
DOI�� 10.11817/j.issn.1672-7207.2019.06.030
���Ǹ���ͣ����Լ�������ٴŸ��г��ٶ����߽����Ż�����
������1,����1, 2,����ӥ1,������1,������1,����֮2
��1. ������ͨ��ѧ ��ͨ����ѧԺ��������100044��
2. ������ͨ��ѧ �����ͨ�����밲ȫ�����ص�ʵ���ң�������100044��
3. �г���ɽ������������˾���ӱ� ��ɽ��064000��
ժ Ҫ��
�г�����ѧģ�ͺͽ������й���ת�����еĻ����ϣ����һ������������·����Ϊ���ݻ��ֳ�����Ȼ�����ض���������˫���ٶȷ������ߵ��ٽ��Ϊ���ݽ�һ��ϸ������Ľ�ģ˼�룬������������Ŀ������ʱ��Լ���µĶ������г��ٶ����߽����Ż�ģ�ͣ�������һ�ֻ��ڲ�ͬ���й���ת��������˼·�Լ��������г������ٶ����ߵ�Pareto�Ż��������о�����������������г��ٶ����߽����Ż������Աȣ������Ż�������ԴŸ��г����е������Ժ��Ż�Ч�����á�
�ؼ���:��·���䣻���ٴŸ����ٶ����ߣ�����ͣ������Pareto
��ͼ�����:U293.1 ���ױ�־��:���ױ�ʶ��:A ���±��:1672-7207��2019��06-1499-08
Optimal energy-efficient trajectory planning for middle-speed maglev considering constraint of auxiliary stopping area
CHAI��Xiaofeng1, LIU��Jun1, 2, LAI��Qingying1, MENG��Lingyun1, DING��Wenliang1, XU��Yazhi2
(1. School of Traffic and Transportation, Beijing Jiaotong University, Beijing 100044, China��
2. State Key Laboratory of Rail Traffic Control and Safety, Beijing Jiaotong University, Beijing 100044, China��
3. CRRC Tangshan Co. Ltd., Tangshan 064000, China)
Abstract: Based on the analysis of the kinetic equations of the middle-speed maglev and the switching sequence of energy-efficient operation conditions, the running line was divided into different scenes according to the line parameter. Then the scene was divided into different sections further according to the crossover point of the double protected curve. The model was established to optimize energy-efficient trajectory of multiple sections under the constraint of the target running time. And then the model was given a resolving thought based on different switching point of operation conditions and the Pareto optimization method to optimize the energy-efficient trajectory planning of multiple sections. The results show that the applicability and optimization for the maglev of the optimization method is better than that of the existing energy-efficient trajectory planning optimization methods.
Key words: railway transportation; middle-speed maglev; trajectory planning; auxiliary stopping area; Pareto
����ʮ���塱���ҿƼ����¹滮��[1]��ǿ��Ҫ��ǿ���ٴŸ��Ĺؼ��������豸�з���ʱ��Ϊ200 km/h�����ٴŸ��г���Ϊһ�����ͽ�ͨ��ʽ�����ҹ������Ⱥ�ijǼʺ��н������������ܶ�ͨ�ڽ�ͨ������Ҫ��λ��ͨ���Ż��г������ٶ����ߣ�������һ��Լ�������£���Ŀ������ʱ����������������Ѱ���ܺ���С�����ٶ�����[2-3]�����ڽ������ٴŸ������ܺľ�����Ҫ���á�Ŀǰ�������ֹ��г������ܺĵ��о���Ҫ�������г��ٶ����ߵĽ����Ż���ICHIKAWA[4]�������ſ������۶��г��ٶ���������������о���MILROY��[5]��������С��ǣ���ܺĵ��ٶ������Ż�ģ�ͣ���������ٶ�����ֻ�����ڡ����ǣ�������С�����ƶ���3���������й�����ASNIS��[6]����Dubovitskii-Milyutin���ֵԭ��֤���г������ٶ��������ɡ����ǣ����Ѳ�������С�����ƶ���4�����й�����ɡ�֮��HOWLETT��[7-9]�ڷ����г��������й���������ת�������Լ�����ת����ʱ��������÷����Է�������ת���㣬�Ӷ���������г������ٶ����ߵĻ�����������˧[10]��ϳǹ��г�ǣ��Ч�����Խ��������ٶ������Ż�ģ�ͣ������ܺ��������ת����������Ż����������Ż�Ŀ���ǽ�ʱ�����ܣ������ٿ����ƶ����������ģ���ȱ���˿����ʶ�Լ����Ŀǰ����ԴŸ��г������ܺ��о��У���Ÿ��������ޣ��о��ɹ����١���[11]���ü��������������е��ٴŸ��г��ڿ��١����ʡ����õȲ�ͬ���в����µ��ٶ����ߣ�ȴδ���Ǹ���ͣ������Ӱ�졣���[12]����·���١�����ͣ����Ӱ�졢�˿����ʶ�Լ���������£�ͨ����ƴŸ�����ƽ̨���������ٶ����ߣ�������淽����Ϊ��ʱ�����[13-14]���������ʱ���ٶ����ߵĻ�����ȷ�������л���ķ�ʽ�Ż����ٴŸ��г����ٶ����ߣ�����·ѡ����ǵ�һ���١����¶ȵ��������Σ�����������·���ٱ仯Ƶ�������Ρ����ֹ���·�г���ȣ��Ÿ��г��Ӽ�������ǿ��ʱ��̣��Գ˿����ʶ�Ӱ��ϴ��ҴŸ���·�и���ͣ����������ʹ�г������ٶ�������˫���ٶȷ���Լ�����������ֹ��г��ٶ������Ż��о�����ֱ��Ӧ���ڴŸ�ϵͳ�����дŸ��г��ٶ������Ż��о���ͬʱ���Ǹ���ͣ����Ӱ��Ͷ����١���ͬ�¶ȵ���·����Լ�����о��ɹ����١���ˣ��������߶Ի��ڶ��(���ǣ����Ѳ�������С�����ƶ�)����Լ��(����ʱ��Լ��������ͣ����Լ�������ʶ�Լ����)���ೡ��(��ͬ���١��¶�)�����ٴŸ��г��ٶ������Ż���������о���
1 ��������
���ٴŸ��г��Ķ���ѧģ���Ǽ����г��ٶ����ߵĻ������ݣ�Ҳ�Ƿ����г��������й�����������ת�������Լ�����֮��ת����Ļ���[10]��
1.1���г����ж���ѧ���̡�
�������г���������ʾ��ͼ��ͼ1��ʾ�����ٴŸ��г����й������ܵ�ͬ��ֱ�ߵ����ǣ����









�г����ж���ѧ��������[13]��

ʽ�У�

ͼ1���Ÿ��г���������ʾ��ͼ
Fig. 1��Schematic diagram of longitudinal force of maglev train
1.2���������й�������ת�����С�
�������ٴŸ��г������й����в�ͬ���������һ��ɽ������й��̷�Ϊ���ǣ����Ѳ�������С�����ƶ�4�ֽ������й���[6]����ͼ2��ʾ��
ͼ2���������й���ʾ��ͼ
Fig. 2��Schematic diagram of energy-efficient operation conditions
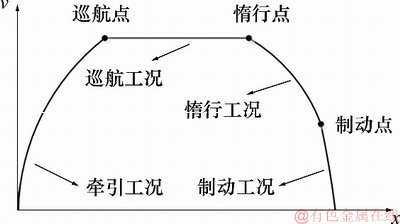
�г�����ͬ��������������ʱ������ܹ���ת������Ϊ���ǣ����Ѳ�������С�����ƶ������ֹ����ij���ʱ������ʵ������IJ�ͬ�������仯[10]����ͼ3��ʾ�������ܺĻ�������������Լ���г������ٵ���·������٣�������ת������Ϊ���ǣ�������С�����ƶ���
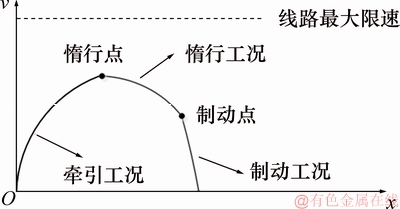
ͼ3�����ǣ�������С�����ƶ�����ʾ��ͼ
Fig. 3��Schematic diagram of maximum traction-coasting-maximum braking condition
2 ���ٴŸ��г��ٶ����߽����Ż�ģ��
�������ٴŸ��г��ٶ������Ż��ܵ���·����������ͣ�������á����й�����ǰ����������Լ����ͬԼ����������⾫�Ȳ���ϴ��Ҽ����о����������Խ������������Լ�µ��ٶ������Ż����⣬��˽���ЩԼ������ϸ��Ϊ����(������·����)������(���ݸ���ͣ��������)�������ȡ�Ϊ��ϸ����ⲻͬ�������ٶ������Ż����⣬���á��Ȼ��ֳ�������ϸ�����䡱�����������̽�ģ�����������������г��ٶ����߽����Ż�ģ�ͣ�����������Լ�������¶Խ������й���ת������������Ż���
2.1���������仮�֡�
�����ٴŸ��г����й����У�����Ҫ����������·���������¶ȡ����ٵȣ��������ٰ����������١��������١��������ٵȣ����¶��Լ����پ���ͬ��������·����Ϊͬһ�ೡ�������⣬�������˸���ͣ������Ӱ�죬�������ٴŸ���·ֻ�ڳ�վ����ͣ�������趯���죬���ṩ��ȫ����ݵ���ɢͨ�����Ա�֤�ÿͰ�ȫ�ͷ����ų��г�����[15-16]�������κ�����¶����뱣֤�Ÿ��г��ܹ���ȫͣ��ͣ�����ϣ����г������ٶ�Ҫʱ������˫���ٶȷ���Լ��[17-18]���ڴŸ���·��ǰ����ͣ������˫���ٶȷ������ߴ��ڽ��㣬���ٶȷ���������ٽ�㣬��ͼ4��ʾ������




���ٴŸ��г��ٶ������Ż�������һ����Լ�����ೡ���ķ����Թ滮���⣬��⸴�Ӷȴ�[19]�������Ƚ��ೡ����·ת��Ϊ�����һ������Ͽ��ǣ��ٸ��ݸ���ͣ���������������һ����ϸ��Ϊ��ͬ���䣬��������·�����Ż�����ת��Ϊ��������Ͻ����Ż����һ��ֳ���������ʱ����Ҫ������·���Ժ������ٶȰ�ȫ����ˣ����Ľ����ٴŸ��г����й����������١��¶Ȼ���Ϊ����������������ٽ��λ��ϸ��Ϊ������䣬���ֲ������£�
Step 1 �������Լ��¶���ͬ����·����Ϊͬһ�ೡ����
Step 2 ��ͬһ���������ٽ��Ϊ�����ٽ������仮�֣����ٽ��λ�ô�������߽硣
����·�ܳ���Ϊ





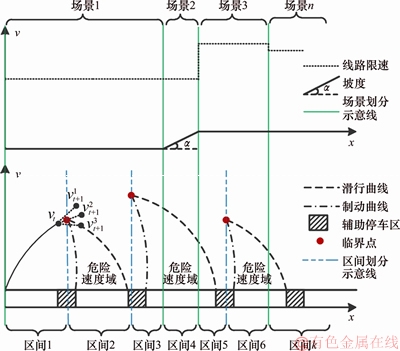
ͼ4�����仮��ʾ��ͼ
Fig. 4��Schematic diagram of section division
2.2��Ŀ�꺯����Լ��������
ģ�ͼ������£�
1) ��֪��·����������ǣ���ƶ������ԣ�����֪�Ÿ���·���١��¶ȡ�����ͣ���������ã��Ÿ�����������ǣ�����ߵȣ�
2) ��ǣ����Ѳ�����ƶ������������������й����ܺ���Ϊ0��������������������ܡ�
��ģ���Ż�Ŀ�����г��������ܺģ���Լ������������·���١�˫���ٶȷ���Լ�������ٶ�Լ�������ٶȳ����Լ�����߽�Լ������������������Լ���ȡ�
Ŀ�꺯����

ʽ�У�




Լ���������£�
1) ��·����Լ����

ʽ�У�
2) ˫���ٶȷ���Լ����

ʽ�У�

3) ���ٶ�Լ����

ʽ�У�

4) ���ʶ�Լ����

ʽ�У�
5) �߽�Լ����

ʽ�У�TmΪĿ��������ʱ�䡣
6) ��������������Լ����

ʽ�У�






2.3��ģ�����
���Ĺ���ģ��ʱ��������·���Ȼ��ֳ�������ϸ�����䡱��Ϊ�˽�������Ѷȣ����ģ��ʱ��Ը���������÷ֲ�����Ż�������1����ⵥ������������й���ת���㣬Ŀ����ÿ�������г�����ʱ����С����2���ڸ�������ת����Ļ����ϣ�����ParetoѰ�ŷ����������������Ż��������������й���ת���㣬Ŀ����������������ʱ��Լ����ʹ�г������ܺ���ͣ���ͼ5��ʾ��
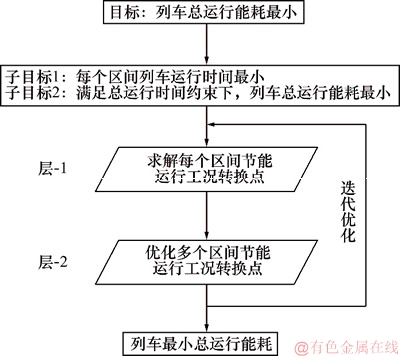
ͼ5���ֲ��Ż�ʾ��ͼ
Fig. 5��Schematic diagram of hierarchy optimization
2.3.1�����ܹ���ת��������
�������١��¶Ⱦ���ͬ�ĴŸ���������









2.3.2��Pareto�Ż����ܹ���ת����
����

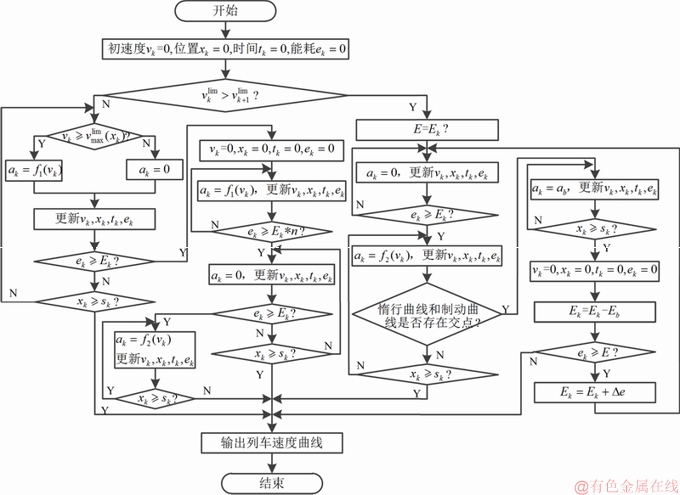
ͼ6����k���乤��ת��������㷨����ͼ
Fig. 6��Flow diagram of algorithm to solve the kth section switching point of operation conditions
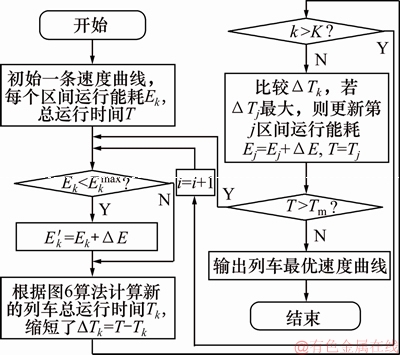
ͼ7��Pareto�Ż������ٶ������㷨����ͼ
Fig. 7��Flow diagram of algorithm to optimize energy-efficient trajectory planning by Pareto
3 ������֤
3.1���������ݡ�
���ٴŸ���·���鳤��Ϊ20.00 





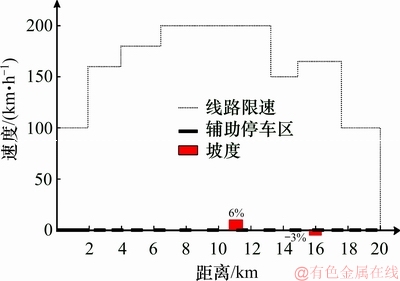
ͼ8�����ٴŸ���·ʾ��ͼ
Fig. 8��Schematic diagram of middle-speed maglev line
��1������ͣ��������
Table 1��Auxiliary stopping area km

��2����·����
Table 2��Speed limit of line

��3����·�¶�
Table 3��Gradient of line

3.2�����������
���IJ���Matlab�������з�����㡣������֤�У�����2.1�ڽ�������·����Ϊ17�����䣬��








3.2.1���Ż��������
�Ż����г�����ʱ��Ϊ539.70
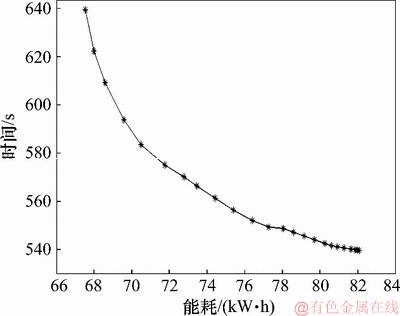
ͼ9�������ܺ�������ʱ���ϵ
Fig. 9��Diagram of operation energy consumption and running time
3.2.2���Ż������Աȷ���
��˧[10]�����г������ٶ����ߵ��Ż������������й���ת���������㷨��ǣ����Ѳ�������С��ƶ������к������ƶ��ܺġ��ڿ����ƶ��ܺ������£��������㷨������[10]���Ż����߽��жԱȣ������ͼ10��ʾ����ͼ10�ɼ�������[10]���Ż��õ����ܺıȱ����㷨�Ľ���ͣ�����õ��������ٶ����ߴ��ڶദ(��ͼ10��Ȧ����λ����ʾ)���ٶȱ仯�ʴ���0.50 
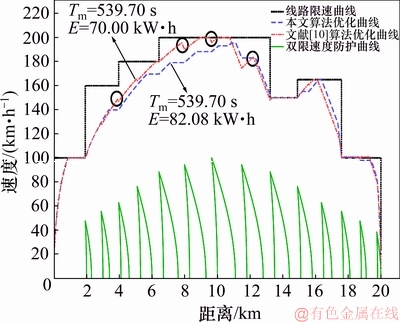
ͼ10�������㷨������[10]�Ż����߶Ա�
Fig. 10��Comparison of optimization curves of algorithms in this paper and Ref.10
��4�������㷨������[13]�㷨�Ż�����Ա�
Table 4��Comparison of optimization results of algorithms in this paper and Ref.[13]

���[13]������С�����ٶ����ߵ��Ż��������������ʱ���ٶ�������ȷ�������л��������������ܺġ��������㷨������[13]���㷨���бȽϣ������ͼ11��ʾ����ͼ11�ɼ��������ʱ���ٶ������Ͻ���3��λ�ÿ�ѡ������л��㣬����Ϊ��ѡ��Ķ������ߣ������ܴ��ڿ�Խ���ٷ�����Σ��(��ͼ11����Ӱ������ʾ)���ȽϿɵã�ͼ11��ʵ������ʾλ�ü�Ϊ��С���������¶��й����л�����ʼ�����ֹ�㡣��Ŀ��������ʱ��TmΪ562.00 s���Ż�������4��ͼ12��ʾ���ɼ��������Ż������õ����ܺĸ��ͣ�����ԴŸ��г������÷�Χ���㣬�����Խ���ٷ�����Σ�ա���ˣ������㷨����ʵ�ִŸ��г��ٶ����߽����Ż����ҿ˷��˼����������Խ���ೡ�����Ż��IJ��㡣
���Ͽ�֪������[10]��[13]�е��㷨ֻ�����ij���ض�Լ�������ٶ������Ż����⣬�������㷨��ʵ�ּ����㷨Ч���⣬���������ƶ��ܺġ��˿����ʶ�������˫���ٶȷ���Լ�������������ε������Եȣ��ܸ��õؽ���������Լ�����ೡ���µ��г��ٶ������Ż����⡣
4 ����
1) �����ٴŸ�����ѧģ�ͼ��������й���ת�����еĻ����ϣ����һ�ֿ�������Լ������ͣ�������õ��г��ٶ����߽����Ż�ģ�ͣ���ģ�ͽ��¶ȡ����ٵ���Ϊ���ֳ��������ݣ���˫���ٶȷ����ٽ����Ϊ��һ��ϸ����������ݡ��ڲ�ͬ�������У���������Լ��������ͨ���ֲ��Ż�������⣬�ȸ���ÿ����������й���ת�������ⷽ������ͨ��ParetoѰ�ŷ���������Ԫ�Ż��������г������ٶ����ߡ�
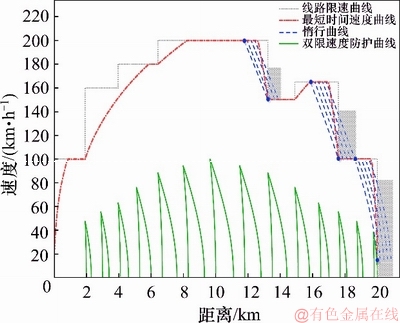
ͼ11������[13]���ʱ���ٶ����߶����л���ʾ��ͼ
Fig. 11��Schematic diagram of coasting switching points of shortest time speed curve in Ref.[13]
2) ���������������㷨��ȣ������㷨���Ż�Ч�����ã����ڴŸ���·�����������Ը�ǿ��������Ч�˷��ٶ������Ż������ж������Լ�����ೡ���IJ��㡣
3) ģ���п����г������ƶ���������δ���о��ķ���֮һ��
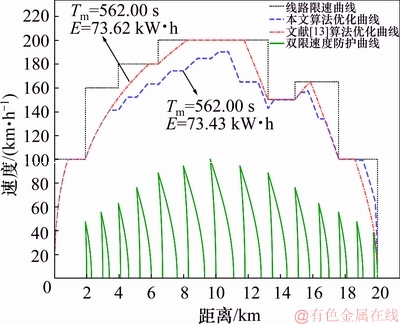
ͼ12�������㷨������[13]�Ż����߶Ա�
Fig. 12��Comparison of optimization curves of algorithms in this paper and Ref.[13]
�ο����ף�
[1] ����Ժ. ��ʮ���塱���ҿƼ����¹滮[EB/OL]. [2016��08��08]. http://www.gov.cn/zhengce/content/2016-08/08/content_5098072.htm.
State Council. ��13th Five-Year�� National Science and Technology Innovation Plan[EB/OL]. [2016��08��08].http://www.gov.cn/zhengce/content/2016-08/08/content_5098072.htm.
[2] ������, ������. �����Ŵ��㷨���г����ܿ����о�[J]. ϵͳ����ѧ��, 2007, 19(2): 384-387.
LI Yusheng, HOU Zhongsheng. Study on energy-saving control for train based on genetic algorithm[J]. Journal of System Simulation. 2007, 19(2): 384-387.
[3] ����, ����, ����, ��. �г����ܲ����Ż���ⷽ������[J]. ����ѧ��, 2014, 36(4): 14-20.
XUN Jing, YANG Xin, NING Bin, et al. Survey on trajectory optimization for train operation[J]. Journal of the China Railway Society, 2014, 36(4): 14-20.
[4] ICHIKAWA K. Application of optimization theory for bounded state variable problems to the operation of train[J]. JSME International Journal, 1968, 11(47): 857-865.
[5] MILROY, IAN P. Aspects of automatic train control[D]. Leicestershire: Loughborough University. Department of Electronic and Electrical Engineering, 1980: 137-138.
[6] ASNIS I A, DMITRUK A V, OSMOLOVSKII N P. Solution of the problem of the energetically optimal control of the motion of a train by the maximum principle[J]. USSR Computational Mathematics & Mathematical Physics, 1985, 25(6): 37-44.
[7] HOWLETT P. An optimal strategy for the control of a train[J]. The Journal of the Australian Mathematical Society Series B: Applied Mathematics, 1990, 31(4): 454-471.
[8] HOWLETT P. Optimal strategies for the control of a train[J]. Automatica, 1996, 32(4): 519-532.
[9] HOWLETT P G, CHENG J. Optimal driving strategies for a train on a track with continuously varying gradient[J]. The Journal of the Australian Mathematical Society Series B: Applied Mathematics, 1997, 38(3): 388-410.
[10] ��˧. �ǹ��г�����ͼ���ٶ�����һ�廯���ܷ���[D]. ����: ������ͨ��ѧ������Ϣ����ѧԺ, 2016: 31-54.
SU Shuai. An energy-efficient approach by integrating the train timetable and speed trajectory in urban rail[D]. Beijing: Beijing Jiaotong University. School of Electronic and Information Engineering, 2016: 31-54.
[11] ��. �е��ٴŸ��г������ٶ����ߵļ���[D]. �ɶ�: ���Ͻ�ͨ��ѧ��������ѧԺ, 2012: 37-52.
CUI Jie. Calculation of operating speed curve on medium and low speed maglev train[D]. Chengdu: Southwest Jiaotong University. School of Electrical Engineering, 2012: 37-52.
[12] ����. �Ÿ��г�����ƽ̨��Ƽ��˿��㷨�о�[D]. ����: �㽭��ѧ��������ѧԺ, 2008: 50-86.
YANG Ke. Research on design and operation control algorithm of maglev train simulation platform[D]. Hangzhou: Zhejiang University. College of Electrical Engineering, 2008: 50-86.
[13] ���. ���ٴŸ��г������ٶ���������ٿ����о�[D]. ����: ������ͨ��ѧ������Ϣ����ѧԺ, 2007: 43-83.
YANG Guang. Study on high speed maglev train optimum speed curve and its tracking control[D]. Beijing: Beijing Jiaotong University. School of Electronic and Information Engineering, 2007: 43-83.
[14] YANG Guang. Energy-saving operation control strategy of high-speed Maglev train[C]//2008 Chinese Control and Decision Conference. Piscataway, NJ: IEEE, 2008: 2250-2253.
[15] �彨��. �Ÿ��г����п���ϵͳ������ʼ�����ͣ���������о�[D]. ����: �㽭��ѧ��������ѧԺ, 2006: 43-62.
BIAN Jianguang. Research on the related properties of maglev train operation control system and characteristics of auxiliary parking area[D]. Hangzhou: Zhejiang University. College of Electrical Engineering, 2006: 43-62.
[16] ����ӥ, ����, ����Խ,��. �и��ٴ������ܡ��ء���һ�廯�Ż����[C]//��ʮ�����й����ܽ�ͨ��������ļ�. ������2017: 292-298.
LAI Qingying, LIU Jun, XU Xinyue, et al. Integrated optimization framework of the middle-to-high speed maglev on timetable, coast control, electricity[C]//China Intelligent Transportation Annual Conference. Beijing, 2017: 292-298.
[17] ����, ������. ���ٴ�������ͨ��ά�ٶȷ����������㷨�о�[J]. �й�������ѧ, 2002, 23(4): 106-110.
LIU Jin, WU Wenqi. Research on two-dimensional speed protection curve and algorithm of high speed maglev traffic[J]. China Railway Science, 2002, 23(4): 106-110.
[18] ����, ������, ����. �Ÿ��г����п���ϵͳ��ά�ٶȷ������߷���[J]. ͬ�ô�ѧѧ��(��Ȼ��ѧ��), 2004, 32(3): 397-400.
JIANG Ya, WU Wenqi, LIU Jin. Simulation of high-speed maglev train 2-D speed protection curve[J]. Journal of Tongji University(Science and Technology), 2004, 32(3): 397-400.
[19] DONG Hairong, ZHANG Lingying, CHEN Yao, et al. Multi-objective train trajectory design based on dynamic programming[C]// Proceedings of the 33rd Chinese Control Conference. Piscataway, NJ: IEEE, 2014: 9060-9065.
(�༭ �Կ�)
�ո����ڣ� 2018 -07 -20; �����ڣ� 2018 -10 -16
������Ŀ(Foundation item)�������ص��з��ƻ���Ŀ(2016YFB1200601)�������У��������ҵ���ר���ʽ�������Ŀ(2018YJS094)��������Ȼ��ѧ����������Ŀ(71871012)(Project(2016YFB1200601) supported by the National Key R&D Program of China; Project(2018YJS094) supported by the Fundamental Research Funds for the Central Universities; Project(71871012) supported by the National Natural Science Foundation of China)
ͨ�����ߣ���������ʿ�����ڣ����¹����ͨ��Ӫ�����뼼���о���E-mail��jliu@bjtu.edu.cn
ժҪ:�ڷ������ٴŸ��г�����ѧģ�ͺͽ������й���ת�����еĻ����ϣ����һ������������·����Ϊ���ݻ��ֳ�����Ȼ�����ض���������˫���ٶȷ������ߵ��ٽ��Ϊ���ݽ�һ��ϸ������Ľ�ģ˼�룬������������Ŀ������ʱ��Լ���µĶ������г��ٶ����߽����Ż�ģ�ͣ�������һ�ֻ��ڲ�ͬ���й���ת��������˼·�Լ��������г������ٶ����ߵ�Pareto�Ż��������о�����������������г��ٶ����߽����Ż������Աȣ������Ż�������ԴŸ��г����е������Ժ��Ż�Ч�����á�
[2] ������, ������. �����Ŵ��㷨���г����ܿ����о�[J]. ϵͳ����ѧ��, 2007, 19(2): 384-387.
[3] ����, ����, ����, ��. �г����ܲ����Ż���ⷽ������[J]. ����ѧ��, 2014, 36(4): 14-20.
[8] HOWLETT P. Optimal strategies for the control of a train[J]. Automatica, 1996, 32(4): 519-532.
[10] ��˧. �ǹ��г�����ͼ���ٶ�����һ�廯���ܷ���[D]. ����: ������ͨ��ѧ������Ϣ����ѧԺ, 2016: 31-54.
[11] ��. �е��ٴŸ��г������ٶ����ߵļ���[D]. �ɶ�: ���Ͻ�ͨ��ѧ��������ѧԺ, 2012: 37-52.
[12] ����. �Ÿ��г�����ƽ̨��Ƽ��˿��㷨�о�[D]. ����: �㽭��ѧ��������ѧԺ, 2008: 50-86.
[13] ���. ���ٴŸ��г������ٶ���������ٿ����о�[D]. ����: ������ͨ��ѧ������Ϣ����ѧԺ, 2007: 43-83.
[15] �彨��. �Ÿ��г����п���ϵͳ������ʼ�����ͣ���������о�[D]. ����: �㽭��ѧ��������ѧԺ, 2006: 43-62.
[17] ����, ������. ���ٴ�������ͨ��ά�ٶȷ����������㷨�о�[J]. �й�������ѧ, 2002, 23(4): 106-110.
