
DOI: 10.11817/j.issn.1672-7207.2015.02.022
һ�ֲ����ֲ�ʽԴ�������ʾ��ֿ��Ʋ���
��Ң����������÷����Ң���Ȼ۱�������
(���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ������ ��ɳ��410083)
ժ Ҫ��
������ϵͳ�У����ڸ������֮�������迹�������迹���ڲ��죬��ˣ�Ӧ�ô�ͳ���´����Ʋ��Իᵼ��������������־��ȽϵͶ���ɻ������⡣Ϊ�˼�С���������������ľ��ȣ����һ�ָĽ����´����Ƶ����������ֲ��ԡ��÷������õʹ���ͨ�Ż�ȡ��Դ����������Ϣ��������ѹ�´��������ߵĵ�ѹƫ�ã��ﵽ������������侫�ȵ�Ŀ�ġ�ͬʱ��������Ļ������ɵ�ѹƫ��Ϊ�Ż�ָ���Ŀ�꺯�����Ż�����ƿ��Ʋ������о�����������Ľ��������ַ����ڲ�Ӱ���й����ʾ��ֵ������£����������Դ�����ʾ��ֵľ��ȣ����������õĶ�̬����̬���ܡ�
�ؼ��ʣ�
�������Ľ��´��������������������ʹ���ͨ�ż����������Ż���
��ͼ����ţ�TM712 ���ױ�־�룺A ���±�ţ�1672-7207(2015)02-0525-09
A control strategy of reactive power sharing for parallel distributed micro-sources
LIU Yao, HAN Hua, SU Mei, SUN Yao, CHEN Huibin, LONG Xi
(School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: For multi-inverters parallel operation in microgrid, the output impedance of inverters and the line impedance between the inverters and point of common coupling are always different, which can result in big circulating current and low precision of power sharing among inverters by using the traditional droop control method. To reduce the circulating current and improve the reactive power sharing accuracy, a novel droop control strategy of reactive power sharing was proposed. The method with low bandwidth communication was employed to modify the voltage bias of reactive power-voltage droop characteristic, so that the reactive power sharing accuracy can be improved. The objective function was proposed with the optimization index of circulate current and load voltage deviation, and the system parameters were optimized and designed. The results show that the improved droop controller can achieve load reactive power precisely without affecting the active power sharing, and it also has a good dynamic and steady-state performance.
Key words: microgrid; improved droop control; reactive power sharing; low-bandwidth communication; parameter optimization
�ֲ�ʽ����(DG)������Ⱦ�١���Դ�����ʸߡ���װ�ص����������Դ�������·���С���ص㣬��Ϊδ�����͵����������������Ч֧�ţ���δ������ϵͳ�ķ�չ����֮һ[1]��������Ϊ�ֲ�ʽ��Դ����Ч���壬����������ʽ��Դ������װ�á�����ת��װ�á������Լ����ɿ���[2]���豸�����������ڹµ��Ͳ���2��ģʽ�£��ǽ������ֲ�ʽ��Դ�������Ч;�����������У�Դ������������п��Ʋ���һ����û����л����ߵ����ӿ��Ʒ�[3]�����п��Ʒ�[4]��ƽ�����ط��䷨[5]�ͻ��������ߵ��´�����[6-7]�ȷ��������л����л�����ͨ�ŵķ������Դﵽ�ܺõľ���Ч���������������ѹ��г�������ʡ�Ȼ���������ߵĴ��ڻ�����ϵͳ������Ժ������ԣ��Ӷ���������ϵͳ�Ŀɿ��ԡ����������ߵĶԵȿ��Ʒ�����Դ��ͬ������е��´�����˼�룬�����й����ʡ������ʺ͵�ѹ��Ƶ�ʡ���ֵ֮��Ķ�Ӧ��ϵ���������������ѹ�ο�ֵ���������У����ڸ�Դ�����ɵ��迹���ȣ���ɸ�������������ʲ��ܾ��֣���������DG��������ص�������[8]��Ϊ��������⣬�����о��߶Դ�ͳ���´��������˸Ľ�������·��бȺܸߵ�����£�Engler��[9]���÷��´����Կ�������������ѹ�ķ�ֵ��Ƶ�ʡ�����·�迹�е����Գɷֺ��Գɷ־����ɺ���ʱ��Brabandere��[10]�����й����ʺ������ʽ���ķ�����ȷ�ؿ���ϵͳ������ʣ������ַ�����Ҫ��ȷ�ػ����·����бȡ����⣬����[11]����һ������������ֹг���ֲ��������������Ӱ�죬������翹�����ӵ��������ѹ���䣬������ϵͳ��ѹ��������������������迹�㷨��������Ŀ��ƴ���Ҫ��ϸߣ�ʵ���ѶȽϴ�������һЩ�о���Ա���ø��Ϸ�������������������ڱ����������´��������ԵĻ����ϼ���ͨѶ��[12]���Ŵ�����[12-13]����˻�������ʽ�����ӿ��Ʒ�����ͨ��ͬ��BUSĸ�ߺ�CAN���߿��Ƹ���������źŵ�ͬ���ͷ�ֵ�ĵ���ʵ�ֹ��ʾ��֣���ͨѶ����Ҫ��ͳɱ��ϸߡ����������������л����ߵĿ��Ʒ�����������õIJ������Ե�����ϵͳ����Ⱥ����Ӹ������ߣ����������ź��ߵIJ������Ʒ���ʵ����ϵͳ����ȣ�����������Ч���½������������ۺ���Щ���������ӣ����һ�ָĽ��´����Ƶ����������ֲ��ԡ��÷������õʹ���ͨ�Ż�ȡ��Դ����������Ϣ������������ѹ�´����Ƶĵ�ѹƫ�ã�������������侫�ȡ��봫ͳ���´����Ʋ�����ȣ��÷������м�������ʵ�֡���ͨ�Ŵ���Ҫ�ߺ;�ȷ�������ʾ��ֵ��ŵ㡣����ڽ���2̨�������������ϵͳ��С�ź���ѧģ��[14]�Ļ����ϣ�ͨ��״̬�����������ķֲ�������ϵͳ�Ķ�̬���ԣ���֤��ϵͳ���ȶ��ԡ�
1 ���������´�������ԭ��
1.1 �����Ľṹ
�����ɷֲ�ʽ��Դ(DG)���ɹ��ɣ�ÿ��DG��Ԫͨ���������ӽӿں���Ӧ���߽�������ĸ����,��ṹ��ͼ1��ʾ���������������ڲ���ģʽ�£�Ҳ�ɹµ��������С��ڲ���ģʽ�£�ֻ�����Դ����Ϊ����Դ��Ϊ����ˣ�������Լ����ڹµ�ģʽ�£���Ҫ����Դ����Ϊ��ѹԴ���ṩ��ѹ֧�ţ��������Բ�������������������⡣��ˣ����Ľ���Թµ�ģʽ�������Ļ����й������ľ������⣬���һ�ָĽ����´������㷨�������Ƿ����Ը��ؾ������⡣
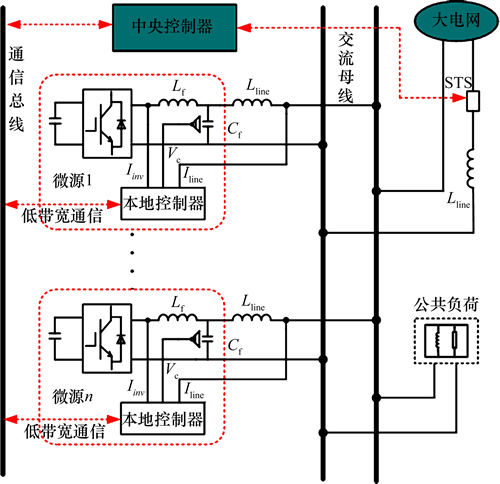
ͼ1 �����Ľṹ
Fig. 1 Schematic of microgrid configuration
1.2 ��ͳ���´�����
ͼ2��ʾΪ������2���ֲ�ʽ��Դ�IJ���ϵͳ��ԭ��ͼ���ڹµ�����ģʽ�£�2���ֲ�ʽ��Ԫ��������Ƶ�ʺ͵�ѹ��ֵ��������й������������������ȶ����С�
��ͼ2�ɵ������������й�����Pn��������QnΪ��
 (1)
(1)
 (2)
(2)
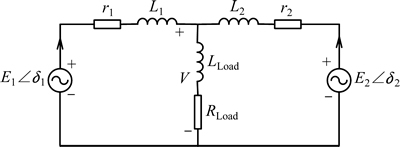
ͼ2 2̨���������ϵͳ��ԭ��ͼ
Fig. 2 Schematic diagram of two distributed generations
���У�xnΪ����Դ����п�����·�п�֮�ͣ�rnΪ����Դ������������·����֮�ͣ�EnΪ����Դ�����ѹ��ֵ����nΪ����ϵͳ�����ѹʸ��֮��ļнǣ�nΪ��n���ֲ�ʽԴ(n=1��2)��
����ʵ�������ƫ���n��С������Ϊsin��n=��n��cos��n=1��ͬʱ������ʵ���зֲ�ʽԴͨ�����ô�������翹����֤ϵͳ���ȶ��Ժ�����Ӧ���´����Ƶ�����[6, 11]����ˣ�����Ϊxn����rn�������������ǣ�ʽ(1)��(2)�ɷֱ�дΪ��
 (3)
(3)
 (4)
(4)
��ʽ(3)��(4)���Կ�������DG��Ԫ������й�����Pn����ͨ����Ǧ�n���ڣ�������Qn����ͨ����ѹ��ֵ���ڡ���ˣ��ڲ��������������ͨ��ʱ���Բ��ô�ͳ���´����ƣ�
 (5)
(5)
ʽ�У���*��E*�ֱ�ΪDG�ڿ����������ѹ�Ľ�Ƶ�ʺͷ�ֵ����n��En�ֱ�ΪDGʵ�������ѹ�Ľ�Ƶ�ʺͷ�ֵ��mn��qn�ֱ�ΪƵ�ʺ͵�ѹ���´����档
��ʽ(5)��������ʽ����ʽ(4)���õ������ʵı���ʽ��
 (6)
(6)
��ʽ(6)��֪������ʵ�ʷֲ�ʽԴ���������翹�����úͱ�ѹ����в������ڣ��ʿɺ�����·�� ��[6, 11]�����ֲ�ʽԴ����������������·�翹xn�����ص�ѹ��ֵE*������ĸ�ߵ�ѹV�����´�����qn�йء�ʽ(6)�У�����xn����V��xn����E*����ˣ���ʽ(6)�����Է�����֪����·�迹������ֲ�ʽԴ��������ܾ��ֵ������������ء���������2̨�ֲ�ʽԴ��������ȣ������´�����������ͬ�������ڲ�ƥ��������迹x1��x2����DG1�����������С��DG2��������ʣ�������·�������ز�ƥ��ʱ����������ϵͳ���ȶ���[11]����ˣ��б�Ҫ�Դ�ͳ�´����ƽ��иĽ���
2 �Ľ������´����Ʋ��Լ������Ż�
2.1 �Ľ������´����Ե����
����Ƶ��Ϊȫ�ֱ�����ʹ�й�����������ܵ�Ч�迹��Ӱ�죬�������ʵ�ֱ�����ȷ���֡��������ʵ�ƫ������·�迹���졢�����ѹ��ֵ���졢�������ӽṹ����������
 (7)
(7)
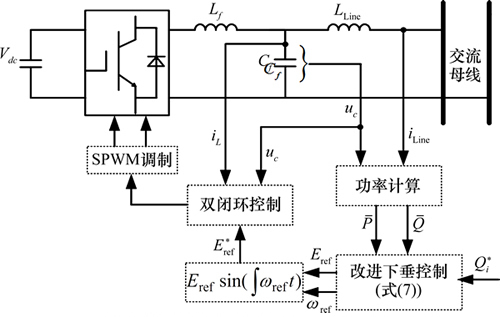
Ϊ�˷���ͳ�������´���ȱ�ݣ�����Ľ�������ѹ�´����Ʊ���ʽ����ʽ(7)��ʾ��ʽ�У�mn��qn�ֱ�Ϊ��n̨Դ��Ƶ�ʺ͵�ѹ���´�����(n=1��2��3����)���ɸ����������������ã�Qn*Ϊÿ��Դ��̬ʱ����������������ʣ�KqΪ����ʱ�䳣����KrΪ��ʱ�䳣����ͼ3��ʾΪ�Ľ����´����ƿ�ͼ��
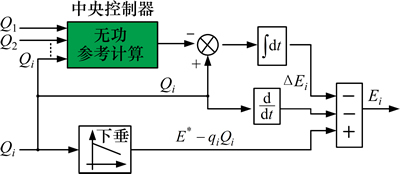
ͼ3 �Ľ�������ѹ�´����ƿ�ͼ
Fig. 3 An improved droop control scheme of reactive power
2.2 �Ľ��㷨�Ĺ��̺�ͨ��Ҫ��
��ͳ���´����ƽ����ñ��������ʣ�����ͨ�Ż��ڡ���������ĸĽ������㷨�����������[14]�������£����������ڸ���Դ������Ϣ���������ο�����õ�ƽ���������Qn*��Ȼ��Qn*ͨ���ʹ���ͨ�ŷ�����ÿ��Դ��Դͨ��ʽ(7)�е�������-��ѹ�´�����ʽ����������������ʣ���̬ʱ�������������ο�ֵ����ʽ(7)��֪�����ķ��������ʹ�ͳ����Դ��ֵ(ֱ���ź�)����ͨ�ŵĴ����ͳɱ�Ҫ��ϵͣ���������������������Ķ�̬Ҫ���ߣ���ˣ���ʵ���п�ͨ�����۵�RS232/485ͨ��ʵ�����ݴ��䡣����Ҫ˵�����ǣ��ʹ���ͨ�Ž���ʵ�ֱ��㷨ʽ(7)��һ��ͨ���ֶΣ�����ͨ��ϸ�ڲ��DZ����о����ص㡣
��1��ʾΪ���㷨��ͨ��Ҫ��ıȽϡ����У���ͳ���´����Ʋ���������ͨ�ţ�����ͨ�ųɱ��������ܾ��������ʣ��Ӷ�����ϵͳ����������[12-13]����CAN������ͨ�ţ���Ҫ��ͬ�����屣ָ֤���źŵ�һ���ԣ���ˣ��������ͨ�ųɱ��ϸߡ����IJ������۵�RS232/485ͨ�ţ����õ���������Ϣ��Ϊֱ���źţ�������ͳɱ��ϵͣ�������������ʾ��ֵľ��ȡ�
��1 ���㷨��ͨ��Ҫ��Ƚ�
Table 1 Communication requirements comparison between algorithms

2.3 �Ľ��㷨�IJ����Ż�
�Ľ������´��㷨�к����������������ƫ�����ϵ����������ϵ�����Ҳ���Ӱ��ϵͳ���ȶ��ԺͶ�̬���ܣ���ˣ��б�Ҫ��������������´��㷨�еIJ��������Ż������ȣ�������ϵͳ�У���ѹ��Ҫ������һ����Χ�ڣ�����Ӱ������������������Σ����и���ԴӦ�����������������ٻ�������ˣ�����ѡ�ɹ������ѹ�ͻ�����Ϊ�Ż�ָ�꣬�������ֹ�����ѹ�ӽ��ֵ��������Ϊ0 A���õ���Ŀ�꺯��Ϊ��
 (8)
(8)
 (9)
(9)
���У�EerrΪ�빫��ĸ�ߵ�ѹָ���йصĵ�ѹ���Ŀ�꺯����|En-1|������������ĸ�ߵ�ѹƫ��ֵ�ij̶ȣ���QerrΪ�뻷��ָ���йص�Ŀ�꺯����|Qj/Qjn-Qk/Qkn|������������������2��Դj��k�����ƫ��̶ȣ�nbusΪ������ѹ���ߵ���Ŀ��ns��ʾԴ����Ŀ��Qjn��ʾ��j��Դ�Ķ��������
����ÿ���Ż�ָ��Ȩ�أ��Դ˺�����ָ���ϵͳ����Ҫ�ԡ���ˣ��õ��Ľ������´��㷨�������Ż�Ŀ�꺯��Ϊ
 (10)
(10)
���У�Ŀ�꺯�������Լ������Ϊ
 (11)
(11)
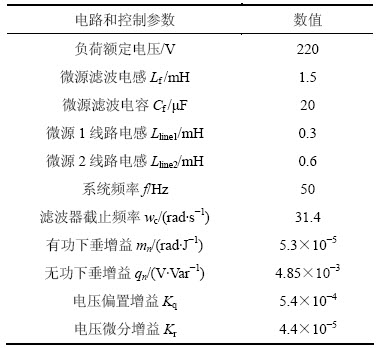
��Լ�������У�Kqmax��С�ź�ģ����ȷ��������ѹƫ�ò�����Krmax��ϵͳ�ٽ��ȶ�������ֲ��������Ǹ��ɵ�ѹƫ��ͻ���ָ���ͬ����Ҫ�ԣ�������Ż�ָ��Ȩ����ȣ����Ц�1=��2=0.5������һ�������������������ô�Ŀ�꺯�������Ž�(qn��Kq��Kr)��������2��ʾ��
��2 DG��Ԫ�ĵ�·�Ϳ��Ʋ���
Table 2 Circuit and control parameters of DG units
3 ���ڸĽ������´�����С�ź�ģ��
3.1 ���ڸĽ������´�����С�ź�ģ�͵Ľ���
Ϊ���ڷ���������2̨������ȵIJ��������Ϊ�����������ȶ�ƽ��㸽����С�ź���ѧģ�ͣ����۲���ϵͳ���������ȶ��Ե�Ӱ�죬�Ա�Ϊϵͳ���Ʋ�����ѡ���ṩ���ݡ�
ʽ(7)�У����ƹ��ʶ��ǽ�˲ʱ����ͨ����ͨ�˲����˲���õ���Ϊ��������һ���˲�����Ч���档����С�źŷ�����������ϵͳ�ȶ������㸽����һ����С���Ŷ������Եõ��ڹ����㸽�����Ի��Ľ����
 (12)
(12)
ʽ�У�n=1��2���Թ��ʷ���(3)��(4)����С�źŴ�����
 (13)
(13)
��DG1�����͵����´�����ʽд��
 (14)
(14)
DG2Ҳ�����Ʊ���ʽ��DG1�ĸĽ���С�ź���ѧģ��Ϊ
 (15)
(15)
����ʽ(12)��ʽ(15)���õ�DG1��״̬����Ϊ
 (16)
(16)
����
 ��
��
 ��
��
 ��
��
��ʽ(13)д��ʽ(17)��������DG1��DG2��״̬�����飬�õ�2̨�����������С�ź���ѧģ�ͣ�
 (17)
(17)
 (18)
(18)
3.2 ���ڸĽ����´�����С�ź�ģ�͵ķ���
�����о��Ķ�����50 Hz�����������ɵIJ���ϵͳ��������ĵ����Ϳ��Ʋ������2��ʾ������Щ��������ʽ(18)���ɵõ����ڸĽ����´�����С�ź���ѧģ�͡�ͼ4��ʾΪϵͳ״̬�������������ſ��Ʋ����ı仯�����
ͼ4(a)��ͼ4(b)��ʾ�ֱ�Ϊ�й��´������1��10-6 rad/J�䵽1��10-3 rad/J�����´������1��10-4 V/Var�䵽1��10-1 V/Varʱ��Ӧ�ĸ��켣�ֲ��������Ȼ�������й��´����棬��������Խ��Խ�������ᣬ����1�Թ������Խ��ԽԶ�����ᣬϵͳ�����������������������Խ������Ӧ�ٶȱ������Ҳ������ȶ������������´����棬��1�Թ��������鲿��С��������ǿ���������������û�б仯����ϵͳ���ȶ��Ժ���Ӧ�ٶȼ���û��Ӱ�죬Ҳ˵�����ڸĽ������´����Ʒ������ȶ��ԺͶ�̬���ܶ��´����治���У�����������־��ȵ�ͬʱ��û�н���ϵͳ�ȶ��ԺͶ�̬���ܡ�
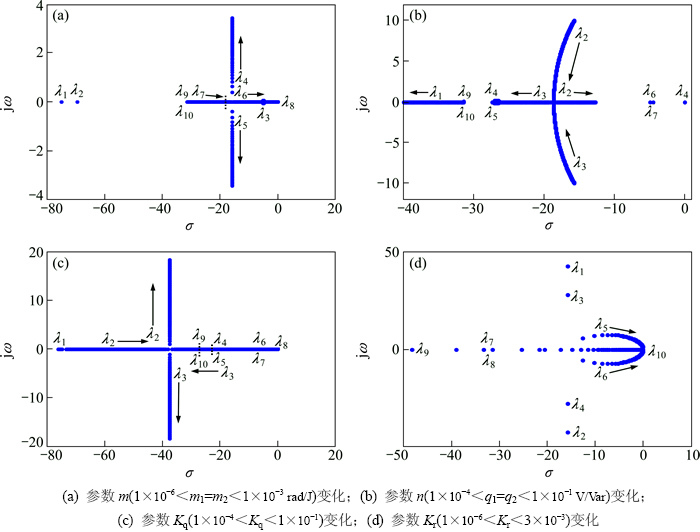
ͼ4 ���ڸĽ����´����Ʋ����仯�ĸ��켣�ֲ�
Fig. 4 Root locus diagrams with variations of proposed droop control coefficients
ͼ4(c)��ͼ4(d)��ʾ�ֱ�Ϊ��ѹƫ�ò�����1��10-4��1��10-1���������1��10-6�䵽3��10-3ʱ��Ӧ�ĸ��켣�ֲ����������ѹƫ����ָ���ķ�Χ������ʱ��ϵͳ���������㽫��Զ�����ᡣ����ѹƫ�ò�������1��ʵ���㽫�����������Ϊ�������㣬������ϵͳ���ȶ�������ѹƫ�ù�С����1���������㽫��Զ���������ʱ������ʱ�����Ӱ��ϵͳ�Ķ�̬���ܡ����ֲ�������ʱ�������������㿿����㣬������ϵͳ�ȶ�����ˣ���ѹƫ�òκ��ֲ��������ȡֵ���ڱ�֤ϵͳ�ȶ��Ե�ǰ���£���ǿϵͳ�Ķ�̬�������ܡ�
4 �����ʵ��
4.1 ������֤
����Matlab/Simulink�����ϵͳ����ģ�ͣ�����֤�Ľ�����ѹ�´����Ʋ��ԵĿ����ԡ��÷���ģ����2̨������ͬ��DG��Ԫ�����Ը�����ɣ�DG��Ԫ�������߽�������ĸ�ߡ����и�DG��Ԫ�ĵ�·�������2��ʾ��ͼ5��ʾ��Ϊ����ϵͳ�е���DG����ʾ��ͼ��
ͼ5 DG��Ԫ����ʾ��ͼ
Fig. 5 Simulated scheme of single DG unit
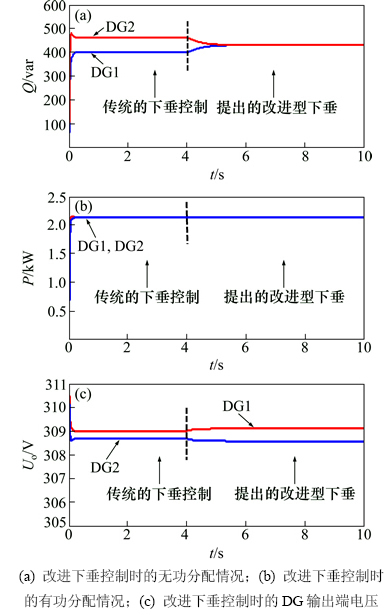
4.1.1 ����1
���ñ�������ĸĽ�������ѹ�´����Ʋ��ԣ�2̨��ͬ������Դ�������С�ͼ6(a)��ʾΪ2��Դ������������������t=4 s֮ǰ��Դ1����·���Ϊ0.3 mH��Դ2����·���Ϊ0.6 mH��������·�ϲ�����ĵ�ѹ�����´�ͳ�������Ʋ�����ȫ���ָ��������ʣ���Դ1�����Ϊ470 Var��Դ2�����Ϊ400 Var����t=4 s֮���øĽ����´�����ʹԴ�������Ϊ430 Var��
ͼ6(b)��ʾΪ2��Դ�й���������ķ���������ͼ6(b)��֪����Դ����й���Ϊ2.2 kW���Ľ����������㷨����Ӱ���й����֡�ͼ6(c)��ʾΪ2��Դ�����ѹ��ֵ�ı仯������Ľ�ǰԴ�����ѹ��ֵ�ֱ�Ϊ309 V��308.6 V���Ľ���Դ�����ѹ��ֵ�ֱ�Ϊ309.5 V��308.3 V��Դ�������ѹ������������ʹ�������仯������������Χ�ڡ�����1�ķ������������Ľ����´������㷨���ڲ�Ӱ�츺���й����ֵ������£���������Դ������ľ��־��ȡ�
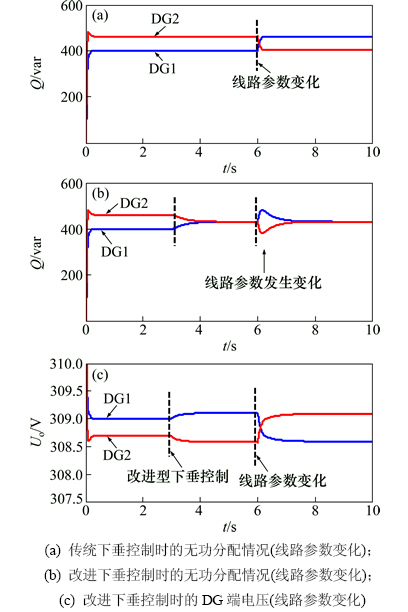
4.1.2 ����2
���������Բ�����·�����仯�ԸĽ����������㷨��Ӱ�졣��t=6 sʱ��2��Դ����·����������ԣ�DG1��Ԫ����·������0.25+j0.062 8����0.1+ j0.031 4��DG2��Ԫ����·�������䡣ͼ7(a)��ͼ7(b)��ʾ�ֱ�Ϊ2��Դ�ֱ��ڴ�ͳ���ƺĽ�������������������ͼ7��֪�������ô�ͳ�´����Ʋ���ʱ��Դ�����ƫ��ԼΪ70 Var�������øĽ����´����Ʋ���ʹ�ø�Դ���������С�Ŷ����������ȶ������430 Var��ͼ7(c)��ʾΪԴ����˵�ѹ�ķ�ֵ�仯�������ͼ7(c)�ɼ����Ľ�ǰԴ�����ѹ��ֵ�ֱ�Ϊ309.5 V��308.3 V���Ľ���Դ�����ѹ��ֵ�ֱ�Ϊ308.4 V��309.6 V����·�����IJ���Ӱ�������ѹ�IJ��Σ����仯���ں�����Χ�ڡ�
ͼ6 ����1������
Fig. 6 Simulated results of test 1
��ˣ�����·���������仯ʱ����ͳ���´����Ʒ���ʹԴ�����ƫ���ַ����仯���Ľ����´����Ʒ������ܸ��ƺ����Դ������ľ��־��ȣ�������·�����仯��Ӱ������ֶȡ�
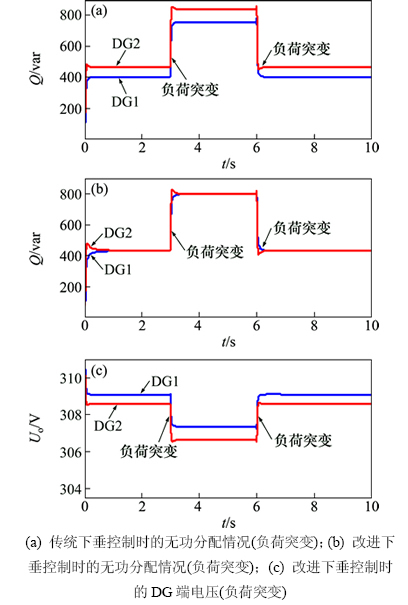
4.1.3 ����3
�������������Է����Ľ����������㷨�ڸ���ͻ��ʱ������Ч������һ����֤�÷�������Ч�ԡ����ɵ�ͻ���������£���t=3 sʱ����������ԼΪ2.0 kW���й����ɺ�0.8 kVar�������ɣ���t=6 sʱ�����ؼ���ԼΪ2.0 kW�й�����0.8 kVar�����ɡ�ͼ8(a)��ͼ8(b)��ʾ�ֱ�Ϊ2��Դ�ڸ���ͻ��ʱ��ͳ�´����ƺĽ����´����������µ�������Ч������ͼ8��֪�������ô�ͳ���´������㷨���ɵIJ���������·ѹ����ƽ�⣬Դ�����ƫ����80 Var������100 Var�������øĽ����������㷨��Դ�����ƫ�����Ϊ0 Var��ͼ8(c)��ʾ���ڸ���ͻ��ʱ���Ľ��㷨ʹԴ���ѹ�������仯���Ⱦ��ں����ķ�Χ�ڡ�����������������ͻ��ʱ���Ľ����´����Ʒ������ܱ�֤���õľ��ֶȡ�
ͼ7 ����2������
Fig. 7 Simulated results of test 2
4.2 ʵ����֤
��ʵ���ҽ���һ��2̨���������ϵͳ��֤�㷨����Ч�ԡ�����·������������CM75DY-24H�����ư������DSP 28335��FPGA EP2C8T144C8N���ɡ������������Ϊ��ֱ�����ѹ80 V������·�������1��ʾ������Ϊ��и���(16 ����3 mH)������Ƶ�ʺͲ���Ƶ�ʾ�Ϊ12.8 kHz��ͼ9��ͼ10��ʾ�ֱ�ΪԴ��̬����ʱ����ĵ����ͻ������Ρ�DG1����·���Ϊ0.3 mH��DG2����·���Ϊ0.6 mH����Դ�������ѹ���ֵԼΪ50 V��ͨ��1Ϊ�������ɲ��ѹ��ͨ��3��4�ֱ�ΪԴ���������ͨ��mathΪϵͳ����ioH=(i01-i02)������Դ�IJ�����һ�£����ô�ͳ�������Ʒ���ʹ��Դ����������ڽϴ����λ�����һ���ĵ������䣬��ʱ��ϵͳ�����ϴ���i0H���ֵΪ2.10 A�����øĽ����´����Ʒ���ʹ��ϵͳ��������������λ������������Ա�С���һ���i0H���ֵ������0.15 A����ˣ��봫ͳ�Ŀ��Ʋ�����ȣ�����������ʾ��ֵľ��ȡ�
ͼ8 ����3������
Fig. 8 Simulated results of test 3
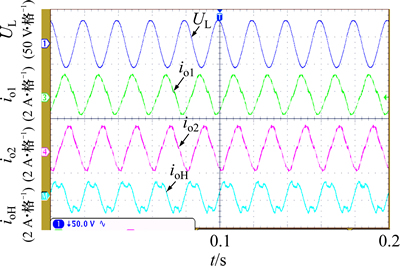
ͼ9 ��ͳ���Ʒ����»�õ���̬ʵ�鲨��
Fig. 9 Steady state experimental waveforms with conventional droop controller
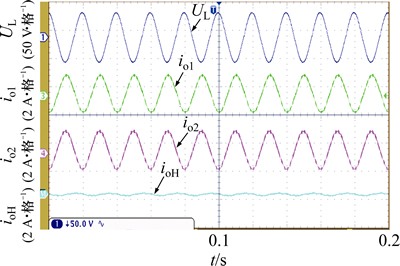
ͼ10 �Ľ��Ϳ��Ʒ����»�õ���̬ʵ�鲨��
Fig. 10 Steady state experimental waveforms with improved droop controller
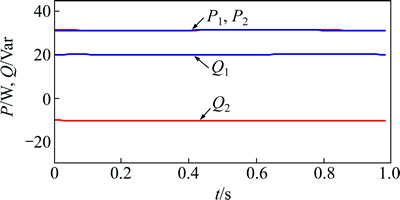
ͼ11��ͼ12��ʾ�ֱ�ΪԴ��̬����ʱ������й����ʺ�������ʵ�鲨�Ρ���ͳ���Ʒ����»�õ���̬�й����ʷֱ�Ϊ31.40 W��30.90 W����õ���̬�����ʷֱ�Ϊ19.80 Var��-10.50 Var���Ľ��Ϳ��Ʒ����»�õ���̬�й����ʷֱ�Ϊ30.60 W��31.10 W����õ���̬�����ʷֱ�Ϊ4.85 Var��4.40 Var������������������øĽ����´������ڲ�Ӱ���й����ʾ��ֵ�����£�Դ����������ʾ��־��ȴ����ߣ��Ӷ���С��ϵͳ������
ͼ13��ʾΪ��Դ�������������(i01-i02)�IJ��Σ���ȡ�˼ӸĽ��Ϳ��Ʋ���ʱ�̵���̬���̡���t=1.5sʱ���ӽ��Ľ����´����Ʋ��ԡ��ɼ���ϵͳ�������ֵ�ɸĽ�ǰ��2.10 A�����Ľ����0.15 A��ϵͳ��������С����Դ������������ɴ�ͳ���Ʒ����µ�20 Var��-10 Var��������5 Var��Դ��������ʵõ��������֡�
ͼ11 ��ͳ���Ʒ����»�õ���̬����ʵ�鲨��
Fig. 11 Steady state power experimental waveforms with conventional droop controller
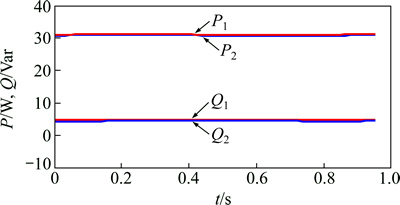
ͼ12 �Ľ��Ϳ��Ʒ����»�õ���̬����ʵ�鲨��
Fig. 12 Steady state power experimental waveforms with improved droop controller
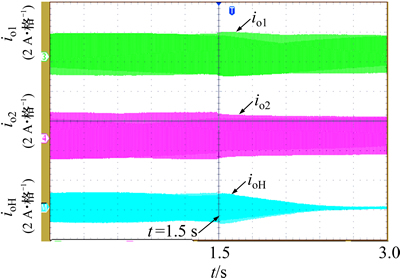
ͼ13 ��Դ���������ϵͳ��������
Fig. 13 Output current and circulating current waveform of inverters
ͼ14��ʾΪ�����л�ʱ�����������������κ�ϵͳ�������Ρ���ͼ14��֪����t=1.5 s֮ǰ��Դ1��2������������ֵԼΪ2.8 A����t=1.5 s֮��Դ1��2������������ֵԼΪ1.6 A���ڲ�ͬ�ĸ����£����øĽ����´��ز���ʹ�û���Ϊ0.21 A�������ϲ���������0����ˣ���Ȼ��ʵ�ָ������ľ��֣������ȶ���Ҫ�������л��������нϿ�Ķ�̬��Ӧ���ԣ������нϸߵľ������ܡ�
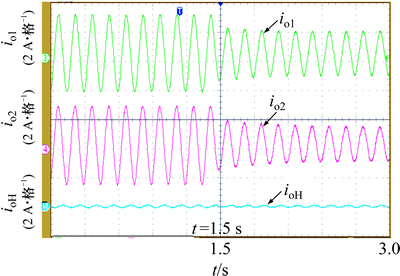
ͼ14 �����л�ʱ��Դ�����������������
Fig. 14 Output current and circulating current waveforms when load steps
5 ����
�ڷ��������е�ѹ/���´����ԵĻ����ϣ����һ�ָ���DG�������ʾ��ֵĿ��Ʋ��ԡ��÷������õʹ���ͨ�Ż�ȡ��Դ����������Ϣ��ͨ���ı䴫ͳ�´����Ƶĵ�ѹƫ�ã�����������ʾ��־��ȡ����⣬����С�źŷ�������֤���˸Ľ����´����Ʋ��Ե��ȶ��ԣ�Ϊϵͳ����������ṩ�����ݡ������ʵ����֤�˸÷�������Ч�Ժ���Խ�ԣ�
1) ���������˷ֲ�ʽԴ��������ʵľ��־��ȣ�������Դ��������������
2) ����ʹ���ͨ�ż�������ͨ�ż�����ʵ�֣���ͨ��ʵʱ�Ժ�ͬ����Ҫ�ߡ�
3) �÷����������Ľṹ�����У���ˣ������ڸ��ӵ������ṹ��
�ο����ף�
[1] ��Ԫ��, ÷��ΰ. ���ʺ���, ���ƻ���, ���ص���ϵͳ����������[J]. �й���ѧ����, 2003, 17(3): 185-187.
SUN Yuanzhang, MEI Shengwei��Exploring the new advantages of the electric power system through international cooperation[J]. Science Foundation in China, 2003, 17(3): 185-187.
[2] ³����, ����ϼ, ����, ��. �����о�����[J]. ����ϵͳ�Զ���, 2007, 31(19): 100-107.
LU Zongxiang, WANG Caixia, MIN Yong, et al. Overview on microgrid research[J]. Automation of Electric Power Systems, 2007, 31(19): 100-107.
[3] Holtz J, Lotzkat W, Werner K H. A high power multitransistor inverter uninterruptible power supply system[J]. IEEE Transactions on Power Electronics, 1998, 3(3): 278-285.
[4] Martins A P, Carvalho A S. Design and implementation of a current controller for the parallel operation of standard UPSs[C]//IEEE IECON 21st International Conference. Orlando, FL, USA: IEEE, 1995: 584-589.
[5] Sun X, Lee Y S, Xu D. Modeling, analysis, and implementation of parallel muti-inverter system with instantaneous average current sharing scheme[J]. IEEE Transactions on Power Electronics, 2003, 18(3): 844-856.
[6] Guerrero J M, HANG Lijun, Uceda J, et al. Control of distributed uninterruptible power supply systems[J]. IEEE Transactions on Industrial Flectronics, 2008, 55(8): 2845-2858.
[7] Tuladhar A, Jin H, Unger T, et al. Control of parallel inverters in distributed AC power systems with consideration of line impedance effect[J]. IEEE Transactions on Industry Electronics, 2000, 36(1): 131-138.
[8] Cheng P T, Chen C A, Lee T L, et al. A cooperative imbalance compensation method for distributed generation interface converters[J]. IEEE Transactions on Industry Applications, 2009, 45(2): 805-815.
[9] Engler A, Soultanis N. Droop control in LV-grids[C]// International Conference on Future Power Systems. Amsterdam, USA: IEEE, 2005: 1-6.
[10] Brabandere K D, Bolsens B, Keybus J V D. A voltage and frequency droop control method for parallel inverters[J]. IEEE Transactions on Power Electronics, 2007, 22(4): 1107-1115.
[11] LI Yunwei, Kao C N. An accurate power control strategy for power electronics interfaced distributed generation units operating in a low voltage multibus microgrid[J]. IEEE Transactions on Power Electronics, 2009, 24(12): 2977-2988.
[12] �Ŵ���, �¹���, ���, ��. һ��ȫ���ֻ���������ʽ��������Դ�����������Ʋ���[J]. �й��������ѧ��, 2006, 26(10): 63-66.
ZHANG Chunjiang, CHEN Guitao, ZU Feng, et al. An interactive following current sharing control strategy for single phase paralleled inverters in full digital[J]. Proceedings of the CSEE, 2006, 26(10): 63-66.
[13] ZHANG Chunjiang, CHEN Guitao, GUO Zhongnan, et al. Alternating master salve parallel control research for single phase paralleled inverters based on can bus[C]//Proceedings of IEEE IPEMC��06. Shanghai, China, 2006: 1-5.
[14] Coelho E A A, Cortizo P C, Garcia P F D. Small-signal stability for parallel-connected inverters in stand-alone AC supply systems[J]. IEEE Transactions on Industry Applications, 2002, 38(1): 533-542.
(�༭ �²ӻ�)
�ո����ڣ�2014-01-22�������ڣ�2014-04-25
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(61174125)(Project(61174125) supported by the National Natural Science Foundation of China)
ͨ�����ߣ������������ڣ����·ֲ�ʽ���缰���������Ƽ�����E-mail��hua_han@126.com
ժҪ�������������������ϵͳ�У����ڸ������֮�������迹�������迹���ڲ��죬��ˣ�Ӧ�ô�ͳ���´����Ʋ��Իᵼ��������������־��ȽϵͶ���ɻ������⡣Ϊ�˼�С���������������ľ��ȣ����һ�ָĽ����´����Ƶ����������ֲ��ԡ��÷������õʹ���ͨ�Ż�ȡ��Դ����������Ϣ��������ѹ�´��������ߵĵ�ѹƫ�ã��ﵽ������������侫�ȵ�Ŀ�ġ�ͬʱ��������Ļ������ɵ�ѹƫ��Ϊ�Ż�ָ���Ŀ�꺯�����Ż�����ƿ��Ʋ������о�����������Ľ��������ַ����ڲ�Ӱ���й����ʾ��ֵ������£����������Դ�����ʾ��ֵľ��ȣ����������õĶ�̬����̬���ܡ�
