
DOI: 10.11817/j.issn.1672-7207.2017.06.016
���ڵ�Ż�е��������ƶ�ϵͳ���ƶ����������
���Ҹ�1������ҵ1����¶1, 2���Խ���1���γ�Ȼ1
(1. �й�ũҵ��ѧ ��ѧԺ��������100083��
2. ���ɹŴ�ѧ ��ͨѧԺ�����ɹ� ���ͺ��أ�010070)
ժ Ҫ��
�������ƶ��IJ��㣬���һ�����͵�Ż�е��������ƶ�ϵͳ(electromagnetic-mechanical coupled regenerative braking system��EMCB)����������ж���ѧ��������ϻ����о�������EMCBϵͳ�������ƶ��������������һ���ƶ���������ԣ�����EMCBϵͳģ�ͺͿ��Ʋ��Է���ϵͳ��Ӧ��CarSim&Simulink���Ϸ���ƽ̨�����С������ʿ��ƵĽ����ƶ�����Ϊ�������ƶ��ܻ��ա��ƶ��ȶ��Ժ��ƶ������ԵȽ��жԱ��о�����֤�������о������������������ƶ���������Բ���ʵ���е��ƶ�ǿ����ʵ���ƶ�����������������I���߸߶��Ǻϣ���������ƶ�ǿ�����ƶ�Ч�ܵ�������֤���ƶ��ȶ��Ժ��ƶ������ԣ����������������Ч�ʣ���Ч�����˵綯��������ʻ��̣�Ϊ��һ��������õķ������ƶ�ϵͳ(ABS)�������ƶ�������ϵͳ(EBD)�������ȶ�ϵͳ(ESP)�ȿ������ܵ춨�˻�����
�ؼ��ʣ�
�綯����������ƶ�������ƶ����ƶ����������ƶ��ܻ�����
��ͼ����ţ�U469.72 ���ױ�־�룺A ���±�ţ�1672-7207(2017)06-1530-08
Braking force distribution strategy based on electromagnetic-mechanical coupled regenerative braking system
ZHANG Zhongfu1, WANG Guoye1, ZHANG Lu1, 2, ZHAO Jianzhu1, HE Changran1
(1. College of Engineering, China Agricultural University, Beijing 100083, China;
2. Transportation Institute, Inner Mongolia University, Hohhot 010070, China)
Abstract: For the deficiency of current electric vehicle regenerative braking, a new design of electromagnetic- mechanical coupled regenerative braking (EMCB) system was proposed, and the coupled mechanism was analyzed. A braking force distribution strategy was proposed based on EMCB system and curve of ideal braking force distribution, and the dynamic model of EMCB and control strategy were established by Matlab/Simulink. The braking energy recovery, braking stability and braking comfort were studied, contrasted and simulated with the co-simulation platform of CarSim&Simulink during normal braking and emergency braking with or without slip control. The results show that the strategy not only can realize practical braking force distribution curve which agrees with I-curve well under low and middle braking strength, but also meet brake efficiency under high braking strength. The braking force distribution strategy ensures braking stability and braking comfort, which can maintain a high recovery efficiency and increase the driving range of electric vehicles effectively. Further, the strategy lays a foundation for obtaining good control performance of antilock brake system (ABS), electronic brakeforce distribution (EBD) and electronic stability program (ESP), etc.
Key words: electric vehicles; electromagnetic braking; coupled braking; braking force distribution; braking energy recovery
�綯���������ǽ��������Դ����Ⱦ�������Ч;���������ƶ���ʵ�ָ�Ч�ƶ��ܻ��գ��������������[1-3]����ͳ�ƣ������ڳ��й�������ʻʱ��Լ��50%�������������ƶ���������ʧ[4-5]������������Լ��20%��������ʧ[6]����ˣ�����ƶ��ܻ���Ч�ʶԽ����ܺġ����ӵ綯������ʻ��̾�����Ҫ����[7-8]�����е綯�����ƶ��ܻ��ռ���ͨ������2�������ƶ�ϵͳ����Ħ���ƶ�ϵͳ�͵�������ƶ�ϵͳ[9-12]�����У�Ħ���ƶ�ϵͳ��Ҫ��������Һѹ�ƶ�(EHB)�������ƶ�ϵͳ(EMB)�͵���Ш��բ(EWB)���ƶ���ʽ����EHB��ȣ�EMB��EWB �Ķ����ԡ���Ӧ�Ը���[13-14]������Ħ���ƶ�ϵͳ���������ƶ�ϵͳ�����������ϵͳ������Э�������Ѷȴ����Ĵٶ��ܡ�ϵͳ�ṹ���ӡ����������ʵ͡����Ʋ����ࡢ�����ƶ��������Ա�֤������[5, 15]������[16]���һ��EMB���ƶ��ܻ������ϵķ��������ƶ������и��ݼ�ʻԱ���ƶ���ͼ����������ƶ����յ�����ֱ����ΪEMB�Ĵٶ��ܡ���Ȼ�÷�ʽ��������������·����������ƶ��ܻ����ʣ���2���ƶ�ϵͳ��Ȼ��������ġ�������е綯�����ƶ�ϵͳ���ڵ����⣬�������������ִ��Ƚ��Ļ�����Ƽ��������һ�����͵�Ż�е��������ƶ�ϵͳ������EMB�������ƶ����ŵ㣬�˷�2���ƶ�ϵͳ�������ȱ�㣬�ڵ���ƶ�����������ͬʱ���ٶ�Ħ���ƶ���ʵ�ֵ�Ż�е��������ƶ���
1 ��Ż�е��������ƶ�ϵͳ
���EMB�������ƶ����ŵ�[17]�����ݻ����硢���������û����������˻�����챵���ĵ�Ż�е��������ƶ�ϵͳ���ṹ��ͼ1��ʾ��EMCBϵͳ��Ҫ�ɵ���ƶ�ϵͳ��Ħ���ƶ�ϵͳ2������ɡ�����ƶ�ϵͳ�ɳ���1������װ��2�����ת��3���������4����ɣ�Ħ���ƶ�ϵͳ�ɻ�������5���ݸ�6����ĸ7�������8���������9��ĤƬ����10���ƶ�ǯ11���ƶ���12����ɡ�
�ƶ�ʱ��������ڷ���״̬��������������Ƶ����������Ϊ���װ�ó�磬���ת��3�͵������4֮������ĵ��ת��ͨ������װ��2�ӵ��ת��3���ݵ�����1���谭����ת����ʹ���ֺ͵�������ƶ��������ڵ�����ӡ�ת��֮��ĵ��ת�ػ�Ϊ�������ͷ�����������ˣ��õ��ת��ͨ����������4�̽�Ļ�������5���ݵ��ݸ�6����������5�����ڹ̶���13�ϣ��ݸ�6�뻨������5ͨ������������ϣ��ݸ�6����ĸ7������������ϣ������8������ĸ7ת��ʹ����������ˣ���������5�����ݸ�6����ĸ7�������������Ҷ��������9����������λ�ƣ���ĸ7���ݸ�6ֻ���ƶ�����������9�����ƶ���
�ڵ��ƶ�ǿ���£���С�ĵ��ת�ز����������������˷�ĤƬ����10�ĵ����������������������9���ƶ�ǯ11֮��ļ�϶����ˣ��ƶ���12�����н��Բ���Ħ��ת�أ�EMCBϵͳ�����ڵ���ƶ�ģʽ����ͼ2��ʾ��
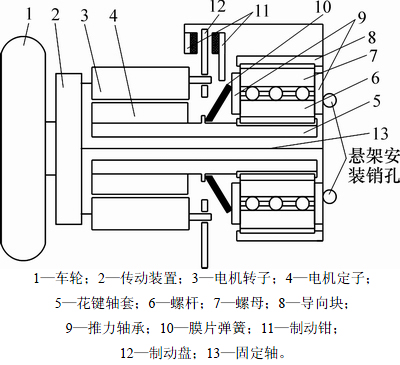
ͼ1 ��Ż�е��������ƶ�ϵͳ�ṹͼ
Fig. 1 Structure of electromagnetic-mechanical coupled regenerative braking system
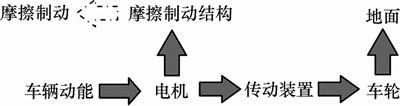
ͼ2 ����ƶ�ģʽ
Fig. 2 Electromagnetic braking mode
���и��ƶ�ǿ���£��ϴ�ĵ��ת�ز��������������ܹ��˷�ĤƬ����10�ĵ������������������9���ƶ�ǯ11֮��ļ�϶���ƶ��ƶ�ǯ11�н��ƶ���12����Ħ��ת�أ���ͨ�����������ڵ��ת��3�ϣ�����ת��3�ĵ��ת���γ��ƶ����ֵ�����ƶ�ת�أ�EMCBϵͳ����������ƶ�ģʽ����ͼ3��ʾ��
��Ż�е��������ƶ�ϵͳΪ�����ƶ���Ħ���ƶ���������߿�ϵͳ�����õ��ܻ�����������ƶ�ת�أ�ͬʱ����ƶ�ת�ز���Ħ���ƶ��Ĵٶ��������ڲ����Ķ���Ħ���ƶ��ٶ��ܵ������ʵ��Ħ���ƶ�������ƶ���Ħ���ƶ��γɵ�Ż�е���ϵͳ����ͬ����ʵ�ֳ����ƶ���
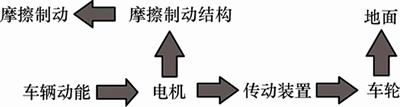
ͼ3 ����ƶ�ģʽ
Fig. 3 Coupled braking mode
2 EMCBϵͳ����ϻ���
����Ķ������ݸ˻������̶����ӣ����ת���붨�ӵ��������ͨ������װ���ƶ����֣�ͬʱͨ����������������������װ�ã���ˣ������¹�ϵ��
 (1)
(1)
ʽ�У� ��
�� ��
�� �ֱ�Ϊ���ת�ӻ�е���ٶȡ����ֽ��ٶȺ��ݸ˽��ٶȣ�rad/s��T1��TL��Tbe�ֱ�Ϊ�����������ء�����ƶ����ء�����ƶ�ת�أ�N��m��icΪ����װ�õĴ����ȡ�
�ֱ�Ϊ���ת�ӻ�е���ٶȡ����ֽ��ٶȺ��ݸ˽��ٶȣ�rad/s��T1��TL��Tbe�ֱ�Ϊ�����������ء�����ƶ����ء�����ƶ�ת�أ�N��m��icΪ����װ�õĴ����ȡ�
����Ĺ��������Ҫ����ͭ�ġ��������������Լ�Ħ�����[18]�����Ч�ʷ���Ϊ
 (2)
(2)
ʽ�У� Ϊ���Ч�ʣ�Te��Tf�ֱ�Ϊ���ת�غ�Ħ��ת�أ�N��m��PCu��PFe��Pinv�ֱ�Ϊͭ�ġ�������������[7, 18]��
Ϊ���Ч�ʣ�Te��Tf�ֱ�Ϊ���ת�غ�Ħ��ת�أ�N��m��PCu��PFe��Pinv�ֱ�Ϊͭ�ġ�������������[7, 18]��
 (3)
(3)
Ra��Rc�ֱ�Ϊ�������衢�����Ч���裬����LaΪ������У�H��kfΪ����������Ĵ�����Wb��pΪ�����������k1��k2Ϊ��������ϵ����
��Ż�е��������ƶ�ϵͳ�ĺ��IJ�������������װ�ã���ͼ4��ʾ����ͼ4������ͼ1���������4ͨ����������5�����ݸ�6ת�����ݸ�6�����滨����ת�������ػ����Ử������ĸֻ���ص����������
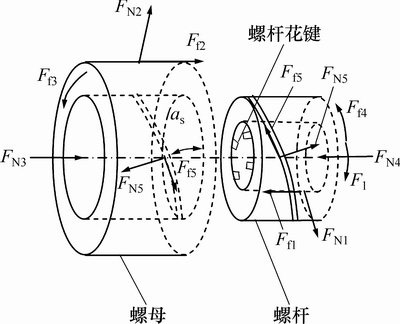
ͼ4 ��ĸ�ݸ˻�������ʾ��ͼ
Fig. 4 Dynamic models of screw and nut
ͼ4�У�T1Ϊ�����������أ�N��m��FN1��FN2��FN3��FN4��FN5�ֱ�Ϊ�ݸ˻����Ӵ��淨��������ĸ�����Ӵ��淨��������ĸ����ѹ�����ݸ˶���ѹ�����ݸ���ĸ�����ƽӴ��淨������N��Ff1��Ff2��Ff3��Ff4��Ff5�ֱ�Ϊ������Ӧ����������Ħ����Ħ������N����sΪ�ݸ˵��̽ǣ�rad����������������װ�ö���ѧ����Ϊ
 (4)
(4)
ʽ�У�f1��f2��f3��f4��f5�ֱ�Ϊ������Ӧ����������Ħ����Ħ��������Rc1��Rc2��Rc3��Rc4��Rc5�ֱ�Ϊ�ݸ˻��������ϰ뾶����ĸ�����뾶����ĸ�������Ħ���뾶���ݸ˶������Ħ���뾶���ݸ���ĸ�����ϰ뾶��m��JLg��JLm�ֱ�Ϊ�ݸˡ���ĸ��ת��������kg��m2����Lg�ͦ�Lm�ֱ�Ϊ�ݸˡ���ĸ�Ľ��ٶȣ�rad/s��
��EMCBϵͳ�Ľṹԭ����֪����������װ�õ��˶����dz�С������ʽ(1)��(4)�������������̿ɼ�Ϊ
 (5)
(5)
ʽ�У�FNΪ�ݸ˻���ĸ������������N�� Ϊ����Ħ���ǣ�
Ϊ����Ħ���ǣ� ��rad����1Ϊ��������װ�õĻ�еЧ�ʡ�
��rad����1Ϊ��������װ�õĻ�еЧ�ʡ�
���������������Կ˷����ɵ��������ƶ���϶ʱ�����������뵯�ɵ�����Ϊ�������ͷ���������Ħ���ƶ������룻�����������ﵽĤƬ���ɵķ�ֵ��Fs0ʱ���ƶ���϶��ȫ�����������������ļ����������������뵯�ɵ������ٻ�Ϊ�������ͷ���������Ħ���ƶ���ʼ�����á���ˣ��ƶ�ѹ���������������������Ĺ�ϵ�ɱ���Ϊ
 (6)
(6)
ʽ�У�FcΪ�������ƶ����ϵ�ѹ����N��Fs0Ϊ�ƶ���϶��ȫ����ʱ��Ӧ��ĤƬ���ɵ�������N��FsΪĤƬ���ɵ�������N��
����ƶ�����TLͨ����������װ�ò����ƶ�ѹ��Fc������Ħ�����ϣ�Ħ��ת��ͨ�����������ڵ��ת���ϣ�����ͨ������װ�ò���Ħ���ƶ�ת��Tbc�������ƶ�ת��һͬ����EMCBϵͳ�����ƶ����أ�
 (7)
(7)
ʽ�У�TuΪ���ƶ����أ�N��m��TbcΪĦ���ƶ�ת�أ�N��m��RpΪ�ƶ�ѹ�����ð뾶��m����cΪ�ƶ���Ħ��������
����ʽ(1)��(5)��(7)�ɵ����ƶ����ط���Ϊ
 (8)
(8)
������������ϵ�� ��������ϵ��
��������ϵ�� �����ƶ����ط��̿ɱ���Ϊ
�����ƶ����ط��̿ɱ���Ϊ
 (9)
(9)
���У�sgn(x)Ϊ����x�ķ��ź�����
��ʽ(8)��(9)��֪��EMCBϵͳ�����ƶ������ǹ��ڵ���ƶ�ת��TL������������������ƶ����ؿ�����һ����Χ�����ɷ���[6]����ˣ���EMCB�����ƶ�ϵͳ�������ƶ�������������һ����Χ�������ɿɿصġ�
��һ���ƶ������У������ƶ��ܵĹ�����ʧ��Ҫ�������ͭ��PCu������PFe����������Pinv����س�����Pbat[4]���ƶ��ܻ����ʦ�e�ɱ���Ϊ
 (10)
(10)
ʽ�У�EVΪ����ƽ��������ʧ��J��EJΪ����ת��������ʧ��J��
3 �ƶ���������Ʋ��Է���
�ƶ���������Ե����Ŀ��������������ƶ��ܻ����ʺ��ƶ��ȶ��ԣ����Ż���ʻԱ���ƶ��о�[19]�����IJ��������ƶ���������ԣ��ڱ�֤�ƶ�Ч�ܵ�ǰ���¾����ܵ�ʹǰ�������ƶ����ӽ�����I���ߣ����߱����õ��ƶ������ԡ�
�����ƶ�����I���߷�����Ա�֤�����⸽��·����ǰ����ͬʱ���������·�����ø���ϵ����ǰ�������ƶ������������¹�ϵʽ��
 (11)
(11)
ʽ�У�Fuf��Fur�ֱ�Ϊǰ�������ƶ�����N��mΪ����������kg��lfΪǰ�ᵽ���ĵľ��룬m��lrΪ���ᵽ���ĵľ��룬m��LΪ��࣬m��hgΪ�������ĸߣ�m��zΪĿ���ƶ�ǿ�ȣ���0Ϊ·�渽��ϵ����
����ʽ(9)��ʽ(11)�ɵ������ƶ��������µ�ǰ�����ֵ���ƶ����ط�������Ϊ
 (12)
(12)
ʽ�У�TLf��TLr�ֱ�Ϊǰ�����ֵĵ���ƶ����أ�N��m��Ref��Rer�ֱ�Ϊǰ�����ֵ���Ч�뾶��m��kLf��kLr�ֱ�Ϊǰ�����ֵ���������ϵ����
�ƶ��о��Ǽ�ʻԱ�복����������Ҫ��Ϣ��ֱ��Ӱ�쳵��Ʒ�ʵ����ۣ��ƶ������ʶ����ƶ����ٶȺͼ��ٶȱ仯�ʵ����������[20]�������ƶ�Ч�ܺ��ƶ��о��ĸ��Ի������������е��ƶ�ǿ�����ƶ������Ժá����ƶ�ǿ�����ƶ�Ч�ܸߣ�����ѡ�ö������߱���Ŀ���ƶ�ǿ����̤��λ�õĹ�ϵ����
 (13)
(13)
ʽ�У�xpΪ�ƶ�̤��λ�ã�%��ap��bp�ֱ�Ϊ̤�庯�����ϵ����
Ŀ���ƶ�ǿ�� ��Ӧ̤��λ��xp1����[0��xp1]���䣬
��Ӧ̤��λ��xp1����[0��xp1]���䣬 ��Ϊ�˱�֤�ƶ��ȶ��Ժ��ƶ������ԣ��ƶ���������Բ�ȡI���ߣ���[xp1��100]���䣬
��Ϊ�˱�֤�ƶ��ȶ��Ժ��ƶ������ԣ��ƶ���������Բ�ȡI���ߣ���[xp1��100]���䣬 ��Ϊ�˱�֤�ƶ�Ч�ܣ��ƶ���������Բ�ȡ�����ߡ�
��Ϊ�˱�֤�ƶ�Ч�ܣ��ƶ���������Բ�ȡ�����ߡ�
����ʽ(12)��ʽ(13)�ɵ�I�����ƶ��������µ�Ŀ�����ƶ�����Ϊ
 (14)
(14)
�� ��
�� ��
�� ��
�� ����I���߲����ƶ���������Ե�Ŀ�����ƶ����ر���ʽΪ
����I���߲����ƶ���������Ե�Ŀ�����ƶ����ر���ʽΪ
 (15)
(15)
���� ��
�� ��
�� ��
��
�����߲����ƶ���������Ե�Ŀ�����ƶ����ر���ʽΪ
 (16)
(16)
ʽ�У���f�ͦ�r�ֱ�Ϊ����ϵ���� ��
�� �ֱ�ΪI���ߺͦ����������㴦�ĵ���ƶ����ء�
�ֱ�ΪI���ߺͦ����������㴦�ĵ���ƶ����ء�
�����������1��ʾ������ƶ�������̤�忪�ȵĹ�ϵ������ͼ5��ʾ���ƶ��������ϵ��ͼ6��ʾ��I���ߺͦ����ߵĽ����Ӧ����ͬ������ϵ����Ҳ��EMCB�ƶ���������Եķֽ�㡣EMCB�ƶ�������������е��ƶ�ǿ���°�I���߷���ǰ�������ƶ��������ƶ�ǿ���°������߷���ǰ�������ƶ�����
��ʽ(15)��(16)��֪��Ŀ�����ƶ������ǹ���̤��λ�õĸ߽�������̤��λ���źŵ������ƶ����ǿ������ƣ������ƶ�ʱ�������ױ���ʧȥת����������ˣ����������ƶ���������Ի�����������������ʿ��ƣ����õ��͵�������ֵ���Ʒ��������ڸ��ֵĵ���ƶ�����ʹ������ʵ�ʻ�������Ŀ�껬���ʸ�����
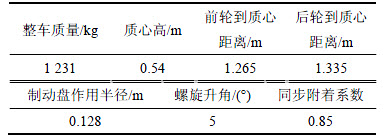
��1 ��������
Table 1 Vehicle parameters
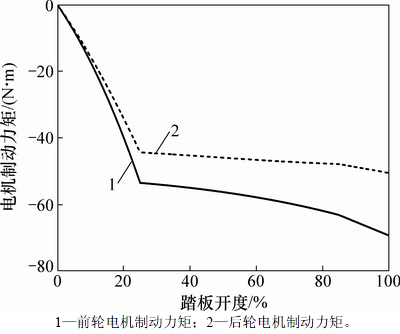
ͼ5 ����ƶ�������̤�忪�ȵĹ�ϵ����
Fig. 5 Motor braking torque and pedal travel
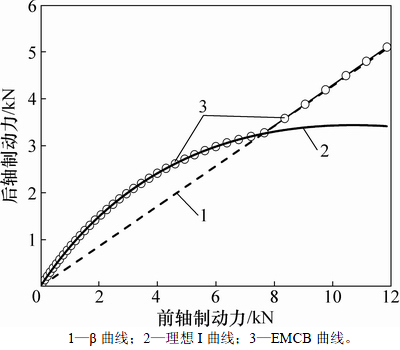
ͼ6 �ƶ��������ϵ����
Fig. 6 Braking force distribution characteristic curves
4 ������������
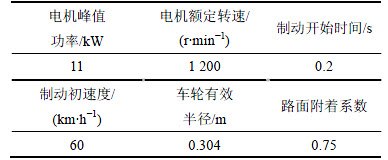
����ǰ��EMCBϵͳ����ϻ������ƶ���������ԣ���Ծ������ֵ�Ż�е��������ƶ�ϵͳ��С�͵綯��������������1����Matlab/Simulink�й��������ƶ�ϵͳģ�ͺ��ƶ���������Ʋ��ԣ�Ӧ��CarSim&Simulink���Ϸ���ƽ̨�����С������ʿ��ƵĽ����ƶ�����Ϊ������һ���ƶ����̵��ƶ��ܻ����ʡ��ƶ��ȶ��ԡ��ƶ��������Լ��ƶ�Ч�ܵȽ�����֤����������������2��ʾ��
��2 �������
Table 2 Experimental parameters
�����ʿ��ƵĽ����ƶ�������ͼ7��ʾ���е��ƶ�ǿ���£�ǰ�����ֽ��ٶȺͻ����ʱ仯һ�£���Ӧ��ʵ���ƶ�����������������I�������Ǻϣ���ͼ8��ʾ�����ƶ�ǿ�ȵ����ӣ�ǰ���ƶ����Ⱥ��������Ͽ죬ʵ���ƶ�����������ƫ������I���ߣ�����ئ�������������ǰ�����ֽ��ٶ�Ѹ���½���ǰ�ֱȺ�����ǰ0.1s�����������ƶ��ȶ��Ժ��ƶ�Ч�ܵ������е��ƶ�ǿ���£�ǰ�������ƶ����ܺܺ����������ƶ��������ϵ��ʹ��ǰ���ֵĻ��ơ�ĥ�����һ�£���Ч��С�˸���̥�������ԵIJ��죬�����·�����ø���ϵ���������ƶ��ȶ��Ժ������Ե�Ҫ��
�ƶ���ʼ��ǰ�����ֽ��ٶȺͻ����ʵı仯�Ƚ�ƽ����һ�£����ƶ�ǿ�ȵ����ӣ�ǰ�ֽ��ٶ��½��Ͽ죬����������Ѹ�٣�ǰ����ǰ���ֱ������ƶ�ʱ��Ϊ2.96s��ƽ���ƶ����ٶ�Ϊ0.57g�����ƶ����ﵽ·�渽�ż�����Ѹ�ٱ���ʹ�ó���ʧȥת�����������Ҵ�ʱ���ת��Ϊ0r/min����Ӧ�ĵ������Ч�ʷdz��͡�Ϊ�ˣ������������������ʿ��Ƶ��ƶ���������ԣ������ƶ�ʱ���Ƴ��ֻ����ʷ�ֹ���ֱ����������ʿ��Ƶ�������Ϊ5km/h����ͼ9��ʾ��ǰ�����ֻ�����ά����20%��������Ӧ��ǰ�������ƶ��������ڷ�ֵ�������ƶ�ʱ��Ϊ2.69s��ƽ���ƶ����ٶ�Ϊ0.62g���������ʿ�����ȣ����뻬���ʿ��ƺ��ƶ�ʱ������0.27s��ƽ���ƶ����ٶ����8.8%����������ƶ�Ч�ܺ��ƶ������ȶ��ԣ��ֱ����˳�����ת��������������С��5km/hʱ���رջ����ʿ��ƣ�ǰ�����ֻ�����Ѹ��������100%�����ֱ�����ǰ�������ƶ������ƶ�ǿ���ɷ�ֵ�½���
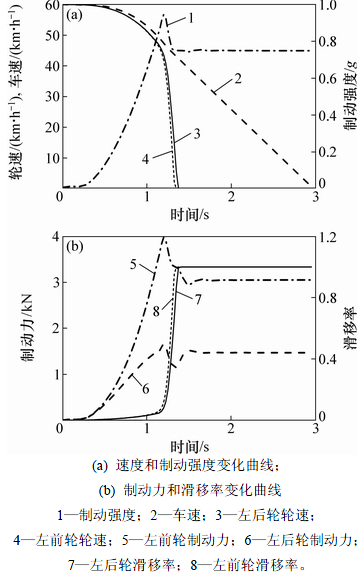
ͼ7 �����ʿ��ƵĽ����ƶ�����
Fig. 7 Emergency braking process without slip control
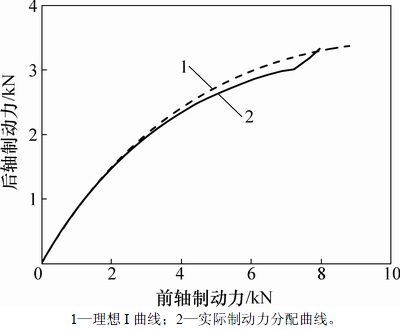
ͼ8 ʵ���ƶ��������ϵ
Fig. 8 Practical braking force distribution characteristics
�ƶ��ܻ��������ƶ�ǿ�Ⱥͳ��ٷ����ɢ��ֲ���ͼ10��ͼ11��ʾ����ͼ10��ͼ11�ɼ����泵���½����ƶ��ܻ������ȼ������Ӻ�ƽ���½������ƶ�ǿ�ȵIJ������ӣ��ƶ��ܻ����������Ӻ��С�����ƶ�ǿ�ȴﵽ·�渽�ż��������ʿ��Ƶ��ƶ��ܻ����ʼ����½���11.1%���л����ʿ��Ƶ��ƶ��ܻ����������½���22.8%���ƶ��ܻ����������105%�����е��ƶ�ǿ��0.1~0.6g���еȳ���40~60km/h�£�ƽ���ƶ��ܻ�����Ϊ50.6%����ˣ�����EMCB�����ƶ�ϵͳ���ƶ���������Դ������˳���һ�γ��е����ƶ��ܻ����ʣ���Ч�������˵綯��������ʻ��̡�
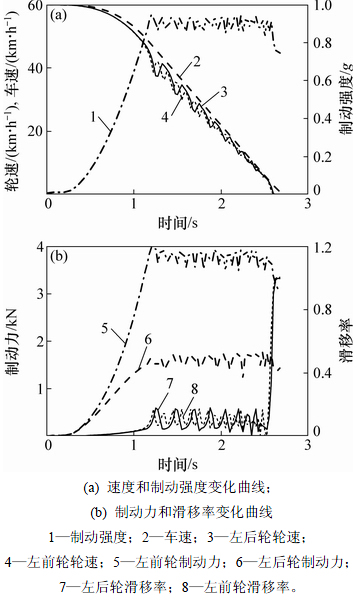
ͼ9 �л����ʿ��ƵĽ����ƶ�����
Fig. 9 Emergency braking process with slip control
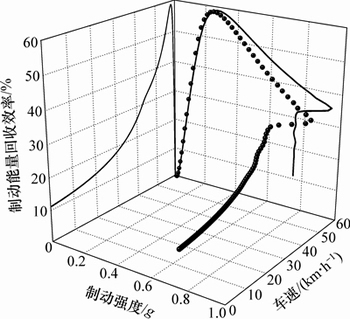
ͼ10 �����ʿ��Ƶ��ƶ��ܻ�����ɢ��ֲ�
Fig. 10 Scatter of braking energy recovery efficiency without slip control
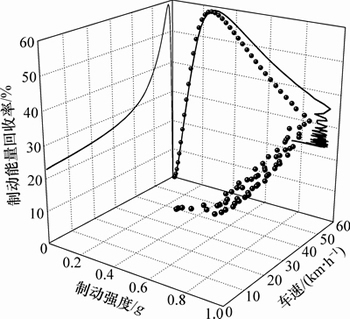
ͼ11 �л����ʿ��Ƶ��ƶ��ܻ�����ɢ��ֲ�
Fig. 11 Scatter of braking energy recovery efficiency with slip control
5 ����
1) EMCB�����ƶ�ϵͳ�ƶ�����������ܹ�ʵ��ǰ�������ƶ�������ӽ�I���ߣ���֤���ƶ������ȶ��ԣ������·�����ø���ϵ�����������ƶ�ƽ˳�ԡ�
2) EMCB�����ƶ�ϵͳ���е��ƶ�ǿ�Ⱥ��еȳ����¾��нϸߵ��ƶ��ܻ����ʣ�ƽ���ﵽ50.6%�������ƶ������´ﵽ11.1%�����������ʿ��ƿɴﵽ22.8%���������˳������ƶ��ܻ����ʣ���Ч�������˵綯��������ʻ��̡�
3) ����EMCB�����ƶ�ϵͳ�ƶ���������Եķ��������ʿ��ƣ�������ƶ�Ч�ܡ��ƶ��ܻ����ʺ��ƶ��ȶ��ԣ�Ϊ��һ��������õ�ABS��EBD��ESP�ȿ������ܵ춨�˻�����
�ο����ף�
[1] CLARKE P, MUNEER T, CULLINANE K. Cutting vehicle emissions with regenerative braking[J]. Transportation Research Part D: Transport and Environment, 2010, 15(3): 160-167.
[2] ���, л�ϱ�, �ν���, ��. ��϶����ͳ�����ʽ�����ƶ������Ż�������[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2013, 44(1): 122-128.
ZHU Hao, XIE Yubing, HE Jianhui, et al. Hybrid electric bus regenerative braking parallel control strategy optimization and simulation[J]. Journal of Central South University (Science and Technology), 2013, 44(1): 122-128.
[3] ZHANG R, YAO E J. Eco-driving at signalised intersections for electric vehicles[J]. IET Intelligent Transport Systems, 2015, 9(5): 488-497.
[4]  A, PALACIN R, BATTY P, et al. A systems approach to reduce urban rail energy consumption[J]. Energy Conversion and Management, 2014, 80: 509-524.
A, PALACIN R, BATTY P, et al. A systems approach to reduce urban rail energy consumption[J]. Energy Conversion and Management, 2014, 80: 509-524.
[5] �ſ���, ����, ����̴, ��. ���������ó��ƶ��ܻ��ռ�����չ��״��չ��[J]. ��������, 2014, 36(8): 911-918.
ZHANG Junzhi, L Chen, LI Yutong, et al. Status quo and prospect of regenerative braking technology in electric cars[J]. Automotive Engineering, 2014, 36(8): 911-918.
Chen, LI Yutong, et al. Status quo and prospect of regenerative braking technology in electric cars[J]. Automotive Engineering, 2014, 36(8): 911-918.
[6] �����, �����, �¼���. ����I���ƶ���������������綯�����ƶ��ܻ��ղ��Ե��о�[J]. ��������, 2013, 35(12): 1057-1061.
SUN Daxu, LAN Fengchong, CHEN Jiqing, et al. A study on the braking energy recovery strategy for a 4WD battery electric vehicle based on ideal braking force distribution(Curve I)[J]. Automotive Engineering, 2013, 35(12): 1057-1061.
[7] ¬����, ŷ������, �Ⱦ�, ��. �綯��������ͬ����������ƶ��ܻ�������[J]. �й��������ѧ��, 2013, 33(3): 83-91.
LU Dongbin, OUYANG Minggao, GU Jing, et al. Optimal regenerative braking control for permanent magnet synchronous motors in electric vehicles[J]. Proceedings of the Chinese Society for Electrical Engineering, 2013, 33(3): 83-91.
[8] LI Z, CHOWDHURY M, BHAVSAR P, et al. Optimizing the performance of vehicle-to-grid (V2G) enabled battery electric vehicles through a smart charge scheduling model[J]. International Journal of Automotive Technology, 2015, 16(5): 827-837.
[9]  B A. A control strategy for parallel hybrid electric vehicles based on extremum seeking[J]. Vehicle System Dynamics, 2012, 50(2): 199-227.
B A. A control strategy for parallel hybrid electric vehicles based on extremum seeking[J]. Vehicle System Dynamics, 2012, 50(2): 199-227.
[10] ZOU Zhongyue, CAO Junyi, CAO Binggang, et al. Evaluation strategy of regenerative braking energy for supercapacitor vehicle[J]. ISA Transactions, 2015, 55: 234-240.
[11] ��־ǿ, ��ѧѸ. ���綯������Һ���������ƶ�����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2011, 42(9): 2687-2691.
LIU Zhiqiang, GUO Xuexun. Electronic hydraulic compound regenerative braking control for electric vehicles[J]. Journal of Central South University (Science and Technology), 2011, 42(9): 2687-2691.
[12] ZHOU Z G, MI C, ZHANG G X. Integrated control of electromechanical braking and regenerative braking in plug-in hybrid electric vehicles[J]. International Journal of Vehicle Design, 2012, 58(2/3/4): 223-239.
[13] JO, C, HWANG S, KIM H. Clamping-force control for electromechanical brake[J]. IEEE Transactions on Vehicular Technology, 2010, 59(7): 3205-3212.
[14] KO J, KO S, SON H, et al. Development of brake system and regenerative braking cooperative control algorithm for automatic-transmission-based hybrid electric vehicles[J]. IEEE Transactions on Vehicular Technology, 2015, 64(2): 431-440.
[15] LONG B, LIM S T, BAI Z F, et al. Energy management and control of electric vehicles, using hybrid power source in regenerative braking operation[J]. Energies, 2014, 7(7): 4300-4315.
[16] ����, ������, ����. ���ӻ�е�ƶ�ϵͳ���ƶ��ܻ��յķ���[J]. ��������, 2010, 32(11): 972-976.
WANG Zhen, MA Chaoyong, WANG Fei. An analysis on the braking energy regeneration in electromechanical braking system[J]. Automotive Engineering, 2010, 32(11): 972-976.
[17] WANG Guoye, XIAO Hang, ZHANG Juanli, et al. Energy regenerative braking ABS control research on feedback lockup driving-braking integrated system for electric vehicles[J]. Mechanics, 2012, 18(3): 341-346.
[18] �Ⱦ�. ���������͵綯����������[D]. ����: �廪��ѧ��е����ѧԺ, 2012: 55-64.
GU Jing. Vehicle control of four-wheel driven micro electric vehicle[J]. Beijing: Tsinghua University. School of Mechanical Engineering, 2012: 55-64.
[19] CIKANEK S, BAILEY K. Regenerative braking system for a hybrid electric vehicle: U.S, 20030184152[P]. 2002-03-25.
[20] MUTOH N, HAYANO Y, YAHAGI H, et al. Electric braking control methods for electric vehicles with independently driven front and rear wheels[J]. IEEE Transactions on Industrial Electronics, 2007, 54(2): 1168-1176.
(�༭ �Կ�)
�ո����ڣ�2016-08-30�������ڣ�2016-10-10
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51175498)(Project (51175498) supported by the National Natural Science Foundation of China)
ͨ�����ߣ��Խ����������ڣ����³���������ѧ�����о���E-mail��zhjzh@cau.edu.cn
ժҪ��������е綯���������ƶ��IJ��㣬���һ�����͵�Ż�е��������ƶ�ϵͳ(electromagnetic-mechanical coupled regenerative braking system��EMCB)����������ж���ѧ��������ϻ����о�������EMCBϵͳ�������ƶ��������������һ���ƶ���������ԣ�����EMCBϵͳģ�ͺͿ��Ʋ��Է���ϵͳ��Ӧ��CarSim&Simulink���Ϸ���ƽ̨�����С������ʿ��ƵĽ����ƶ�����Ϊ�������ƶ��ܻ��ա��ƶ��ȶ��Ժ��ƶ������ԵȽ��жԱ��о�����֤�������о������������������ƶ���������Բ���ʵ���е��ƶ�ǿ����ʵ���ƶ�����������������I���߸߶��Ǻϣ���������ƶ�ǿ�����ƶ�Ч�ܵ�������֤���ƶ��ȶ��Ժ��ƶ������ԣ����������������Ч�ʣ���Ч�����˵綯��������ʻ��̣�Ϊ��һ��������õķ������ƶ�ϵͳ(ABS)�������ƶ�������ϵͳ(EBD)�������ȶ�ϵͳ(ESP)�ȿ������ܵ춨�˻�����
[5] �ſ���, ����, ����̴, ��. ���������ó��ƶ��ܻ��ռ�����չ��״��չ��[J]. ��������, 2014, 36(8): 911-918.
[7] ¬����, ŷ������, �Ⱦ�, ��. �綯��������ͬ����������ƶ��ܻ�������[J]. �й��������ѧ��, 2013, 33(3): 83-91.
[11] ��־ǿ, ��ѧѸ. ���綯������Һ���������ƶ�����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2011, 42(9): 2687-2691.
[16] ����, ������, ����. ���ӻ�е�ƶ�ϵͳ���ƶ��ܻ��յķ���[J]. ��������, 2010, 32(11): 972-976.
[18] �Ⱦ�. ���������͵綯����������[D]. ����: �廪��ѧ��е����ѧԺ, 2012: 55-64.
