
DOI: 10.11817/j.issn.1672-7207.2017.05.012
����������ϵͳ�նȶ�̬�������ٿ���
������1��������1��������1������2������3
(1. ���մ�ѧ �����뽻ͨ����ѧԺ������ ��212013��
2. ���ϴ�ѧ ���繤��ѧԺ������ ���ڣ�570228��
3. ���մ�ѧ ���������о�Ժ������ ��212013)
ժ Ҫ��
����ʻƽ˳�ԣ���Ͽɱ�նȰ���������ϵͳ���ص㣬�����̬�������ٿ����㷨����Ӧ���ڿɱ�նȰ���������ϵͳ������Matlab/Simulink���������ɶ���������ģ�͡�ѡȡ�����������ٶȡ����ܶ��г̺���̥���غɵľ�����Ϊƽ˳������ָ�꣬ͨ����η�����ȷ��������ָ���Ȩ��ϵ���������Ŵ��㷨ȷ�����������������Ÿնȡ����ö�̬���������㷨�������ܸնȣ��������øն������ŸնȵIJ���ȷ�������㷨������ϵ�����ڵ�������ʹ����Ʋ�����Ѱ�����ò����Ǻϣ��������������µĿ���Ч��������֤������������������Ŀ����㷨�ڻ�Ϲ���������Ч��ʹ�����������ٶȾ�������С6.34%�����ܶ��г̾�������С7.35%���Ӷ���߳�����ʻ��ƽ˳�ԡ�
�ؼ��ʣ�
�������������նȿɿ�����̬�����������Ŵ��㷨��ƽ˳����
��ͼ����ţ�TP272��U463.33+4.2 ���ױ�־�룺A ���±�ţ�1672-7207(2017)05-1204-07
Dynamic and trackable interation controls on stiffness of semi-active suspension system
LI Zhongxing1, LI Chongchong1, LIU Yawei1, LI Mei2, XU Xing3
(1. School of Automotive and Traffic Engineering, Jiangsu University, Zhenjiang 212013, China;
2. Mechanical and Electrical Engineering College, Hainan University, Haikou 570228, China;
3. Automotive Engineering Research Institute, Jiangsu University, Zhenjiang 212013, China)
Abstract: In order to improve the ride comfort of vehicles, a new control method named dynamic and trackable iteration control, which combined the advantages of semi-active suspension system, was proposed to control stiffness for semi-active suspension system. The 7POF simulation model of the vehicle was established by Matlab/Simulink. The root-mean-square values of body acceleration, dynamic suspension travel and tire load were chosen as evaluation indexes, and weight coefficients of the indexes were obtained by analytic hierarchy process method, and genetic algorithm was applied to get the optimal suspension stiffness in the typical condition. By using the dynamic and trackable iteration to control stiffness, and then according to the difference between the stiffness of computational and optimal, the correction coefficient of control algorithm was determined. Under typical conditions, parameters of control and optimization were identical, and control effects were verified under other conditions. The simulation results show that body acceleration and dynamic suspension travel decrease by 6.34% and 7.35% respectively under mixed conditions, and the ride comfort of vehicles is improved by the proposed control method.
Key words: semi-active suspension; controllable stiffness; dynamic and trackable interation; genetic algorithm; ride comfort
������ʻƽ˳��������ȶ�����һ��ì�ܣ���ͳ�������ܵ����ܲ���ȷ�������ܶ���ѧ����Ҳ��֮ȷ��[1]��Ȼ���ڲ�ͬ����ʻ�����£����Ƕ���ʻƽ˳��������ȶ��Ե�Ҫ��������ͬ��Ϊ���������Զ��ֹ�������Ӧ�����������˸նȿɵ��İ��������ܣ����ѻ�ù㷺Ӧ��[2]���ɱ�նȵİ���������ϵͳ�ܹ�����·��״���������غɵı仯�������ܸնȣ����е�Ƶ������·������ŵ㣬�ڶ��ֹ����¾�����߳�������������[3]���Կɱ�նȰ���������ϵͳʵʩ���ƣ�������ʻ�����������ܸնȻ����ᣬ�������Ե�·���غɵȷ������Ӧ�������Ӷ����Ƴ�����ʻƽ˳�ԡ����������ܿ��������dz��������������Ҫ�о��ȵ�[4-5]�����γ�PID���ơ�ģ�����ơ�³�����Ƶȳ���Ŀ�������[6-8]����Щ�������۾���һ���̶������������ܵ����ܡ������������һ���ɵ����㷨�ݱ�����Ķ�̬�������ٿ����㷨���ÿ����㷨���ݻ�������ʵʱ�����(�ⲿ����)���ó���ͬ�ĸնȵ���������ٵ�������ϵͳ�ն�Ϊ������������������ٻ���������������һ�θնȵ�����ֱ��������������ȶ����ÿ����㷨��ɢ����������������Ч�����ص㣬����Ϊ���������ܿ����ṩһ����˼·��
1 ����ϵͳģ��
1.1 �նȿɱ����ܳ�������ѧģ��
�ڸնȿɱ䵯��ϵͳ��ѧģ�͵Ļ����Ͻ���7���ɶ�������������������ģ�ͣ�ij�����Ϳͳ���ز������1��ʾ��7�����ɶȷֱ�Ϊ�����������Ĵ��Ĵ���λ�ơ��������㡢����������4���ǻ���������ֱλ�ơ�
��1 ������ز���
Table 1 Parameters of vehicle
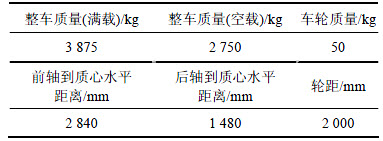
��4�������������������λ�ô��Ĵ�ֱλ��Ϊ��ZfL0��ZfR0��ZrL0��ZrR0������
 (1)
(1)
ʽ�У�ZcbΪ�����������Ĵ���ֱλ�ƣ���Ϊ���������IJ���ǣ���Ϊ���������ĸ����ǣ�lf��lr�ֱ�Ϊǰ��������������ĺ����ߵ�ˮƽ���룻dΪ�־ࡣ
4�����ܵ�������Ϊ
 (2)
(2)
ʽ�У�FfL��FrL��FfR��FrRΪ4�����ܺͻ����������Ӵ�����������kf��kr�ֱ�Ϊǰ�����ܵĸնȣ�Cf��Cr�ֱ�Ϊǰ�����ܼ���������ϵ����ZfL��ZrL��ZfR��ZrR�ֱ�Ϊ��ǰ�֡���ǰ�֡�����֡��Һ��ֵĴ�ֱλ�ơ�����ţ�ٵڶ����ɽ���7���ɶ�������������������ģ�ͣ�
 (3)
(3)
ʽ�У�qfL��qrL��qfL��qrR�ֱ�Ϊ��ǰ�֡���ǰ�֡�����ֺ��Һ����ܵ���·�洹ֱλ�Ƽ�����mwf��mwr�ֱ�Ϊǰ����̥������mcbΪ����������JxΪ�����������������������ߵ�ת��������JyΪ���������������ĺ������ߵ�ת��������
2 ϵͳ���Ʋ����Ż�
2.1 ȷ��Ŀ�꺯��
���dz�����ʻƽ˳�ԣ�ѡȡ�������������� (fACC)����̥���غɾ�����(fDTL)�����ܶ��г̾����� (fSWS)Ϊ�Ż�Ŀ�����[9]��ѡ�����Լ�Ȩ�ͷ�������Ŀ���Ż�����f(x)���ڸ�����Ӧ�ļ�Ȩϵ����ͳһ��Ŀ�����ٺ����������Ż�Ŀ�꺯��Ϊ

 (4)
(4)
ʽ�У���1Ϊ�����������ٶȾ������ļ�Ȩϵ������2 Ϊ���ܶ��г̾������ļ�Ȩϵ������3Ϊ��̥���غɾ������ļ�Ȩϵ����min(fACC)Ϊ�����������ٶȾ������ڸնȿɱ䷶Χ�ڵ���Сֵ��min(fSWS)Ϊ���ܶ��г̾������ڸնȿɱ䷶Χ�ڵ���Сֵ��min(fDTL)Ϊ��̥���غɾ������ڸնȿɱ䷶Χ�ڵ���Сֵ��
2.2 ����Լ������
����ϵͳ�նȺ�����Ȳ����Ż����ʱ��Ϊ��֤ϵͳ���ܵ�ʵ�֡�ʵ�����밲ȫ�Եȣ������Ż������������Լ��������
1) ��̥���غɾ�����ֱ��Ӱ�쳵���IJٿ��ȶ��Ժ���ʻ��ȫ�ԣ�����̥���غ�����������֮��(������Զ��غ�)����lʱ����������渽����Ϊ0���Ӷ�ʧȥ���������ƶ�������˳�����·������Զ��غ�Ӧ�������ں�����Χ�ڡ���������Զ��غɾ�����С��1/3ʱ�������������ĸ���С��0.15%���ɽ�����Ϊ�����������[10]��
2) �����ܶ��г̵ľ���������λ�г�֮��С��1/3ʱ������ϵͳײ����λ��ĸ���С��0.15%������Ϊײ�����ᷢ��[10]��
2.3 ȷ����Ȩϵ��
��η�����(analytic hierarchy process)��һ�ֶ�Ŀ����߷���[11-13]���÷���ͨ���Ƚϸ�ָ��֮�����Ҫ��ȷ��������ָ��ļ�Ȩϵ����
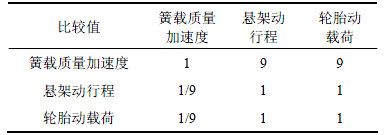
eij����ָ��i��ָ��j��Ҫ�ԵıȽ�ֵ���÷����涨ͬ����ҪΪ1������ҪΪ9�����ݸ�����ָ��֮����Ҫ�ԵıȽϿɹ������2��ʾ���жϾ���
��2 �жϾ���
Table 2 Judgment matrix
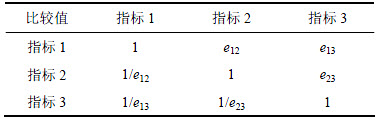
����ѡȡ�����������ٶȾ����������ܶ��г̾���������̥���غɾ�����Ϊ������ʻƽ˳�Ե�����ָ�ꡣ�����������ٶȾ������dz���ƽ˳�Ե���Ҫ����ָ�꣬������������2��ָ�꣬�����������ٶȾ��������и��ߵ���Ҫ�ԣ������ܶ��г̾���������̥���غɾ�����������ͬ����Ҫ�ԡ������������õ����ĸ�����ָ����жϾ������3��ʾ��
��3 ����ָ���жϾ���
Table 3 Judgment matrix of evaluation indexes
�����жϾ��������������������ָ��ļ�Ȩϵ����
1) �����жϾ�����Ԫ�صij�������
 (5)
(5)
�����Xm=[81, 1/9, 1/9]T��
2) ���������X��3�������Hm��
 (6)
(6)
�����Hm=[4.327, 0.4807, 0.4807]TT��
3) ��������Hm�����������£�
 (7)
(7)
����æ�=[0.8,0.1,0.1]�������¼�Ϊ������ָ���Ӧ�ļ�Ȩϵ�����������������ٶȾ������ļ�Ȩϵ����1Ϊ0.8�����ܶ��г̾������ļ�Ȩϵ����2Ϊ0.1����̥���غɾ������ļ�Ȩϵ����3Ϊ0.1��
4) �����жϾ���һ���Ա��ʣ�
 (8)
(8)
ʽ�У���n=3ʱ���������RI=0.58���ʾ�����ó�CR=-2.05��0.1��һ���Լ���ͨ����
2.4 �����Ŵ��㷨�Ŀ��Ʋ����Ż�
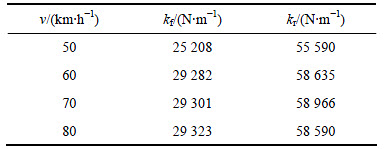
���ڵ�1�ڽ�����7���ɶȿɱ�նȰ���������ϵͳSimulink����ģ�ͣ���ʽ(4)Ϊ�Ż�Ŀ�꺯������MATLAB�б�д�Ŵ��㷨�Ż����������Ŵ��㷨�Ż�������Ʋ�����ѡȡΪ��Ⱥ���ģΪ100���������Ϊ0.065���������Ϊ0.73���㷨��ֹ�����ǽ�������Ϊ300��ǰ���ն�(kf)ȡֵ��ΧΪ10~50 kN/m�������ն�(kr)ȡֵ��ΧΪ20~100 kN/m���ڵ�������(·��״��ѡȡA��B��C��·�棻����ѡȡ80~110 km/h(A��·��)��50~80 km/h(B��·��)��30~60 km/h(C��·��)�����Ϊ10 km/h���غ�ѡȡ���ؼ�����)��ǰ��ɱ���������ܸն�(kf��kr)����Ѱ�š���4�ͱ�5��ʾ�ֱ�Ϊ���ؼ�����ʱ��A��·���ǰ��ɱ�նȰ��������ܸն�(kf��kr)�Ż������
��4 A��·�������Ż����
Table 4 Optimization results of class A full-load
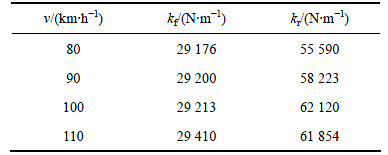
��5 A��·������Ż����
Table 5 Optimization results of class A road-load
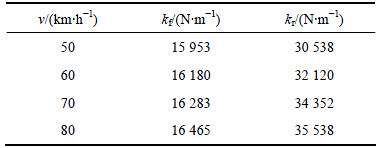
��6�ͱ�7��ʾ�ֱ�Ϊ���ؿ���ʱ��B��·��ɱ�նȰ��������ܸն�(kf��kr)�Ż������
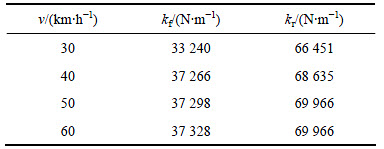
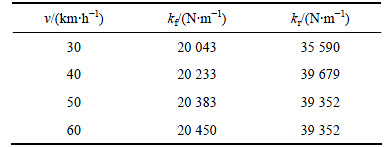
��8�ͱ�9��ʾ�ֱ�Ϊ���ؼ�����ʱ��C��·��ɱ�նȰ��������ܸն�(kf��kr)�Ż������
���ݱ�4~9���Ż�������Կ���������ͬ��·��ȼ����غ������£�ǰ�����ܵĸն������ٶȵ����Ӷ������ӵ����ƣ���������������ͬ��·��ȼ��ͳ����£������Ż�����ǰ�����ܸնȱȿ��صĴ�
��6 B��·�������Ż����
Table 6 Optimization results of class B full load
��7 B��·������Ż����
Table 7 Optimization results of class B road-load
��8 C��·�������Ż����
Table 8 Optimization results of class C full-load
��9 C��·������Ż����
Table 9 Optimization results of class C road-load
3 ���ڶ�̬���������㷨��ϵͳ����
�ڴ�ͳ�������ƵĻ����������̬�������ٿ��ƣ�������Ӧ���ڿɱ�նȰ���������ϵͳ�Ŀ��ơ����ֿ��Ʒ���ʵʱ���������������źţ������ź����뵽�������ĵ���ʽ�У���������ɵĸնȣ�ִ���������ɵĸն��л�������ֵ��������������������������ظ���������ֱ��������ĸն������ȶ�(����)�����ֿ��Ʒ�����̬�������������������ʵʱ�ı䵯�ɸնȣ����ƽ����Ƶ�����ֵ���Ӷ���߳������������ԡ�
3.1 ȷ����ʼ����ʽ
�Գ���ǰ����Ϊ������ʼ����ʽ�ǻ�������ģ�ͺ�ţ�ٵڶ����ɣ��ڳ���ǰ���ܴ�����
 (9)
(9)
ʽ�У�cf��cr�ֱ�Ϊǰ���������kf��kr�ֱ�Ϊǰ�����ܸնȣ�mf��mr�ֱ�Ϊǰ������λ�ô���Ӧ�Ļ������������� ��
�� ��
�� �ֱ�Ϊǰ���ܴ�������������λ�ơ��ٶȺͼ��ٶȣ�
�ֱ�Ϊǰ���ܴ�������������λ�ơ��ٶȺͼ��ٶȣ� ��
�� ��
�� �ֱ�Ϊ�����ܴ�������������λ�ơ��ٶȺͼ��ٶȡ�
�ֱ�Ϊ�����ܴ�������������λ�ơ��ٶȺͼ��ٶȡ�
�ڵ�λʱ���ڣ���ʽ(9)����ͬʱ����������øնȡ��������������������ٶȵ�λʱ��������Ĺ�ϵ��
 (10)
(10)
ʽ�У� ��
�� ��
�� ��
�� Ϊ����ϵ����RMSΪ��������
Ϊ����ϵ����RMSΪ��������
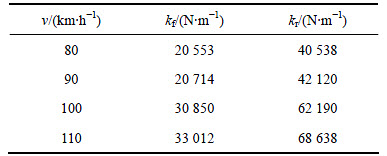
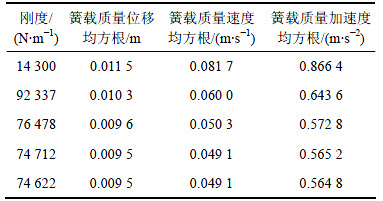
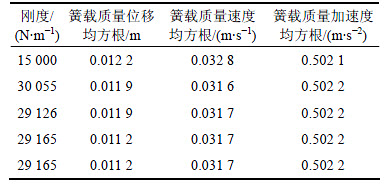
Ϊ��֤ʽ(10)����ɢ�ԣ���B��·�����س���Ϊ60 km/h�����£��趨ǰ��������Ϊ8 300 N��s/m[14](��������5 800 N��s/m������������Ϊǰ���������2��[15])����10 s�ڼ��Ļ����������ź�(������������λ��h���ٶ� �����ٶ�
�����ٶ� )�ľ������������ʽ�����������������ͬ��ʼ�նȵĵ���������10�ͱ�11��ʾ��ʽ(10)���бȽ��ϸ����������Ϊ������ָ��Ķ���ʽ���Ҳ�ͬ�ij�ʼ�ն�(14 300��63 000 N/m)���յ��������������ͬ(����֮��Ϊ0.007%)��ͬ������������ͬ·��ȼ����غɺͳ��ٵĵ������������ʽ(10)�������������ԡ�
)�ľ������������ʽ�����������������ͬ��ʼ�նȵĵ���������10�ͱ�11��ʾ��ʽ(10)���бȽ��ϸ����������Ϊ������ָ��Ķ���ʽ���Ҳ�ͬ�ij�ʼ�ն�(14 300��63 000 N/m)���յ��������������ͬ(����֮��Ϊ0.007%)��ͬ������������ͬ·��ȼ����غɺͳ��ٵĵ������������ʽ(10)�������������ԡ�
��10 ��ʼ�ն�Ϊ14 300 N/m�ĵ������
Table 10 Iteration result for initial stiffness of 14 300 N/m
��11 ��ʼ�ն�Ϊ63 000 N/m�ĵ������
Table 11 Iteration result for initial stiffness of 63 000 N/m
3.2 ȷ������ʽ
Ȼ�����������������ڶ����ֵIJ���Ѱ�Ž�����ںܴ�IJ�࣬�����Ҫ�Գ�ʼ����ʽ��ϵ������������ʹ������Ѱ�Ž��֮��С��5%��Ϊȷ���ն����������ϵ���ı�����յ��������Ӱ�죬ͨ����������Ƚϵ�����նȵı仯��֪���ڸն���ϵ����������Ľ����֮��С���������ϵ����������Ľ����֮����
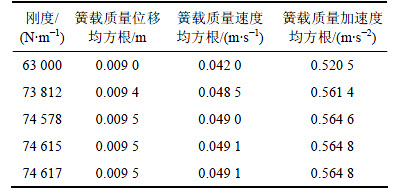
�����������Է���������δ�����ĵ����������(74 622 N/m)Ѱ�Ž��(29 213 N/m)����ˣ��ڲ��ı�����������ϵ����ͬʱ�ĸն��������ϵ����2��ʹ����ڻ�ӽ�Ѱ�Ž�������IJ�����С����������Ϸ����õ�A��·������100 km/h��C��·�����60 km/h�IJ�ͬ����ϵ������������ϵ����ͼ2��ͼ3��ʾ��
ͼ1 A��·������100 km/h����ϵ�����������������
Fig. 1 Correction coefficient and iterative fitting curve of class A full-load with speed of 100 km/h
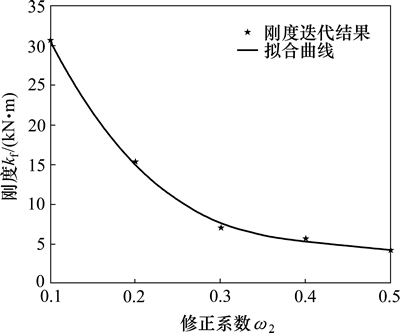
ͼ2 C��·�����60 km/h����ϵ�����������������
Fig. 2 Correction coefficient and iterative fitting curve of class C road-load with speed of 60 km/h
�����������ߣ����Ƚϸ��Թ�����Ѱ�Ž�����õ����յĵ���ʽ��
 (11)
(11)
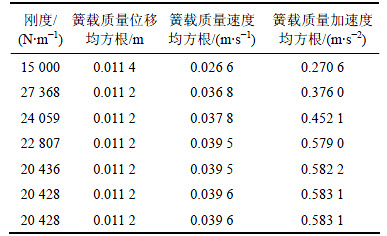
��A��·���C��·��������£�����ʽ(11)�ĵ���������10�ͱ�11��ʾ��
�Աȱ�12�ͱ�13���4�ͱ�9�еĸն�Ѱ�Ž����������ֱ�Ϊ0.16%��1.11%���������ٶ������·���ȼ��ĵ���������������5%֮�ڣ���ʽ(11)����ȷ��Ϊ����ʽ��
��12 A��·�����س���Ϊ100 km/h�ĵ������
Table 12 Iteration result of class A full load with speed of 100 km/h
��13 C��·����س���Ϊ60 km/h�ĵ������
Table 13 Iteration result of class C road-load with speed of 60 km/h
3.3 ��������
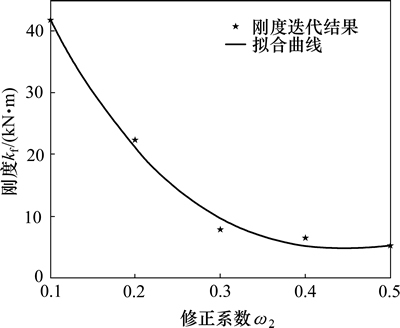
�ɱ�նȰ��������ܶ�̬�������ٿ���������ͼ3��ʾ��
��������ģ�͵Ŀɱ�նȰ���������ϵͳ�նȶ�̬�������ٿ��ƣ���������ģ������λ�ô��Ļ��������������������ǰ�����ܵĸն�ʵʩ��ʱ���ټ��㣬��ͨ��ִ�����������ܸնȣ��������������ܲ����¸�����λ�û���������������ٴν��п��Ƽ��㣬����������ij�ο�������Ļ�������������仯����С��ijһ��ֵʱ(����ѡȡ�ķ�ֵΪ�����������ٶȾ�������ǰһ�ε������֮��С��0.000 2 m/s2)�����ƽ�����
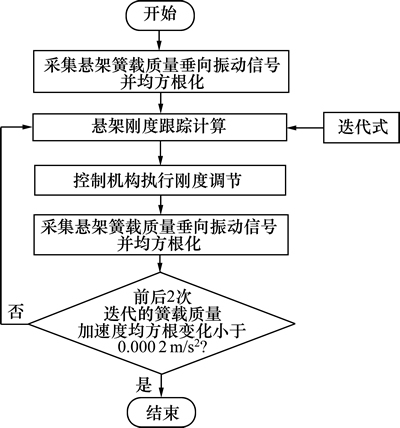
ͼ3 �ɱ�նȰ��������ܶ�̬�������ٿ�������
Fig. 3 Flow of dynamic and trackable interation control of variable stiffness semi-active suspension system
3.4 ����ϵͳ�������
Ϊ��֤��̬�������ٿ��Ʒ�������Ч�ԣ�������A��(80 km/h)��B��(60 km/h)��C��(50 km/h)��Ϲ����£��ȽϿ���ǰ���������ܵı仯����14��ʾΪʵʩ��̬�������ٿ���ǰ��ɱ�նȰ������������ܵĶԱ������
��14 ����ʵʩǰ���������ܶԱ�
Table 14 Passive suspension and semi-active suspension performance comparison
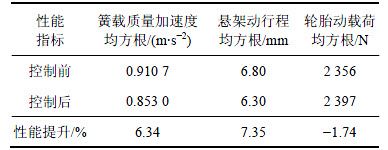
�ɱ�14��֪���Կɱ�նȰ���������ϵͳʵʩ��̬�������ٿ��ƺ���������ٶȾ���������6.34%�����ܶ��г̾�����������7.35%����̥���غɾ���������1.74%������������ٶȺ����ܶ��г̾������õ�һ�����ƣ����ܿ��������������Ϊ���ԡ���̥���غɾ�������С��������������������Χ�ڣ��Գ�������Ӱ�첻���ԣ��������涨����ֵҪ��
4 ����
1) ������ƿɱ�նȰ���������ϵͳ�ĵ���ʽ����������С���˷��������ϵ��������ն����ߣ�ȷ������ʽ������ϵ����������ĵ��������Ѱ�Ž��֮��С��5%���ڴ˻����ϣ�������̬�������ٿ����㷨��
2) �����ػ�Ϲ�����(A��·�泵��80 km/h��B��·�泵�ټ�60 km/h��C��·�泵��50 km/h)��ͨ��������֤����Ч�����Աȿ���ǰ��������������ٶȾ���������6.34%�����ܶ��г̾���������7.35%��������ʻƽ˳�Եõ���ߡ�
�ο����ף�
[1] �¼���. ��������[M]. 3��. ����: ��е��ҵ������, 2009: 199-225.
CHEN Jiarui. Automobile structure[M]. 3rd ed. Beijing: China Machine Press, 2009: 199-225.
[2] Ҧ����, ��ΰ��, ����. ��������������ϵͳ��չ״��[J]. ��������, 2006, 28(3): 276-280.
YAO Jialing, CAI Weiyi, CHEN Ning. A review on the development status of automotive semi-active suspension systems[J]. Automotive Engineering, 2006, 28(3): 276-280.
[3] LAUWERYS C, SWEVERS J, SAS P. Model free control design for a semi-active suspension of a passenger car[C]// Proceedings of ISMA. Seattle: Scientific Research Publishing, 2004: 2206-2211.
[4] �����, ������, ����, ��. ���������ݻ��ɵ��������ܶ�Ŀ�����ƥ��[J]. ��������, 2014, 1(6): 29-33.
JU Longyu, LI Zhongxing, JIANG Hong, et al. Multi-objective parameters matching of air suspension system with volume adjustable auxiliary chamber[J]. Automobile Technology, 2014, 1(6): 29-33.
[5] ����, ���Ʊ�, �ܿ�, ��. ����������ϵͳ��Ƽ�����[J]. ��е����ѧ��, 2005, 41(5): 137-141.
CHEN Long, JIANG Haobin, ZHOU Kongkang, et al. Control and design for semi-active suspension[J]. Journal of Mechanical Engineering, 2005, 41(5): 137-141.
[6] �Կ���. ��������������ģ�������о�[D]. �ϲ�: ������ͨ��ѧ�����복������ѧԺ, 2007: 18-36.
ZHAO Kailin. Research on fuzzy control for vehicle of semi-active suspension[D]. Nanchang: East China Jiaotong University. School of Mechanotronics and Vehicle Engineering, 2007: 18-36.
[7] ARAKI Y. Preview control of active suspension using disturbance information of front wheel[J]. Transactions of the Japan Society of Mechanical Engineers, 1994, 60(578): 3405-3408.
[8] CHOI S B, LEE H K, CHANG E G. Field test results of a semi-active er suspension system associated with skyhook controller[J]. Mechatronics, 2001, 11(3): 345-353.
[9] ������. ���ڻ����������۵Ĵ��������ҿ������ܽ�ģ�����[D]. ��: ���մ�ѧ��е����ѧԺ, 2013: 18-30.
GAO Minghong. Modeling and analysis of air suspension with auxiliary chamber based on electromechanical similarity theory[D]. Zhenjiang: Jiangsu University. School of Automotive and Traffic Engineering, 2013: 18-30.
[10] ��־��. ��������[M]. 5��. ����: ��е��ҵ������, 2009: 203-251.
YU Zhisheng. Elementary vehicle theory[M]. 5th ed. Beijing, China Machine Press, 2009: 203-251.
[11] HAGAN M T, MENHAJ M B. Training feedforward networks with the Marquardt algorithm[J]. IEEE Trans Neural Netw, 1994, 5(6): 989-993.
[12] ����, �����, ������. ���ڲ�η������Ŀ�����ϵͳģ���ۺ�����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2015, 46(2): 631-637.
LI Ning, WANG Liguan, JIA Mingtao. An analytic hierarchy process based fuzzy evaluation of underground mine six-system[J]. Journal of Central South University (Science and Technology), 2015, 46(2): 631-637.
[13] ��ʿ��, ���, ����, ��. һ��ȷ����������LQG���Ƽ�Ȩϵ���ķ���[J]. ������, 2008, 2(27): 65-68.
CHEN Shian, QIU Feng, HE Ren, et al. A method for choosing weights in a suspension LQG control[J]. Journal of Vibration and Shock, 2008, 2(27): 65-68.
[14] �ƶ�ʦ. �����Ŵ��㷨�Ĵ��������ҿ������ܲ����Ż�������о�[D]. ��: ���մ�ѧ��е����ѧԺ, 2013: 20-29.
HUANG Dingshi. Parameter optimization and control based on genetic algorithm of air suspension with auxiliary chamber[D]. Zhenjiang: Jiangsu University. School of Automotive and Traffic Engineering, 2013: 20-29.
[15] ����ҫ. ECAS�ͳ�����ϵͳ��ƥ���������о�[D]. ��: ���մ�ѧ�����뽻ͨ����ѧԺ, 2008: 42-45.
YANG Qiyao. Research on matching and inflating/deflating of suspension system in ECAS-bus[D]. Zhenjiang: Jiangsu University. School of Automotive and Traffic Engineering, 2008: 42-45.
(�༭ �°���)
�ո����ڣ�2016-07-21�������ڣ�2016-09-13
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51575241)������ʡ�����˲Ÿ߷�������Ŀ(2012-ZBZZ-030)�����������ѧ����������Ŀ(51305111)������ʡ��Ȼ��ѧ����������Ŀ(BK20131255) (Project(51575241) supported by the National Natural Science Foundation of China; Project(2012-ZBZZ-030) supported by the Six Talents Peak Foundation of Jiangsu Province; Project(51305111) supported by the Youth Science Foundation of China; Project(BK20131255) supported by the Natural Science Foundation of Jiangsu Province)
ͨ�����ߣ������ˣ����ڣ���ʿ����ʦ���������˹�������Ʒ��ģ��������о���E-mail: la55@163.com
ժҪ��Ϊ��һ����߳�����ʻƽ˳�ԣ���Ͽɱ�նȰ���������ϵͳ���ص㣬�����̬�������ٿ����㷨����Ӧ���ڿɱ�նȰ���������ϵͳ������Matlab/Simulink���������ɶ���������ģ�͡�ѡȡ�����������ٶȡ����ܶ��г̺���̥���غɵľ�����Ϊƽ˳������ָ�꣬ͨ����η�����ȷ��������ָ���Ȩ��ϵ���������Ŵ��㷨ȷ�����������������Ÿնȡ����ö�̬���������㷨�������ܸնȣ��������øն������ŸնȵIJ���ȷ�������㷨������ϵ�����ڵ�������ʹ����Ʋ�����Ѱ�����ò����Ǻϣ��������������µĿ���Ч��������֤������������������Ŀ����㷨�ڻ�Ϲ���������Ч��ʹ�����������ٶȾ�������С6.34%�����ܶ��г̾�������С7.35%���Ӷ���߳�����ʻ��ƽ˳�ԡ�
[1] �¼���. ��������[M]. 3��. ����: ��е��ҵ������, 2009: 199-225.
[2] Ҧ����, ��ΰ��, ����. ��������������ϵͳ��չ״��[J]. ��������, 2006, 28(3): 276-280.
[4] �����, ������, ����, ��. ���������ݻ��ɵ��������ܶ�Ŀ�����ƥ��[J]. ��������, 2014, 1(6): 29-33.
[5] ����, ���Ʊ�, �ܿ�, ��. ����������ϵͳ��Ƽ�����[J]. ��е����ѧ��, 2005, 41(5): 137-141.
[6] �Կ���. ��������������ģ�������о�[D]. �ϲ�: ������ͨ��ѧ�����복������ѧԺ, 2007: 18-36.
[9] ������. ���ڻ����������۵Ĵ��������ҿ������ܽ�ģ�����[D]. ��: ���մ�ѧ��е����ѧԺ, 2013: 18-30.
[10] ��־��. ��������[M]. 5��. ����: ��е��ҵ������, 2009: 203-251.
[13] ��ʿ��, ���, ����, ��. һ��ȷ����������LQG���Ƽ�Ȩϵ���ķ���[J]. ������, 2008, 2(27): 65-68.
[14] �ƶ�ʦ. �����Ŵ��㷨�Ĵ��������ҿ������ܲ����Ż�������о�[D]. ��: ���մ�ѧ��е����ѧԺ, 2013: 20-29.
[15] ����ҫ. ECAS�ͳ�����ϵͳ��ƥ���������о�[D]. ��: ���մ�ѧ�����뽻ͨ����ѧԺ, 2008: 42-45.
