
����Ŀ��ʶ��Ķನ��ϵͳ̽��������
������1,2�����ĺ�3�������4������3����˧��3�����ʽ�3
(1. �������´�ѧ ��ͨ����װ���뺣��ѧԺ������ ������116026��
2. �й���ѧԺ �����Զ����о��� ������ѧ�����ص�ʵ���ң����� ������110016��
3. �������´�ѧ ��Ϣ��ѧ����ѧԺ������ ������116026��
4.�ൺ�����о��豸��������˾��ɽ�� �ൺ��266000)
ժ Ҫ��
����ϵͳ���д�Χ���١�ȷ����Ч����Ѱ����Ŀ�꣬��GeoSwath�ನ��ϵͳ��̽��ԭ�����ռ�ֱ����Լ�Ŀ��ʶ��ֱ��ʵ�Ӱ�����ؽ����о����Ƶ����ڴ�ʶ��Ŀ��ߴ��GeoSwath�������峤�ȡ����١���Ѱ���ǿ��ȵ�̽�������Ʒ�����ͨ������Ͷ���˹�Ŀ��Ķನ��̽�����飬��֤��GeoSwathʶ��Ŀ��ǰ�ڵ�̽�������Ƶ���Ҫ�Ժͺ����ԡ�
�ؼ��ʣ�
GeoSwath�ನ������ϵͳ���ռ�ֱ���������Ŀ��̽������Χ������Ѱ��̽�������
��ͼ����ţ�P229 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0677-07
Detection parameters design for multi-beam sounding system based on target recognition
WU Li-hong1, 2, XU Wen-hai3, ZANG Li-long4, AN Yang3, YANG Shuai-feng3, CAI Ren-jie3
(1. College of Transportation Equipment and Ocean Engineering, Dalian Maritime University, Dalian 116026, China;
2. State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110016, China;
3. College of Information Science and Technology, Dalian Maritime University, Dalian 116026, China;
4. Qingdao Marine Research Equipment Service Co., Ltd, Qingdao 266000, China)
Abstract: To detect sea floor objects fast, accurately and effectively in large-scale underwater region, a design way for detection factors related to ping-length, ship velocity and coverage-width was derived by analyzing GeoSwath��s theory, spatial resolution and target resolution factors. The experiments to detect artificial objects in sea floor were carried out. The results show the importance and rationality to set detection factors of GeoSwath.
Key words: GeoSwath multi-beam eco-sounding; spatial resolution; sea floor object detection; large scale and fast detection; detection factors
���öನ������ϵͳ��ú�������������Ŀ�����ά��̬��������ͼ��ʾ[1]��Ҫ��ನ��̽��ʱ�ܻ��Ŀ�����ά�߶ȷ����ϵ��㹻̽��㣬������ʵ��ȫ����̽�⣬�����ߵ�ȫ���ǺͲ�����ӡ��ȫ�����Լ���Ҫ�ܸߵĶ�λ���ȡ�ǰ�߹�ϵ��̽������Ŀɿ��ԡ���ȫ�Ժ������ԣ�����ȫ���ǿ���ͨ���ನ������Χ�豸�������ǿ������ò�ͨ��ʵʱ���߸���ͼ����ʾ��ʶ�𣬶�������ӡ��ȫ��������Я���ನ����̽���Ѱ�������ٶȡ��ನ������ǡ�ˮƽ���������ǡ�ˮ��Ͷನ��ϵͳ����Ƶ�ʵ��������Ͼ���������ͨ�������ನ����ӡ����ά�ռ�ֱ����Լ�����Сʶ��Ŀ��ijߴ磬�������Ƶ���ʶ��Ŀ��������̽�ٶȣ����ǿ��ȵ�̽���������λ���ȿ��Բ�����ƥ��Ķನ����Χ������DGPS����������RTK��λ��ʽ��ͨ��������Ҫ̽���Ŀ��ߴ�ֱ��ѡ��λ�����������ನ��Ŀ��ʶ�����ǹ�ϵ��̽�����Ч�ԡ������Ժ;�ȷ�ԣ��б�Ҫ�ڶನ������֮ǰ����ȷ����
��С����[2]���ڹ��ʺ���������ȫ���ǹ淶���Ƶ��˻���Seabat8101�ನ��ϵͳ�Ŀռ�ֱ���ģ�ͣ������õ�ʵ��ȫ���Dz�����ͬˮ���Ӧ������ٺ�̽�⸲�ǿ��ȡ������յ�[3]�����˶ನ�������ǽ�ӡΪ���Σ����о�������̬�仯�Ľ�ӡ��������仯���������ʵ�ʶನ������������������ȷ�Ժ�Ŀ��ʶ���кܴ�İ���������������Ҫ��������GeoSwath�ನ���ռ�ֱ���ģ�ͣ���ʶ��Ŀ��ķֱ��ʽǶȣ��Ƶ���ƶನ�������������㷨�����̣�ʵ�����ڸ���Ŀ�������öನ������ȷ����̽�⣬��������������֤��
1 GeoSwath�ನ������ϵͳ���� ģ��
GeoSwath�ನ���������ǻ�����λ����������ϵͳ�����ϳ��沨���γɵĶನ��ϵͳ��������ʵ�ֺ���Ŀ����꾡��̬����̽�⣬�����ܳ�����ú���Ŀ��ĵ��ʽṹ�����в���Ͳ�ɨ����[4]��GeoSwathϵͳ��240������Ĵ�ֱ���Ƿ�Χ�ڽ���ʱ�������ǶȲ�������ֱ������Ϊ0.9�㣬ˮƽ������Ϊ0.5�㣬���������ǿɴ�120�㡣�˶ನ��ϵͳ�ɱ�Я�����ڴ��ϲ࣬Ҳ�ɹ̶���װ�ڴ��ף��Ժ���������ɨ�衣ϵͳ�ɼװ������Ԫ��ˮ�»�������Ԫ����Χ�豸(���GPS�����������ټơ���λ�ǡ��ز������ǻ�߶ȼơ���̬������)���ɡ�
2 �ನ������ϵͳ�ռ�ֱ���ģ��[2]
2.1 ��ֱ���亣�IJ����ֱ���
�ನ�����벨���Ǵ�ֱ����ģ������������ڵ�����ϵͳ��������Ϊ�������������ǵ���������Ϊ����ɢ����Բ�̡������嵽��ij�ʼʱ��t0��Բ�����Ե�����嵽���ʱ��Ϊt����ʾ��ͼ��ͼ1��ʾ���ನ�����벨��������ˮƽ�ֱ����Ƶ���ʽ(1)~(4)��r��Ϊ����Ĵ�ֱ�������ӡ�ֱ��ʣ�CΪ���٣�HΪ��װ�ನ�����·���ˮ������ò����ǻ�á�
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
![]() (4)
(4)
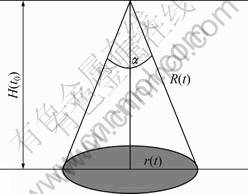
ͼ1 �ನ�����벨��(������)����ʾ��ͼ
Fig.1 Schematic diagram of middle beam launching for multi-beam sonar
2.2 ��б���䲨���ķֱ���
�ನ���������벨���⣬��������������б����ģ�Ҳ��̽��Ч�ʽϸߵIJ�������3������ķֱ���ʾ��ͼ��ͼ2��ʾ�������洬����ϵ��̽�����Ϊx�ᣬ����Ϊy�ᣬ��ֱ����Ϊz�ᡣ��б���������ķ����Ϊ�ȣ�ˮƽ���䲨����Ϊ�����������䲨����Ϊ�¡�����ˮƽ�����ϣ���������嵽���ʱ��t0����Զ��Ե�����嵽���ʱ��Ϊt������ˮƽ�����Ǻ��������Ƕ���С��3������IJ�����ӡΪ[5]��
![]() (5)
(5)
![]() (6)
(6)
![]() (7)
(7)
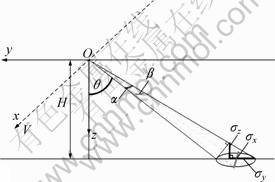
ͼ2 �ನ���ռ�ֱ���
Fig.2 Spatial resolution of multi-beam sonar
���ڶನ��������б���䲨�ж���������������ֱ���ȡ�����Ƕ�Ӧ�IJ�����ӡ���ȣ�����ȡȫ��ӡ����ನ���ռ�ķֱ���Ϊ��
![]() (8)
(8)
![]() (9)
(9)
![]() (10)
(10)
2.3 �ನ����ʶ���Ŀ��ߴ�
�ನ������ֱ��ʻ��漰�����١����ݹ��ʺ��������淶�������Ҫ̽�Ŀ���Ŀ���������ߴ���������ͼ3�е�L1��L1�뺽��v(m/s), �������峤��Lp(ping length, m)��ˮ��H(m)�µ�����ÿ�뷢���pr(Ping rate)[4]�Ĺ�ϵ��ʽ(11)~(13)�Ƶ��õ���
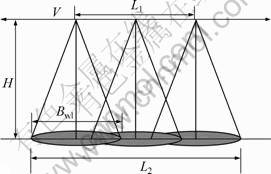
ͼ3 �ನ����������ȫ����ʾ��ͼ
Fig.3 Schematic diagram of longitudinal coverage for multi-beam sonar
![]() (11)
(11)
![]() (12)
(12)
![]() (13)
(13)
���У�PrΪ˫�����ɵ�ÿ��ÿ�뷢��������Ŀ��NΪ��ʶ��Ŀ��ʱ��Ҫ������̽�������ͨ��N��3��CΪ���٣�Ĭ��Ϊ1 500 m/s���������峤��Lp�ܶನ��ϵͳ����Ӱ�죬��ˮ����һ���Ĺ�ϵ��Ϊ��ʵ��Ŀ��̽����ȫ���ǣ���ͼ3��ʾ��Ŀ��ijߴ�������L2��
![]() (14)
(14)
��ˣ��ನ������ϵͳ��3�������ʶ��Ŀ��ijߴ�Ϊ��
 (15)
(15)
�ɴ˿ɼ����ನ������ֱ����뺽�١��������峤�ȡ����١�ˮ����������йء�����ֱ�������ȡ���������ǡ�ˮƽ�������йء����濪��Խ��̽�����Խ��̽��ֱ���Խ�͡�����ֱ�����ˮƽ�������Լ�����ʱ���йء�
3 ����Ŀ��ʶ��ನ��̽����� ���
3.1 �������
���ڶನ�������ǣ�������ping ��ʱ����tR���뱣֤�ܹ��յ����Ե�����Ļز������������濪��С��90�㣬���絥̽ͷSeabat 8101��ȫ���濪��Ϊ150�㣬�������濪��Ϊ75��ʱ������Զ���벨���Ļز�ʱ��Ϊ��
![]() (16)
(16)
���������濪�Ǵ���90��ģ�����GeoSwathȫ���濪��Ϊ240�㣬�����������Ϊ120��ʱ����������ʱ�����趨�ķ������峤�Ⱦ���������GeoSwathϵͳ����˫�������������ͽ��գ���ˣ���2�����巢��ʱ����tRΪ��Զ���벨���Ļز�ʱ���2������ʽ(17)��ʾ[4]��
![]() (17)
(17)
���������ٽ�ӡ����Ϊ��
![]() (18)
(18)
�����ܵ��β���ʱҪ��ping֮��ȫ���ǣ��ನ�����������ٱ��뱣֤ping ��ping ֮������ӣ��������Ϊ��
![]() (19)
(19)
���ڵ����Dz�����90��ĵ�̽ͷ�ನ����
![]() (20)
(20)
���ڵ����dz���90���˫̽ͷ�ನ����
![]() (21)
(21)
��GeoSwath�ನ��ϵͳΪ�����䲨�����濪��Ϊ240�㣬����max=120�㣬��������Ϊ0.9�㣬���ù�ʽ(21)���㡣����GeoSwath̽�������������ϵ0��B��12H�������ڷ������峤�Ⱥ�̽����Ⱥ��������ʽ(22)������ʽ(21)�����Եõ�GeoSwath�ĺ����븲�ǿ��ȵĹ�ϵ��ͼ4��ʾ��
![]() (22)
(22)
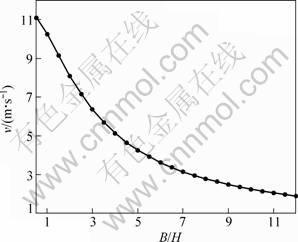
ͼ4 ��ͬ���ǿ����������������
Fig.4 Coverage width vs ship velocity
����ٹ�ϵʽ(20)��(21)û�п�������ֱ��ʵ�Ҫ��ֻ�ǵ������ܽ��յ���Զ����Ƕ�������ġ����ٵ����վ���Ӧ��ͬʱ��������Ŀ��ֱ��ʦ�x���ء�
3.2 ����ǻ������峤�����
���ڶನ������ֱ��ʺ�ˮ������������йأ�����ʽ(15)������֪ˮ��(�ɶನ����Χ�豸�����Dz��)��Ŀ��ij߶�(����ֱ���Ҫ��)���Ϳ���ȷ�������������ǣ�������������ͼ5��ʾ�Ĺ�ϵ����ͼ5���Կ�������������ֱ��ʣ�����ˮ������ӣ������Ǽ�С��̽����������ˮ�ı�����С������̽��Ч�ʽ��͡�
�������峤��Lp��ֱ��ʡ�ˮƽ�����Ǽ���ȵĹ�ϵ����ʽ(23)~(24)��
![]() (23)
(23)
![]() (24)
(24)
����GeoSwathϵͳ����=0.5�㣬Ҫʶ�����߶�Ϊ��y=1 m��Ŀ�����ͬˮ��ping length���ֵ��ͼ6��ʾ��
3.3 �ನ��̽������������
��֪�ನ��ˮƽ������Ϊ���㣬��������Ϊ�¡㡣���ݲ����Dz�õ�ˮ���Լ�Ŀ��ijߴ磬����pinglength������v��ʶ��Ŀ�꣬�����̿ɷ�Ϊ����5�����裺
(1) ����ˮ��H������Ŀ��ķֱ�������ʽ(15)�еĺ���ֱ���ȷ�������Ǧȡ�
(2) ���������ǣ�ȷ�����������ȣ���ˮ��ı�����ʾ��n=2tan �ȡ�
(3) ���������ǣ����ù�ϵʽ��Lp=H/cos �ȣ� ���㷢�����峤�ȡ�
(4) �����������ʣ�����˫̽ͷ���������������������壬![]() �����ڵ�̽ͷ��
�����ڵ�̽ͷ��![]() ��
��
(5) �����Ƽ����٣���������ʶ��Ŀ��ĵ���N=3�������ܽ��յ���Զ����ʱ�������vmax(��̽ͷ����ʽ(20)��˫̽ͷ����ʽ(21)���˹�ʽ������dzˮ���Լ�����Ŀ��ʶ��ֱ���ʽ(15)�еĦ�x(�˹�ʽ��������ˮ)��ȡ����֮���С�ߡ�
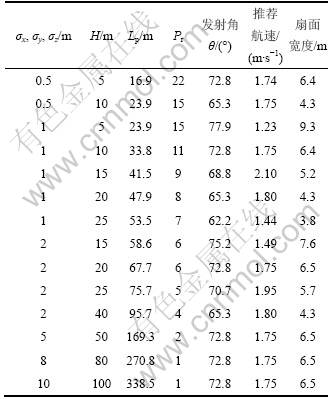
�������϶ನ������������̣����Ƴ����Ի�öನ��ϵͳ����Ŀ��߶��������������̽�������ķ������峤�ȡ����١�������ȡ���1�г�GeoSwath�ನ������ˮ����̽�������ơ�
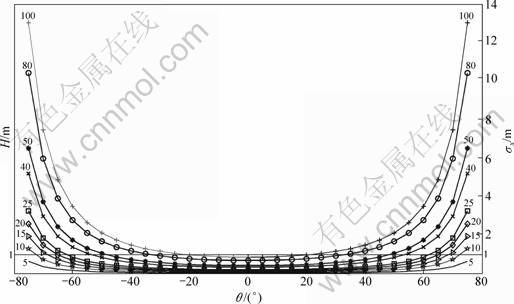
ͼ5 ����ֱ�����ˮ�����ǵĹ�ϵ
Fig.5 Horizontal resolution vs depth and transmitting angle
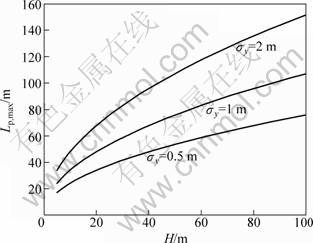
ͼ6 ��ͬ���ʶ��Ŀ���뷢�����峤�ȹ�ϵ
Fig.6 Ping length vs depth and horizontal resolution
��1 GeoSwath Ŀ��ʶ����̽�������ƹ�ϵ
Table 1 Relation between target resolution and detection parameters for GeoSwath
4 ����Ŀ��̽������
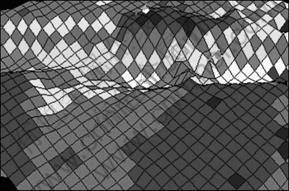
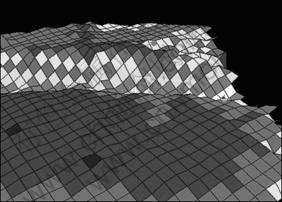
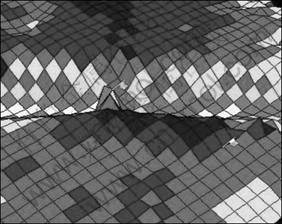
�����˹�Ŀ��Ϊd 0.6 m��0.9 m����Ͱ�������н�3��Ͱ�����ɡ�ź�Ρ���ƽ���ں����У���ͼ7��ʾ����������3����ͬ�ĺ��ߣ��ֱ�����Ϊ����1~3����ͼ8~10��ʾ��ʹ��Ŀ�����ڶನ����б�����IJ�ͬ̽�����λ�ã��߲�ͬ������ͬһĿ��ʶ���ò�ͬ��̽��������ͼ11~13��ͼ11~13��Ŀ���Ͷ��λ�ôӰ�Ŀ���ˮ�渡Ư��GPS����������E:372809��N:4302895,��ͼƽ̹�ص�С���ı�ʶ�㣬���У�ͻ���С����Ϊʵ��̽��õ���Ŀ��λ�ã���λ��Ϊ��E372800 N:4302893�����Կ�����̽��Ŀ�����ʵλ�ú�Ư��Ӧ��λ����ƫ�������Ȼ���㸡Ưϵ�����ڵİ뾶��Χ����λ�ÿ������Ρ��ԱȺ����Ͷ�Ӧ��̽����ͼ���Կ���������1��3����Ŀ��Ͷ�ŵ㣬��Ŀ����������������ͼ11��13��ʾ��Ŀ��ֱ�����ߣ�������2����Ŀ���Զ������ǻ������峤�Ƚϴ�ʹ�ú���ֱ��ʺ���ȷֱ��ʽ��ͣ�����ͼ12Ŀ���������������̽��������άͼ�п��Կ�����Ŀ��ǡ��Ͷ���ں����ϣ������ĵ���Ϊ��ʯ������Ͱ�ķ�����ǿ�ܴ��¶ನ�����Ѵ���Ӱ��ͼ��ʶ��Ŀ�꣬��ֻ�ܴ���Ȳ���ʶ��Ŀ�ꡣ����GeoSwathϵͳ�ܽ�����Ⱥ���Ӱ��ʶ��Ļ��� �ص�[6]��

ͼ7 ��ź�Ρ�3Ͱ�˹�Ŀ��
Fig.7 Three artificial barrels in series
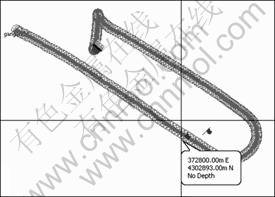
ͼ8 ����1
Fig.8 Line 1
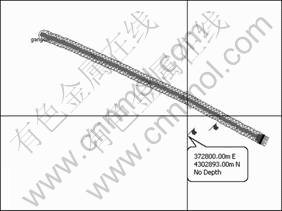
ͼ9 ����2
Fig.9 Line 2
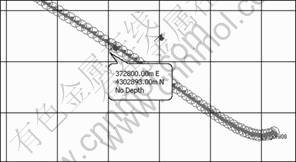
ͼ10 ����3
Fig.10 Line 3
ͼ11 ����1�������άͼ
Fig.11 Depth gridfly of line 1
ͼ12 ����2�������άͼ
Fig.12 Depth gridfly of line 2
ͼ13 ����3�������άͼ
Fig.13 Depth gridfly of line 3
5 ����
(1) �о��ನ������ϵͳ�Ŀռ�ֱ��ʣ��Ƶ�Ŀ��ʶ����ನ������ǡ��������峤�Ⱥ�ˮ�ˮ��Я���ನ���Ĵ��ٵ�ȷ����ϵ��������GeoSwath������Ӧ�ĺ���Ŀ��̽�����飬��֤����Ŀ��ʶ��Ķನ��̽�������Ƶĺ����Ժͱ�Ҫ�ԡ�
(2) �ನ������ֱ����뺽�١��������峤�ȡ����١�ˮ����������йء�����ֱ�������ȡ���������Ǽ�ˮƽ�������йء����濪��Խ��̽�����Խ��̽��ֱ���Խ�͡�����ֱ�����ˮƽ�������йأ��Լ�����ʱ���йء�
(3) ͬһĿ�꣬�ڲ�ͬ��������������ʾ�IJ����ǶȲ�ͬ��Ŀ��������̶Ȳ�ͬ��������ѵ���Ѱ·�����õ�Ŀ��ֱ��ʡ��ɸ��ݶನ��̽�����ȷ�����������㡣
(4) ����Ŀ�����ں����ʺ�Ŀ��Ͻӽ��������籾ʵ������Ͱ�ṹ��Ŀ�����ں��������ڣ�ʹ�ñ�����������ǿ�Ⱥ�Ŀ��������������ͼ�����ʶ��Ŀ�꣬��ֻ�ܴ����ͼ��ʶ��Ŀ�꣬����Ŀ��������Կ��Էֱ��Ŀ�ꡣ
�ο����ף�
[1] ���㴺, Ф����, ������, ��. ��������ѧ����[M]. ����: ��������, 2006: 124-129.
LIU Yan-chun, XIAO Fu-min, BAO Jing-yang, et al. Introduction to hydrography[M]. Beijing: Surveying and Mapping Press, 2006: 124-129.
[2] ��С��, ���㴺, Ф����, ��. �ನ������ȫ���Dz����ֱ����о�[J]. ����ѧ, 2010, 35(s): 22-24.
ZHU Xiao-chen, LIU Yan-chun, XIAO Fu-min, et al. Full coverage resolution of multibeam echo sounding[J]. Science of Surveying and Mapping, 2010, 35(s): 22-24.
[3] ������, �Ծ���, ���㴺, ��. �ನ���������������ģ���о�[J]. ������, 2010, 30(2): 15-18.
ZOU Yong-gang, ZHAI Jing-sheng, LIU Yan-chun, et al. A bottom coverage estimation model based on trapezium for multibeam system[J]. Hydrographic Surveying and Charting, 2010, 30(2): 15-18.
[4] GeoSwath plus operational manual 9-GS+ -6100/BE [EB/OL]. http://www.geoacoustics.com, GeoAcoustics Ltd, 2006: 87-88.
[5] ��־��. GeoSwath ����������ԭ��̽������Ӧ��[J]. ˮ�˹���, 2002, 345(10): 31-33.
WANG Zhi-dong. Probe into the principle of GeoSwath bathymeter and its application[J]. Port and Waterway Engineering, 2002, 345(10): 31-33.
[6] ������, ŷ������, ����Ӣ, ��. ��ɨ���ɺͶನ������ϵͳ���̽�⺣��Ŀ��[J]. ������, 2009, 29(5): 51-53.
DONG Qing-liang, OUYANG Yong-zhong, CHEN Yue-ying, et al. Measuring bottom of sea target with side scan sonar and multibeam sounding system[J]. Hydrographic Surveying and Charting, 2009, 29(5): 51-53.
(�༭ ����Ƽ)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ�����ҿƼ�֧�żƻ���Ŀ(2009BAG18B03)��������Ȼ��ѧ����������Ŀ(51009016)��������ѧ�����ص�ʵ���ҿ��ſ���������Ŀ(RLO201015)�������У��������ҵ���ר���ʽ�������Ŀ(2011JC015)
ͨ�����ߣ�������(1978-)��Ů�����������ˣ���ʿ����ʦ�����º����桢ˮ�»����˼�������ѧ�о����绰��15804254598��E-mail��wlh@sia.cn
ժҪ��Ϊ��ʵ�����öನ��ϵͳ���д�Χ���١�ȷ����Ч����Ѱ����Ŀ�꣬��GeoSwath�ನ��ϵͳ��̽��ԭ�����ռ�ֱ����Լ�Ŀ��ʶ��ֱ��ʵ�Ӱ�����ؽ����о����Ƶ����ڴ�ʶ��Ŀ��ߴ��GeoSwath�������峤�ȡ����١���Ѱ���ǿ��ȵ�̽�������Ʒ�����ͨ������Ͷ���˹�Ŀ��Ķನ��̽�����飬��֤��GeoSwathʶ��Ŀ��ǰ�ڵ�̽�������Ƶ���Ҫ�Ժͺ����ԡ�
