
37 kW�첽�����������ʵ��ƽ̨���о�
�����棬�����죬�߽�����������
(���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ������ ��ɳ��410083)
ժ Ҫ��
ժ Ҫ����Դ�ͳ�������ʵ��ƽ̨����С������DSP�������ڹ��������⣬�о�37 kW�첽���ͨ�ý�������ʵ��ƽ̨�����ܸ�ƽ̨����Ӳ����ƣ������ø�ʵ��ƽ̨��������Ԥ����Ƶ��첽���ֱ��ת�ؿ����㷨������Ԥ�����ԭ����ʵ�ַ������ڸ�ƽ̨����֤����Ԥ������㷨��Сֱ��ת�ؿ���ϵͳת�������Ŀ����ԡ��о�����������ÿ���ϵͳ����ѡ��˫DSP�ṹ���������TMS320F240�����������ǿ��TMS320C31������������ǿ���ص㣬ʹ��Эͬ���������ʵ��ƽ̨���ܣ�ƽ��ת������Ϊ6.7%��
�ؼ��ʣ�
�첽�������������ʵ��ƽ̨��˫DSP�ṹ��ֱ��ת�ؿ�����Ԥ�������
��ͼ����ţ�TM301.2 ���ױ�ʶ�룺A ���±�ţ�1672-7207(2009)04-0980-06
37 kW asynchronous motor AC speed regulation
experimental platform
YU Shou-yi, ZENG Guo-qing, GAO Jin-sheng, GUI Wei-hua
(School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: Since the power is small and the control period based on single DSP is hard to be shortened in conventional motor control experimental platform, a 37 kW asynchronous motor AC speed regulation experimental platform was researched. The software and hardware were introduced. The direct torque control strategy based on predictive control was developed by this platform, and the predictive control principle of the system and the implementing method were analyzed. The experimental results show that it is feasible to reduce the torque ripple of DTC system by using predictive control algorithm, and the average of torque ripple is 6.7%. The two DSP work parallel are used, making use of the strong motor control ability of TMS320F240 and strong floating-point calculation of TMS320C31, and the performance of the experimental platform is improved.
Key words: asynchronous motor; AC speed regulation experimental platform; double DSP; direct torque control (DTC); predictive control
���첽�������ϵͳ���Ƽ����У���ѹƵ�ȿ��ơ�ʸ�����ƺ�ֱ��ת�ؿ��Ʊ������ִ���������ϵͳ�㷺���á�Ϊ���о������ܵĿ��Ʋ��Ժ��ֵ��ٷ����Ŀ���Ч����һЩ�о����������Ե�DSPΪ���ĵ�С���������������ʵ��ƽ̨[1-3]�����ڲ������������ܴ���С���������ʵ�ֵĿ����㷨����ֱ����ֲ�����������ĵ������ϵͳ����DSP��ʵ��ƽ̨��Ҫ��ɸ��ӵ��㷨����Ҫִ�����ݲ� ����ϵͳ�����Լ��˻������ȹ��ܣ�������Ч���̿������ڡ�Ϊ�ˣ����������ڼ��ʵ���ҵ�Դ����������£���ƿ���һ�ֻ���˫DSP���ƽṹ��37 kW�첽���ͨ�ý�������ʵ��ƽ̨���ڸ�ƽ̨�Ͽ����������㷨����һ���ֱ������ʵ���첽�������ϵͳ��
1 ʵ��ƽ̨������Ʒ���
ʵ��ƽ̨Ӳ���ṹ��ͼ1��ʾ����Ҫ�������ع�Դ���DZ����ص����������ʵ�����̨�ȡ�
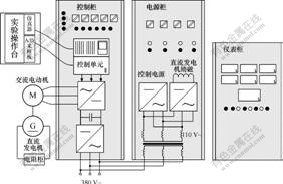
ͼ1 ʵ��ƽ̨Ӳ���ṹͼ
Fig.1 Hardware structure diagram of experimental platform
���ع���ϵͳ�ĺ��ģ���Ϊ����·�Ϳ��Ƶ�·2�֡�����·Ϊ���͵Ľ�ֱ����·����ͼ2��ʾ���������ֲ��ö����ܹ���������ʽ������·���پ����������˲�����ֱ����ѹ����IGBT���䱣����·���ɵ�������ʽ����·���������һ����ѹ��Ƶ�ʵ����ཻ���繩���첽�綯��������·�л������ϵ绺���·���ܺ��ƶ���·�������·�ɵ���R1~R3�ͽӴ���K1��ɣ���ֹ����ij�������������š��ܺ��ƶ���·��ֱֹ��ĸ������������ʱ�����ı�����ѹ��Ԫ������
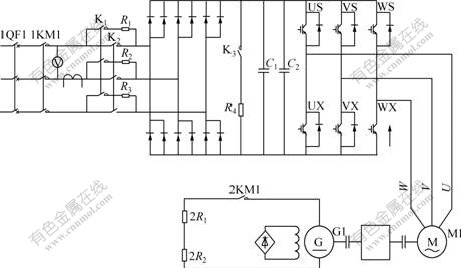
ͼ2 ����·�ṹͼ
Fig.2 Structure diagram of main circuit
���Ƶ�·�ṹ��ͼ��ͼ3��ʾ�����������Ƶ�Ԫ����ѹ������������·���Ӵ������Ƶ�·�Ͳ�����ʾ��·�ȡ�
ͼ3 ���Ƶ�·�ṹ��ͼ
Fig.3 Structure diagram of control circuit
���Ƶ�Ԫ����˫DSP�������ṹ�����У�����DSPΪTMS320C31������ǿ������ݴ������ܣ���Ҫ������ɸ��ָ��ӵĽ��������㷨�����þ��е�����Ƹ����źŽӿڵ�Ԫ��TMS320F240 DSPʵ�ַ������ƺ�PWM�����ź���������У�������������Ԫ�������ת�٣����ת�ٱջ����ơ�DSP֮��ʹ��˫��RAMʵ�����ݵ�ʵʱͨ�š���������·�ṩ����ѹ�����ķ����źţ��Ӵ�����·Ϊ����ϵͳ��·�ṩͨ�ϲ����ͱ������ƣ���ʾ��·Ϊ����ϵͳ�ṩ�˻��ӿڡ�
��Դ���ṩ������Դ�������Ƶ�Ԫ���Ӵ������������������DZ���ɢ�ȷ�����豸���硣�ɾ�բ����ɵ�������ʽȫ��������·Ϊֱ��������ṩ0~ 110 V�Ŀɵ����ŵ�ѹ��
�DZ������ϵͳ����״̬�źŵ���ʾ�ͱ������ܡ���Щ�ź�����������������ѹ������������������ص�ѹ�����͵����ת��ת���źŵȡ�
�������(M-G)���첽�綯���϶�ֱ���������ɣ����������ֱ������������ĵ��ܡ�M-G��1���Ժ�ϵͳ��ϵͳ�еķ�������ڲ�ͬ��ת����ͨ���ı������ѹ��������Ӧ�ĸ���ת�����첽�������ĵ��ת��ƽ�⡣
ʵ�����̨�ɹ�ҵ���Ƽ����������ʾ������������塢״ָ̬ʾ�ơ�DSP��������·���źŵ����Ͳɼ���·�Լ�Ƶѹת����·�ȹ��ɡ�DSP��������·�ɷ��������źŸ����·��ɣ���ѹ��������ת��ת���źŵĵ����Ͳɼ����źŲɼ���ʵ�֣�����źŵ�ƽƥ�䣬�빤�ػ��ӿڣ�Ƶѹת����·��ת��ת�ٲ���������������ź�ת��Ϊ���ݲɼ�������ĵ�ѹ �źš�
2 ʵ��ƽ̨�������
ʵ��ƽ̨��������ư���DSPʵ��ĸ��ֽ��������㷨������ʵ�����̨�ļ������2���֡����������㷨����ʹ��TI��˾�ṩ�ı�̹���Code Composer Studio(CCS)��д������̨�ļ����������Borland��˾��C++ Builder���ʵ�֡�
��������Ľ������������5���ӽ�����ɣ���������ͼ4��ʾ�������ѡ����Ҫ��һЩ��������������ť�����У��ɼ���ѡ������ʾ����ʵ��ϵͳ��ѡ�õ�AD�ɼ����ͺţ�ͨ�����������òɼ�ͨ������ʵ��ϵͳ�ɼ���·�źţ����Ƿֱ��Ƕ���A�����������B�������ֱ��ĸ�ߵ�ѹ�����ת�ء����ת�٣�����Ĭ�Ϸ�ʽ����ʼͨ������Ϊ0��ͨ����Ŀ��Ϊ5���������������òɼ���ÿһ���ɼ�ͨ�������档���������ú͵�������2�ַ�ʽ��������ʾ����5����ť����������1����ť���ᵯ��1����Ӧ���ӽ��棬��5���ӽ���������ʾ�ɼ����ɼ������ݲ��Ρ�

ͼ4 �������������ͼ
Fig.4 Main interface of monitor and control software
�����滹�п�ʼ��ֹͣ���˳�����ʾ4��������ť�����¡���ʼ����ᵯ��1���Ի���Ҫ��ѡ��1������ɼ����ݵ��ı��ĵ���ѡ�ú�Ϳ�ʼ�����ݽ��вɼ���Ϊ�˱�֤���ε���ʵ�ԣ�����������Ϊ2 ms�������ɼ�5���������ֵ�˲�����С�����źŵ�Ӱ�졣C++ Builder�Դ��Ķ�ʱ���Ե���1 s�Ķ�ʱ��ȷ��������ѡ�ö�ý�嶨ʱ��[4]����ʱ���ȴﵽ1 ms�����¡�ֹͣ����ֹͣ���ݵIJɼ��Ͷ�̬��ʾ�����¡���ʾ����ᵯ��1���Ի���ѡ��1���ѱ�����������ĵ���Ȼ���������ʾ������İ�ť���������ӽ�����ʾ��Ӧ�IJ��Σ�������Ϊ�ɼ�������������Ϊ�ɼ���ĵ�ѹ���������ܸ��������Զ����������ݲɼ��ĵ�������ɼ�ʱ�䣻���¡��˳������˳������档��ͬ�����㷨�IJ������ݷֱ𱣴����ı��ĵ����ʱ����ͨ�����������źŲ��Σ�Ҳ���ԶԲ�ͬ�㷨���жԱȷ�����
3 ���������㷨��ʵ��
3.1 ���������㷨
Ŀǰ��ֱ��ת�ؿ���������ӱ�Ŀ���˼�룬������˵�ϵͳ�ṹ�������Ķ���̬�����ܵ����ǵ�����������������ת������������г���ϴ�Ȳ���֮��������ʱת��������������[5-6]��Ϊ�˸���ֱ��ת�ؿ���ϵͳ�ĵ������ܣ�Takahashi��[7-8]����˫��������������˸���ɹ�ϵͳѡ��ĵ�ѹʸ���������ַ��������˹��ʵ�·�ĸ����ԣ�һ�����ڴ��ʳ��ϣ�����С���ʳ��Ϻ���Ӧ�á�Orille��[9-11]���������������ģ���Ż�����״̬ѡ����̵ķ�������Bang-Bang����ģʽ�Ŀ�����о������磬�����о������缰ѵ���㷨����һ�����������壬Ȼ�������ڸ��ƴ�ͳֱ��ת�ؿ���ϵͳ������û�ж���ʵ�����塣Wei��[12-14]�������ɢ�ռ�ʸ��(DSVM)���Ƶķ������÷��������˴�ͳBang-Bang ���Ƶ��ŵ㣬³���Ժã����ǣ����ƾ��ȵ�������Բ���ϸ�ֵ�ѹʸ��Ϊ���ۣ�ʹ���������Ƶ�����ӡ��ڴˣ�����������Դ�ͳֱ��ת�ؿ�����ת����������Ƶ�ʲ��ȶ����ص��������Ԥ����Ƶ�ֱ��ת�ؿ���ϵͳ�����ݴ�����ת��ƫ��ֵ��ѡ����ʵĶ��ӵ�ѹ�ռ�ʸ����
�Զ��Ӵ����͵��ת��Ϊ״̬�������첽�綯������ѧģ�Ϳɱ�ʾΪ��

��ʱ�����㹻�̣��Һ��Զ��ӵ���ѹ������ʽ(1)��д��![]() ����ʾ���Ӵ���ʸ���ı仯�������ڶ��ӵ�ѹʸ���������䷽������ڶ��������ϵĿռ��ѹʸ�����÷�����ͬ����ʽ(4)��֪��ת�صı仯��Ҳ�붨�ӵ�ѹʸ��������ء��ռ��ѹʸ�������ڴ�����ת�صķ�ʽ��ͼ5��ʾ����ѹʸ���ֽ�Ϊ�붨�Ӵ���ƽ�к��붨�Ӵ�����ֱ��2���������ֱ���ڶ��Ӵ����͵��ת�ء�ͨ��ת�ش����۲���������ת�غͶ��Ӵ���ʵ��ֵ�������������趨ֵ��ƫ�����ƫ�������ѹʸ�����Ա��������ѹʸ�����¸���������ȷ�ز�����ǰ��ת�غʹ���ƫ��������ܺܺõĸ��ٴ�����ת�ص��趨ֵ������ת�����������ڴ�ͳֱ��ת�ؿ���������������ṩ�ĵ�ѹʸ�����ޣ�����SVPWM�������Ƴ�����Ҫ�ĵ�ѹʸ����
����ʾ���Ӵ���ʸ���ı仯�������ڶ��ӵ�ѹʸ���������䷽������ڶ��������ϵĿռ��ѹʸ�����÷�����ͬ����ʽ(4)��֪��ת�صı仯��Ҳ�붨�ӵ�ѹʸ��������ء��ռ��ѹʸ�������ڴ�����ת�صķ�ʽ��ͼ5��ʾ����ѹʸ���ֽ�Ϊ�붨�Ӵ���ƽ�к��붨�Ӵ�����ֱ��2���������ֱ���ڶ��Ӵ����͵��ת�ء�ͨ��ת�ش����۲���������ת�غͶ��Ӵ���ʵ��ֵ�������������趨ֵ��ƫ�����ƫ�������ѹʸ�����Ա��������ѹʸ�����¸���������ȷ�ز�����ǰ��ת�غʹ���ƫ��������ܺܺõĸ��ٴ�����ת�ص��趨ֵ������ת�����������ڴ�ͳֱ��ת�ؿ���������������ṩ�ĵ�ѹʸ�����ޣ�����SVPWM�������Ƴ�����Ҫ�ĵ�ѹʸ����
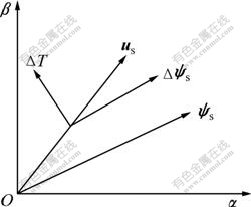
ͼ5 ���ӵ�ѹ�ľ���ʹ�ֱ����
Fig.5 Radial and tangential component of stator voltage
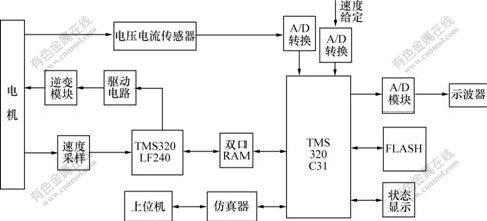
ϵͳ���ɿ�ͼ��ͼ6��ʾ������ϵͳ��Ƶ�˼���Ǽ�������ĵ�ѹʸ������1���������ڼ��ɲ���������ת��ƫ�������2�β�����������Ĵ���ת�������ʹ���ת�صĸ���ֵ��ʵ��ֵ֮���ƫ����ȣ�
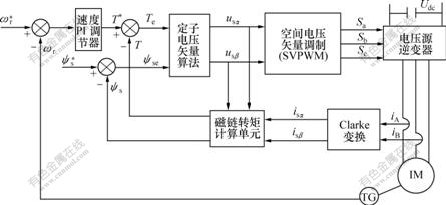
ͼ6 ϵͳ���ɿ�ͼ
Fig.6 Structure diagram of system
����ʽ(1)��(4)�����㶼��ʸ�����㣬Ϊ�˼��㷽�㣬��ʽ(1)����ͬʱ���![]() ������
������![]() ��Ȼ���������ྲֹ����ϵ
��Ȼ���������ྲֹ����ϵ![]() ����ɢ�����������ɵã�
����ɢ�����������ɵã�
���������Լ��㲹��ת��ƫ��Ͷ��Ӵ���ƫ��ĵ�ѹʸ����![]() ���ϵķ�����
���ϵķ�����
3.2 ʵ����
����CCS��д�˻���Ԥ����Ƶ�ֱ��ת�ؿ����㷨������ʵ��ƽ̨�Ͻ����˵��ԣ��ó�����ͼ7��ʾ��ʵ�鲨�Ρ���ͼ7���Կ���������Ԥ����Ƶ�ֱ��ת�ؿ���ϵͳʵ�鲨��Ч�����ã����ӵ����ӽ����ң�ƽ��ת������Ϊ6.7%�����ݴ������Ļ����ϵ���Ӷ��ӵ���Ƶ�ʼ�������ٶȺʹ��ٶȲ��η�ֵ��������ٶȻ���һ�¡�ֱ��ĸ�ߵ�ѹ�ȶ���5.5 V���ң�ĸ�ߵ�ѹ�����������ϵΪ100?1����ֱ��ĸ�ߵ�ѹ���κ͵���ٶȲ��ο������Կ����������д���һЩ����̬��ֵ���ܴ�ļ���ѹ���������ڵ�����ʱȽϴ������ݵIJɼ������д���һЩ�����źţ���Щ����ѹ�Ǹ����źŵ��µģ�����ʱ���Ժ��ԡ�
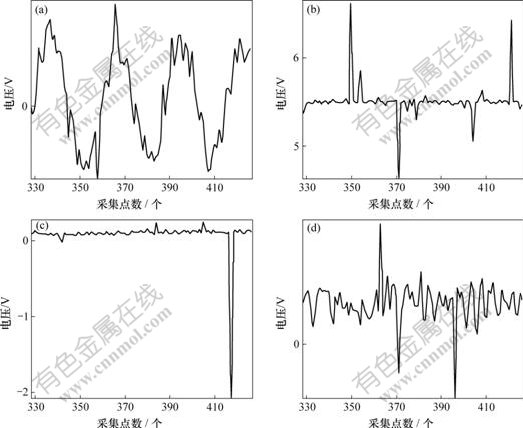
(a) ���ӵ���A�ನ�Σ�(b) ֱ��ĸ�ߵ�ѹ���Σ�(c) ����ٶȲ��Σ�(d) ������ת�ز���
ͼ7 ֱ��ת�ؿ���ʵ�鲨��
Fig.7 Wave diagram of DTC
4 �� ��
a. ��Ƶ�37 kW��������ʵ��ƽ̨����ǿ��Ŀ������ܣ�����������ֱ��ת�ؿ��Ƶ������ܸĽ��㷨����������VVVF���ơ�ʸ�����ƺ����ٶȴ������ȶ��ֵ�������㷨���о��Ϳ�����
b. ��д�ļ�ؽ������ֱ�۵���ʾ��������ֽ��������㷨��ʵ�鲨�Σ�����ʵ�����ĶԱȷ�����
c. ����Ԥ������㷨�ɼ�Сֱ��ת�ؿ���ϵͳ����ת��������
�ο����ף�
[1] ������, ������, �����. ����DSP�����ֻ��������ϵͳ������ʵ��ƽ̨���[J]. �繤������־, 2003, 22(9): 88-90.
LIU Tian-wu, LI Ming-cai. WU Ji-xiong. Design of development and experiment platform digital motor control system based on DSP[J]. Magazine of Electrotechnical Society, 2003, 22(9): 88-90.
[2] ��Сƽ, �� ��, �� ��, ��. ����TMS320F240���˶�����ʵ��ƽ̨[J]. �����Զ���, 2002, 21(4): 22-25.
ZHANG Xiao-ping, WANG Xu, YANG Gen, et al. A motion control experimental platform based on TMS320F240[J]. Ordnance Industry Automation, 2002, 21(4): 22-25.
[3] κ ��, �´�Ծ, �Դ���. �����������ʵ��ϵͳ��PC�˼�س������[J]. ���������, 2006, 32(8): 247-259.
WEI Xin, CHEN Da-yue, ZHAO Chun-yu. Design of PC monitor software in experimental variable-speed system of AC motors[J]. Computer Engineering, 2006, 32(8): 247-259.
[4] �� ΰ, �����. ��ý�嶨ʱ���ڹ�ҵ�����е�Ӧ��[J]. �ͻ���Ӧ��, 2001, 20(12): 8-10.
WANG Wei, XU Guo-hua. Application of multimedia timer in industry control[J]. Microcomputer and Application, 2006, 20(12): 8-10.
[5] �� ÷, ���¶�, ���, ��. ˫������任�������첽�綯�������Է���[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2005, 36(4): 658-663.
SU Mei, XU Xin-dong, LI Dan-yun, et al. Performance analysis of two-stage matrix converter driven asynchronous motor[J]. Journal of Central South University: Science and Technology, 2005, 36(4): 658-663.
[6] Kang J K, Sul S K. Torque ripple minimization strategy for direct torque control of induction motor[C]// Conf Rec 1998 IEEE Industry Applications, Piscataway: IEEE, 1998: 438-443.
[7] Takahashi I, Ohmori Y. High performance direct torque control of an induction motor[J]. IEEE Transaction on Industry Application, 1989, 25(2): 257-264.
[8] Wu X Q, Steimel A. Direct self control of induction machines fed by a double three level Inverter[J]. IEEE Transaction on Industry Electronics, 1997, 44(4): 519-527.
[9] Orille A L, Sowilam G M A. Application of neural networks for direct torque control[J]. Computer & Industrial Engineering, 1999, 37(1/2): 391-394.
[10] CAO Cheng-zhi, WANG Xin, LU Mu-ping. Direct torque control based FNN and optimization[C]//Internation Conference on Machine Learing and Cybernetics, Xi��an, 2003: 760-764.
[11] Giansalvo C, Maurizio C, Chuan L, et al. Direct torque control of induction motors by use of the GMR neural network[C]// Proceedings of the International Joint Conference on Neural Network. Piscataway: IEEE, 2003: 2106-2111.
[12] WEI Xin, CHEN Da-yue, ZHAO Chun-yu. Minimization of torque ripple of direct-torque controlled induction machines by improved discrete space vector space vector modulation[J]. Electric Power Systems Research, 2004,72(2): 103-112.
[13] Keyhani H R, Zolghadri M R, Homaifar A. An extended and improved discrete space vector modulation direct torque control for induction motors[C]//IEEE 35th Annual Power Electronics Specialists Conference, 2004: 3414-3420.
[14] Casadei D, Serra G, Tani A. Implementation of a direct troque control algorithm for induction motors based on discrete space vector modulation[J]. IEEE Transaction on Power Electronics, 2000, 15(4): 769-777.
�ո����ڣ�2008-11-04�������ڣ�2009-02-19
������Ŀ��������Ȼ��ѧ����������Ŀ(60574030)
ͨ�����ߣ�������(1940-)���У������ϲ��ˣ����ڣ���ʿ����ʦ����������Ӧ���ƣ��˹����ܵ��о����绰��0731-88836739��E-mail: s_yushouyi@sina.com
