
�в��ų������Ĵ�������ϵͳ�ռ�ų���ѧģ��
�� ��1, 2��̷��ƽ1����̷ϲ1��������1
(1. ���ϴ�ѧ ���繤��ѧԺ������ ��ɳ��410083��
2. ��ɳ��ѧ ���繤��ϵ������ ��ɳ��410003)
ժ Ҫ��
ժ Ҫ��Ϊ��ߴ��϶����ת�������´�������ϵͳ�Ŀɿ��ԣ�����в��ų������Ĵ��϶���������������о���������ϵͳ�ռ���ѧģ�͡����ȣ�����ϵͳ�����ż�(�����)�ż�״̬�ʹӶ��ż�(������)ת��״̬֮��Ĺ�ϵ��ȷ������������ת���ĵ����4���ż�״̬���л�˳����Σ����ڴ�·����ԭ����ͨ���ų������ͽ�ģ���Ե����4���ż�״̬֮һ��NS(N��ʾ����SΪ�Ҽ�)Ϊ�����Ե����Ŀռ�ų��ֲ������о��������ռ�ų���ѧģ�ͣ������MATLABΪƽ̨��4���ż�״̬�Ŀռ�ų���ѧģ�ͽ�����⣬���������ʵ�����ݽ��жԱȡ��о���������������ռ�ų���ѧģ������ȷ�ġ�
�ؼ��ʣ�
�в��ų��������������ռ�ų�����ѧģ����
��ͼ����ţ�TM351 ���ױ�־�룺A ���±�ţ�1672-7207(2009)06-1573-07
Space magnetic field��s mathematical model of magnetic drive system driven by traveling wave magnetic field
XU Yan1, 2, TAN Jian-ping1, LI Tan-xi1, LIU Yun-long1
(1. School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China;
2. Department of Mechanical and Electrical Engineering, Changsha University, Changsha 410003, China)
Abstract: In order to improve the magnetic drive system��s reliability under the condition of large gap and high speed, the large gap magnetic drive technology, which is driven by traveling wave magnetic field, was brought forward. The space magnetic field��s mathematical model of magnetic drive system was studied. Firstly, the relationship between the magnetic pole state of active magnetic pole (electromagnet) and the running state of passive magnetic pole (permanent magnet) was analyzed. The electromagnet��s four magnetic pole state and switch sequence, which can drive permanent magnet rotate, were ascertained. Secondly, taking one of magnetic pole state NS (N denotes electromagnet��s left magnetic pole and S right magnetic pole) as an example, the distribution of space magnetic field was studied. In addition, the mathematical model of space magnetic field was set up based on the magnetic circuit fundamental and using the method of magnetic analysis and modeling. Lastly, the four states�� mathematical model of space magnetic field was solved by using the MATLAB. After the solving result and experiment data were compared, the results show that the space magnetic field��s mathematical model is correct.
Key words: traveling wave magnetic field; magnetic drive; space magnetic field; mathematical model
���������Ǹ����ִ���ѧ�д�������ͬ���������������ԭ�����������еʽ����ΪĿ�ģ�Ӧ�����Ų��ϻ��Ż����������Ĵ������ã�ʵ���������طǽӴ�ʽ���ݵ�һ���¼���[1-2]��Olsen��[3]�����һ�����ô����������ɾ����ƶ��������ȶ����Ե�Ҷ������������ʽѪ�á���Ѫ�þ���һ��������ת��Ҷ�֣���Ҷ���ڴ��Զ������γɵĿռ��ܹ��ﵽ����״̬���Ժ���[4]�����ϡ�����ų��ֳ��������ͽ��������ų��ִ������ڳ��ֳ��������У�����Ϊ����༫��ŵ�Բ�������壬����ΪN����S�����Ĵ�״���壬ʵ�ֽ����ᴫ���ij��ֲ���˫������༫����� �ţ�Karel[5]������ת�ų���ʽ��ʵ�ַ��������ڲ��������������õ�λ�Ʒ��̣�������ų������ݵĴų�������ͨ������֤���˷������ų����ķ�������ȷ�ġ�������������ϵͳ�������ż�����������ת�����������������Բ����������ֱ��װ�ڵ����������ϣ���ֱ���ɵ��������ת�����Ӷ�ʵ����Ӷ�����������ϴ������������Ӵż���Ͼ�������ʱ����ͳ�Ĵ�������ϵͳ������ǿ����Բ���ų��ֵĴų�ǿ�ȣ�����ʹ�ⲿ�ų����ִ��϶����ʱ����Ҫ��������������������������Ĵų��ر�ǿʱ��������������ת�ĵ���ڲ��ų�������ϣ��Ե����Ӱ��ʮ�����ԣ�������������ԣ��ڸ��١����϶���� �£�Ŀǰ��������ʽ���ܱ�֤ϵͳ��ʱ��ؿɿ�������ϵͳ�Ŀɿ��Բ��ߡ�
1 �в��ų������Ĵ�������ϵͳʵ�ַ���
1.1 ϵͳ���ɼ�Ӧ��
��Բ����������Ϊ�������������ͼ1��ʾ�Ĵ��϶��������ϵͳ[6]������������װ����У����ɴ�������ͬ��IJ���һ��ת�����봫ͳ�����ŵ����ȣ����ִ���������ʽ������ص������������Ӵż�֮���϶�ϴ�
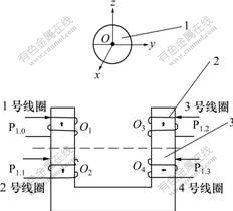
1���Ӷ��ż�(������)��2����Ȧ��3�������ż�(�������о)
ͼ1 ��������ϵͳʾ��ͼ
Fig.1 Schematic diagram of magnetic drive system
����������Ҵż��л��������£���C��������������4����Ȧ(�������C������y����ijߴ���������������y����ߴ�Ϊ57 mm�����ΪC57����壬��ͬ������ϵ��ͼ1��ʾ)�����ݸ���Ȧ�ϵ�������IJ�ͬ���ɵ�Ƭ��P1.0�����Ƶ�1����Ȧʵ���������ż���ΪN��״̬���ɵ�Ƭ��P1.1�����Ƶ�2����Ȧʵ���������ż���ΪS��״̬���ɵ�Ƭ��P1.2�����Ƶ�3����Ȧʵ���������ż��Ҽ�ΪS��״̬���ɵ�Ƭ��P1.3�����Ƶ�4����Ȧʵ���������ż��Ҽ�ΪN��״̬��ͨ����Ȧ�ϵ�ѹ(����)ʱ��ĸı䣬ʵ�������Ҵų�״̬���л��������в��ų��������Ӷ��ż�(������)��ת��
��ϵͳ����������ʽѪ�õ�����������ʽѪ����ͼ2��ʾ������С�Ҷ�ֺ�������ȹ��ɡ���������ʽѪ�õ�������װ�ú�������������֮����������Ƥ���ż������Զ���ֲ����˲��õ��ߴ��������������������ִ�������ϵͳ���ŵ㡣
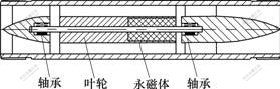
ͼ2 ����ʽѪ��ʾ��ͼ
Fig.2 Schematic diagram of axial-flow blood pump
1.2 ϵͳ�������̷���
ͼ3�нǶȦձ�ʾ�����弸�����������������������ߵļнǣ���ͼ����ʾ�������1Ȧת�����̷�Ϊ4�Σ�ת�Ƿֱ�Ϊ![]() ��
��![]() ��
��![]() ��
��![]() ��
��
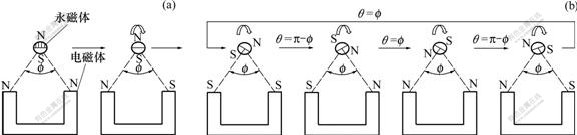
(a) ���̣�(b) ѭ������
ͼ3 ��������ϵͳ��ѭ����������
Fig.3 Start and circularly working process of magnetic drive system
�Ծ����ŵ�����������Ϊ������ͼ3(a)�У�����ͨ�������ż���NN״̬���ڴų��������£���������������ϼ�ΪN���¼�ΪS��״̬����ͨ�������ż���NS״̬ʹ������˳ʱ����
��ͼ3(b)�У���������S���������������������ĵ����ߴ�ֱ��������N����S���Ľ���ʱ���������ż�����ΪSS״̬��ʹ�����������˳ʱ�뷽��ת������������N�����������������Ҽ����ĵ����ߴ�ֱ��������N����S���Ľ���ʱ���������ż���ΪSN״̬�������彫������˳ʱ��ת������������N���������������������ĵ����ߴ�ֱ��������N����S���Ľ���ʱ���������ż���ΪNN״̬�������彫������˳ʱ��ת������������S�����������������Ҽ����ĵ����ߴ�ֱ��������N����S���Ľ���ʱ���������ż���ΪNS״̬�������彫������˳ʱ��ת������S���������������������ĵ����ߴ�ֱ��������N����S���Ľ���ʱ��������ת����360?�������1������ѭ�������ԣ������Ĵż�״̬��NN��NS����ʵ��������������������Ĵż�״̬��SS��SN��NN��NS����ʵ���������ת��ѭ�����ı�����Ĵż�״̬�л�˳��ʵ��ת��ĸı䣻�ı�����Ĵż�״̬�л�Ƶ�ʣ���ʵ��������ת�ٵĵ��ڡ�
2 ϵͳ�ռ�ų���ѧģ�͵Ľ���
��ͼ3��֪�������ż�(�����)����Ҫ����SS��SN��NN��NS 4��״̬ѭ���仯�Ŀռ�ų�������ʹ�Ӷ��ż�(������)��һ���Ĺ�������ת������������������ʽ�Ŀռ�ų���ѧģ���Ƕ���������ϵͳ�����о��Ļ���[7-8]��
���⣬����ϵͳ���������Ǻ���������������һ��ֱ��ָ�꣬������������ռ�ų�ǿ�ȵĴ�С������[9-11]�����ԣ�������������ϵͳ�ռ�ų�����ѧģ�ͣ���������ռ�ų��ķֲ�����ȷ��������͵����Ŀռ�������λ�ã��Ӷ�Ϊʹϵͳ��һ�������µ����������ﵽ����ṩ���������ݡ�
�ӵ���ͨ����Ȧ�ڿռ���һ�㴦�����Ĵų�ǿ�ȼ������[12-15]������Ȧ����Ϊ����ԭ�㽨����ͼ4��ʾ������ֱ������ϵ����M������Ϊ��
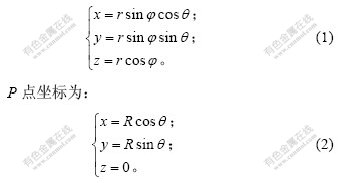
ͼ4 ������Ȧ����������ֱ������ϵ
Fig.4 Single-turn coil and rectangular coordinate system
���ݱϰ�-������������������Ȧ�ڿռ�M���������ĴŸ�Ӧǿ��ʸ��BΪ��

��ʽ(4)��(5)����ʽ(3)������ʽ(3)�����֣���ɵ�ͨ����Ȧ�ڿռ��������ĴŸ�Ӧǿ�ȱ���ʽΪ��

��ʽ(1)����ʽ(6)���Ա���ʽ��ֱ������ϵ�½���ת�������ݴų�����ԭ������ͼ1����ʾ��4��N����Ȧ�������Ŀռ�ų�Ч�������Ƶ����Ƿֱ���������O1, O2, O3��O4��N����Ȧ�����������ڸ���Ȧ���ĵ�O1, O2, O3, O4����4����ͼ1��ʾ��ֱ������ϵ����ÿ��N����Ȧ�����ĴŸ�Ӧǿ��Ϊ��

������C57�����(����Ϊ400��ͨ�����Ϊ 1.1 A)Ϊ������NS״̬�£������ռ�Ĵų��ɿ�������P1.0��P1.2�����Ƶ�2��N����Ȧ�����ų����Ӳ����ģ�����ʱ����Ӧ��ʽ(7)����2��N����Ȧ���ĵ�O1��O3����2����Ȧ������O���������������弸������Ϊԭ���ֱ������ϵ(��ͼ1��ʾ)����O1��O3ֱ������ϵƽ�����������弸������Ϊԭ���ֱ������ϵ����������Ȧ�����Ŀռ�ų����е��ӣ��Ӷ��ɵ�NS״̬�£��в��ų������Ĵ�������ϵͳ�ռ�ų�����������ʽΪ��
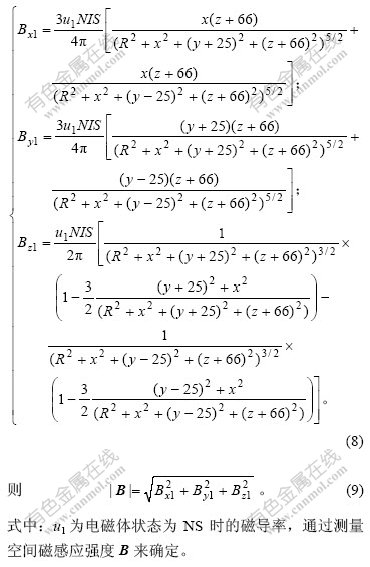
ͬ�����ɵõ�SS��SN��NN״̬�µĴŸ�Ӧǿ����ѧģ�͡�
3 ϵͳ�ռ�ų��ķֲ�
3.1 ʵ������
ʵ������Ϊ��C57�����(4����Ȧ������Ϊ400����Ȧͨ�����Ϊ1.1 A)��DF1730SC5Aֱ����ѹ��Դ����Ƭ������ϵͳ�����ʷŴ��·(�����ڿռ����4��״̬�Ĵų�)��HT100������˹���ƣ�������ʵ��̨(ʵ��x��y��z 3�������λ�Ƹı�)��
3.2 ʵ�����ݼ��������
���·���������MATLAB������ʽ(8)��(9)���н������õ���ʵ��ֵ����HT100������˹���Ʋ�á���ͼ1��ʾ������ϵ�У�����ϵͳ����ģ�ͼ��ż��ֲ���֪���ռ�ų���x��������ԭ��Ϊ���ĶԳƵģ�������x�������˥�����Ӷ���ȷ��x����ų���ǿ��Ӧλ��ԭ��O����ϵͳ�����ż��ռ�ų��ֲ���ѧģ���о�����ҪĿ����ȷ��ϵͳ�������������������Ӵż����λ�ã����ԣ�����������x��������궨Ϊ0 mm��ֻ���y��z����Ŀռ�ų��ֲ����ɽ����о���
3.2.1 �����4���ż�״̬�Ŀռ�ų���z����� �ֲ�
����������x=0 mm��y=0 mm��z���귢���仯ʱ�ĴŸ�Ӧǿ������ͼ5~8��
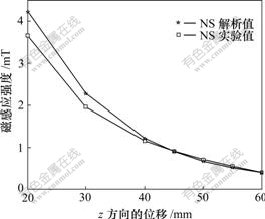
ͼ5 �����NS�ż�״̬�µĴų��ֲ�(z����)
Fig.5 Distributions of magnetic field under magnetic pole state NS of electromagnet (z direction)
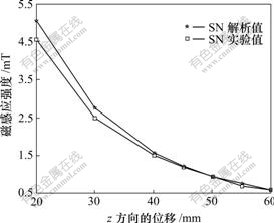
ͼ6 �����SN�ż�״̬�µĴų��ֲ�(z����)
Fig.6 Distributions of magnetic field under magnetic pole state SN of electromagnet (z direction)
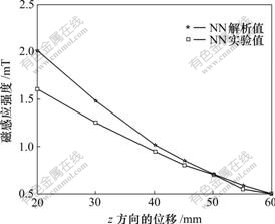
ͼ7 �����NN�ż�״̬�µĴų��ֲ�(z����)
Fig.7 Distributions of magnetic field under magnetic pole state NN of electromagnet (z direction)
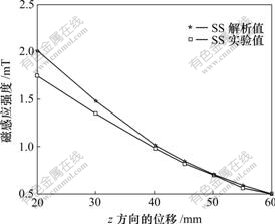
ͼ8 �����SS�ż�״̬�µĴų��ֲ�(z����)
Fig.8 Distributions of magnetic field under magnetic pole state SS of electromagnet (z direction)
a. �������4�ִż�״̬�µĿռ�Ÿ�Ӧǿ�����ڴ�����ͨ������ʱ�������Ĵ����ͨ������ʱ�Ĵ��Ҵ������Ŵ������ڿ����е�·�����������ŵ��ʼ�С�����ԣ���������͵������Ͼ���(z�����λ��)����ʱ���ռ���ͬһ������ĴŸ�Ӧǿ�ȼ�С���������ž��������С������Խ��ԽС����������ƽ��(��ͼ5~8)��
b. �������ż�״̬ΪNS(1�ź�3����Ȧͨ��)��SN(2�ź�4����Ȧͨ��)ʱ�������������Ŀռ�ų���z����仯����һ�£�������SN״̬�µ����Ĵŵ��ʽ�NS״̬��ǿ�����ԣ�SN״̬�������Ĵų������ϱ�NS״̬��ǿ(��ͼ5~6)��
c. �������ż�״̬ΪNN(1�ź�4����Ȧͨ��)��SS(2�ź�3����Ȧͨ��)ʱ������ͨ����Ȧ�ռ�λ�óʶԳƹ�ϵ���ڴ�ʵ�������£�z����ռ�������㴦�������ĴŸ�Ӧǿ�Ⱥͱ仯������ͬ(��ͼ7~8)��
3.2.2 �����4���ż�״̬�Ŀռ�ų���y����� �ֲ�
����������x=0 mm��z=60mm��y���귢���仯ʱ�ĴŸ�Ӧǿ������ͼ9~12�����У�y=��24 mm��ΪC57��������Ҵż������Ϸ���
a. �������ż�״̬ΪNS(1�ź�3����Ȧͨ��) ��SN(2�ź�4����Ȧͨ��)ʱ�������������Ŀռ�ų���y����仯����һ�£�����ԭ�㴦��С����������Ҵż������Ϸ��Ÿ�Ӧǿ����������NS
��SNͨ��״̬�µĿռ�Ÿ�Ӧǿ����y����ı仯������������ԭ��Ϊ���ģ����˳ʶԳƷֲ�������������������Ӷ����ӣ������ӵķ��Ȳ�������SN״̬�µ����Ĵŵ��ʽ�NS״̬��ǿ�����ԣ�SN״̬�������Ĵų������ϱ�NS״̬��ǿ(��ͼ9~10)��
ͼ9 �����NS�ż�״̬�µĴų��ֲ�(y����)
Fig.9 Distributions of magnetic field under magnetic pole state NS of electromagnet (y direction)

ͼ10 �����SN�ż�״̬�µĴų��ֲ�(y����)
Fig.10 Distributions of magnetic field under magnetic pole state SN of electromagnet (y direction)
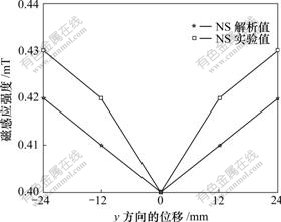
b. �������ż�״̬ΪNN(1�ź�4����Ȧͨ��)��SS(2�ź�3����Ȧͨ��)ʱ������ͨ����Ȧ��λ�ù�ϵ������2��ͨ��״̬�£�������������ż�֮��Ŀռ�Ÿ�Ӧǿ����y�������Ҫ�仯�����ǵ������ӻ��С������������Ҵż����Ϸ�λ�õĴų���������Χ��ǿһЩ�����ԣ�������ԭ������С�ķ�������һ�δų���ǿ���������ߣ���NN״̬��y����12~24 mm֮��ĴŸ�Ӧǿ�����ߣ�SS״̬��y����-12~ -24 mm֮��ĴŸ�Ӧǿ�����ߡ���ͼ11~12��
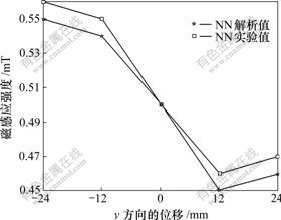
ͼ11 �����NN�ż�״̬�µĴų��ֲ�(y����)
Fig.11 Distributions of magnetic field under magnetic pole state NN of electromagnet (y direction)

ͼ12 �����SS�ż�״̬�µĴų��ֲ�(y����)
Fig.12 Distributions of magnetic field under magnetic pole state SS of electromagnet (y direction)
c. �������ż�״̬ΪNN(1�ź�4����Ȧͨ��)��SS(2�ź�3����Ȧͨ��)ʱ������ͨ����Ȧ�ռ�λ�õĶԳƹ�ϵ���ڴ�ʵ�������µ�y����ռ�������㴦�������ĴŸ�Ӧǿ�Ⱥͱ仯�����Ƿ��ԳƵġ���ͼ11~12��
ͨ�����ϸ��ֵ����ż�״̬�ĴŸ�Ӧǿ����ѧģ�ͽ���ֵ��ʵ��ֵ�ȽϿ�֪�����������غ϶Ƚϸߣ���������ԭ����Ҫ��ʵ��ʱ������λ������������ۺϱȽ�SS��SN��NN��NS 1�����ڵĿռ�ų�ǿ���������߷ֲ������֪��Ϊʹ��������ϵͳ���н�ǿ������������Ӧ��������������ǰ���£�ʹ�����Ӵż�z�������Ͼ��뾡����С�����⣬����ϵͳ��������͵����ľ���Ҫ��ȷ������ϵͳ�����Ӵż���Ͼ���(z�����ֵ)����������y�������ڡ�(5~10) mm֮�䣬��x��������0 mm������ʹ��������һ��ת�������ھ�����һ����ǿ�Ĵų��У��ô��ų����������������������������������ά��ת��״̬����һ������ͼ2�е�Ѫ��������ʵ��ʱ�õ�֤����
4 �� ��
a. ������ʽѪ������Ϊ�о����������һ���в��ų������Ĵ��϶��������ϵͳ������ϵͳ������4���ż�״̬�л�˳��ʹӶ�������ת��״̬֮��Ĺ�ϵ��ȷ��ϵͳ��ת���ת�ٵ��ڵķ�����
b. ���ݵ���ͨ����Ȧ�Ŀռ�ų����㷽��������ϵͳ�����4���ż�״̬�Ŀռ�ų���ѧģ�͡�Ӧ��MATLAB��������C57�����Ϊ��������������ϵͳ�ռ�ų���ѧģ�ͽ�����⡣��ϵͳ�ռ�ų���ѧģ�ͽ��������ʵ�������жԱȣ�֤�������õ�ϵͳ�ռ�ų���ѧģ�ͽ�ģ��������Ч�ģ�����������ѧģ������ȷ�ġ�
c. �ڲ���C57����塢z������Ͼ��벻���ǰ���£�����������y�������ڡ�(5~10) mm֮�䣬��x��������0 mm������ʹϵͳ��������������������ʽѪ���ܸ��ؽϸߵ�ˮ�������������о���������
�ο����ף�
[1] ���ȶ�, ������, ̷��ƽ. ������ų���ϵ�Ѫ������ϵͳ[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2007, 38(4): 711-714.
XU Xian-dong, GONG Zhong-1iang, TAN Jian-ping. Blood pump driven system based on extracorporeal magnetic filed couple[J]. Journal of Central South University: Science and Technology, 2007, 38(4): 711-714.
[2] �� ��, �� ��, �� ��. ������е�о�����[J]. ��е����ѧ��, 2003, 39(12): 31-36.
ZHAO Han, WANG Yong, TIAN Jie. Review of study on magnet machine and mechanism[J]. Chinese Journal of Mechanical Engineering, 2003, 39(12): 31-36.
[3] Olsen D B, Paul E A, Houston G W. Axial-flow blood pump with magnetically suspended, radically and axially stabilized impeller: US Patent 20050135948[P]. 2005-06-23.
[4] �� ��, �� ��, �� ��. �ų����ַ������ų��ִ��������������е�Ӧ��[J]. ��е����ѧ��, 2000, 36(8): 29-32.
ZHAO Han, TAO Jun, TIAN Jie. Application of magnet field integral method on analysis of gear transmission with rare earth magnet[J]. Chinese Journal of Mechanical Engineering, 2000, 36(8): 29-32.
[5] Karel F. A numerical study of flows driven by a rotating magnetic field in a square container[J]. European Journal of Mechanics B/Fluids, 2008, 27(4): 491-500.
[6] ̷��ƽ, �� ��. һ�ַǽӴ�ʽ���϶������������: CN 200810030545.1[P]. 2008-01-25.
TAN Jian-pin, XU Yan. A non-contact large floating interval magnetic force driving method: CN 200810030545.1[P]. 2008-01-25.
[7] ZHANG Hai-tao, Hiromi N, ZUO Yu-bo, CUI Jian-zhong. Coupled modeling of electromagnetic field, fluid flow, heat transfer and solidification during low frequency electromagnetic casting of 7������ aluminum alloys. Part 1: Development of a mathematical model and comparison with experimental results[J]. Materials Science and Engineering A, 2007, 448(1): 189-203.
[8] �¾���, �� ��. ���ܴ��ʵ绡¯���ܿ���ϵͳ[J]. �й���ɫ����ѧ��, 2002, 12(2): 393-397.
CHEN Jun-ling, LUO An. Intelligent automatic control system of large-power EAF[J]. The Chinese Journal of Nonferrous Metals, 2002, 12(2): 393-397.
[9] HE Jian-jun, YU Shou-yi, ZHONG Jue. Control parameter optimal tuning method based on annealing-genetic algorithm for complex electromechanical system[J]. Journal of Central South University of Technology, 2003, 10(4): 359-363.
[10] Liu C T, Lee S C. Magnetic field modeling and optimal operational control of a single-side axial-flux permanent magnet motor with center poles[J]. Journal of Magnetism and Magnetic Materials, 2006, 304(1): 454-456.
[11] WU Yan, ZHAO Xiang. Effects of electric field on recrystallization texture evolution in cold-rolled high-purity aluminum sheet during annealing[J]. Transactions of Nonferrous Metals Society of China, 2007, 17(1): 143-147.
[12] Thomas F P, Nini P, Anders S, et al. Two-dimensional mathematical model of reciprocating room-temperature active magnetic regenerator[J]. International Journal of Refrigeration, 2008, 31(3): 432-443.
[13] Chang H T, Lee C Y. Theoretical analysis and optimization of electromagnetic actuation in a valveless microimpedance pump[J]. Microelectronics Journal, 2007, 38(6): 791-799.
[14] Smolkin M R, Smolkin R D. Calculation and analysis of the magnetic force acting on a particle in the magnetic field of Separator[J]. IEEE Transactions on Magnetics, 2006, 42(11): 3682-3693.
[15] ����ƽ, �Կ���, ����ϲ. ��ż���Ӵų��ռ�ֲ�ģʽ[J]. ������, 2002, 22(2): 18-21.
REN Lai-ping, ZHAO Jun-sheng, HOU Shi-xi. The distribution pattern of magnetic dipole��s spatial magnetic field[J]. Hydrographic Surveying and Charting, 2002, 22(2): 18-21.
�ո����ڣ�2009-01-25�������ڣ�2009-04-09
������Ŀ�����Ҹ����о���չ�ƻ�(��863���ƻ�)��Ŀ(2006AA02Z4E8)��������Ȼ��ѧ����������Ŀ(50775223��50875266)����������ʿѧ�Ƶ�ר�����������Ŀ(20070533125)������ʡ������������Ŀ(08C138)����ɳ��ѧ������Ŀ(CDJJ-09010208)
ͨ�����ߣ�̷��ƽ(1963-)���У����������ˣ���ʿ����ʦ�����ڣ������ִ�����Һ���������뼼���о����绰��0731-88830292��E-mail: jptan@163.com
