˣ����Ƶ���ڲ�ͬģ̬����ʱ��Ϳ���ʵ�ֶ�ת�������ơ�

ͼ2 ���2/0ģ̬��������
Fig.2 Simulation curves of motor in 2/0 mode
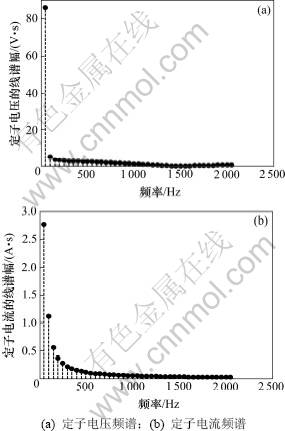
ͼ3 2/0ģ̬���Ƶ��������
Fig.3 Frequency spectrum simulation curves in 2/0 mode
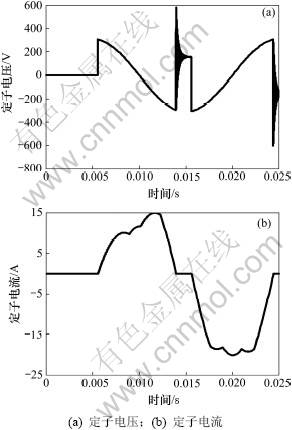
ͼ4 ���3/2ģ̬��������
Fig.4 Simulation curves of motor in 3/2 mode
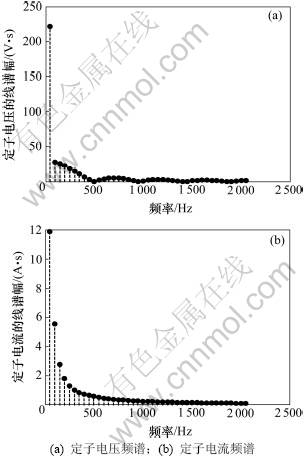
ͼ5 3/2ģ̬���Ƶ��������
Fig.5 Frequency spectrum simulation curves in 3/2 mode
2 ����ģ̬�����ķֶο��Ʋ���
2.1 �ֶεĿ��Ʋ���
����1.2�ڵķ������������������2/0ģ̬�£�г���ɷֽ϶࣬ת������3/2ģ̬�£�г���ɷ��٣�ת����С���ɴ���Ʋ�ͬģ̬���䴥���ǵݼ������㷨������ʽ��ʾ��
![]() (6)
(6)
ʽ�У����Ʊ���Ϊ��բ�ܵĴ�����![]() �����õݼ������ǵĿ����㷨����2/0ģ̬�£���ÿ������������(��Ƶ����Ϊ20 ms)���Ӵ����ǵı仯����ʹ�����ͨ��������䣬����������ת������3/2ģ̬�£���ÿ�����������ڣ���С�����ǵı仯������֤�������ȶ���ת�ķ�����e�Ӷ�ʹ����������������
�����õݼ������ǵĿ����㷨����2/0ģ̬�£���ÿ������������(��Ƶ����Ϊ20 ms)���Ӵ����ǵı仯����ʹ�����ͨ��������䣬����������ת������3/2ģ̬�£���ÿ�����������ڣ���С�����ǵı仯������֤�������ȶ���ת�ķ�����e�Ӷ�ʹ����������������![]() ��
��![]() ��
��![]() ��ѡ���������������
��ѡ���������������
2.2 ���Ʋ��Ե���֤
��������ʽ�첽�����d-q����ͬ����ת����ϵ�µ�ģ������֤��һ���Ʋ��ԣ�
 (7)
(7)
����ת�Ӵų������ת���˶�������er�͵��ת�طֱ���ʽ(8)��ʽ(9)��ʾ��
![]()
![]() (8)
(8)
![]() (9)
(9)
���У�uds��uqs�ֱ�Ϊ����dq���ѹ������ids��iqs�ֱ�Ϊ���ӵ���dq���ѹ��������ds�ͦ�qs�ֱ�Ϊdq�ᶨ�Ӵ�����������dr�ͦ�qr�ֱ�Ϊdq��ת�Ӵ���������![]() ��
��![]() �ֱ�Ϊ��ת�ӵ��裻Ls��
�ֱ�Ϊ��ת�ӵ��裻Ls��![]() ��Lm�ֱ�Ϊ��ת�Ӻͼ��ŵ�У���sΪת��Ƶ�ʣ�n pΪ��������TeΪ���ת�ء���ͼ(6)�У����÷ֶο��Ʋ�������£�2/0ģ̬�ij���ʱ��Ϊ[0 s, 1 s]��3/2ģ̬�ij���ʱ��Ϊ [1 s, 2 s]�����Կ������ڳ���ʱ�䡢�ı䴥����
��Lm�ֱ�Ϊ��ת�Ӻͼ��ŵ�У���sΪת��Ƶ�ʣ�n pΪ��������TeΪ���ת�ء���ͼ(6)�У����÷ֶο��Ʋ�������£�2/0ģ̬�ij���ʱ��Ϊ[0 s, 1 s]��3/2ģ̬�ij���ʱ��Ϊ [1 s, 2 s]�����Կ������ڳ���ʱ�䡢�ı䴥����![]() �������ܹ���Ч�ظı����ɡ���ͼ6���Կ�������������˷ֶο����ɣ��ڿ��ƴ������л���˲�� (0.8 s)�����ӵ�ѹ�͵����ķ�ֵ��Ϊ���ء�Ϊ�˱�����һ�����������ʵ���У��������л��Ĵ����ǿ���ģʽ�������������ǵݼ�ϵ������������Ŀ�ļ�����Ч���Ʋ�ͬģ̬�ڵ����ֿɱ�֤ϵͳ�ȶ���
�������ܹ���Ч�ظı����ɡ���ͼ6���Կ�������������˷ֶο����ɣ��ڿ��ƴ������л���˲�� (0.8 s)�����ӵ�ѹ�͵����ķ�ֵ��Ϊ���ء�Ϊ�˱�����һ�����������ʵ���У��������л��Ĵ����ǿ���ģʽ�������������ǵݼ�ϵ������������Ŀ�ļ�����Ч���Ʋ�ͬģ̬�ڵ����ֿɱ�֤ϵͳ�ȶ���

ͼ6 �ֶο��Ʋ�����֤
Fig.6 Validation of staged control strategies
3 ����ϵͳ�����ʵ����
3.1 ����ϵͳ����
��ʽ(7)���˶����̻�Ϊʽ(10)��ʾ��ϵͳ״̬���̣�
 (10)
(10)
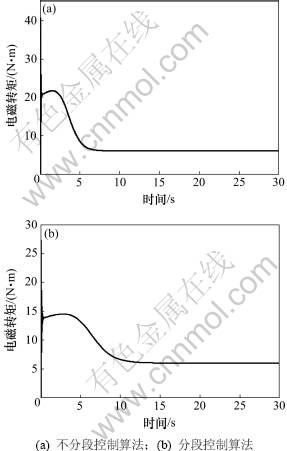
�����У��ֱ���ò��ֶεĿ����㷨�ͷֶεĿ����㷨�����п�����![]() ��������ʱ��Ϊ30 s��2/0ģʽ�ij���ʱ��Ϊ1 s��d-q���ѹΪ�220 V������ת��Ϊ6 N��mʱ������������ͼ7��ʾ��
��������ʱ��Ϊ30 s��2/0ģʽ�ij���ʱ��Ϊ1 s��d-q���ѹΪ�220 V������ת��Ϊ6 N��mʱ������������ͼ7��ʾ��
�Ա����߿���ֱ�ۿ�����2�ֿ��Ʒ�������ʹϵͳ�ﵽ�ȶ���ͼ7(a)�п����㷨Ϊ���ֶΣ����Կ���˲���ת����Ϊ���ҡ�ͼ7(b)�п����㷨�ֶΣ����Կ������ֿ��Ʒ�����Ч��������ת�ص��ת�ص���������ת����������ʱ�����ô����㷨ͬ���ܹ�ʵ��ת�������ƣ�ֻ��Ч����Ϊһ�㡣
3.2 ʵ����
���ݷ�����������ʵ����֤�������ͼ8��ʾ�������迹Ϊ3 ����������Ϊ60�㣼![]() ��130�㣬3/2ģʽ�ij���ʱ��Ϊ1 s��2/0ģʽ�ij���ʱ��Ϊ2 s��ʾ������դ��Ϊ2 V/div�����Կ�����������3/2ģʽ����2/0ģʽ�������εķ�ֵ����С��������������
��130�㣬3/2ģʽ�ij���ʱ��Ϊ1 s��2/0ģʽ�ij���ʱ��Ϊ2 s��ʾ������դ��Ϊ2 V/div�����Կ�����������3/2ģʽ����2/0ģʽ�������εķ�ֵ����С��������������
ͼ7 ����ϵͳ��������
Fig.7 Control system simulation curves

ͼ8 ʵ���������
Fig.8 Experiment current waveforms
4 ����
����첽�������������ת��������������о���ͨ����ѧģ�͵ļ���·������ֶεõ��˶��ӵ�ѹ�Ͷ��ӵ����Ľ�������ʽ�������ݴ˶��������̵�ģ̬�����ת����ԭ���ǹ���ģ̬�£������ߴ�г����ͬ���õĽ���������ݲ�ͬģ̬����˷ֶεĿ����ɣ�ϵͳ�������ߺ�ʵ�鲨����֤����һ��������Ч�ԡ�Ŀǰ�Ĺ����������ģ̬�̶��������ģ̬�仯�Լ������ɵ�³�����ǽ�������Ҫ��������⡣
�ο����ף�
[1] Andersen H R, Pedersen J K. Low cost energy optimized control strategy for a variable speed three-phase induction motor[C]//Proceedings of 27th Annual IEEE Conference on Power Electronics Specialists. Baveno, Italy: IEEE, 1996: 920-924.
[2] �ųл�, ���, ���췶. �첽���������С��Ŀ��Ʋ���[J]. �繤����ѧ��, 1998, 13(4): 25-29.
ZHANG Cheng-hui, LI Ai-wen, ZHANG Qing-fan. A new minimal loss control strategies on induction motors[J]. Transactions of China Electrotechnical Society, 1998, 13(4): 25-29.
[3] Rahman M. A solid state direct on line starter for medium voltage induction motors with minimized current and torque pulsations[J]. IEEE Transactions on Energy Conversation, 1999, 14(3): 402-412.
[4] Zenginobuz G, Cadirci I. Soft starting of large induction motors at constant current with minimized starting torque pulsations[J]. IEEE Transactions on Industry Applications, 2001, 37(5): 1334-1347.
[5] ����, ������, ½����, ��. һ�ֿ��Ǹ���ת�ص��첽������ſ��Ʋ���[J]. �廪��ѧѧ��: ��Ȼ��ѧ��, 2009, 49(4): 473-476.
FAN Yang, QU Wen-long, LU Hai-feng. A kind of control strategies based on field weakening of asynchronous machines on load torque[J]. Journal of Tsinghua University: Science, 2009, 49(4): 473-476.
[6] Kim C G, Lee J H, Kim H W, et al. Study on maximum torque generation for sensorless controlled brushless DC motor with trapezoidal back EMF[C]//Electrical Power Applications, IEE Proceedings, 2005: 1023-1026.
[7] ������, ������, ���, ��. ��Ӧ�������ϵͳ������Ӧ�����[J]. ����������Ӧ��, 2007, 24(1): 95-98.
YANG Li-yong, LI Zhen-xi, LI Hua-de, et al. Adaptive inverse control of induction motor speed regulation system[J]. Control Theory and Applications, 2007, 24(1): 95-98.
[8] Jalalifar M, Payam A F, Saghaeian S M, et al. Dynamic modeling and simulation of an induction motor with adaptive backstepping design of an input-output feedback linearization controller in series hybrid electric vehicle[J]. Serbian Journal of Electrical Engineering, 2007, 4(2): 119-132.
(�༭ �°���)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ��������Ȼ��ѧ����������Ŀ(50807041)
ͨ�����ߣ���־��(1980-)���У�ɽ��ƽ���ˣ���ʦ�����µ�����������������о����绰��0451-89996660��E-mail: 89996660@163.com
ժҪ���첽������̵�ת����Ӱ���ŵ���������ܡ�Ϊ���������ܣ������ྦྷբ���������첽���Ϊ�о�����ͨ����ѧģ�ͼ͵�·�����ö��ӵ�ѹ�����ӵ����Ľ�������ʽ���������������ߺ͵���Ƶ�ס����ݲ�ͬ�������ζ��������е�2��ģ̬���������2��ģ̬��������̷ֶΣ��ڲ�ͬ��ʩ�Բ�ͬ�����ɣ��Ӷ�ʵ������ת����˼�롣Ϊ��֤��һ˼�룬���п���ϵͳ�����ʵ�飬��������˵�������ת����ֵ���������ƣ�ʵ�ʵ������α���������ֵҲ������С��˵�����ַ�������Ч�ԡ�
