
DOI: 10.11817/j.issn.1672-7207.2019.04.016
�������ߵ��ڻ��ƵIJ���������ģ�����������
����1��Ҷ���1, 2�����ε�1
(1. �й�ʯ�ʹ�ѧ(����) ��Ϣ����ƹ���ѧԺ��ɽ�� �ൺ��266580��
2. �й����ӿƼ����ŵ���ʮһ�о��� �ൺ�����豸�������ι�˾��ɽ�� �ൺ��266510)
ժ Ҫ��
��ģ�������㷨���ڵĿ����������������ߵ�������̬���Ƚϵ͵����⣬���һ�ֻ�������ϵͳ���ڻ��ƵIJ���������ģ�������㷨�����㷨�ڶ�̬���ڽν����������ϵͳ����Tϸ���������ڻ����������������������Ի�ý��ŵĿ���ϵͳ��̬���ܣ���̬���ڽ���������ϵͳ��ԭ���ԭ����������ƫ����Ϊ��ԭ�����з����Դ�����ͬʱ�����������������ģ���������������ȣ��Ӷ��˷�����ģ����������̬���Ȳ��ߵ�ȱ�ݡ�Ϊ��������ģ�������������㷨�Ŀ���Ч�������Ľ�����㷨Ӧ�������ﷴӦ���ķ������¶ȿ��ƶ����о��������������ڳ���ģ�������㷨��PID�㷨������ģ�������������㷨���нϺõĿ���Ч���ͽ�ǿ�Ŀ�����������
�ؼ��ʣ�
ģ������������������Tϸ����������ԭ�����
��ͼ����ţ�TP18 ���ױ�־�룺A ���±�ţ�1672-7207(2019)04-0881-11
Design of parameter self-turning fuzzy controller based on immune regulation mechanism
LIU Bao1, YE Huihui1, 2, CAI Mengdi1
(1. College of Information and Control Engineering, China University of Petroleum, Qingdao 266580, China;
2. Qingdao Xingyi Electronic Equipment Co. Ltd., 41st Institute of CETC, Qingdao 266510, China)
Abstract: In order to solve the problem that the controller parameters of conventional fuzzy control algorithm cannot be adjusted online and the steady-state accuracy was not high enough, a fuzzy self-tuning control algorithm based on immune regulation mechanism was proposed. In the stage of dynamic adjustment, the T cell regulation mechanism of biological immune system was used to adjust the controller parameters to achieve better dynamic performance of the control system. In the stage of steady regulation, based on the principle of antigen presentation, the input deviation of controller was processed nonlinearly, and the controller parameter was adjusted at the same time to improve its sensitivity, so as to overcome the defect of steady accuracy of conventional fuzzy controller. At last, the improved control algorithm was applied to the nonlinear temperature object of a bioreactor in order to testify its control performance. The results show that compared with the conventional fuzzy control algorithm and PID algorithm, the improved self-tuning fuzzy control algorithm based on immune regulation can achieve better control effect and stronger anti-interference ability.
Key words: fuzzy controller; self-tuning; T cell regulation; antigen presentation
��ʵ�ʹ�ҵ���������У������ںܶิ�ӵĿ���ϵͳ������ͨ�����д���ԡ������Լ�ʱ���ӳٵ����ԡ�����Ŀǰ�����Խ�����Щ���Ӷ���ľ�ȷ��ѧģ�ͣ���ʹ����ģ�͵Ĵ�ͳ���Ʒ�ʽ����ȡ������Ŀ���Ч����ģ�����ƾ��в�����ģ�͡���Ӧ����ǿ��³����ǿ���ص㣬�ڽ�����ӿ���ϵͳ������ƿ������ܷ���õ��˹㷺��Ӧ��[1]�����ǣ������ģ�������㷨���ڿ�����������ģ������һ��ȷ�������ܸ��ݹ����仯������Ӧ���ߵ���Ӱ�����Ч������̬���Ƚϵ͵�ȱ�ݡ�����������⣬������[2-3]�����Ŵ��㷨�����Ż�ģ���������������½�����[4]������Ⱥ�㷨�����Ż�ģ���������еĿ��ƹ�����Щ�Ż��㷨��Ѱ���ٶȽ������������㱻�ض���ʵʱ��������Ӧ���Ƶ���������Щ�Ż��㷨������ģ�ͣ���������ģ�ı��ض�����ȡ�ýϺõ��Ż�Ч�����������[5]���˫�߲�ֵ�㷨���һ�ֻ������߲�ֵ��ģ������ϵͳ���÷�����Ȼ�����ģ�����ƾ��ȣ���ʵ�ֹ�������Ҫ��Ͽ��ƹ���������㲻����㡣��������ϵͳ��һ����ϸ�����Ӻ��걸�ķ���ϵͳ�����нϺõ�����Ӧ�ԡ�³�����Լ������䡢�����Ե��ڵ��ص㡣��20����90���ĩ����������������ϵͳ���������˹�����ϵͳ�õ���Ѹ�ٵķ�չ�����������������ܿ������������㷨��̳��֡���������[6]������������ϵͳ�������������ģ������ԭ�������һ����ӱ��ģ���Ե������߷�������ϵͳ��ͨ������֤��������ƿ���������ڴ�ͳ�������ܹ���ø���Խ�Ŀ������ܡ���Զ���[7]��������ϵͳ�еĿ�¡ѡ��ԭ�����Ż�ģ��������������ʵ������Ӧģ�����ơ�̷Ӣ�˵�[8-11]����˻�������ģ��PID�Ľ������������⣬�����Ƶ�[12-14]����˻�������Ⱥ�㷨���������ƵIJ�������Ӧģ������ϵͳ�����ǣ���Щ�㷨�ڽ��ģ�����Ƽ���������Ӧ�ԺͿ��ƾ��ȷ����Դ���һЩ���㣬��Ҫ��һ���о���������ߡ�����������Դ�ͳģ�������������ڿ��ƹ����в�������Ӧ��������̬���Ƚϵ͵����⣬������������ϵͳ�е�������Ӧ������Tϸ���ĵ������ú�������ʻ��ƣ����һ������ģ�����������������������Ϳ��ƾ�������㷨���Ӷ������ģ���������ܡ�
1 ��������ϵͳ����ԭ��
����ϵͳ�ǻ���ִ������Ӧ�����߹��ܵ���Ҫϵͳ������ʶ����ų���ԭ������������������ϵͳ�Э������ͬά�ֻ����ڻ����ȶ�������ƽ��Ĺ��ܡ�����ϵͳ��ִ�е�����Ӧ����ָTϸ����Bϸ�����ܰ�ϸ��ʶ��ԭ�����������ֳ��ֻ���Ӧ�𣬲�����ԭ�������ȫ����[6]������Ӧ�����ϸ�����ߺ���Һ����2�֡����У���Һ���ߵ�Ӧ�������Ҫ��ͨ��Tϸ����ͬ��Ⱥ����������� ��[7]��Tϸ����Ϊ����ϸ��TH������ϸ��TS��TH��TSϸ���ֱ��Bϸ�������ú��������á��������Ŀ�ԭ����ԭ�ʵ�ϸ��(APC)���������ȻTHϸ�������ͷ��ܰ����ӣ������Bϸ���������壬APC�ʵݵĿ�ԭ���ܻ����ĻTSϸ�������TSϸ����THϸ����Bϸ�������������ã��Դ�����֤����ϵͳ�Ŀ��ٶ����ȶ��������ֵĿ�ԭ��Tϸ���ĵ���������ͼ1��ʾ������Ӧ��������¡�
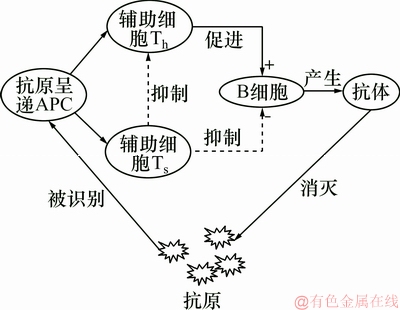
ͼ1 ��Һ���߹���
Fig. 1 Process of humoral immunity
1) ���߿�ԭ��ʡ�������Ӧ������ǰ�ڣ���Ҫ���������ϵͳ�����ڵ����ʽ��������ͷ������ı����һ�����̳�Ϊ����ʶ��ʵ���ϣ�����ʶ��ͨ����ԭ��ʻ�������ɡ���ԭ�����ָ�������ڵĿ�ԭ����ԭ���ϸ����ȡ���ӹ������������ĵ���ʽ���������ϸ�����棬���ձ�������ϸ��ʶ��Ĺ��̡���ԭ����ڻ��������Ӧ�����������ʮ����Ҫ�����ã�����ȡ���ӹ���������ԭ������ԭ��ʸ�T�ܰ�ϸ����Ȼ��ͨ��Tϸ���ĵ��ڲ���������ɿ�ԭ��������̡�
2) Tϸ���������ڡ���������Ӧ���̳��ڣ���ԭ�����ϴ�Tϸ����Ҫ��ٽ����ã��ٽ�Bϸ���Ļ�Բ����϶�Ŀ�����ٵ�����ԭ��������Ӧ���ڣ����ſ������������࣬��ԭ�������������٣�Tϸ����Ҫ���������ã�����Bϸ���Ļ�����ٿ���ķ��ڣ�ά������ϵͳ���ȶ��ԡ�
2 �������ߵ��ڻ��ƵIJ�������������ģ�����������
����������ϵͳ���ڹ����빤ҵ�����еĿ��ƹ����кܶ�����֮�������ڿ��Ƴ��ڽΣ�ϣ������ϵͳ����Ӧ����ܹ����ٵĽӽ�����ֵ������Сϵͳ��̬�����е�����ʱ�䣻�ڿ������ڽΣ�ϣ������ϵͳ����Ӧ����ܹ��ڲ���������������¿��ٴﵽϵͳ���ȶ�����״̬��������ϵͳ�����������̿��ƹ��̵ĵ���ʱ�䡣Ϊʹ����ϵͳȡ���ϺõĶ�̬���ܣ���Ҫ�����������ܹ��ڲ�ͬ����ʱ�ڽ������������������һ�ֻ�������ϵͳ���ڻ��ƵIJ���������ģ�������㷨(�������ģ�������������㷨)���������ߵ��ڵ�Tϸ������ԭ����ƿ�������������Ӧ�仯���ɡ�ͬʱ�������ģ������ϵͳ����̬���ƽδ��ڿ����������Ȳ�Ϳ��ƾ��ȵ͵����⣬�������ϵͳ���ڹ����еĿ�ԭ���ԭ������ϵͳƫ�������ʴ���������һ�������������������Ӷ�ʹģ�����������Ը��õ�ʶ�����ƫ�����߿��ƾ��ȡ���ˣ���һ����Ƹ�����ģ������������������ϵ�ܹ���ͼ2��ʾ����Ҫ������̬����ģ�顢��̬����ģ���Լ�����ģ��3���֡�
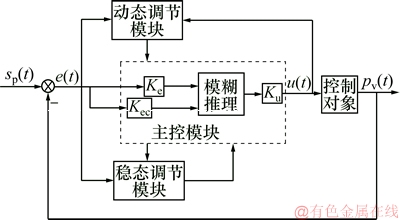
ͼ2 ��������������ģ������ϵͳ�ṹ
Fig. 2 Architecture of parameter self-tuning fuzzy control system
���У�����ģ��Ϊģ�����Ƶĺ��ģ��ڸ�ģ���н���ģ��������Լ����������Ⱥ�����������ƫ�ƫ��仯����ģ������ģ�������������������Ӷ��õ�����������������ڱ��ض���̬����ģ������Tϸ������ԭ���еĴٽ���������������������ģ����������Ӻͱ������ӣ�ʹ���ܹ�����ƫ��������Ӧ�ı䣻��̬����ģ�����ÿ�ԭ������ö�ƫ����з����Դ��������ݶ�̬����ģ��IJ�������������������ģ��IJ���ֵ���ڸÿ������У�������������Ϊ����ϵͳ���趨ֵsp(t)�빤�ն������ֵpv(t)��ƫ��e(t)����ƫ���൱������������ġ���ԭ�����������Ĵ���������Ke��Kec��Ku�൱��Bϸ����Ũ�ȣ�����Ke��Kec��Ku�ֱ�Ϊƫ�ƫ��仯�ʺͿ������������ı���������������ӣ������������ֵu(t)�൱����Һ����Ϊ������ԭ�������ġ����塱��
2.1 ����ģ��
Ϊ��ʵ��������ģ��ĺ��Ŀ������ã���������ö�άģ����������ƫ��e(t)��ƫ��仯�ʦ�e(t)��Ϊ���������룬���������Ϊu(t)��
ģ��������ͨ���������Ӷ����������г߶ȱ任��������ת����ģ���������ݱ��ض�������Ժ��˹��������ģ�����ƹ�����ģ�������ģ���������ģ��������ó�ģ������������ñ������ӽ��г߶ȱ任Ϊʵ�ʿ���������[1]����ģ�����ƹ���Կ���Ч��Ӱ��ϴ��⣬��������ģ�����������������Ӻͱ�������ͬ��Ҳ����Ҫ��һ�������������������Կ���ϵͳ����Ӱ���������[13]��
1) ��������KeӰ����ɣ���Keѡ�Ľϴ�ʱ������ϵͳ�����ٶȼӿ죬����ʱ���̣������ܲ��������Ӷ�ʹ��ϵͳ����ʱ��ӳ���Keѡ���С�ᵼ��ϵͳ�����ٶȼ���������ʹϵͳ����������ʱ��ʹϵͳ��ò��ȶ���
2) ��������KecӰ����ɣ�KecԽ��ϵͳ����ԽС�����ǻή��ϵͳ����Ӧ�ٶȡ�
3) ��������KuӰ����ɣ���������ֱ��Ӱ��������������Kuѡ��ԽС����̬���ڹ���Խ������ϵͳ������С����֮����̬��Ӧ�ٶ�Խ�죬��������������Ҳ��������ϵͳ��
��������Kuֱ��Ӱ����������������������Ke��KecӰ������ƫ���ƫ��仯�IJ�ͬ��Ȩ�̶ȣ��������ߵ�ȡֵ�仯�Կ������ܵ�����Ҳ���Ӱ��ġ���ˣ����������ܹ���ϵͳ�������ڹ�����ʵ�ֲ���������������Ӧ�������һ���̶������ģ���������Ŀ������ܡ�
2.2 ��̬����ģ���㷨���
�ڿ���ϵͳ�Ķ�̬���ڹ����У�һ��Ҫ���ڱ�֤ϵͳ�ȶ���ǰ�����ܹ���������ƫ������ϵͳ���ƹ����п������������ֲ��䣬����ϵͳ���ܵò�����������Ķ�̬���ܡ���̬����ģ���㷨����ʹ�ÿ����������ܹ���ϵͳ��Ӧ�IJ�ͬʱ��ʵ�������������ģ���������ܡ���������������Ӧ��IJ�ͬ�Σ�THϸ����TSϸ�����Ӳ�ͬ���ÿ���Ѹ�ٵ���Bϸ����Ũ�ȣ��Ӷ��������������ٺ��ȶ�������ԭ����ˣ����Խ����������ڻ��������ģ���������IJ�������Ӧ�������ɣ�����ǿģ�����Ƶ�����Ӧ������
2.2.1 Tϸ�����ڹ���
����ͼ1��ʾ���ڿ�ԭ������ʱBϸ�����ܵ�THϸ���Ļ���ã�Ҳ�ܵ�TSϸ�����������á����t���Ŀ�ԭŨ��Ϊ��(t)���ܿ�ԭ�̼���THϸ�������ΪTH(t)��TSϸ����Bϸ����Ӱ��ΪTS(t)����Bϸ����Ũ��S(t)Ϊ[6]��
S(t)=TH(t)-TS(t) (1)
����
TH(t)=?1��(t) (2)
TS(t)=?2{f[��S(t)]}S(t) (3)
ʽ�У�?1ΪTHϸ���Ĵٽ����ӣ�?2ΪTSϸ�����������ӣ���S(t)ΪBϸ��Ũ�ȱ仯��f(?)Ϊһ�����Ժ�������Bϸ��Ũ���йأ�����ϸ�����ƻ�̼�����������ʽ(3)�ɵ�Bϸ��Ũ���뿹ԭŨ�ȹ�ϵʽ���£�
S(t)=?1{1-��f[��S(t)]}��(t) (4)
���У���Ϊ�ٽ����������õı���ϵ������=?2/ ?1��
2.2.2 ģ�������������������㷨���
������ϵͳ��Ӧ����̵��ڻ�����������ģ������ϵͳ��ƫ��e(t)��Ӧ�ڿ�ԭŨ�Ȧ�(t)���ѿ�����������Ӧ��Bϸ��Ũ��S(t)���ѿ�������������Է���f(��u(t))��Ӧ�����������á��ο�ʽ(4)��ʾ����ϵͳ�������ڹ��ɣ����ģ������������Ku(t)��Ke(t)��Kec(t)���Ե����㷨���£�
Ku(t)=K1{1-�˦�f[��u(t)]}e(t) (5)
Ke(t)=K2{1-�˦�f[��u(t)]}e(t) (6)
Kec(t)=K3{1+�˦�f[��u(t)]}e(t) (7)
ʽ(5)~(7)�����ʽ(4)��ʾ��TSϸ�����ڹ��ɣ�������һ���������Ӧˡ���ȡֵ�ֱ�Ϊ[-1��0��1]����Ҫ���ݶ�Ӧϵͳ��Ӧ���趨��Ӧ�ˡ�K1��K2��K3�൱��THϸ���Ĵٽ�����ϵ����
��|e(t)|>e1ʱ��������Ӧ���ڽΡ�Ϊ�˿�������ƫ����=-1���Ӷ�ʹKu��Ke�ϴ�Kec��С�����ռӿ�ϵͳ�����ٶȣ���������ʱ�䡣
��e2<|e(t)|<>1ʱ��������Ӧ�к��ڽΡ�Ϊ�˱�������������=-1���Ӷ�ʹKu��Ke��С��Kec�������տ��Լ�Сϵͳ�ij�������
��|e(k)|<>2ʱ��������Ӧĩ�ڽΡ�Ϊ��ά��ϵͳ�ȶ��ԣ����=0����ʹ�����������ȶ���ijһ�ʺ�ֵ�����տ���ϵͳ���ٽ�����̬�Ρ�
��ʽ(5)~(7)�У�����K1��K2��K3���Կ���ϵͳ����Ӧ�ٶȣ�������Ӱ��ϵͳ��Ӧ���ȶ��ԡ�K1��K2��K3�ͦ�ȡֵ�IJ�ͬ��Ͽ��Բ�����ͬ�Ŀ���Ч�����������ѡ���������ڲ�������ʹ����ϵͳ��ý϶̵�����ʱ��ͽ�С�ij����������⣬�����Ժ���f(?)����������£�
 (8)
(8)
���У�bΪ�������仯��������ϵ������Ȼ������u(t)=0ʱ�������Ժ������Ϊ0����f(��u(t))=0��
�ö�̬����ģ����������ģ����������Ӻͱ������ӵĹ���Ϊ��������ƫ��ϴ�ʱ������Ku��Ke�ϴ��Լ�Kec��С��ʹ�ñ��ر������ٽӽ�Ŀ��ֵ�������ر����ӽ�Ŀ��ֵʱ������Ku��Ke��С�Լ�Kec���Ӷ����Ƴ�������������ƫ���Сʱ������Ku��Ke��Kec�ȶ���ijһֵ��ά��ϵͳ�ȶ������ö�̬����ģ��Ŀ����������������㷨���˷��˳���ģ��������������������Ӧ�ı��ȱ�ݣ�����˿������Ķ�̬���ܡ�
2.3 ��̬����ģ���㷨���
���ڳ���ģ������ϵͳ����̬��Ӧ�Σ�����ƫ��e(t)��ƫ��仯��e(t)����С����ʱ��ģ���Ӽ��ķֱ��ʽϵͣ�ʹ�ÿ��������Ƚ��Ͷ�Ӱ����ƾ��ȡ�Ϊ��������⣬������ϵͳ�Ŀ�ԭ��ʻ��������������̬����ģ���㷨�ԶԿ���ƫ����Ϣ(��Ӧ�ڿ�ԭ)������ʷŴ������Ի�ýϸߵĿ��ƾ��ȡ�
2.3.1 ����ƫ�����
Ϊ��ʵ������ģ����������ƫ����ʴ�������Ҫ���ݿ���ƫ��ľ���ֵ(��Ӧ��ԭ������)��������Դ���[15]���������ƫ�����������к�С�������ڣ�����������Ŀ���ƫ��(|e(t)|��1)����|e(t)|<��1(0�ܦ�1��0.05)��|e(t)|<��2(0�ܦ�2��0.01)ʱ����Ҫ������з����ԷŴ�����������ƫ�������״̬ʱ������ƫ���ԭ״̬����������������ƫ���ʷŴ����������Ŀ���������ǿ��������������ߡ���ƫ��ķ����Դ�����ʩ��ʽ(9)��(10)��ʾ��
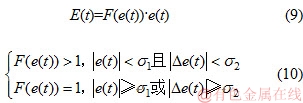
���У�F(e(t))Ϊ���ڿ���ƫ��e(t)�ķ����Ժ�����E(t)Ϊ��ʺ�Ŀ���ƫ��Ŵ������ƫ���1�ͦ�2�ֱ�Ϊƫ���ƫ��仯����ֵ����ʺ���F(e(t))������£�
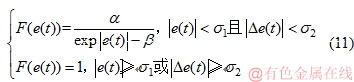
���У����ͦ�Ϊ��ͬ��������ƫ��Ϊ��ʱ�������ʱ�����/(1-��)��һ��ȡ1�ܦ���10��0<��<1����ƫ�������ʷŴ����������ݶ�̬����ģ���㷨����Ӧĩ�ڵ��㷨��������ģ���������������Ӷ����ģ������������̬���ȡ�
���ǵ�ʵ�ʿ��ƹ����У����������һЩ���������Ͳ��������һ�Կ���ϵͳ����Ӱ�졣Ϊ��ʹ�������ܸ��õ�ʶ����������ƫ������������Ŵ�����ľ���Ӱ�죬��Ҫ������������ʹ��������ӿ����Ŵ�����ʩ�Ա�֤���ƾ��Ȳ���Ӱ�졣
2.3.2 ������ʿ��������
Ϊ��ʵ����������ʹ����н��������źŵĸ���Ӱ�죬��Ҫ���������ʿ����Ŵ�ʩ������������ʹ����У����Կ�ԭ������ʶ��Էǿ�ԭ��������ʴ������Ӷ���߲�����ԭ���ʶ��Ч������Ѹ�������ܸû��������ڱ��Ŀ���������м��뿨�����˲������Կ���ƫ�ԭ�����˲���������߿�����������
�������˲�����һ����������״̬���Ź��Ʒ����������ź���������״̬�ռ�ģ���γ�һ��ʵʱ�����㷨����ΪԤ���У��2���֡�Ԥ���Ǹ���ϵͳ״̬���̽����Ե�ǰ״̬��������ƣ���ʱ��ǰ�ƽ���ǰ״̬���������Э�������ֵ��У�������ù۲ⷽ����Ԥ�������е��������ֵ����ǰ����ֵ�Ļ����Ͻ�����ǰ״̬�ĺ�����ơ���A��B��CΪϵͳģ�;��������˲�����ɢ����ѧģ������[16-18]��
 (12)
(12)
���У�x(t)Ϊtʱ�̵�ϵͳ״̬��u(t)Ϊkʱ�̶�ϵͳ�Ŀ�������y(t)Ϊtʱ�̵IJ���ֵ��W(t)��V(t)�ֱ�Ϊ���ƺͲ������������������㣺
 (13)
(13)
 (14)
(14)
�������˲����̾��岽�����¡�
1) Ԥ��tʱ��״̬���������ֵ��
 (15)
(15)
���У�x(t-1|t-1)Ϊ״̬������t-1ʱ�̹���ֵ��x(t|t-1)Ϊ״̬������tʱ�̵��������ֵ��
2) ����tʱ������Э����������ƾ���
 (16)
(16)
���У�P(t-1|t-1)Ϊt-1ʱ�����Э����Ĺ��ƾ���P(t|t-1)Ϊtʱ�����Э�����������ƾ���
3) ���tʱ�̵Ŀ������������
 (17)
(17)
���У�Kg(t)Ϊtʱ�̵Ŀ������������
4) У��tʱ��״̬�����������ֵ��
 (18)
(18)
���У�x(t|t)Ϊtʱ��״̬�����ĺ������ֵ��
5) У��tʱ�����Э���������ƾ���
 (19)
(19)
���У�P(t|t)Ϊtʱ�����Э����ĺ�����ƾ���
���������˲������������źţ�����Ϊϵͳ����ֵ����ֵ�����������趨ֵ�Ƚϲ���ƫ���ƫ��仯��ͬʱ��Ϊ������ƵIJ���������ģ���������������źš�
��Է����Զ����˲�ʵ��Ӧ�ã����빹�����ض����״̬ģ���Եõ�A��B��Cϵͳģ�;��Ӷ���ø���ʱ�̵�״̬Ԥ��ֵ����Է����Ա��ض����IJ��ö�����Ծ��Ӧ�����ʶ�������õ�ÿ���������һ�״��ͺ���ƹ���ģ��[19]��
 (20)
(20)
���У�K(t)Ϊ�Ŵ����棻T(t)Ϊʱ�䳣������(t)Ϊ�ͺ�ʱ�䡣������ģ��ת��Ϊ״̬�ռ�ģ�Ͳ���ɢ�������ɻ�ÿ������˲�����Ҫ��ϵͳģ��ʵʱ����A��B��C��
ͨ����̬����ģ���ϵͳ��̬�εĿ���ƫ�������ʷŴ�����ʹ������ģ����õ�ʶ�����ƫ���ǿģ���������������ȣ��Ӷ���߿���ϵͳ����̬���ȡ�ͬʱ����ģ����뿨�����˲������Խ�����ʹ����������źŵĸ��ţ���߿���ϵͳ�Ŀ�����������
2.4 ����ģ�����������������幤������
������ϵͳ���ֿ���ƫ��ʱ������ģ��������������Ϊ�����Ӧ�ٶȺͼ�С��������ͬʱ���ö�̬����ģ����ƵIJ���������������Ӧ��������ģ��IJ���Ke��Kec��Ku������ϵͳ��Ӧ������̬�κ�Ϊ��С��̬����߿��ƾ��ȣ�������̬����ģ��Կ���ƫ�������ʴ�������ʱ������ģ��IJ���Ke��Kec��Ku��Ȼʹ�ö�̬���ڽ���ƵIJ����������ɡ����⣬������ϵͳ���ڿ��������Ͳ��������������˲����������������������ĸ��ţ���֤����ϵͳ���ȶ����С�ͨ������ģ����������������ģ��ķֹ�Э������������ϵͳ���ջ����������Ŀ���Ч����
3 ϵͳ���漰�������
3.1 ���汻�ض���
Ϊ�˼�������ģ�����������ƵĿ���Ч����ѡ����ͼ3��ʾ�����ﷴӦ����Ϊ���ض��ù��ն���ΪĿǰӦ�ñȽϹ㷺������ƾ������̣����Ʒ�Ҵ�����Ϊ��������Դ���Ʒ[20]����ͼ3�У���sΪ����������Ũ�ȣ���pΪ�Ҵ�����Ũ�ȣ�FagΪ��ȴ��������TcΪ�¶ȿ���������mΪ�����¶ȣ���rΪ��Ӧ���¶ȣ���eΪ�����¶ȣ�FiΪ����������FeΪ������������agΪ�в�����ȴ�����¶ȣ� Ϊ����Һ̬�����ܽ�����Ũ�ȣ�
Ϊ����Һ̬�����ܽ�����Ũ�ȣ� ΪҺ̬����ƽ������Ũ�ȡ������ﷴӦ����1��ʱ�䳣���������湤����仯��ʵʱ�仯��ǿ�����Ի�ѧ��Ӧ���̣����ô�ͳ�����㷨�������Ի���������Ч����
ΪҺ̬����ƽ������Ũ�ȡ������ﷴӦ����1��ʱ�䳣���������湤����仯��ʵʱ�仯��ǿ�����Ի�ѧ��Ӧ���̣����ô�ͳ�����㷨�������Ի���������Ч����
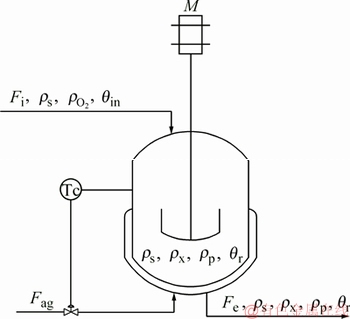
ͼ3 ���ﷴӦ����������
Fig. 3 Bioreactor process
�����ﷴӦ���Ļ���ģ������ʽ��ʾ[20]��
 (21)
(21)
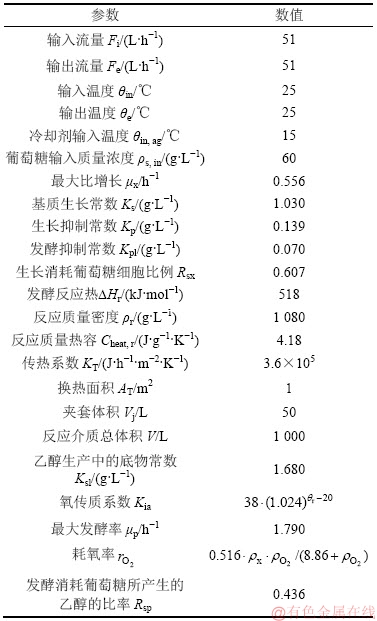
ʽ(21)ģ�������в������弰ȡֵ���1��ʾ��
��1 ���ﷴӦ��ģ�Ͳ���ֵ
Table 1 Value of bioreactor model parameter
3.2 ���ﷴӦ��ģ�ͱ�ʶ
���ڸ����ﷴӦ�����¶ȿ��ƶ����IJ����ڶ���¶ȹ������Ծ��Ӧ��ʶ����������ʱ��һ���ͺݺ���ģ�ͣ���ת���õ��������˲�����Ҫ��Ԥ��ģ�Ͳ��������ͨ��Matlab�е�������Ϲ��ߵõ������ﷴӦ���¶ȵ�ʱ��ģ������ʽ��ʾ��
 (22)
(22)
Ϊ�˲��Ա�ʶ�õ�ģ�͵Ķ�̬���ܺ�ģ�;��ȣ���ԭ����ģ�ͺͱ�ʶģ��ʩ����ͬ�Ľ�Ծ�����źţ�����ʵ��������ʶģ������ĶԱȣ���ñ�ʶ����ģ�͵ľ������Ϊ0.071 8��ʽ(22)��ʶģ���ܹ��Ϻõظ���ʽ(21)ԭ����ģ�����������ģ�;��ȵ�Ҫ��
3.3 ���߿��Ʋ�����Ӱ�����÷���
���ڱ������������ģ�������������������߲���K1��K2��K3�ͦ�ȡֵ�IJ�ͬ����Լ�ʽ(8)�з����Ժ���f(?)��b��ȡֵ�ȣ��Կ���Ч���������ͬ��Ӱ�졣��ˣ���ʵ��Ӧ�ø�����ģ��������ǰ����Ҫ������Щ���߲������������ԡ�
3.3.1 ���߲���K1��K2��K3�ͦǵ����÷���
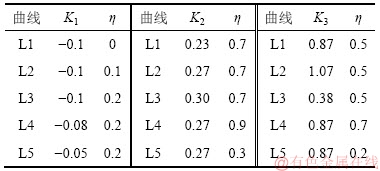
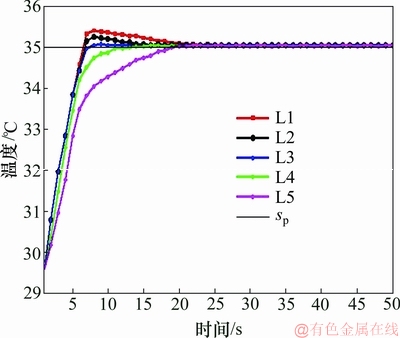
�����ﷴӦ�����¶���Ϊ���ƶ������¶��趨ֵ����Ϊ35 �档�ڱ�֤��������������һ�µ�ǰ���£��ֱ���Կ���������Ku��Ke��Kec����������ʽ(5)~(7)�е����߲���K1��K2��K3�ͦDz�ͬ���ֵ(���2��ʾ)���Կ������ܵ�Ӱ����з���ʵ�顣�������ʵ������ͼ4~6��ʾ�����и�ͼ��5������L1~L5�ֱ����K1��K2��K3�ͦ�ȡ��ֵͬʱ(���2��ʾ)�Ŀ���Ч����
1) ���ڱ�������Ku��ͼ4�е����߶ԱȽ���������ڿ�������������������һ�µ�ǰ���¦�Խ��ʱ������ϵͳ�ij�����ԽС����K1�ľ���ֵԽ��ʱ������ϵͳ��Ӧ�ٶ�Խ�졣
��2 ���߲����趨ֵ
Table 2 Setting value of immune parameters
ͼ4 ���߲���K1�ͦ�Ӱ�����öԱ�
Fig. 4 Comparison of immune parameters K1 & ��
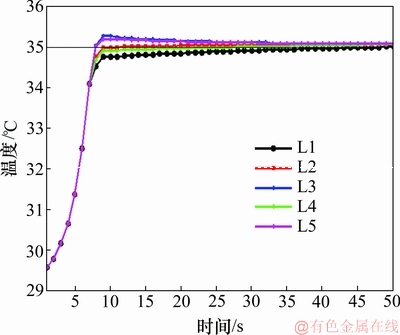
ͼ5 ���߲���K2�ͦ�Ӱ�����öԱ�
Fig. 5 Comparison of immune parameters K2 & ��
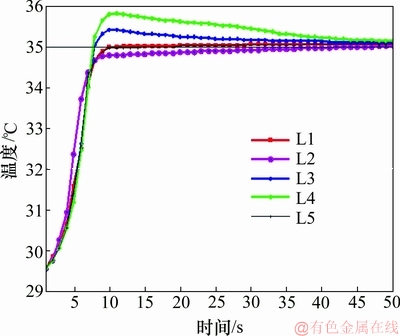
ͼ6 ���߲���K3�ͦ�Ӱ�����öԱ�
Fig. 6 Comparison of immune parameters K3 & ��
2) ������������Ke��ͼ5�е����߶ԱȽ���������ǽϴ�ʱ������ϵͳ�ij�������С��K2Խ��ʱ������ϵͳ��Ӧ�ٶ�Խ�죬����ʱ��Ҳ�������̡�
3) ������������Kec�������Ku��Ke��ϵͳ����Ч����Ӱ�죬Kec�����ù���������ͬ����ͼ6���Եó�������ԽСʱ��ϵͳ�ij�����ԽС��K3Խ��ϵͳ����Ӧ�ٶȷ���Խ��������ʱ��Ҳ��˱��
��ˣ������������߲����仯Ӱ����ɣ��ɺ������ڸ���ز�������߿���Ч����
3.3.2 ���߲���b�����÷���
ͼ7��ʾΪ�����Ժ��� �ı仯���ơ���ʽ(8)�з����Ժ�����b�IJ�ͬȡֵʱ������Ӧ�ķ����Ա仯������ͼ8��ʾ����ͼ8��֪������bȡֵ��ͬ�Ժ�������Ӱ��ϴ������Ժ�������ʽ�еIJ���bȡֵ��ͬʱ���ı仯����Ҳ�ᷢ���ı�(��ͼ7��ʾ)������Ӱ�����ϵͳ�ij�������
�ı仯���ơ���ʽ(8)�з����Ժ�����b�IJ�ͬȡֵʱ������Ӧ�ķ����Ա仯������ͼ8��ʾ����ͼ8��֪������bȡֵ��ͬ�Ժ�������Ӱ��ϴ������Ժ�������ʽ�еIJ���bȡֵ��ͬʱ���ı仯����Ҳ�ᷢ���ı�(��ͼ7��ʾ)������Ӱ�����ϵͳ�ij�������
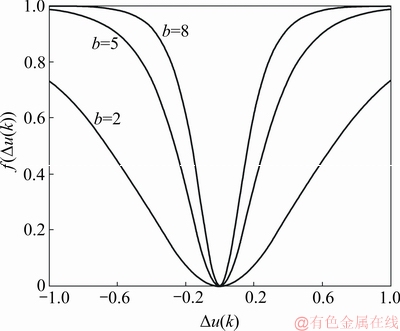
ͼ7 �����Ժ��� �ı仯����
�ı仯����
Fig. 7 Change trend of nonlinear function 
��������ϸ�����ƻ�̼���������b��һ���̶���Ӱ����ƹ������������á�����b��������������ǿ��ϵͳ��������С����bΪ2��5��8ʱ������Ӧ�Ŀ���Ч���Ա���ͼ8��ʾ��
3.4 ����������
��Ը����ﷴӦ���������¶ȿ��ƶ��ֱ��������ģ������������������������ģ���������ʹ�ͳPID���п��ƣ����Ա����Ӧ����Ч�����������㷨�Ŀ����������������¡�
1) ��ͳPID�����������ֱ�����Ϊ��KP=0.12��Ki=0.01��Kd=-0.20��
2) ����ģ���������IJ���Ϊ����������Ke=2.45��Kec=0.01����������Ku=-0.16��
3) ����������ģ���������IJ�������Ϊ����̬���ڵ�Ԫ����ΪK1=0.3����=0.2��b=5��K2=0.25��K3=0.01����̬���ڵ�Ԫ����Ϊ��1=0.3����2=0.1����=3.5����=0.5��K1=0.2��K2=0.25��K3=0.01����=0.5��
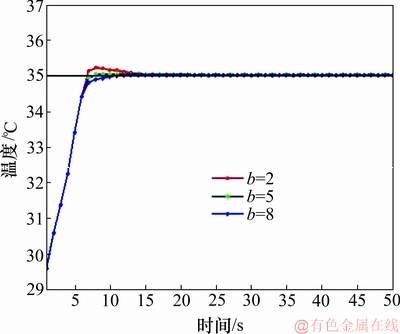
ͼ8 ���߲���bӰ�����öԱ�
Fig. 8 Comparison of influence of immune parameters b
���Ʒ���ʵ��������źʹ�����������2���֡�
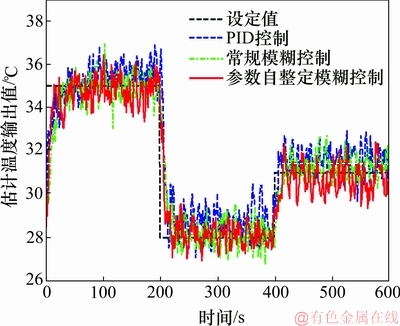
1) ���ſ���Ч�����ڸ÷���ʵ�����ʱ������ϵͳ���趨ֵ����35 ��仯��32 �棬�ٱ仯��28 �棬���Ϊ30 �档�����Ч����ͼ9��ͼ10��ʾ��
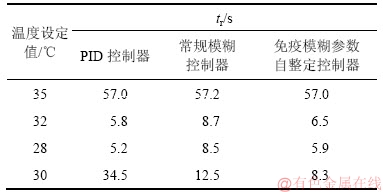
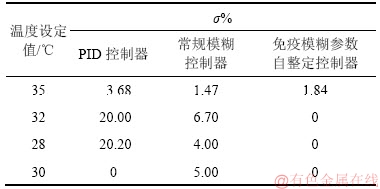
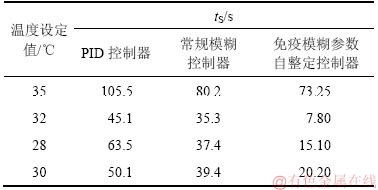
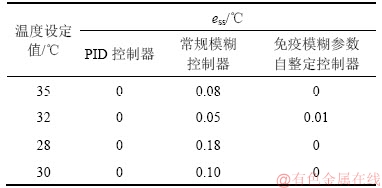
��������£�3�ֿ���������ʱ��tr�Ա����3��ʾ����������ָ�곬������%�Ա����4��ʾ����������ָ�����ʱ��ts�Ա����5��ʾ����������ָ����̬���ess�Ա����6��ʾ���ӱ�3~6���Կ���������ڳ���ģ��������������ģ��������������������PID������������ʱ��϶̣���̬����С�����ǣ�PID�������ij������͵���ʱ��ȳ���ģ��������������ģ�������������������Ĵ�����ģ�������������������ĵ���ʱ����̡�
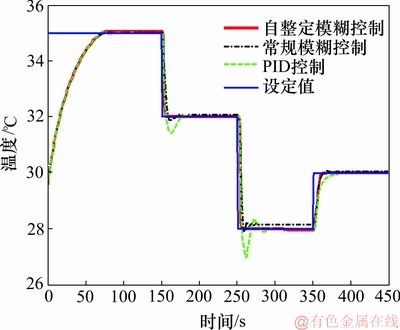
ͼ9 ��Ӧ���¶ȿ���Ч���Ա�
Fig. 9 Comparison of control effect for reactor temperature
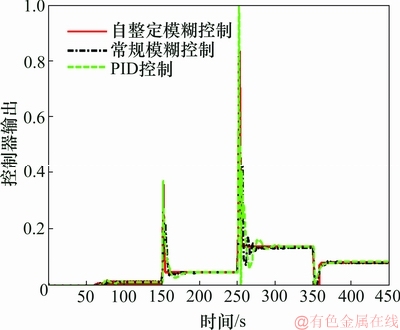
ͼ10 ��������Ա�
Fig. 10 Comparison of control outputs
��3 ��������ʱ��tr�Ա�
Table 3 Comparison of control arise time tr
��4 ���Ƴ�������%�Ա�
Table 4 Comparison of control overshoot ��%
��5 ���Ƶ���ʱ��tS�Ա�
Table 5 Comparison of control adjustment time tS
��6 ������̬���ess�Ա�
Table 6 Comparison of control steady-state error
��ͼ9��10���Կ���������ڴ�ͳ��PID�����㷨������ģ�������������������ܹ��ڸ��ֹ����²�������������Ѹ�ٱƽ�����Ŀ���¶ȣ������Ӧ�Ŀ�������ʱ�䡢����ʱ��ͳ������ȶ�̬����ָ�����Աȳ����ģ�����������ţ�����������ģ���������˷��˳���ģ�����������ڵ���̬���Ȳ��ߵ�ȱ�ݣ�ȡ���˽Ϻõ���̬���ܣ�����ĸ���������ָ��Ա����3~6��ʾ����ˣ��������ߵ��ڵIJ���������ģ�������㷨�Ŀ����������ڴ�ͳPID�㷨�ͳ���ģ�������㷨�Ŀ������ܡ�
2) �����ſ���Ч����Ϊ�˼�������ģ�������������������Ŀ����ſ�����������ʽ(22)��ʶģ�ͽ�����ɢ����������Ӧ���¶Ȧ�r��Ϊ�������˲���״̬�����������ڷ�Ӧ������ģ�͵Ĺ������ֵ�ϵ���������Ϊ״̬��ʵ�ʲ���ֵ�����¶ȷ�Ӧ����Ԥ��ģ�͵õ�����ϵͳ��Ԥ�����ֵ������ʵ���зֱ���������3�ֿ����㷨���Ƹ����ﷴӦ���¶ȶ����¶��趨ֵ����35 ��仯��28 ���ٵ�31 �棬������Q=0.4��R=0.5�ĸ�˹��������ģ��ϵͳ���������ڳ�ʼЭ��������ȡֵ���˲�Ч����Ӱ���С��ֻҪ����ֵ��Ϊ������ܺܿ�������ijһ��ֵ[21]����Э�������ij�ʼֵP0����Ϊ10���������ԱȽ����ͼ11��12��ʾ��
��ͼ11���Կ��������ڵ���������Ŀ���ϵͳ������ģ�������������������������˲���������֮ǰ�����ܹ���һ���̶��ϼ���������Ӱ�졣��ͼ12�ɿ����������˲���������ģ�������������������Ŀ���Ч��Ҫ������2�ֿ����㷨���š����IJ��þ�������������˲�Ч��[21]������ģ�������������������ľ������Ϊ0.284 7������ģ���������ľ������Ϊ0.319 8��PID��������MSEΪ0.387 2����ˣ�����ڳ���ģ���������ʹ�ͳPID��������Ƶ�����ģ���������������������н�ǿ�Ŀ�����������
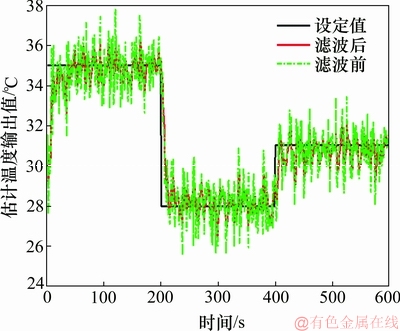
ͼ11 ����������ģ���������˲�Ч���Ա�
Fig. 11 Comparison of filtering effects of parameter self-tuning fuzzy controller
ͼ12 ����Ч���Ա�
Fig. 12 Comparison of control effect
4 ����
1) �������о�ģ��������������ģ����������ȱ��Ļ����ϣ�������������ϵͳ�ķ������ڻ��ƺ��������ԭ���������һ������ģ��������������������
2) ͨ������������������Ӧ�仯ʹ����ģ�������������������ܹ����ٶ����ȶ�����������ϵͳƫ���Ŀ�ġ����⣬����Ŀ�ԭ��ʻ��������̬����ģ�����ʷŴ����úͿ����Ŵ�ʩ���ԽϺõؿ˷�����ģ����������̬���Ȳ��ߵ�ȱ�ݡ�
3) ���ÿ�����Ӧ�������ﷴӦ�����¶ȿ��ƶ�����ʵ��������������������ģ��������������������������߿���ϵͳ�Ķ�̬���ܺ���̬���ȣ���������˿���ϵͳ�Ŀ��������ܡ�
4) ������Ҫ��һ���о���������ϵͳ���۸��ӵ��ڻ������ƣ��Ա���Ƹ�����ģ�����߿������Ŀ��Ʋ������ڷ�������һ�������������ܺͿ�����������
�ο����ף�
[1] ������, ��־��, ������. ���ܿ��������뼼��[M]. ����: �廪��ѧ������, 2011: 4-14.
SUN Zengqi, DENG Zhidong, ZHANG Zaixing. Theory and technology of intelligent control[M]. Beijing: Press of Tsinghua University, 2011: 4-14.
[2] ������, ʷˮ��. �Ŵ��㷨�Ż�ģ�������������ķ����о�[J]. ������ƹ���, 2011, 19(12): 79-81.
GUO Rongyan, SHI Shuie. A study on optimization of fuzzy controller parameters based on genetic algorithm[J]. Eletronic Design Engineering, 2011, 19(12): 79-81.
[3] CHOU C H. Genetic algorithm-based optimal fuzzy controller design in the linguistic space[J]. IEEE Transactions on Fuzzy Systems, 2006, 14(3): 372-385.
[4] �½���, ��ΰ��. ��Ⱥ�㷨�Ż�ģ������[J]. �����������Ӧ��, 2007, 43(5): 113-115.
CHEN Jianliang, ZHU Weixin. Ant colony algorithms for fuzzy rules optimization[J]. Computer Engineering and Application, 2007, 43(5): 113-115.
[5] ������, �����. ��ֵ�㷨��ģ�������е�Ӧ��������о�[J]. ���������, 2006, 23(4): 151-153.
WANG Yanling, ZHU Congqiao. Application and simulation of interpolation method in fuzzy control[J]. Computer Simulation, 2006, 23(4): 151-153.
[6] ������, ������. һ����ӱ��ģ���Ե������߷�������ϵͳ[J]. ���������, 2000, 15(4): 443-446.
DING Yongsheng, REN Lihong. A new fuzzy self-tuning immune feedback control system[J]. Control and Decision, 2000, 15(4): 443-446.
[7] ��Զ��, ��ʿ��. ��������ԭ��������Ӧģ���������Ż����[J]. ��������ѧ��, 2003, 7(4): 335-338.
LI Yuangui, LI Shiyong. Optimal design of adaptive fuzzy controller based on immune principle [J]. Electric Machines and Control, 2003, 7(4): 335-338.
[8] ̸Ӣ��, ��, ������. ����PID�����������¿���ϵͳ�е�Ӧ���о�[J]. �й��������ѧ��, 2002, 22(10): 148-152.
TAN Yingzi, SHENG Jiong, L? Zhenzhong. Study of immune PID controller for superheated steam temperature control system[J]. Proceedings of the Chinese Society for Electrical Engineering, 2002, 22(10): 148-152.
[9] ̷����, ���Ĺ�, ��Զ, ��. ��������ģ��PID��EPS���Ʒ����о�[J]. ���������, 2014, 31(9): 170-173.
TANG Guangxing, JIAN Wenguo, GAO Yuan, et al. On simulation of EPS control based on immune fuzzy PID[J]. Computer Simulation, 2006, 2014, 31(9): 170-173.
[10] �緲��, ��˻�, �ο���. ���ڹ�������Ѱ����תλϵͳ��ģ����������ӦPID����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2013, 44(����): 37-41.
ZHEN Fanfan, LI Denghua, DUAN Keke. Adaptive fuzzy-immune PID control based on position transformation system of FOG north seeker[J]. Journal of Central South University (Science and Technology), 2013, 44(Suppl): 37-41.
[11] DAI Aini, ZHOU Xiaoguang, LIU Xiangdong. Design and simulation of a genetically optimized fuzzy immune PID controller for a novel grain dryer[J]. IEEE Access, 2017, 5: 14981-14990.
[12] ������, ����, ����. ��������Ⱥ�Ż���DZ���������Ӧģ������[J]. ���ƹ���, 2017, 24(2): 441-445.
PENG Pengfei, JIANG Jun, HUANG Liang. The adaptive fuzzy control method for steady depth of underwater vehicle based on particles swarm optimization[J]. Control Engineering of China, 2017, 24(2): 441-445.
[13] ������, ������. �����Ե���ģ������ϵͳ����������[J]. ϵͳ����ѧ��, 2006, 18(Z2): 628-629.
LIANG Tiecheng, JIANG Changhong. Design and simulation of parameter self-adjusting fuzzy control system[J]. Journal of System Simulation, 2006, 18(Z2): 628-629.
[14] ����, �����, ������ķ����ĸ߿յ��Ч��ģ������Ӧ�Ż�����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2014, 45(3): 742-747.
LEI Jinli, DOU Manfeng. Fuzzy adaptive optimization control of high-altitude motor efficiency based on loss analysis[J]. Journal of Central South University (Science and Technology), 2014, 45(3): 742-747.
[15] ����, ������, ������. ����NEI���ڻ��Ƶķ����������Ż�������[J]. ���������, 2008, 23(10): 1159-1162.
LIU Bao, DING Yongsheng, WANG Junhong. Nonlinear optimized intelligent controller based on modulation of NEI system[J]. Control and Decision, 2008, 23(10): 1159-1162.
[16] ��Сƽ, ����. �������˲�ԭ����Ӧ��[M]. ����: ���ӹ�ҵ������, 2015: 143-174.
HUANG Xiaoping, WANG Yan. The principle and application of Kalman filter [M]. Beijing: Press of Electronic Industry, 2015: 143-174.
[17] TALEBI S P, WERNER S. Distributed Kalman filtering in presence of unknown outer network actuations[J]. IEEE Control Systems Letters, 2019, 3(1): 186-191.
[18] ����, ����ƽ, Ԭ����,��. �������˲�������ٿ���[J]. ����������Ӧ��, 2007, 24(6): 977-980.
GAO Xiangdong, CHEN Yongping, YUAN Ruona, et al. Seam tracking control using a Kalman filter[J]. Control Theory and Application, 2007, 24(6): 977-980.
[19] LIU Bao, DING Yongsheng, GAO Na, et al. A bio-system inspired nonlinear intelligent controller with application to bio-reactor system[J]. Neurocomputing, 2015, 168(C): 1065-1075.
[20] NAGY Z K. Model based control of a yeast fermentation bioreactor using optimally designed artificial neural networks[J]. Chemical Engineering Journal, 2007, 127(1): 95-109.
[21] ��ѧ��, �콨��, ����. �������˲�������������Ӧ�÷����о�[J]. �����Ӧ��������, 2012, 29(6): 212-215.
WANG Xuebin, XU Jianhong, ZHANG Zhang. On analysis and application approach for Kalman filter parameters[J]. Computer Applications and Software, 2012, 29(6): 212-215.
(�༭ ����ƽ)
�ո����ڣ�2018-07-29�������ڣ�2018-10-22
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(60534020, 60775052); ɽ��ʡ�����������ѧ�ҿ��н�������������Ŀ(BS2010DX038) (Projects(60534020, 60775052) supported by the National Natural Science Foundation of China; Project(BS2010DX038) supported by the Excellent Youth and Middle Age Scientists Fund of Shandong Province)
ͨ�����ߣ����������ڣ��������������ܼ��Ϳ��Ƽ����о���E-mail��liubao@upc.edu.cn
ժҪ��Ϊ��һ���������ģ�������㷨���ڵĿ����������������ߵ�������̬���Ƚϵ͵����⣬���һ�ֻ�������ϵͳ���ڻ��ƵIJ���������ģ�������㷨�����㷨�ڶ�̬���ڽν����������ϵͳ����Tϸ���������ڻ����������������������Ի�ý��ŵĿ���ϵͳ��̬���ܣ���̬���ڽ���������ϵͳ��ԭ���ԭ����������ƫ����Ϊ��ԭ�����з����Դ�����ͬʱ�����������������ģ���������������ȣ��Ӷ��˷�����ģ����������̬���Ȳ��ߵ�ȱ�ݡ�Ϊ��������ģ�������������㷨�Ŀ���Ч�������Ľ�����㷨Ӧ�������ﷴӦ���ķ������¶ȿ��ƶ����о��������������ڳ���ģ�������㷨��PID�㷨������ģ�������������㷨���нϺõĿ���Ч���ͽ�ǿ�Ŀ�����������
[1] ������, ��־��, ������. ���ܿ��������뼼��[M]. ����: �廪��ѧ������, 2011: 4-14.
[2] ������, ʷˮ��. �Ŵ��㷨�Ż�ģ�������������ķ����о�[J]. ������ƹ���, 2011, 19(12): 79-81.
[4] �½���, ��ΰ��. ��Ⱥ�㷨�Ż�ģ������[J]. �����������Ӧ��, 2007, 43(5): 113-115.
[5] ������, �����. ��ֵ�㷨��ģ�������е�Ӧ��������о�[J]. ���������, 2006, 23(4): 151-153.
[6] ������, ������. һ����ӱ��ģ���Ե������߷�������ϵͳ[J]. ���������, 2000, 15(4): 443-446.
[7] ��Զ��, ��ʿ��. ��������ԭ��������Ӧģ���������Ż����[J]. ��������ѧ��, 2003, 7(4): 335-338.
[8] ̸Ӣ��, ��, ������. ����PID�����������¿���ϵͳ�е�Ӧ���о�[J]. �й��������ѧ��, 2002, 22(10): 148-152.
[9] ̷����, ���Ĺ�, ��Զ, ��. ��������ģ��PID��EPS���Ʒ����о�[J]. ���������, 2014, 31(9): 170-173.
[12] ������, ����, ����. ��������Ⱥ�Ż���DZ���������Ӧģ������[J]. ���ƹ���, 2017, 24(2): 441-445.
[13] ������, ������. �����Ե���ģ������ϵͳ����������[J]. ϵͳ����ѧ��, 2006, 18(Z2): 628-629.
[14] ����, �����, ������ķ����ĸ߿յ��Ч��ģ������Ӧ�Ż�����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2014, 45(3): 742-747.
[15] ����, ������, ������. ����NEI���ڻ��Ƶķ����������Ż�������[J]. ���������, 2008, 23(10): 1159-1162.
[16] ��Сƽ, ����. �������˲�ԭ����Ӧ��[M]. ����: ���ӹ�ҵ������, 2015: 143-174.
[18] ����, ����ƽ, Ԭ����,��. �������˲�������ٿ���[J]. ����������Ӧ��, 2007, 24(6): 977-980.
[21] ��ѧ��, �콨��, ����. �������˲�������������Ӧ�÷����о�[J]. �����Ӧ��������, 2012, 29(6): 212-215.
