
DOI: 10.11817/j.issn.1672-7207.2016.02.021
��������Ӧ����UKF�Ĵ�����Ŀ�궨λ�㷨
��责�����
(�������̴�ѧ ���ӹ���ѧԺ������ �人��430033)
ժ Ҫ��
�����˲�(IUKF)��Ҫ�˹��趨�������������⣬�����Ŵ��㷨����Ӧ�Ⱥ����ĸ�����һ������Ӧ�����������˲��ĸ����㷨(AIUKF)�����㷨���ù۲�Ԥ��ֵ��ʵ�ʹ۲�ֵ��ϵͳ��������ʵ�ʹ۲�ֵ����Ӧ�Ⱥ�����Ϊ���۱���������Ӧ�Ⱥ����ı�ֵ����Ӧȷ���Ƿ���е��������������������㷨�����ڴ�����ϵͳ��������Ч���IUKF�˹��趨�����������⣬���㷨������IUKF�����൱��������UKF���ܡ�
�ؼ��ʣ�
��������������IUKF�㷨���Ŵ��㷨����Ӧ�Ⱥ���������Ӧ����������UKF�㷨��
��ͼ����ţ�TN953 ���ױ�־�룺A ���±�ţ�1672-7207(2016)02-0503-05
Range-only target location algorithm based on adaptive IUKF
WANG Lu, LIU Zhong
(College of Electronic Engineering, Naval University of Engineering, Wuhan 430033, China)
Abstract: Since the iterated unscented Kalman filter(IUKF ) has the problem of setting iterative times , according to the fitness function from genetic algorithm, an adaptive iterated unscented Kalman filter(AIUKF) was proposed. The new algorithm calculated the fitness of the predicted values and the observed values, the fitness of the sampling points and the observed values, then adaptive adjust whether iteration or not based on the ratio of fitness functions. The simulation results indicate that the AIUKF has better performance than standard UKF in range-only target motion analysis, and can solve the problem of setting iterative times in IUKF.
Key words: iterated measurement update; iterated unscented Kalman filter (IUKF); genetic algorithm; fitness function; adaptive; range-only; unscented Kalman filter (UKF)
������Ŀ����ٶ�λ�����ֳ�Ϊ������Ŀ���˶�������ͨ����ȡ�۲�վ��Ŀ��ľ�����Ϣ����������Щ��ʱ��仯�ľ���������ʵʱ����Ŀ���˶������ļ���[1-3]������������ˮ�����ߴ��������缼���ķ�չ���Դ�����Ŀ���˶�����������о�Խ��Խ���С����ڴ�����������н�ǿ�ķ����ԣ���ͳ�Ĺ��Ʒ�����PLE��MGEKF���Ѳ������á����������˲�(UKF)��Ŀǰ�ܵ��㷺��ע�ķ����Թ��Ʒ���[4-6]�������˼���ǻ�����ζ�任(unscented transformation��UT),ʹ��������С�������Ƶķ������в������£�����״̬���ƺͲ���֮������Թ�ϵ��ʹ�ö��ض�״̬���ƽ��в������£����ڴ�����Ŀ�궨λ������У����������ϴ�ʱ��������ɢ�����⡣һ�����ڹ���ʵ�ֵ���߷����Խ��ƾ��ȵķ�ʽ��ʹ�õ����������·�ʽ[7-8]��ʹ��״̬����ֵ����Ԥ��ֵ�����½���UT�任���õ��˲����������ٴ����ù۲�ֵ������״̬���ƣ��Ӷ����״̬���Ƶľ��ȣ����������������˲��㷨(IUKF)[9-10]������IUKF�㷨��Ҫ�˹��趨������(һ��Ϊ2~3��)[11]��������ʵ������Զ�ѡ���Ƿ������Ŀǰ�������Դ�������б������������������Ŵ��㷨[12-13]����Ӧ�Ⱥ����ĸ�����һ������Ӧ�����������·�ʽ�����۲�Ԥ��ֵ��ϵͳ��������ʵ�ʹ۲�ֵ����Ӧ�Ⱥ�����Ϊ���۱���������Ӧ�Ⱥ�����ֵ����Ӧȷ���Ƿ���в������£��Ӷ���Ч���IUKF�㷨�˹��趨�����������⡣
1 ������ϵͳ����
����Ŀ��������ֱ���˶����۲�վ������ֻ�����˶�ƽ��Ķ�ά���Σ�����ϵ��ͼ1��ʾ��ȡy��Ϊ����x��Ϊ��������ԭ��Ϊ�۲�վ�ij�ʼλ�ã�tkʱ��Ŀ����˶�״̬Ϊ ���۲�վ�˶�״̬Ϊ
���۲�վ�˶�״̬Ϊ �����У�
������ ��
�� �ֱ�ΪĿ�ꡢ�۲�վλ�õ�X�������
�ֱ�ΪĿ�ꡢ�۲�վλ�õ�X������� ��
�� �ֱ�ΪĿ�ꡢ�۲�վλ�õ�Y�������
�ֱ�ΪĿ�ꡢ�۲�վλ�õ�Y������� ��
�� �ֱ�ΪĿ�ꡢ�۲�վ�ٶȵ�X�������
�ֱ�ΪĿ�ꡢ�۲�վ�ٶȵ�X������� ��
�� �ֱ�ΪĿ�ꡢ�۲�վ�ٶȵ�Y���������Ŀ����۲�վ������˶�״̬�ɱ�ʾΪ
�ֱ�ΪĿ�ꡢ�۲�վ�ٶȵ�Y���������Ŀ����۲�վ������˶�״̬�ɱ�ʾΪ
 ��
��
���� ��
��
ϵͳ״̬����Ϊ
 (1)
(1)
���У� ��TsΪ����ʱ���
��TsΪ����ʱ���
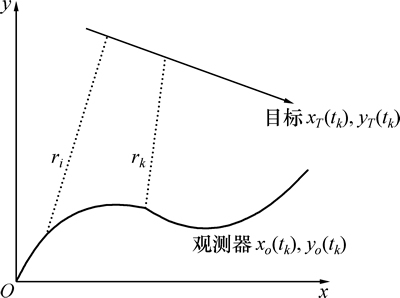
ͼ1 �۲�վ��Ŀ���ڶ�ά�ռ伸�ι�ϵ
Fig. 1 Geometrical relation between observer and target in 2D space
����ϵͳ����U(tk)�Ǿ�ֵΪ0������ΪQ(tk)�ĸ�˹��������
��������Ϊ
 (2)
(2)
���У�r(tk)Ϊtkʱ��Ŀ����۲�վ�ľ��룻�������� �Ǿ�ֵΪ0������ΪR(tk)�ĸ�˹��������
�Ǿ�ֵΪ0������ΪR(tk)�ĸ�˹��������
2 ����Ӧ����UKF�˲��㷨(AIUKF)
2.1 IUKF�㷨
UKF�㷨�ĺ�����UT�任[14]��ʹ��������С�������Ʒ������в������£��ò������·�������״̬�����ǹ۲��������Ժ��������ڷ�����ϵͳ��˵����ֻ��һ�ֽ��Ƶĸ��·�ʽ�����ڴ�����ϵͳ���н�ǿ�ķ����ԣ�ʹ��UKF�㷨����״̬����ʱ�����׳��ַ�ɢ�������
���ϵͳ����״̬�������½���UT�任�����Եõ�����ȷ�ƽ���ʵ���ƵIJ����㣬Ȼ����һ�����ù۲�ֵ���ƶ�״̬�Ĺ��ƣ����Խ�һ�����״̬���Ƶľ��ȣ���IUKF�㷨���㷨�������¡�
����1����ʼ����
1) ϵͳ��ʼ��״̬���ƣ�

����2��ѡȡ�����㡣
2) �������ѡȡ��Ȩֵ��ȷ����
���У�����ȡ0.001���������˲���������ھ�ֵ�ķֲ���������ڸ�˹�ֲ�ʱ���ȡֵΪ2������ʾ����״̬�����ֲ�������֪ʶ�� Ϊ����
Ϊ���� �ľ������ĵ�i�У�
�ľ������ĵ�i�У� Ϊ�߶ȵ������ӣ�
Ϊ�߶ȵ������ӣ� ͨ��ȡ0��
ͨ��ȡ0�� Ϊ��ֵȨֵ��
Ϊ��ֵȨֵ�� ΪЭ�����Ȩֵ��
ΪЭ�����Ȩֵ��
����3��ʱ����¡�
3) ����ϵͳ״̬���̱任������ ��
��
4) ����Ԥ�����ֵ ��
��
5) ����Ԥ��Э���
 ��
��
����4���������¡�
6) ���� ��
�� ����ѡȡ�����㣬ֱ���������������õ��µIJ�����
����ѡȡ�����㣬ֱ���������������õ��µIJ����� ��Ԥ�����ֵ
��Ԥ�����ֵ ��Ԥ��Э����
��Ԥ��Э���� ��
��
����5������Ԥ�����ֵ��
7) ͨ���������̼����������Ӧ�IJ���ֵ  ��
��
8) ����Ԥ�����ֵ ��
��
����6��������¡�
9) ������Ϣ���
 ��
��
10) ������ ������
������  ��
��
11) ����Kalman���� ��
��
12) ����������� 
 ��
��
13) ����״̬ ��
��
2.2 AIUKF�㷨
IUKF�㷨��Ҫ�˹��趨�������������ܸ��ݲ���������ʵ����ֵ�ıƽ��̶��Զ�ѡ���Ƿ������Ϊ�˽��������⣬�����Ŵ��㷨�еĸ�����Ӧ�Ⱥ� ��[15]��IUKF�㷨���иĽ����ֱ����Ԥ�����ֵ��ʵ�ʹ۲�ֵ����������ʵ�ʹ۲�ֵ����Ӧ�Ⱥ�����������Ӧ�Ⱥ�����ֵȷ����������Ŀ����ʵ���Ƶ�ƫ��ȣ��Ӷ�����Ӧȷ���Ƿ���е������²��������岽�����¡�
1) ������Ӧ�Ⱥ�����
Ԥ�����ֵ��ʵ�ʹ۲�ֵ����Ӧ�Ⱥ���fFitness1Ϊ
��������ʵ�ʹ۲�ֵ����Ӧ�Ⱥ���fFitness2Ϊ
��Ӧ�Ⱥ����ȣ� ��
��
���У�ΪԤ�����ֵ�� Ϊʵ�ʹ۲�ֵ��
Ϊʵ�ʹ۲�ֵ�� Ϊ�����㣻RΪ�۲��������
Ϊ�����㣻RΪ�۲��������
2) �Ƿ�����оݡ�
���ѣ�1����ʾ��������Ч�ƽ���ʵ���ƣ����е����������£����ѡ�1����ʾ����������ʵ����ƫ��ϴ������Ԥ�����ֵ��Ԥ��Э����������ѡȡ�����㣬����IUKF�㷨����7)��8)�ɵ��µ�Ԥ�����ֵ��
 (3)
(3)
���У�WiΪ���i�����������Ӧ��Ȩ�أ� Ϊ�µIJ������Ӧ�IJ���ֵ��
Ϊ�µIJ������Ӧ�IJ���ֵ��
��ʽ(3)����IUKF�㷨����9)������������¡�AIUKF�㷨һ�μ��������ͼ2��ʾ��
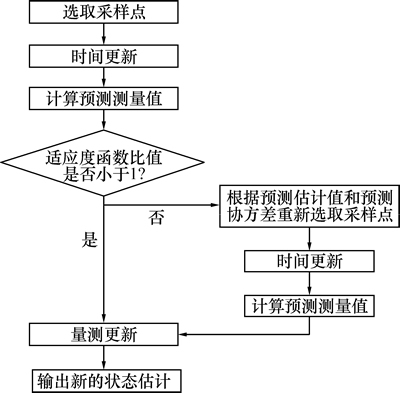
ͼ2 AIUKF�������
Fig. 2 Flow chart of AIUKF arithmetic
3 �������
����Ŀ��������ֱ���˶�����ʼλ��Ϊ(1 000 m��1 000 m)������� ���ٶ�vx=10 m/s��vy=10 m/s���۲�վ������ת���˶���ת���ʦ�=0.08��������100�η��棬����ʱ����ΪT=10 s����������Ӿ�ֵΪ0��������Ϊ10 m�ĸ�˹��������IUKF�㷨�ĵ��������趨Ϊ2�Ρ����þ��������(��RMSE)����ʾĿ�궨λ����ٵľ��ȣ�����
���ٶ�vx=10 m/s��vy=10 m/s���۲�վ������ת���˶���ת���ʦ�=0.08��������100�η��棬����ʱ����ΪT=10 s����������Ӿ�ֵΪ0��������Ϊ10 m�ĸ�˹��������IUKF�㷨�ĵ��������趨Ϊ2�Ρ����þ��������(��RMSE)����ʾĿ�궨λ����ٵľ��ȣ����� (���У�XΪ��ʵֵ��
(���У�XΪ��ʵֵ�� Ϊ����ֵ)�����������ͼ3~5�ͱ�1��ʾ��
Ϊ����ֵ)�����������ͼ3~5�ͱ�1��ʾ��
��1 �㷨���ܱȽ�
Table 1 Performance comparison under different algorithms

��ͼ3���Կ����� UKF��λ��״̬��������ƫ����ʵ״̬��IUKF��AIUKF��������Ч���UKF�㷨��ɢ�����⡣��ͼ4��5���Կ�������������3���㷨������ʵ��Ŀ���ٶȵ��ȶ����ƣ�����IUKF��AIUKF�ٶȹ��Ƹ��ӽ�����ʵֵ���ɱ�1���Կ�����AIUKF������������UKF���ܣ�����IUKF�����൱��
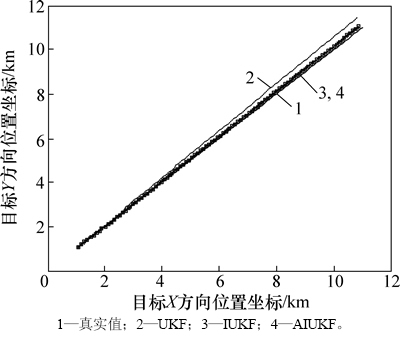
ͼ3 Ŀ���˶��켣����
Fig. 3 Estimation of target trajectory
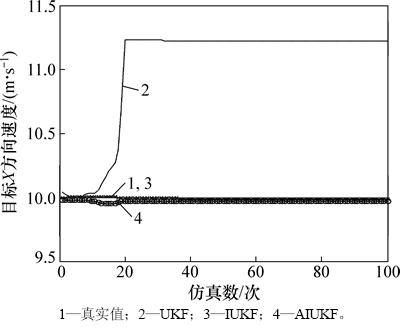
ͼ4 Ŀ��X�����ٶȹ���
Fig. 4 Estimation of target velocity in X direction
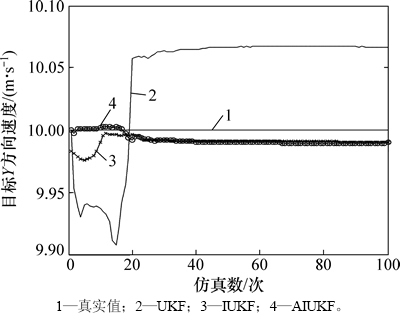
ͼ5 Ŀ��Y�����ٶȹ���
Fig. 5 Estimation of target velocity in Y direction
������������AIUKF�����ڴ�����Ŀ�궨λ����٣��㷨������IUKF�����൱��������UKF���ܣ�ͬʱ������Ч�ؽ��IUKF��Ҫ�˹��趨�����������⡣
4 ����
1) ���Ŵ��㷨�е���Ӧ�Ⱥ�����˼������IUKF�㷨��������Ӧ�Ⱥ����ı�ֵ����Ӧȷ���Ƿ���в������£���Ч������˹��趨�����������⡣
2) AIUKF�㷨�����ڴ�����Ŀ�궨λ����٣����㷨�������á�
�ο����ף�
[1] TAEK L S. Observability of target tracking with range-only measurement[J]. IEEE Journal of Oceanic Engineering, 1999, 24(3): 383-387.
[2] ���ٿ�, ������, �����. ��վ��Դ��λ���ټ���[M]. ����: ������ҵ������, 2008: 21-29.
SUN Zhongkang, GUO Fucheng, FENG Daowang. Passive location and tracking technology by single observer[M]. Beijing: National Defense Industry Press, 2008: 21-29.
[3] BRANKO R, SANJEEV A, JAMES M. Target motion analysis using range-only measurements algorithm performance and application to ISAR data[J]. Signal Processing, 2002, 82(2): 273-296.
[4] �߲�, ��ҫ��, ���. ��������ӦUKF�ĵ�վ��Դ��λ�㷨[J]. ��Ϣ���̴�ѧѧ��, 2012, 13(5): 578-582.
GAO Bo, HUANG Yaoguang, LI Jianxin. Single-observer passive location algorithm based on adaptive UKF[J]. Journal of Information Engineering University, 2012, 13(5): 578-582.
[5] ZHEN L, HUA J F. Modified state prediction algorithm based on UKF[J]. Journal of System Engineering and Electronics, 2013, 24(1): 135-140.
[6] ���, ��ⴺ, ����ΰ, ��. ���ڼ�����Ȼ�����������㷨������ӦUKF�㷨[J]. �Զ���ѧ��, 2012, 38(7): 1200-1210.
WANG Lu, LI Guangchun, QIAO Xiangwei, et al. An adaptive UKF algorithm based on maximum likelihood principle and expectation maximization algorithm[J]. Acta Automatic Sinica, 2012, 38(7): 1200-1210.
[7] ������, ������. һ���µĻ�ϵ���UKF[J]. �人��ѧѧ��(��Ϣ��ѧ��), 2012, 37(6): 701-703.
CHANG Guobin, XU Jiangning. A new kind of hybrid iterated unscented kalman filter[J]. Geomatics and Information Science of Wuhan University, 2012, 37(6): 701-703.
[8] ��ѧ, �����. ����Ӧ����ƽ����UKF�ĵ�վ��Դ��λ�㷨[J]. ���������̴�ѧѧ��, 2011, 32(3): 372-377.
LIU Xue, JIAO Shuhong. Adaptive interated SRUKF for single observer passive location[J]. Journal of Harbin Engineering University, 2011, 32(3): 372-377.
[9] FENG Z, JIANG N X, JING S L, et al. IUKF neural network modeling for FOG temperature drift[J]. Journal of System Engineering and Electronics, 2013, 24(5): 838-844.
[10] л��, ��, ��һ��. ���ڵ����������µ�UKF���� [J]. ���пƼ���ѧѧ��(��Ȼ��ѧ��), 2007, 35(11): 13-16.
XIE Kai, JIN Bo, ZHOU Yiyu. Iterated unscented Kalman filter[J]. J Huazhong Univ of Sci Tech (Natural Science Edition), 2007, 35(11): 13-16.
[11] ��ˮӢ, ë����. ������ζ�������˲���[J]. ���ݲɼ��봦��, 2009, 24(7): 43-48.
CHENG Shuiying, MAO Yunxiang. Interated unscented kalman filter[J]. Journal of Data Acquisition & Processing, 2009, 24(7): 43-48.
[12] WANG Hong, LI Haijuan, ZHAO Yue, et al. Genetic algorithm for scheduling reentrant jobs on parallel machines with a remote server[J]. Transactions of Tianjin University, 2013, 19(6): 463-469.
[13] FAN Wenhao, LIU Yuanan, WU Fan. Optimal resource allocation for transmission diversity in multi-radio access networks: a coevolutionary genetic algorithm approach[J]. Science China (Information Sciences), 2014, 57(14): 1-14.
[14] ����, ����. UKF�㷨�ڴ���λĿ���˶������е�Ӧ��[J]. �Ͼ�������ѧѧ��(��Ȼ��ѧ��), 2008, 32(2): 222-226.
LIU Jian, LIU Zhong. Application of UKF in bearings-only target motion analysis[J]. Journal of Nanjing University of Science and Technology (Natural Science), 2008, 32(2): 222-226.
[15] LIANG Yue, LIU Zhong. Passive target tracking using an improved particle filter algorithm based on genetic algorithm[C]//Lecture Notes in Electronical Engineering (ISNN2010). Shanghai: Springer Verlag, 2010: 559-566.
(�༭ �°���)
�ո����ڣ�2015-02-13�������ڣ�2015-04-20
������Ŀ(Foundation item)����װԤ�л���������Ŀ(9140A01060113JB11001)(Project (9140A01060113JB11001) supported by GAD advanced Research Found)
ͨ�����ߣ���责���ʿ�о�������ʦ������Ŀ������붨λ��ϵͳ��ģ������о���E-mail��wanglu_1984@126.com
ժҪ����Ե������������˲�(IUKF)��Ҫ�˹��趨�������������⣬�����Ŵ��㷨����Ӧ�Ⱥ����ĸ�����һ������Ӧ�����������˲��ĸ����㷨(AIUKF)�����㷨���ù۲�Ԥ��ֵ��ʵ�ʹ۲�ֵ��ϵͳ��������ʵ�ʹ۲�ֵ����Ӧ�Ⱥ�����Ϊ���۱���������Ӧ�Ⱥ����ı�ֵ����Ӧȷ���Ƿ���е��������������������㷨�����ڴ�����ϵͳ��������Ч���IUKF�˹��趨�����������⣬���㷨������IUKF�����൱��������UKF���ܡ�
[2] ���ٿ�, ������, �����. ��վ��Դ��λ���ټ���[M]. ����: ������ҵ������, 2008: 21-29.
[4] �߲�, ��ҫ��, ���. ��������ӦUKF�ĵ�վ��Դ��λ�㷨[J]. ��Ϣ���̴�ѧѧ��, 2012, 13(5): 578-582.
[6] ���, ��ⴺ, ����ΰ, ��. ���ڼ�����Ȼ�����������㷨������ӦUKF�㷨[J]. �Զ���ѧ��, 2012, 38(7): 1200-1210.
[7] ������, ������. һ���µĻ�ϵ���UKF[J]. �人��ѧѧ��(��Ϣ��ѧ��), 2012, 37(6): 701-703.
[8] ��ѧ, �����. ����Ӧ����ƽ����UKF�ĵ�վ��Դ��λ�㷨[J]. ���������̴�ѧѧ��, 2011, 32(3): 372-377.
[10] л��, ��, ��һ��. ���ڵ����������µ�UKF���� [J]. ���пƼ���ѧѧ��(��Ȼ��ѧ��), 2007, 35(11): 13-16.
[11] ��ˮӢ, ë����. ������ζ�������˲���[J]. ���ݲɼ��봦��, 2009, 24(7): 43-48.
[14] ����, ����. UKF�㷨�ڴ���λĿ���˶������е�Ӧ��[J]. �Ͼ�������ѧѧ��(��Ȼ��ѧ��), 2008, 32(2): 222-226.
