
ģ����ṹ�綯������IPM����
ͬ���綯��ֱ��ת�ؿ���
������1, 2��������2
(1. ����������ѧ ���繤��ѧԺ������ ������650051��
2. ����������ѧ ��Ϣ�������Զ���ѧԺ������ ������650093)
ժ Ҫ��
�綯���ʺϵ綯����ǣ��������Ϊ�����㳵����������ϵͳ�Ķ�����̬���ܺ�³���ԣ����һ��ģ����ģ��ṹֱ��ת�ؿ��Ʋ��ԡ��÷����˷��˴�ͳֱ��ת�ؿ��ƴ���ת���������ٶȳ�����������������IJ��㣬�����˻�ģ��ṹ���ƵIJ������⡣������������÷������п����Ժ���Ч�ԡ�
�ؼ��ʣ�
�綯��������������ʽ����ͬ���綯����ֱ��ת�ؿ�����ģ����ṹ������
��ͼ����ţ�TP276 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0949-04
Fuzzy variable structure and direct torque controller for IPM permanent magnet synchronous motors used in
electrical vehicle
CHE Guo-lin1, 2, ZHANG Yun-sheng2
(1. Faculty of Mechanical and Electrical Engineering, Kunming University of Science and Technology,
Kunming 650051, China;
2. Faculty of Information Engineering and Automation, Kunming University of Science and Technology,
Kunming 650093, China)
Abstract: In order to meet the vehicle drive control system dynamic and steady state performance and robustness, a fuzzy sliding mode variable structure and direct torque control strategy was designed to interior permanent magnet (IPM ) synchronous motor which fits the electrical vehicle driving. This method overcomes the existence of conventional direct torque control torque ripple, speed overshoot and poor anti-disturbance ability, and weakens the serious chatting which exists in sliding mode variable structure control. The simulation results show the feasibility and effectiveness.
Key words: electrical vehicle driving; IPM permanent magnet synchronous motor; direct torque control; fuzzy variable structure control
��������Դ�����ر��Ǵ��綯�����ķ�չ����������ϵͳ������������綯�����ĺ����ǵ綯����������ϵͳ�����õ綯��������������Ҫ���ǣ��Ͽ��������ٷ�Χ������ת�ش����������µ�����ǿ�Ĺ������������ٵĶ�̬��Ӧ�����õļ������ܣ���Ӧ�綯����Ƶ�����ر仯������������������и�Ч�ʡ��߹����ܶȺ�ת���ܶȡ�
Ŀǰ���õ綯����������ˢֱ���綯�����첽�綯�������ش���綯��������ͬ���綯����ϵͳ����������ͬ���綯�����и�Ч�ʡ��߹����ܶȡ���ת���ܶȡ����õ�ת��ƽ���ԡ����С�����Ե͡���Ӧ����ص㣬�ڵ綯������Ӧ�ù㷺���綯������������ͬ���綯��������ʽ(IPM)Ϊ��[1]��
ֱ��ת�ؿ���(DTC)��һ�����ͽ�����Ƶ����ԭ������ͳDTC���ñ�������(PI)������Ϊ�ٶȵ��������綯��ת�ٻ�������������ת�غʹ��������ϴ綯�������ı仯��ת�ٹ��Ƶ�ƫ���ϵͳ��̬����Ӱ��ϴ�ϵͳ��³���Բ���ݵ綯���������ص㣬��������ϵͳҪ��������õĶ���̬���ܺ�³���ԡ���ṹ����ϵͳ�绬ģ�������������Ŀ������ܺ�����ʵ�ֵ��ŵ㣬�ڽ���ֱ������ϵͳ���ܵ�����[2]�������ṹ����ϵͳ�������ֲ����������������һ��ģ����ṹ���Ʒ�������������IPM����ͬ���綯��ֱ��ת�ؿ��ƣ��Ը�����ģ����ṹDTC���з��棬�˷�PI����ת�ٳ�����ת���������ȱ�㣬��ǿ����ϵͳ³���Ժ���̬���ԡ�
1 IPMֱ��ת�ؿ���
1.1 IPM����ͬ���綯����ѧģ��
����ͬ���綯������ת��������ķ��÷�ʽ����Ϊ����ʽ(SPM)������ʽ(IPM)���֡�SPM���칤�ռ��ɱ��ͣ�Ӧ�ýϹ㷺�������ٷ�Χ�Ƚ�խ���������ز�����IPM����ͬ���綯��������-����綯����IPM������ת�صĻ����ϵ��Ӵ���ת�أ�����ת����������ߵ綯���Ĺ������������ܶȣ��������ŵ��٣�����綯���㹦�����з�Χ���������������綯����չ����
IPM�綯����d��q����ϵ�µ���ѧģ�������� ��[3]��
��ѹ���̣�
![]() (1)
(1)
�������̣�
![]() (2)
(2)
���ת�ط��̣�
![]() (3)
(3)
�˶����̣�
![]() (4)
(4)
���У�ud��uq��id��iq��Ld��Lq����d�ͦ�q�ֱ�Ϊd���q��Ķ��ӵ�ѹ�����ӵ�������С����Ӵ�����������fΪ������ת�Ӵ�����RaΪ���ӵ��裻pΪ����������Ϊ���ת�ӽ��ٶȣ�Te��Tl�ֱ�Ϊ���ת�غ���ת�أ�JΪ�綯��ת��������
1.2 IPMֱ��ת�ؿ���
ֱ��ת�ؿ���(DTC)�Ǽ�ʸ������֮���һ�ָ����ܽ����綯�����Ʒ�������ʡȥ�������綯����ֱ���綯������Ч��ת��ʱ���ӵĿռ�����任�����ö��Ӵ�������ʵ���ڶ�������ϵ�Ե綯��������ת��ֱ�ӹ۲졢���ƣ���ⶨ�ӵ�����Թ۲ⶨ�Ӵ��������ʸ������������ת�Ӳ�����Ӱ�졣DTC��������ת�ع۲�ֵ�����ֵ֮��ͻ����������ڻ�ô�����ת�ؿ����źţ��ۺ϶��Ӵ����ĵ�ǰλ��ѡȡ���ʵĵ�ѹ�ռ�ʸ�����Ե綯��ת��ֱ�ӿ��ƣ���߶�̬���ܡ�
DTC�Ѿ����첽�綯���ϳɹ�Ӧ�ã�������Ҳ��Ӧ��������ͬ���綯��[4]��DTC������ͬ���綯�����첽�綯��Ӧ���еIJ�����Ҫ����Ϊ���ѹʸ����ʹ�á��첽�綯��DTC�У����ѹʸ������Ч���ƶ��Ӵ������˶�������ת��ʵʱ�仯���õ����ٶ�̬��Ӧ������ͬ���綯��DTC��ʹ�����ѹʸ�����Ӵ�������λ�ò��䣬�����Ӵ�����ת�����Ŵų�������Ȼ����ת�أ�������Ч��Сת�أ�����ʹ�÷���ѹʸ����Сת�ء����÷���ѹʸ��������ͬ���綯��ת����Ӧ�죬Ҳʹ�ô�����ת�ر仯���ң�Ӱ����̬���ܡ������̬��Ӧ��������̬���ܵ�ì��������ͬ���綯��DTC��Ҫ��������⡣
��IPM���ת�ط���ʽ(3)�У�
![]() (5)
(5)
![]() (6)
(6)
��ʽ(4)��(5)����ʽ(3)�����õ���
![]() (7)
(7)
ʽ�У���sΪ���Ӵ�������sfΪ���Ӵ�����ת�Ӵ����ļнǣ���ת�ؽǣ����ת�ذ������Ӵų������Ŵų���������ĵ��ת�غ�d��q���·���Գ�����Ĵ���ת�ء�ʽ(7)���������Ӵ����㶨������ת����ת�ؽǵ����ҳ����ȡ����ֶ��Ӵ����㶨���ı䶨�Ӵ�����ת�ٶȺͷ������˲ʱ����ת�ؽǣ�ʵ��ת�صĶ�̬���ƣ���IPMֱ��ת�ؿ��ƵĻ���˼�롣
DTCϵͳ���������8������״̬���õ�8�ֵ�ѹ�ռ�ʸ��������2�����ѹʸ��λ�ڿռ�ʸ��ƽ�����ģ�����6 �������ѹʸ���ڿռ�ʸ��ƽ���и������60��ƽ���ֲ�������6����������
���Ӵ������Ա�ʾ�ɵ�ѹ�ռ�ʸ��u�Ļ��֣�
![]() (8)
(8)
ʽ�У���sΪ���Ӵ�����uΪ��ѹ�ռ�ʸ����isΪ���ӵ�����RΪ���ӵ��衣����ʸ���˶������������ѹʸ���ķ���һ�£�ѡ���ʵ��ĵ�ѹ�ռ�ʸ�����Ե��ڶ��Ӵ����ķ�ֵ���˶��������ٶȣ�����ת�ؽ�ʵ��ת��ֱ�ӿ��ơ�
2 ģ����ṹDTC����
��ṹ��ģ�������ǻ�����ƽ��Ŀ��ƣ������˼�������һԤ���Ļ�ģ�棬Ȼ������һ�������״̬�켣ͨ���������������������趨�Ļ�ģ�棬ͬʱ��֤ϵͳ�ڻ�ģ���ϵ��˶��ǽ����ȶ���[5]��ϵͳ���뻬̬��ϵͳ�������Ŷ��仯��ӳ�����������к�ǿ��³���ԣ��Ҵ��ڲ���ṹ���������������������������������ģ�����Ʒ����������ϣ�����ģ����ṹ����ϵͳ[6]����ͳIPM����ͬ���綯��DTC�������ٶȻ�ʹ��PI������������������DTC�����ϣ���ģ����ṹ����������DTC�е�PI�ٶȵ���������֤����IPM����������Ӧ��ͬʱ����ȶ��ԣ�ϵͳ��ͼ��ͼ1��ʾ��
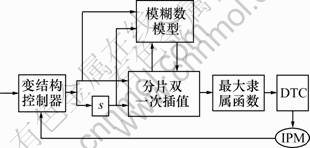
ͼ1 ģ����ṹIPM����ͬ���綯��DTCϵͳ��ͼ
Fig.1 Fuzzy variable structure IPM DTC system diagram
ȡ����ϵͳ��״̬����Ϊ
![]() (9)
(9)
���У���rΪ������ת�ӽ�ת�٣���Ϊʵ�ʵ�ת�ӽ��ٶȣ����ٶȼ��װ�õõ���
Ϊ��ʹ��ͳDTC���������شﵽ��̬��ѡ��һ��ģ�棬��
![]() ������������ ����(10)
������������ ����(10)
ģ������������������S��![]() ��S�����༣��ͻ�ģ��ľ��룻
��S�����༣��ͻ�ģ��ľ��룻![]() ���ʾ�༣��������ģ����ٶȡ������ΪU��S��
���ʾ�༣��������ģ����ٶȡ������ΪU��S��![]() ��U������ȡ[-3��+3]����S��
��U������ȡ[-3��+3]����S��![]() ��U�����Ա����ֱ�Ϊ
��U�����Ա����ֱ�Ϊ![]() ��
��![]() ��
��![]() �����Ӧ��ģ���Ӽ�ȡ{NB��NM��NS��Z��PS��PM��PB}={-3��-2��-1��0��+1��+2��+3}������S��
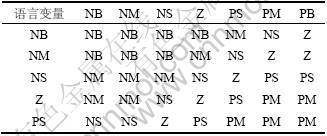
�����Ӧ��ģ���Ӽ�ȡ{NB��NM��NS��Z��PS��PM��PB}={-3��-2��-1��0��+1��+2��+3}������S��![]() ���������壬���ģ�����ƹ������ģ�����ƹ���������Ա���ȡֵģ������Ҳ����ģ����ģ�ͣ����1��ʾ����������һ��S��
���������壬���ģ�����ƹ������ģ�����ƹ���������Ա���ȡֵģ������Ҳ����ģ����ģ�ͣ����1��ʾ����������һ��S��![]() ����
����![]() ��
��![]() �����þ������Ϸ�Ƭ˫һ�β�ֵ������ģ����ģ�����߲�ֵ�õ�
�����þ������Ϸ�Ƭ˫һ�β�ֵ������ģ����ģ�����߲�ֵ�õ�![]() ���÷�����xyƽ��ijһ����ֳ����ɾ��Σ�ѡ������һ��������֪�������ĸ������ϵĺ��������ֵ������
���÷�����xyƽ��ijһ����ֳ����ɾ��Σ�ѡ������һ��������֪�������ĸ������ϵĺ��������ֵ������
![]() (11)
(11)
ʽ(11)Ϊ˫һ��ʽ�����õ���ֵ������������![]() Ϊ
Ϊ![]() ��UmΪϵͳ�����������������������������о��õ������仯��U��
��UmΪϵͳ�����������������������������о��õ������仯��U��
��1 ģ�����ƹ����
Table 1 Fuzzy control rules table
3 �����о�
Ϊ�˶Ա�IPM����ͬ���綯���봫ͳDTC��ģ����ṹDTC�Ŀ���Ч�������� Matlab/Simunink ���з������顣�������Ϊ�����ѹ220 V�������3 A�������400 W���ת��700 r/min���ת��0.64 N��m������ÿ�����1.51 ����d ���� 0.004 8 H��q ����0.009 6 H��ת�����Ŵ�ͨ0.107 3 Wb��������2��ת������0.244��10-3 kg��m2��ϵͳ����ͼ1��ʾ��ģ����ṹDTC���Ʒ��������ٶȵ���������PI���Ƶ�һ��ͬ���綯��DTC�Ƚϡ�
������������ͼ2��ʾ����ͼ2���Կ���������ģ����ṹDTC���Ƶ�IPM����ͬ�����ת���������ʿ죬�ﵽ�ȶ�ֵʱ�������ٶȻ�����PI���Ƶ�DTC��IPM����ͬ���綯��ת�ٶ�̬��Ӧʱ���Գ���ת���г�����

ͼ2 ���ת�ٷ�����
Fig.2 Speed of motor simulation results
4 ����
(1) ��Ե綯���������õ綯���������ϵͳҪ�Ե綯������IPM����ͬ���綯����ѧģ�ͺʹ�ͳDTC���Ʒ�������������
(2) ���IPM����ͬ���綯��ֱ��ת�ؿ���ϵͳ����ģ����ṹ���������洫ͳ��PI��������������ԭ��DTC�ٶȳ�����������̬���ܡ�
(3) ģ����ṹDTC�˷��˴�ͳDTCת�����������������ϴ��ȱ�ݣ������˴�ͳDTC��̬��Ӧ����ŵ㣬��Ч������˳���IPM����ϵͳ���������ܡ�ģ����ṹDTC��ϵͳ�����仯���ⲿ���ž��н�ǿ��³���ԡ�����ʵ����о�Ϊ��һ������Ӧ�õ춨�����ۻ�����
�ο����ף�
[1] ��ӱ. �綯����������ͬ���綯������[J]. ���, 2005, 38(3): 84-86.
DAI Ying. Permanent magnet synchronous motor used in electrical vehicles: An overview [J]. Micromotors, 2005, 38(3): 84-86.
[2] Li J, Yang G, Wang H. Implementation of direct torque control scheme for induction machines with structure controllers[J]. Tsinghua Science and Technology, 2005, 10(5): 593-597.
[3] ����Զ. �ִ����ŵ綯�����������[M]. ����: ��е��ҵ������, 1997.
TANG Ren-yuan. Theory and design of modern permanent magnet motor [M]. Beijing: China Machine Press, 1997.
[4] Zhong L, Rahman M F, Hu W Y, et a1. A direct torque control for permanent magenent synchronous motor drives[J]. IEEE Transactions on Energy Conversion, 1999, 3(14): 637-642.
[5] ͯ����, ����, ����, ��. �������������ɵ�����ͬ���綯����ģ��ṹ����[J]. �й���������ѧ��, 2008, 28(21): 102-106.
TONG Ke-wen, ZHANG Xing, ZHANG Yu, et al. Permanent magnet synchronous machine based on a novel approaching law sliding mode variable structure control [J]. Proceedings of the CSEE, 2008, 28(21): 102-106.
[6] ������, ������. ģ������������Ӧ��[M]. ����: ������ҵ��ѧ������, 2004.
ZHANG wei-guo, YANG Xiang-zhong. Theory and application of fuzzy control [M]. Xi��an: Northwestern Polytechnical University Press, 2004.
(�༭ ����Ⱥ)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ������ʡ��Ȼ��ѧ�����о���Ŀ(2009CD041)
ͨ�����ߣ�������(1975-)���У������ˣ���ʿ�о�������ʦ�������˶����ơ����ܿ��Ƽ�Ӧ���о����绰��13033376426; E-mail: che_guolin@163.com
ժҪ������ʽ����ͬ���綯���ʺϵ綯����ǣ��������Ϊ�����㳵����������ϵͳ�Ķ�����̬���ܺ�³���ԣ����һ��ģ����ģ��ṹֱ��ת�ؿ��Ʋ��ԡ��÷����˷��˴�ͳֱ��ת�ؿ��ƴ���ת���������ٶȳ�����������������IJ��㣬�����˻�ģ��ṹ���ƵIJ������⡣������������÷������п����Ժ���Ч�ԡ�
