
������ʽ������������Խ������
��ҫ�������£���������������������
(�����Ƽ���ѧ ��е����ѧԺ��������100083)
ժ Ҫ��
�Ǻ���Һ���������Ӷ��ĵ��ʻ����������Ʊ�һ�ָ�����ʽ�������������ú���������������4�鸴��������½�ʽ����������ɣ���������ֱԽ�Ϲ����¸�������ṹ�ľ���ѧģ�ͣ��õ�Ӱ����Խ�����ܵ���Ҫ�ṹ����������MATLAB�Ը�������ṹ���������Ż���ƣ���ߺ�����������Խ�����ܣ��������Ӷ��ĵ��ʻ�������������adams�Ը�����ʽ�������������ж���ѧ��ģ�ͷ����������ú�����������ֱԽ�ϵĶ���ѧ�������ߡ��о�������������������ڸ��Ӷ�������ʻ����¾��н�ǿ��Խ�������ͽϸߵ�ͨ���ȶ��ԡ�
�ؼ��ʣ�
������ʽ����������������������Խ�����������������
��ͼ����ţ�TP242.6 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S2-0295-06
Over-obstacle capacity of composite wheeled submarine vehicle
YANG Yao-dong, JIANG Yong, FENG Ya-li, ZHANG Wen-ming, CHANG Ju
(School of Mechanical Engineering, University of Science and Technology Beijing,
Beijing 100083, China)
Abstract: In allusion to complex and changing sediment environmental characteristics of cobalt-rich crusts and hydrothermal sulfide survey area in deep sea, a new high over-obstacle composite wheeled submarine vehicle was prepared. The main submarine vehicle is made by 4-composite wheels connected with an articulated frame. A static model of the composite wheels structure in the typical over-obstacle condition was established to obtain the effect of its main structural parameters on the over-obstacle capacity. MATLAB toolbox was used to optimize and design the composite wheels structural parameters to completely promote its over-obstacle capacity. Combined with the complex and changing environmental characteristics in deep sea, a composite wheeled submarine dynamics model after optimization as well as the simulation analysis with ADAMS was established, to obtain dynamic over-obstacle curves of the submarine vehicle. The results show that the vehicle has a strong over-obstacle capacity in the complex and changing deep sea environment.
Key words: composite wheeled submarine vehicle; composite wheels; over-obstacle capacity; simulation analysis
Ŀǰ����ɿ����з����ȵ㼯������Ӧ�丳��״̬������������[1-3]��������ѧ���о������߷�ʽ��Ҫ���Ĵ�ʽ����ʽ����ʽ������ʽ[4-5]�������˶�������ԡ������ļ��ԡ����Ƽ����ԣ�����������������ʽ�ṹ������ͨ��ʽ������ֻ��Խ���߶�С����̥�뾶�Ĵ�ֱ�ϰ����������С����ֱ̥���ĺ� �������ڸ��ӵ��κ�����������ͨ���Ի��� ��[9-11]����ˣ������������һ�־������������Խ��ģʽ�ĸ�����ʽ������������������������������Ӧһ�������λ��������ܲ����������Ʒ�ʽԽ��������̥�뾶��̨�ף����������ֱ̥���ĺ����ȸ��ӵ��Σ��������õ�����Ӧ����������Խ��������
1 ������ʽ�����������Ľṹ������ԭ��
������ʽ����������(��ͼ1)����4������ϵ�������൱�ڴ�ͳ��4��4������ÿ������ϵ���ö���Һѹ�������������������ʻʱ�൱��12��12���������ӵر�ѹ�ϴȿ��ڼ�Ӳ�ĵ�������ʻ���ֿ���ϡ���������ʻ�����ý½�ʽ���ܣ��˶���ͬʱ���Խ�Ϻͱ��ϵ��ȶ��ԡ�
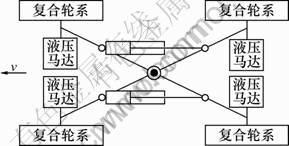
ͼ1 ������ʽ�����������ķ������
Fig.1 Concept design of composite wheeled submarine vehicle
������ϵ����(��ͼ2)�е�3������W1��W2��W3����1����2�����������¿�ʵ��һ���̶ȵĿռ�λ�ñ仯���Ӷ��������Ӷ������µ�Խ����ʻ��
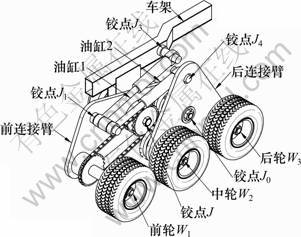
ͼ2 ��������ṹʾ��ͼ
Fig.2 Structure diagram of composite wheels
2 ���������������Ľṹ�Ż�
2.1 ������ֱԽ�϶����ֽ�
��ֱԽ�ϸ߶������ֺ���������Խ�����ܵ�һ����Ҫָ��[12]��Ϊ�˶��������ʽ���������������(��ͼ3)���нṹ�Ż������ȶ�������ֱԽ��ʱ����������������з���������ֱԽ�Ϸֽ�Ϊ5�ֶ���(����1)��
2.2 �ؼ������������������غɼ���
������������ʱ�����¼��裺�ٴ�ֱԽ����ת��ͬʱ��ɣ�����ֱԽ��������ת������أ�����2��������״̬������1�Ĵ�������ɶ�������ֱԽ�Ϲ����н���Ҫ��3������1��3��4�������������¡�
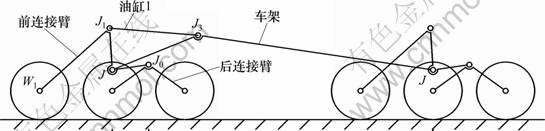
ͼ3 ��������ṹ�˶���ͼ
Fig.3 Kinematics diagram of composite wheels mechanism
��1 ��ֱԽ�����鶯���ֽ�
Table 1 Analytical action of vertical over-obstacle wheels
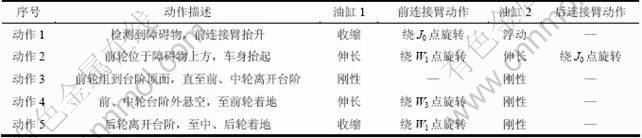
2.2.1 ǰ���ӱ�̧��(����1)��������
����������ӱ�����J0Ϊԭ��(��ͼ4)��Ť��ƽ�ʽΪ
![]() (1)
(1)
ʽ�У�T1Ϊ������F1�뷴������![]() ����ż��T1=F1h1��h1ΪF1��
����ż��T1=F1h1��h1ΪF1��![]() ��ż֮��ľ��룬�����ۣ�m��GΪ�����������ϵ������������а�1/4��������N��l1ΪJ��J0��ˮƽ�����ϵľ��룬m��GwΪ��̥������N��
��ż֮��ľ��룬�����ۣ�m��GΪ�����������ϵ������������а�1/4��������N��l1ΪJ��J0��ˮƽ�����ϵľ��룬m��GwΪ��̥������N��
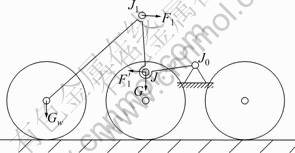
ͼ4 ����1ǰ���ӱ۵���������
Fig.4 Stress analysis of front connecting arm under condition 1
2.2.2 ̨������(����2)����������
������ǰ������W1Ϊԭ��(��ͼ5)��Ť��ƽ�ʽΪ
![]() (2)
(2)
ʽ�У�T2Ϊ������F2�뷴������![]() ����ż��T2=F2h2��h2ΪF2��
����ż��T2=F2h2��h2ΪF2��![]() ��ż֮��ľ��룬�����ۣ�m��GΪ�����������ϵ������������а�1/4��������N��l2ΪJ��W1��ˮƽ�����ϵľ��룬m��
��ż֮��ľ��룬�����ۣ�m��GΪ�����������ϵ������������а�1/4��������N��l2ΪJ��W1��ˮƽ�����ϵľ��룬m��
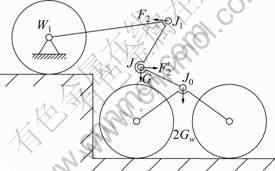
ͼ5 ����2ǰ���ӱ۵���������
Fig.5 Stress analysis of front connecting arm under condition 2
2.2.3 ̨������(����4)����������
�������������W3Ϊԭ��(��ͼ6)��Ť��ƽ�ʽ���£�
![]() (3)
(3)
ʽ�У�T4Ϊ������F4�뷴������![]() ����ż��T4=F4h4��h4ΪF4��
����ż��T4=F4h4��h4ΪF4��![]() ��ż֮��ľ��룬�����ۣ�m��GΪ�����������ϵ������������а�1/4��������N��l4ΪJ��W3��ˮƽ�����ϵľ��룬m��
��ż֮��ľ��룬�����ۣ�m��GΪ�����������ϵ������������а�1/4��������N��l4ΪJ��W3��ˮƽ�����ϵľ��룬m��
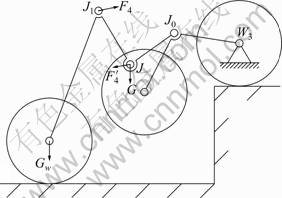
ͼ6 ����4ǰ���ӱ۵���������
Fig.6 Stress analysis of front connecting arm under condition 4
2.3 Һѹ���г̼�����µ㶨λ
2.3.1 Һѹ�����������
����ͬѹ���£�Һѹ�����������ѹ��������������ǻ���и�ǻ�ĺ������й�[13]����ô��Һѹ���������ѹ��(Fps)Ϊ
![]() (4)
(4)
ʽ�У�pΪҺѹϵͳѹ����Pa��SpsΪ��ǻ��������m2��
����ͬѹ���£�Һѹ�������������(Fpl)Ϊ
![]() (5)
(5)
ʽ�У�SplΪ�и�ǻ��������m2��
��Һѹϵͳ���ṩ�����ѹ���£������¹�ϵ��
![]() (6)
(6)
��ʽ(6)�Ƶ�����
![]() (7)
(7)
ʽ�У���ΪҺѹ���ٱȣ�ȡ��=1.46��
�ɹ���1������2����4�ķ�����֪��Һѹ���������ѹ����������ڹ���2�������������������ڹ���4��������2�빤��4��Ť�ؼ��㹫ʽ����ʽ(7)�ã�
![]() (8)
(8)
2.3.2 ���鶨λ��������ѧģ��
������������������������ķ�������֮������ۣ���h2��h4�ij��ȣ������쳤�����йأ������½ӵ������J���λ���йء�
��֪�ӹ���2��������̴���������4ֹ���������Ĺ��̣�ʹ��ǰ���ӱ���ת52?������JJ1��![]() (ͼ7)����ת���̡�ͼ7��J�㵽JJ1�ľ��뼴Ϊ����h2��J�㵽
(ͼ7)����ת���̡�ͼ7��J�㵽JJ1�ľ��뼴Ϊ����h2��J�㵽![]() �ľ��뼴Ϊ����h4��
�ľ��뼴Ϊ����h4��
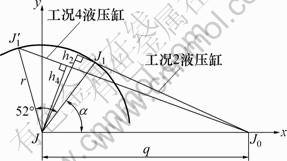
ͼ7 ���鶨λ�IJ�����ϵ
Fig.7 Parametric relationship of wheels position
ͨ���������������֮��Ĺ�ϵ[14-16]����ͼ7��ʾ��J��Ϊԭ�㣬JJ1��ȷ���µ�J1���λ�õIJ�������r��ʾ��JJ3��ȷ���µ�J3���λ�õIJ�������JJ3�ľ�����q��ʾ����ô������ֱ�ΪJ1(rcos ��, rsin ��)��J3(q , 0)���ɹ������ֱ�߹�ʽ���J1J3ֱ�߹�ʽΪ
![]() (9)
(9)
ʽ�У�rΪJJ1���ȣ�m��qΪJJ3���ȣ�m����ΪJJ1��JJ3�нǣ�(��)��
�ɵ㵽ֱ�ߵľ��빫ʽ�ó�����h2��
![]() (10)
(10)
��ʽ(10)չ����д��r�ķ������£�
![]() (11)
(11)
�μ�ͼ7��![]() ����Ϊ(rcos(��+52), rsin(��+52))��
����Ϊ(rcos(��+52), rsin(��+52))��![]() ֱ�߹�ʽΪ
ֱ�߹�ʽΪ
![]() (12)
(12)
�ɵ㵽ֱ�ߵľ��빫ʽ�ó�����h4��
![]() (13)
(13)
��ʽ(13)չ����д��r�ķ������£�
![]()
![]() (14)
(14)
2.4 ����µ㶨λ�����Ż�
���ʽ(8)��ʽ(11)��ʽ(14)������MATLAB������JJ3����q��JJ1����r�Լ�JJ1��JJ3�нǦ�����֮��Ĺ�ϵ����������ͼ8��ʾ��
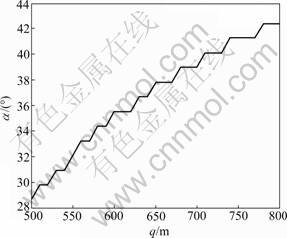
ͼ8 q����Ĺ�ϵ����
Fig.8 Relationship between distance (q) and angle (��)
����ѡ��q=730��r=320����=40�㡣��Ӧ��ͼ3�У��ο����ܸ߶ȣ�J3���J����ֱ����ľ���Ϊ265 mm������JJ3����Ϊ730 mm����������J3���J��ˮƽ����Լ����680 mm����J3����Ϊ(265, 680)��JJ1����Ϊ320 mm��J1�������J��ˮƽ�������Ϊ18.3 mm�������J����ֱ�������Ϊ479.5 mm��J1����Ϊ (-18.3, 319.5)��
3 ������ʽ����������adams������֤
��ǰ��Ը�������ṹ�ߴ��Ż���ƵĻ����ϣ���adams�н���������ʽ����������ѧ����ģ�ͣ������������ά���ν��з����������ֱ̥��Ϊ420 mm����ֱԽ�ϸ߶�Ϊ500 mm��ͼ9��ͼ10��ʾΪ��ǰ��1�ͽµ�J�ֱ���X�����Y�������ѧ�������ߣ�ͼ11��ʾΪ��ǰ��1�ͽµ�J��������ֵ�Ա����ߡ�
��ͼ9��֪����ǰ��1��ʼ��Խ̨��ʱ��������������̨���������Ѹ�ټ�С�����µ�J��Խ��ʱX�����������С������ͬ�������෴���ɴ˿�֪����ǰ��1��ʼ��Խ̨��ʱ���������ַ�ֵ������Խ��ʱ������ת�ƣ���ǰ��1��Y�����������С(��ͼ10)�����µ�J���������仯��С�����Ҹ���̥Խ��˲��IJ���Ҳ�Ƚ�С����ǰ��1Խ��ʱ����ǰ��1�����ķ�ֵԼΪ5 250 N���µ�J��������ֵԼΪ3 700 N���µ�J��������ֵҪԶС����ǰ��1����������ֵ����ͼ11��������ʽ�������������н�ǿ��Խ����������Խ��ʱ�ɱ��ֳ������ƽ�ȡ�
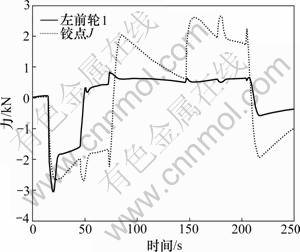
ͼ9 ��ǰ�ֺͽµ�X�������ѧ��������
Fig.9 Curve of X-component dynamics characteristic for left front wheel and joint J
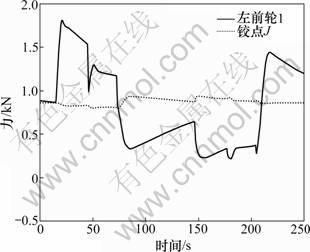
ͼ10 ��ǰ�ֺͽµ�Y�������ѧ��������
Fig.10 Curve of Y-component dynamics characteristic for left front wheel and joint J
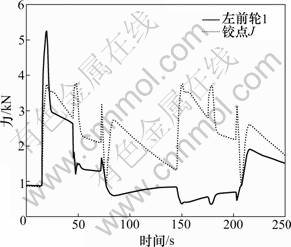
ͼ11 ��ǰ�ֺͽµ�J��������ֵ�Ա�����
Fig.11 Curve of force amplitude comparison between left front wheel and joint J
4 ����
(1) ���һ�ָ�����ʽ����������������ͨ��ʽ��������ȣ��û����Ժ����ӵ��ξ��нϸ�Խ�����ܣ����ʺϲ�ͬ�ĺ����ʡ�
(2) ����ֱԽ�Ϲ��̽��ж����ֽ⣬��������������Ͷ�������ѧģ�ͣ��õ�Ӱ��Խ�����ܵ���Ҫ�ṹ���������г̺ͽµ�λ�ã����Խṹ���������Ż���
(3) ����������ʽ������������adams����ģ�ͣ�����ֱ̥��Ϊ420 mm ʱ����ֱԽ��500 mm���µ㴦����������С����̥�����������������������ɼ�������ʽ����������ͨ��ʽ��Ȳ������н�ǿ��Խ���������Ҿ��нϸߵ�ͨ���ȶ��ԡ�
�ο����ף�
[1] Tarokh M, McDermott G, Hayati S, et al. Kinematics modeling of high mobile Mars rover[C]//IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE, 1999: 992-998.
[2] Farritor S, Hacot H, Dubowsky S. Physics-based planning for planetary exploration[C]//Proceedings of the 1998 IEEE International Conference on Robotics and Automation. 1998: 278-283.
[3] Randel A, Brain D, Ary M, et al. Mars exploration rover mobility development: Mechanical mobility hardware design, development, and testing[J]. IEEE Robotics and Automation Magazine, 2006, 13(2): 19-26.
[4] Volpe R. Rover technology development and mission infusion [C]//IEEE ICRA 2005 Planetary Rover Workshop. Barcelona, Spain, 2005.
[5] Nohmi M, Miyaharat A. Modeling for lunar lander by mechanical dynamics software[C]//AIAA Modeling and Simulation Technologies Conference and Exhibit 2005. California: AIAA, 2005: 61-68.
[6] �ս���, ����ȫ, �ߺ���, ��. ��Բ��-Բ��ʽ�������[J]. ��������ҵ��ѧѧ��, 2006, 38(1): 4-7.
TAO Jian-guo, DENG Zong-quan, GAO Haibo, et al. Design of a lunar. Rover with six cylinder-conical wheels[J]. Journal of Harbin Institute of Technology, 2006, 38(1): 4-7.
[7] ����ȫ, ������, �ߺ���. ����̽�����ҡ�����ܵ��о��뷢չ[J]. �ѧ��, 2008, 29(6): 1655-1700.
DENG Zong-quan, LI Suo-jun, GAO Hai-bo. Research and development of passive rocker suspension of planetary exploration rover[J]. Journal of Astronautics, 2008, 29(6): 1655-1700.
[8] ����ȫ, �ߺ���, ���ٴ�, ��. ������ʽ����Խ����������[J]. �������պ����ѧѧ��, 2004, 30(3): 197-201.
DENG Zong-quan, GAO Hai-bo, WANG Shao-chun, et al. Analysis of climbing obstacle capability of lunar rover with planetary wheel[J]. Journal of Beijing University of Aeronautics and Astronautic, 2004, 30(3): 197-201.
[9] ��С��, ̸����, �����, ��. ȫ������ʽ�ƶ������˵��˶�ѧ��ģ�����[J]. ��е����ѧ��, 2008, 44(6): 148-154.
SONG Xiao-kang, TAN Da-long, WU Zhen-wei, et al. Kinematics modeling and analyses of all-terrain wheeled mobile robots[J]. Chinese Journal of Mechanical Engineering, 2008, 44(6): 148-154.
[10] ����ΰ, ����, �����. ��������̽��˶�ѧ��ģ�����[J]. �ѧ��, 2003, 24(5): 456-462.
WANG Zuo-wei, LIANG Bin, WU Hong-xin. Kinematical modeling and analysis of six-wheel lunar rover[J]. Journal of Astronautics, 2003, 24(5): 456-462.
[11] ������, �����, ������. HIT-1�������˶�ѧ����[J]. ��������ҵ��ѧѧ��, 2003, 35(9): 1098-1101.
CAI Ze-su, HONG Bing-rong, L? De-sheng. Kinematic analysis of HIT-1 lunar rover[J]. Journal of Harbin Institute of Technology, 2003, 35(9): 1098-1101.
[12] Volpe R, Balaram J, Ohm T, et al. Rocky 7 Mars rover prototype[C]//IEEE International Conference on Intelligent Robots and Systems. Piscataway, NJ:IEEE, 1996, 3: 1558-1564.
[13] LI Yong-quan, LIU Jian-zhong, YUE Zong-yu. NAO-1: Lunar highland soil simulant developed in China[J]. Aerosp Engrg, 2009, 22(1): 53-57.
[14] ����. ������ѧ[M]. ����: ����������ѧ������, 2001: 85-87.
ZHANG Tie. Robotics[M]. Guangzhou: South China University of Technology Press, 2001: 85-87.
[15] Lizuka K. Experimental study of wheeled forms for lunar rover on slope terrain[C]//Advanced Motion Control. The 9th IEEE International Workshop. 2006: 266-271.
[16] Baller R, Leung W, Barfoot T. Experiment and simulation results of wheel soil interaction for planetary rovers[C]//Proceedings of IROS. Edmonton, 2005: 586-591.
(�༭ ������)
�ո����ڣ�2011-06-15�������ڣ�2011-07-15
������Ŀ��������Ȼ��ѧ����������Ŀ(50874006)�����ʺ����������о�������ʮһ�塱��Ŀ(DYXM-115-04-02-03)
ͨ�����ߣ�������(1967-)��Ů�������ˣ����ڣ��������������о����绰��010-62332467��E-mail: ylfeng126@126.com
ժҪ���������ܽ�Ǻ���Һ���������Ӷ��ĵ��ʻ����������Ʊ�һ�ָ�����ʽ�������������ú���������������4�鸴��������½�ʽ����������ɣ���������ֱԽ�Ϲ����¸�������ṹ�ľ���ѧģ�ͣ��õ�Ӱ����Խ�����ܵ���Ҫ�ṹ����������MATLAB�Ը�������ṹ���������Ż���ƣ���ߺ�����������Խ�����ܣ��������Ӷ��ĵ��ʻ�������������adams�Ը�����ʽ�������������ж���ѧ��ģ�ͷ����������ú�����������ֱԽ�ϵĶ���ѧ�������ߡ��о�������������������ڸ��Ӷ�������ʻ����¾��н�ǿ��Խ�������ͽϸߵ�ͨ���ȶ��ԡ�
