
DOI: 10.11817/j.issn.1672-7207.2016.06.033
���ǽṹ������ʽ����Ԫ������Ϊ����
����1, 2������1����ѧ��2
(1. �㽭��ѧ �ռ�ṹ�о����ģ��㽭 ���ݣ�310058��
2. �㽭ʡ��������о�Ժ���㽭 ���ݣ�310006)
ժ Ҫ��
Ԫ�����α��ǵ�Ԫ�Ļ������ۣ��Ƶ������Ʒ���λ�ƿ��Ʒ��Ļ���ԭ����������ʽ����Ԫ�еĴ�����ʽ����ʵ�ֱ��ǽṹ�������ͺ�������Ϊ�������ڴ˻����ϱ��Ʊ��ǽṹ�����������������ͨ��������֤���о���������������Ƶ�����ʽ����Ԫ���ǵ�Ԫ����������ڱ��ǽṹ�ľ������������ͺ�������������֤�������Ƶ��������Ƴ������Ч�Ժ���ȷ�ԡ�������������������λ�ƿ��Ʒ�����ЧԽ��������ֵ�㣬���ٻ�ñ��ǽṹ��λ�ƴ�ת�����������������˶����ε�ȫ���̡�
�ؼ��ʣ�
���ǽṹ������ʽ����Ԫ�������α��ǵ�Ԫ�������ͺ�������λ�ƿ�������������
��ͼ����ţ�TU33 ���ױ�־�룺A ���±�ţ�1672-7207(2016)06-2058-07
Vector form intrinsic finite element method for buckling analysis of thin-shell structures
WANG Zhen1, 2, ZHAO Yang1, YANG Xuelin2
(1. Space Structure Research Center, Zhejiang University, Hangzhou 310058, China;
2. Zhejiang Province Institute of Architectural Design and Research, Hangzhou, Zhejiang 310006, China)
Abstract: Based on the basic theory of triangular thin-shell element of VFIFE, the basic principles of force-controlled method and displacement-controlled method were derived, and the corresponding processes of VIFIFE were presented. Then buckling and post buckling behavior for thin-shell structures were analyzed. On this basis, a computer program of the buckling analysis for triangular thin-shell element was developed and numerical examples were provided. The results show that the static and dynamic buckling and post buckling analysis can be well performed for thin-shell structures by the developed program, verifying the validity and the correctness of the theoretical derivation and the computer program. Without special processing, the buckling extreme point can be acrossed effectively by adopting displacement-controlled method, and the whole deformation of large deformation and large rotation, buckling and post buckling of thin-shell structures can be tracked.
Key words: thin-shell structures; vector form intrinsic finite element; triangle thin-shell element; buckling and post buckling; displacement-controlled method; force-controlled method
�����ͺ������DZ��ǽṹ�����е�һ��������⣬���о����ǽṹ������������²�����������ɥʧԭ��ƽ��ͳ��������Ĺ��̣��������м�ǿ�ļ��η�����ЧӦ��Ŀǰ���ڹ�����״���ǽṹ�������������н϶�������о��ɹ�[1-2]�����ݽṹʧ��ʱƽ��״̬�ı仯�����ɷ�Ϊ��֦��ʧ�Ⱥͼ�ֵ��ʧ�ȣ����ݼ��������ֿɷ�Ϊ����ʧ�ȺͶ���ʧ�ȣ���ͳ����Ԫ�����ڱ��ǽṹʧ��ȫ���̸��ٷ�������Ҫ�����������Ʒ���λ�ƿ��Ʒ��ͻ�������ALAMATIAN[3]����λ���������Ʒ�ʽ����϶����ɳڷ������ɻ�þ�ȷ�Ľṹ�������غͺ�������Ϊ����ֵ������������нϺõ������ٶȺͼ��㾫�ȡ������˵�[4]�������ʹ���غɡ�λ�Ʋ���ȷ������·�����ٽ���ص���ֵ����������������һ�㷽���д��ڵļ�ֵ�㴦�նȾ��������Ե�Ӱ�졣LEE��[5]�ڽṹ����·����Ԥ���У��2������ͬʱ������ʽ����ʽ��Newton-Raphson�㷨������˸Ľ�����-�Ժ���-����ϻ������������ٻ�ð���Ե����Կռ��ܵĺ�����ƽ��·����ZHOU��[6]ͨ������ƽ����������ֽ��2��������������������Ļ����������Ƶ��µ�Լ������������õ�ǰ���ز������ӣ�����˽ṹ�����Ͳ��������ķ����Է����������[7]����Koiter�ij�ʼ���������ۺ�Newton������������������ͨ���ڽ���ģ���������㶯�غɺ���·���ϵı���λ�ƣ�����ܹ��ڷ���������ƽ��·���ϵ�����λ��չ���㶯���Ӷ�ʵ���Զ����ٵĽ�����������ʽ����Ԫ(vector form intrinsic finite element��VFIFE)[8-10]�Ե�ֵ������������ѧ����Ϊ������ͨ��ţ�ٵڶ����������ʵ��˶���������ýṹ�ı��κ�Ӧ���������۱��������ڼ������Ժͷ����Ե����֣��˷��˴�ͳ����Ԫ�����ײ����ĸնȾ�������ͷ����Է��̵������������⣬�����ڽṹ��λ�ƴ�ת���������˶������ӽṹ��������ΪԤ����������ڽṹ�������⣬������������ֵ����ʵ�ţ���˶�����ʱ������������������Խ����ֵ�㣬ͨ���ṹ���εIJ������������ٻ���������ͺ�������Ϊ����������������ʽ����Ԫ�����α��ǵ�Ԫ�������ۣ��ֱ���������Ʒ���λ�ƿ��Ʒ������ٻ�ñ��ǽṹ�����ͺ��������ε�ȫ���̣��ڴ˻����ϱ��Ʊ��ǽṹ���������������ͨ�������Ͷ�����������������֤�����Ƶ��������Ƴ������Ч�Ժ���ȷ�ԣ�������2�ֿ��Ʒ������ص㼰��Ӧ�÷�Χ����̽�֡�
1 ����ʽ����Ԫ���ǵ�Ԫ��������
����ʽ����Ԫ�нṹ�����������ʵ��ϣ��ʵ����Ϊ�������ĵ�Ԫ���ӣ��������������α��ǵ�ԪΪ������CST��Ĥ��Ԫ��������DKT���嵥Ԫ�����Ե�����ɡ��ʵ��˶�����ƽ���ַ��̺�ת���� ���̣�
 (1)
(1)
ʽ�У�M��I�ֱ�Ϊ�ʵ�����������������x�ͦȷֱ�Ϊ��λ�ƺͽ�λ����������Ϊ��������� ��
�� �ֱ�Ϊ�ʵ�����ͺ������������±�ext��int�ֱ��ʾ����(��)������(��)��
�ֱ�Ϊ�ʵ�����ͺ������������±�ext��int�ֱ��ʾ����(��)������(��)��
ͨ����������ֵ����ʵ��˶�ʽ(1)ʱ���轫��ת��Ϊ�����ʽ��
����ʱ�������ʽΪ
 (2)
(2)
������ʱ�������ʽΪ
 (3)
(3)
ʽ�У���tΪʱ�䲽����M-1=1/m�� ��
�� ��
��
���¸�������ʽ����Ԫ�����α��ǵ�Ԫ����Ҫ�����̣���ϸ�Ƶ��ɲο�����[11]��
1.1 ��Ԫ�ڵ㴿������(��)λ�Ƽ���
���������˶������۳���Ԫ�ڵ�ȫλ���еĸ���ƽ�ƺ���ת�����Ӷ���ýڵ㴿������(��)λ�ƣ���ʽ(4)��ʾ������ƽ�ƿ�ȡһ�ο��ڵ����λ�ƣ�����ת���������������ת������ͨ����Ԫ����(��)����ת�������Ͷ�Ӧ����(��)����ת�������������á����������α��ǵ�Ԫ���ʵ�λ�Ƶĺϲ��ͷ���Ϊ����������ϵ�µ�Ԫ���ڵĽڵ���λ�Ʒ�����ΪĤԪ���ֵ�λ�Ʒ���������ڵ���λ�ƺͽ�λ�Ʒ�����Ϊ��Ԫ���ֵ�λ�Ʒ�����
 (4)
(4)
ʽ�У� (
( )Ϊ��������(��)λ�ƣ�
)Ϊ��������(��)λ�ƣ� Ϊ����ƽ�ƣ�
Ϊ����ƽ�ƣ� (
( )Ϊ����ת����(��)λ�ƣ��±�op��ip�ֱ��ʾ��������ڡ�
)Ϊ����ת����(��)λ�ƣ��±�op��ip�ֱ��ʾ��������ڡ�
1.2 ��Ԫ�ڵ�����(��)����
���ڱ��ǵ�Ԫ�ı����鹦���̣��ɵ�Ԫ�ڵ㴿������(��)λ����ⵥԪ�ڵ�����(��)����ʽ(5)��ʾ�����뵥Ԫ��������ϵ�ʹ�ͳ����Ԫ��Ԫ�κ������ڵ�Ԫƽ������ⵥԪ�ڵ�����(��)������ͨ������ת��������(��)����ת��������ת��Ϊ��������ϵ������(��)������������������ʵ��ϲ����м��ɼ��õ���Ԫ�����ʵ������(��)���������������α��ǵ�Ԫ���ʵ������ĺϲ��ͷ���Ϊ���ڵ���λ�� ��
�� ����ĤԪ���ֵĽڵ��������㣬�ڵ��λ��
����ĤԪ���ֵĽڵ��������㣬�ڵ��λ�� ��
�� ���ڰ�Ԫ���ֵĽڵ��������㡣
���ڰ�Ԫ���ֵĽڵ��������㡣
 (5)
(5)
ʽ�У����ֱ�Ϊ�ڵ���λ�ƺͽ�λ�ƣ� ��
�� �ֱ�Ϊ�ڵ������������أ�
�ֱ�Ϊ�ڵ������������أ� ��
�� �ֱ�ΪӦ��������Ӧ�����±�m��b�ֱ��ʾĤԪ�Ͱ�Ԫ���֡�
�ֱ�ΪӦ��������Ӧ�����±�m��b�ֱ��ʾĤԪ�Ͱ�Ԫ���֡�
1.3 Ӧ��Ӧ��ת������
�����ԽṹӦ����Ӧ��������ʱ�������Ӧ��Ӧ��ת�����㣬��ʽ(6)��ʾ������ÿ��ʱ�䲽��Ӧ���������ǻ��ڸ��Բ�ͬ�ı�������ϵ�»�ã������һ��ĩ��������ϵ��Ӧ����ͨ������ת�����������(��)����ת������ת������������ϵ�£���ת������һ������������ϵ�£���ʵ��Ӧ������ѭ�����㡣���������α��ǵ�Ԫ�������ĤԪ���ֺͰ�Ԫ���ֵ�Ӧ��Ӧ�����ʽ���Ӧ��Ӧ��ĺϲ��ͷ��롣
 (6)
(6)
ʽ�У� Ϊ����ת������
Ϊ����ת������ Ϊ����ת������
Ϊ����ת������ ��
�� �ֱ�Ϊ��ʼӦ���ͳ�ʼӦ�䣻
�ֱ�Ϊ��ʼӦ���ͳ�ʼӦ�䣻 ��
�� �ֱ�Ϊ��������ϵ��Ӧ��������Ӧ��������
�ֱ�Ϊ��������ϵ��Ӧ��������Ӧ��������
2 �����Ʒ���λ�ƿ��Ʒ��Ĵ���
�����Ʒ���λ�ƿ��Ʒ��Ǹ��ٻ�ñ��ǽṹ�����ͺ�����ȫ���̵�2�ֻ������������¸��������ԭ����������ʽ����Ԫ�е�ʵ�ַ�ʽ��
2.1 �����Ʒ�
�����Ʒ������ı仯��Ϊ�Ա�������ѭ��֪�ṹ�������λ�Ʒ�Ӧ��һ��˼·����ʩ����֪�仯��������ͨ������ʵ��˶�ʽ(1)��ֱ�ӻ���������õ������λ�õ��λ�Ʊ仯�����������λ��ʽ(2)��(3)��Ϊ�����Ʒ��̣�
 (7)
(7)
��ÿ��ѭ���������У�ͨ���������� (
( )������������ṹ�ڸ÷�����ĩʱ�̵�λ�Ʒ�Ӧ
)������������ṹ�ڸ÷�����ĩʱ�̵�λ�Ʒ�Ӧ (
( )�����������������ڵ�Ԫ������С���δ��λ�ļٶ��������ʼ����������ͨ����������ȷ�������豣֤�����ýڵ�λ������С�ڵ�Ԫ���ta������(��ta/10)��
)�����������������ڵ�Ԫ������С���δ��λ�ļٶ��������ʼ����������ͨ����������ȷ�������豣֤�����ýڵ�λ������С�ڵ�Ԫ���ta������(��ta/10)��
2.2 λ�ƿ��Ʒ�
λ�ƿ��Ʒ���λ�Ƶı仯��Ϊ�Ա������������Ʒ��෴������ѭ��֪�ṹλ���������������˼·���ڽṹλ�ƿ��Ƶ㴦�������֧����ʩ����֪�仯��֧��λ�ƺ�������ͨ��ʽ(2)��(3)������ʽ�����֧������(����Ӧ����)��������ʱ������ʽ��Ϊλ�ƿ��Ʒ��̣�
 (8)
(8)
��ÿ��ѭ�����������У�ͨ������λ�ƿ��Ƶ㴦֧��λ��x(��)������������ṹ�ڸ÷����������� (
( )����ʼλ��������ȡС�ڵ�Ԫ���ta������(��ta/10)�����㵥ԪС���δ��λ�ٶ����Ӷ��ɱ��ⵥԪ�����ι�������µı��μ���ʧ�档
)����ʼλ��������ȡС�ڵ�Ԫ���ta������(��ta/10)�����㵥ԪС���δ��λ�ٶ����Ӷ��ɱ��ⵥԪ�����ι�������µı��μ���ʧ�档
3 ����ʵ�ּ���������
�ڴ�ͳ����Ԫ�У��ṹ�����ͺ���������һ�����ִ�λ�ơ���ת�����Ӧ�䣬���ƽ�ⷽ��ʱΪ���DZ��ε�Ӱ��Ӧ�Ա��κ���״Ϊ�������Σ�����Ϊ���η�����������������������ʽ����Ԫ�����������ڼ������Ժͷ����Ե����֣���ÿһʱ���Ӳ��ھ�ΪС���δ��λ���̣�������Ա���ǰ��״Ϊ�������Σ����ڽṹ����������������������������ʽʱ����ֽ��в������±�ɻ�ýṹ��Ӧ���ͱ��Ρ�
��������ʽ����Ԫ�����α��ǵ�Ԫ�������ۺ�λ��(��)���ƴ������������IJ���Matlab�����˱��ǽṹ������������������ֱ�ͨ�������Ͷ�����������������֤�����Ƶ��������Ƴ����ڱ��ǽṹ�����Ͷ������������������Ч�Ժ���ȷ�ԣ�����ʵ��������ͼ1��ʾ��
3.1 ����ǵľ�����������
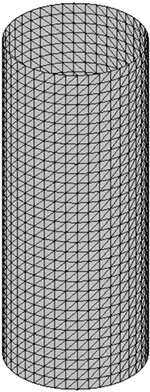
����֧������ǽṹ�Ƿ���ԾԽʧ������ľ�������[7, 12]������λ�ƿ��Ʒ��������Ʒ����ٱ��ǽṹ�����ͺ��������ε�ȫ���̡�����ǵİ뾶R= 2.54 m��������߱߳�L=0.508 m�����ta=12.7 mm�������Ƚ�Ϊ��=0.2 rad����ʼ�������֧����Բ���������ɣ������������к���P���ã�����ĵ���ģ��E=3.102 75 GPa�����ɱȦ�=0.3���ܶȦ�= 2 500 kg/m3�����������α��ǵ�Ԫ������200����Ԫ��121���ڵ㣬�ṹģ����ͼ2��ʾ������ʱ�䲽��ȡh=2.0��10-5 s���������ȡ��=36(������[13]����������)��
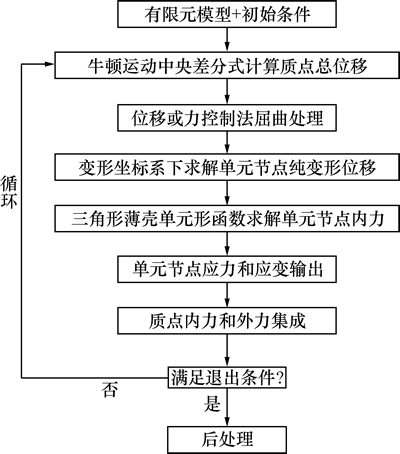
ͼ1 ���ǽṹ������������ͼ
Fig. 1 Buckling analysis flow chart for thin-shell structures
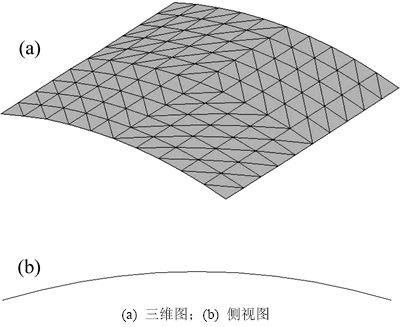
ͼ2 �����ģ�ͼ�������
Fig. 2 Cylindrical shell model and model meshing
ͼ3��ʾΪ�����P�涥�����Ľڵ�����λ�Ʀĵı仯���ߣ���������[12]������бȽϡ���ͼ3�ɼ���λ�ƿ��Ʒ��������������ϽϺã��ɹ��������Ǵ�λ�ƴ�ת������������������ȫ���̱仯���ߣ���������ǰ�����Ρ��������½��μ����������������Σ����ķ���������ϡ����ٽ缫���طֱ�Ϊ2.23 kN��0.53 kN��������[12]���(2.21 kN��0.56 kN)���������Ϊ0.90%��5.36%�������Ʒ��������ͺ����������ξ�����������ϣ����������½������ں��ص�����ʩ�ӱ���Ϊ���ٵ�������(����þ�ȷ���ٽ缫����)���������½��κ����ڸö�λ�Ʊ仯���죬�ں�����������ʼ������С����ЧӦ��
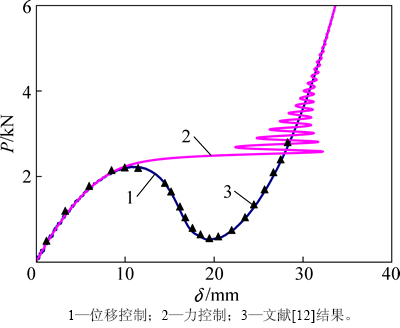
ͼ3 ���Ľڵ�ĺ���-λ������
Fig. 3 Load-displacement curves of central node
ͼ4��ʾΪ��������ʱ������������ͺ������ı��κ�MisesӦ���ֲ���ͼ(Matlab���������б��Ƴ�����ƻ��)���Ը���ֱ�۵ع۲���Ӧ���仯�����η�չ������ɼ������ſ���λ�Ƶĵ���ʩ�ӣ���������ĵı���Ҳ������λ��Ϊ10.8 mmʱ�ﵽ��ֵ����������������ʼ�������ٷ�ת(��Ӧ����-λ�Ƶ��½���)��λ��Ϊ19.4 mm�����½��εļ�Сֵ�㣻֮������DZ����ٴλ�������(��Ӧ��������������)��
3.2 Բ���ǵĶ�����������
����������λ�ƿ��Ʒ�����Բ�����ǽṹ����ѹ���������µĶ��������ͺ���������[14-15]��Բ���ǵİ뾶R=0.1 m������L=0.5 m�����ta=2.0 mm����ʼ�˹̶������˽����������ɶȲ���ǿ����λ�ƿ�����ʽ���м��أ�ʹ�ö˽�����40 m/s���ٶ���������ѹ��λ�ƣ�����ĵ���ģ��E=201 GPa�����ɱȦ�=0.3���ܶȦ�=7 850 kg/m3�����������α��ǵ�Ԫ������2 560����Ԫ��1 320���ڵ㣬�ṹģ����ͼ5��ʾ������ʱ�䲽��ȡh=1.0��10-6 s(��Ӧλ����������Ϊ4.0��10-5 m)���������ȡ��=0(������������ЧӦ)��
ͼ6��ʾΪ���˵�����ѹ����P������λ�Ʀĵı仯���ߣ�����ABAQUS���������бȽϡ���ͼ6�ɼ���λ�ƿ��Ʒ���ǰ3�������������ABAQU���ϽϺã���3������֮��ʼ���ֲ��죬���ܵı仯�����Ի���һ�¡����ķ�����õ�ǰ3���������طֱ�Ϊ2 286.9��6 125.0��6 888.7 kN����ABAQUS���(�ֱ�Ϊ2 252.7��5 565.0��6 870.1 kN)���������Ϊ1.50%��9.14%��0.27%����֤�˱��ķ����ڱ��ǽṹ�������������е���Ч�Ժ�ȷ�ԡ�
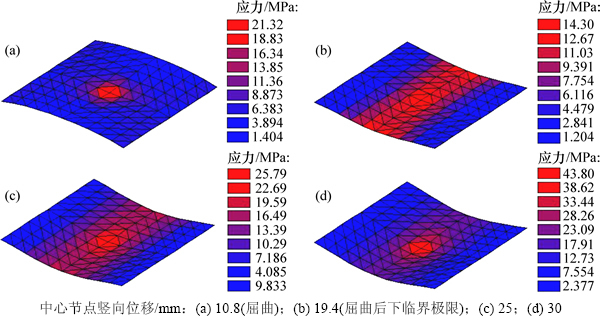
ͼ4 ���������ͺ���������
Fig. 4 Static buckling and post buckling deformation diagrams
ͼ5 Բ������ģ�ͼ�������
Fig. 5 Cylindrical shell model and model meshing
ͼ7��ʾΪ��������ʱ��Բ�����������ͺ������ı��κ�MisesӦ���ֲ���ͼ����ͼ7�ɼ������ſ���λ�Ƶĵ���ʩ�ӣ����������Ƕ��˳��־ֲ�����(��1������ģ̬)�����������ǵ˳��־ֲ�����(��2������ģ̬)��֮��ĸ߽�������ʼ����չ����������(��������ģ̬)��
���ڱ�������ʽ����Ԫ���������ʵ㶯�����������ۻ������ڱ��ǽṹ�������������и�Ϊ���ã������ͺ���������ͨ�������д���δ�ת�����÷��˷��˴�ͳ����Ԫ�����ײ����ĸնȾ�����ͷ����Է��̵������������⣬ͨ���ṹ���εIJ������¿������ٻ���������ͺ�������Ϊ����Դ�ͳ����Ԫ�����Ϊȷ��Ѹ�١�
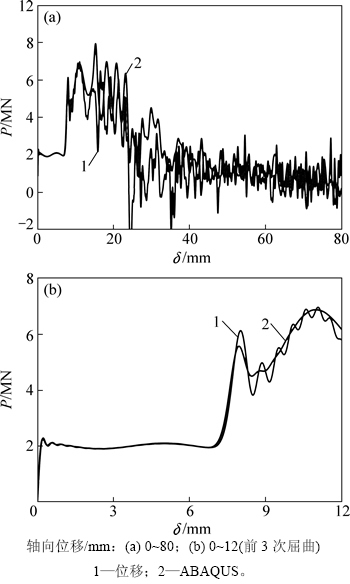
ͼ6 ��������ѹ����-λ������
Fig. 6 Top total axial load-displacement curves
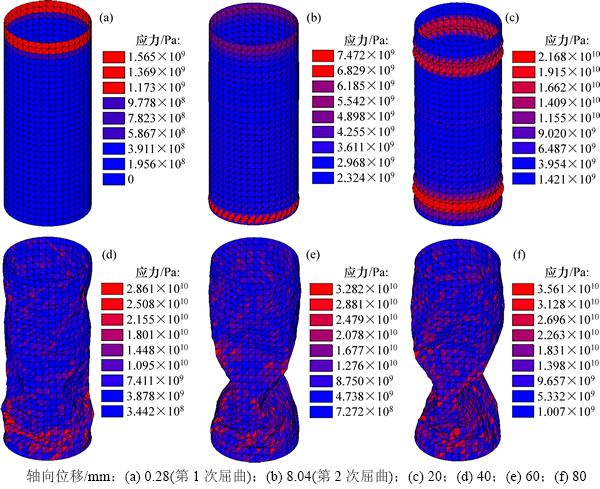
ͼ7 ���������ͺ���������ͼ
Fig. 7 Dynamical buckling and post buckling deformation diagrams
4 ����
1) ��������ʽ����Ԫ�����α��ǵ�Ԫ�Ļ������ۣ��Ƶ��������Ʒ���λ�ƿ��Ʒ��Ļ���ԭ����������ʽ����Ԫ�еĴ�����ʽ����ʵ�ֱ��ǽṹ�������ͺ�������Ϊ������
2) �����˱��ǽṹ���������������������������֤�������������������Ƴ���ɺܺõ���ɱ��ǽṹ�ľ������������ͺ�������������֤�������Ƶ��������Ƴ������Ч�Ժ���ȷ�ԡ�
3) ����λ�ƿ��Ʒ�����Ч���ٱ��ǽṹ�˶����ε�ȫ���̣�����ñ��ǽṹʧ�Ⱥ���½��κ;�ȷ���ϡ����ٽ缫���أ��������Ʒ������λ�Ƶ��½������ں�����������ʼ�����С���ȵ���ЧӦ��
4) ������λ�õ�ͬʱ���ں��غ�λ�Ƶ��½���ʱ���������Ϊ���Ļ������ſɻ��ȷ�ĺ���-λ�����ߣ����Ľ����н�һ���о���
�ο����ף�
[1] TENG J G, ROTTER J M. Buckling of thin metal shells[M]. London: Spon Press, 2004: 1-41.
[2] ɳ���. Բ���ǵĶ����������ۼ���Ӧ��[M]. ����: �й����Ĺ�ҵ������, 2008: 62-89.
SHA Fenghuan. Theory and application of dynamic bucking of cylindrical shells[M]. Beijing: China Building Materials Press, 2008: 62-89.
[3] ALAMATIAN J. Displacement-based methods for calculating the buckling load and tracing the post-buckling regions with dynamic relaxation method[J]. Computer & Structures, 2013, 114: 84-97.
[4] ������, Ҷ��. ���Ǻ������������غ�-λ�ƽ�����Ʒ�[J]. �Ϻ���ͨ��ѧѧ��, 1990, 24(3): 38-44.
LIU Zhengxing, YE Rong. Alternatively controlling technique of load and displacement for post-buckling analysis of thin shells[J]. Journal of Shanghai Jiaotong University, 1990, 24(3): 38-44.
[5] LEE K, HAN S E, HONG J W. Post-buckling analysis of space frames using concept of hybrid arc-length methods[J]. International Journal of Non-linear Mechanics, 2014, 58: 76-88.
[6] ZHOU L Y, LI Q, LI T M, et al. Improved arc-length method for solving buckling problem[J]. Journal of Southwest Jiaotong University, 2011, 46(6): 922-925.
[7] ����, ����, GURDAL Z. �ṹ��������������������Ԫ������[J]. ����������ѧѧ��(��Ȼ��ѧ��), 2013, 41(2): 105-110.
LIANG Ke, SUN Qin, GURDAL Z. Finite element-based order reduction method for nonlinear buckling analysis of structures[J]. Journal of South China University of Technology (Natural Science Edition), 2013, 41(2): 105-110.
[8] TING E C, SHIH C, WANG Y K. Fundamentals of a vector form intrinsic finite element: part I. Basic procedure and a plane frame element[J]. Journal of Mechanics, 2004, 20(2): 113-122.
[9] TING E C, SHIH C, WANG Y K. Fundamentals of a vector form intrinsic finite element: part II. Plane solid elements[J]. Journal of Mechanics, 2004, 20(2): 123-132.
[10] WU T Y, WANG C Y, CHUANG C C, et al. Motion analysis of 3D membrane structures by a vector form intrinsic finite element[J]. Journal of the Chinese Institute of Engineers, 2007, 30(6): 961-976.
[11] ����, ����, ����. ��������ʽ����Ԫ�������α��ǵ�Ԫ�о�[J]. �����ṹѧ��, 2014, 35(4): 64-70.
WANG Zhen, ZHAO Yang, HU Ke. Triangular thin-shell element based on vector form intrinsic finite element[J]. Journal of Building Structures, 2014, 35(4): 64-70.
[12] HORRIGMOE G, BERGAN P G. Nonlinear analysis of free-form shells by flat finite element[J]. Computer Methods in Applied Mechanics and Engineering, 1978, 16(1): 11-35.
[13] ����, ����, ����. ��������ʽ����Ԫ�������α��嵥Ԫ�о�[J]. ������ѧ, 2014, 31(1): 37-45.
WANG Zhen, ZHAO Yang, HU Ke. Triangular thin-plate element based on vector form intrinsic finite element[J]. Engineering Mechanics, 2014, 31(1): 37-45.
[14] ��С��, ���. �������غ���Բ���Ƕ��������ļ��������[J]. ��е��������, 2008, 23(1): 77-78.
XING Xiaodong, HOU Fei. The computer simulation on dynamic buckling of cylindrical shells under axial impulsive load[J]. Mechanical Management and Development, 2008, 23(1): 77-78.
[15] ��˧. ����غ���Բ���Ƿ����Զ�����������ֵ�о�[D]. ����: ����������ѧ������е�밲ȫѧԺ, 2005: 46-72.
LI Shuai. Numerical research for nonlinear dynamic buckling of shell under axial impacted load[D]. Dalian: Dalian University of Technology. School of Chemical Machinery and Safety Engineering, 2005: 46-72.
(�༭ �Կ�)
�ո����ڣ�2015-06-15�������ڣ�2015-09-03
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51378459)(Project(51378459) supported by the National Natural Science Foundation of China)
ͨ�����ߣ����������ڣ���ʿ����ʦ�����±��ǽṹ���ֽṹ������ʽ����Ԫ�о���E-mail��ceyzhao@zju.edu.cn
ժҪ����������ʽ����Ԫ�����α��ǵ�Ԫ�Ļ������ۣ��Ƶ������Ʒ���λ�ƿ��Ʒ��Ļ���ԭ����������ʽ����Ԫ�еĴ�����ʽ����ʵ�ֱ��ǽṹ�������ͺ�������Ϊ�������ڴ˻����ϱ��Ʊ��ǽṹ�����������������ͨ��������֤���о���������������Ƶ�����ʽ����Ԫ���ǵ�Ԫ����������ڱ��ǽṹ�ľ������������ͺ�������������֤�������Ƶ��������Ƴ������Ч�Ժ���ȷ�ԡ�������������������λ�ƿ��Ʒ�����ЧԽ��������ֵ�㣬���ٻ�ñ��ǽṹ��λ�ƴ�ת�����������������˶����ε�ȫ���̡�
[1] TENG J G, ROTTER J M. Buckling of thin metal shells[M]. London: Spon Press, 2004: 1-41.
[2] ɳ���. Բ���ǵĶ����������ۼ���Ӧ��[M]. ����: �й����Ĺ�ҵ������, 2008: 62-89.
[4] ������, Ҷ��. ���Ǻ������������غ�-λ�ƽ�����Ʒ�[J]. �Ϻ���ͨ��ѧѧ��, 1990, 24(3): 38-44.
[11] ����, ����, ����. ��������ʽ����Ԫ�������α��ǵ�Ԫ�о�[J]. �����ṹѧ��, 2014, 35(4): 64-70.
[13] ����, ����, ����. ��������ʽ����Ԫ�������α��嵥Ԫ�о�[J]. ������ѧ, 2014, 31(1): 37-45.
[14] ��С��, ���. �������غ���Բ���Ƕ��������ļ��������[J]. ��е��������, 2008, 23(1): 77-78.
[15] ��˧. ����غ���Բ���Ƿ����Զ�����������ֵ�о�[D]. ����: ����������ѧ������е�밲ȫѧԺ, 2005: 46-72.
