
�������������Ĺ�ǰ�˺��ͳ����������
�������ż�ҵ�������ƣ�������
(���Ͻ�ͨ��ѧ ǣ�����������ص�ʵ���ң��Ĵ� �ɶ���610031)
ժ Ҫ��
�����ڳ�����Ϣ�Ĺ�ǰ�˺��ͳ�������ϵͳ���о����������µ��Զ��������������⡣�ٶ�ÿ�����泵��ͨ������������ǰ�����ڳ�������ͷ������״̬��Ϣ��������Ϣ�ڶ��������������´������������ڳ���������������ѧ���ģ�ͣ����ù̶����������ԣ�Ӧ������Lyapunov���������ó��ķ����Թ�����ϵͳȺָ���ȶ����оݣ�����������Ϊ��ȷ��ϵͳ״̬���������������ź�Ӱ���µĻ�ģ�����ɣ���������㳵��Ⱥ�ȶ��ԵĿ�������������������������Ƶij�����������������������������Ӱ���������Ч�������벻����������������ƵĿ�������ȣ����������ܹ�������߳����������������ٶȡ�
�ؼ��ʣ�
��������ϵͳ����ģ����������Lyapunov���������������
��ͼ����ţ�TP273 ���ױ�־�룺A ���±�ţ�1672-7207(2014)11-4068-07
Vehicle following control with quantization feedback by using front and back information
WANG Peng, ZHANG Jiye, SONG Pengyun, CHEN Yanqiu
(State Key Laboratory of Traction Power, Southwest Jiaotong University, Chengdu 610031, China)
Abstract: For a class of vehicle following system using front and back information, the problem of longitudinal following control of vehicles in platoon with quantization feedback was studied. Every following vehicle in platoon was supposed to get the information with logarithmic quantization errors of the leading vehicle, the predecessor and the follower via wireless network. Based on the nonlinear longitudinal dynamics coupled model of vehicles in platoon, the quantization errors were conducted as uncertain system states and an exponential string stability criterion of a nonlinear interconnected complex system solved by a method applying vector Lyapunov function was used. A sliding mode control law with quantization feedback was designed by using constant spacing safety policy. And control parameters which ensure string stability of this system were given. The simulation result shows that the compensation generated by this controller is effective for quantization errors. And compared with the controller when quantization errors are not taken into consideration, this controller obtains a higher convergence rate of vehicle following errors.
Key words: vehicle following system; sliding mode control; vector Lyapunov function; quantization error
�����������ż����ͨ�������缼���ķ�չ�����紫���źŶԿ���ϵͳ��Ӱ��������ѧ���ǵĹ㷺��ע[1]�����ڷ������������ƣ�ÿ��������Ҫͨ�������ڵ���������������״̬��Ϣ[2]���о��������ضԳ��������������Ӱ�����б�Ҫ�ġ�������������紫���һ����Ҫ���ء�����[3]���Ƚ���������Ϊϵͳ״̬�IJ�ȷ���ԣ���Ծ�����������������ϵͳ���������Ծ���ʽ���������³��������������[4]�������÷������뵽���紫�价���µij�������ϵͳ��������˱�����/ �����������Ǹ÷�����һ�ּ���ʽ����������Ʒ��������������϶�ʱ�����ľ���ά���ϸߣ��������ϴ���ˣ��ڴ˻����ϣ�����[5-6]Ӧ�ð���ԭ���Ը���������ϵͳ���н���Խ������ϵͳ����˷ֲ�ʽ�����ܿ���������ͨ������������������ת����ԭ���ϵͳ�������˼�����������Ӧ�á�Ȼ������[4-6]��Ҫ��õ����Ի��ij���ģ�ͣ������������ĸ����Լ�·����Ӱ�쳣����Ҫͨ��������ģ������������������[7-9]�����˳�������ϵͳ�ķ�����ģ�ͣ������ü�ȨLyapunov�������ʹ��ݺ������о���ϵͳ��Ⱥ�ȶ��ԡ����Ǹ÷���ֻ�ʺ�������ϵĹ���ϵͳ������[10-11]����������Lyapunov�����������˳�������ϵͳ��Ⱥ�ȶ��ԣ��������������滬ģ��������ȷ��ϵͳ�ȶ��Ŀ�������������������[7]�õ��ϴ���ơ�����[12-13]��һ��������������غ��������ض�Ⱥ�ȶ��Ե�Ӱ�죬���о���Ӧ�ij����Զ����滬ģ�����ɡ���Щϵͳģ�;�ֻ������ǰ����������Ϣ����û�п��Ǻ�������Ϣ�����ڳ�������趨���ͨ����С��Ϊ�˽�һ��ȷ�����ӵİ�ȫ��ʻ��ÿ�����泵��Ӧͬʱ�����ǰ������״̬��Ϣ����ˣ�����[14-15]������[10]�Ļ������о���һ���ǰ������Ϣ�Ĺ�ǰ�˺��ͳ�������ϵͳ������������Ӧ�ĸ�������ɣ���û�п��������������ضԿ���ϵͳ��Ӱ�졣��ˣ�����������Թ�ǰ�˺�ij�������ϵͳģ�ͣ��о��˾�����������������������������Ʒ���������С�����Ʋ�����������Ⱥ�ȶ���������
�����������Ǹ÷�����һ�ּ���ʽ����������Ʒ��������������϶�ʱ�����ľ���ά���ϸߣ��������ϴ���ˣ��ڴ˻����ϣ�����[5-6]Ӧ�ð���ԭ���Ը���������ϵͳ���н���Խ������ϵͳ����˷ֲ�ʽ�����ܿ���������ͨ������������������ת����ԭ���ϵͳ�������˼�����������Ӧ�á�Ȼ������[4-6]��Ҫ��õ����Ի��ij���ģ�ͣ������������ĸ����Լ�·����Ӱ�쳣����Ҫͨ��������ģ������������������[7-9]�����˳�������ϵͳ�ķ�����ģ�ͣ������ü�ȨLyapunov�������ʹ��ݺ������о���ϵͳ��Ⱥ�ȶ��ԡ����Ǹ÷���ֻ�ʺ�������ϵĹ���ϵͳ������[10-11]����������Lyapunov�����������˳�������ϵͳ��Ⱥ�ȶ��ԣ��������������滬ģ��������ȷ��ϵͳ�ȶ��Ŀ�������������������[7]�õ��ϴ���ơ�����[12-13]��һ��������������غ��������ض�Ⱥ�ȶ��Ե�Ӱ�죬���о���Ӧ�ij����Զ����滬ģ�����ɡ���Щϵͳģ�;�ֻ������ǰ����������Ϣ����û�п��Ǻ�������Ϣ�����ڳ�������趨���ͨ����С��Ϊ�˽�һ��ȷ�����ӵİ�ȫ��ʻ��ÿ�����泵��Ӧͬʱ�����ǰ������״̬��Ϣ����ˣ�����[14-15]������[10]�Ļ������о���һ���ǰ������Ϣ�Ĺ�ǰ�˺��ͳ�������ϵͳ������������Ӧ�ĸ�������ɣ���û�п��������������ضԿ���ϵͳ��Ӱ�졣��ˣ�����������Թ�ǰ�˺�ij�������ϵͳģ�ͣ��о��˾�����������������������������Ʒ���������С�����Ʋ�����������Ⱥ�ȶ���������
1 ϵͳ��ģ����������
1.1 ϵͳģ��
����ͼ1��ʾ�Զ�����·ϵͳ�ij��������ӣ��ñ�Ӳ��ù̶����������ԣ�ͼ��L i(i=1, 2, ��)��ʾ��i�������i-1����֮���趨�Ĺ̶��ռ�����xi��vi��ai��Mi(i=0, 1, 2, ��)�ֱ��ʾ��i������λ�ơ��ٶȡ����ٶȺ�����������i=0��ʾ��ͷ������

ͼ1 ����������
Fig. 1 Longitudinal vehicles in platoon
���峵���е�i�������i-1�����ĸ������
 (1)
(1)
���У�t��ʾʱ�䡣��i��������ͷ����֮��ĸ������Ϊ
 (2)
(2)
���ݳ���������ѧģ��[2]����i�����泵����������ѧ��Ϊ�������·������ַ��̱�ʾ
 (3)
(3)
���У� ��ʾ�����������룻
��ʾ�����������룻 ��ʾ��������(
��ʾ��������( Ϊ��������ϵ��)��
Ϊ��������ϵ��)�� ��ʾ·��Գ�����������
��ʾ·��Գ�����������
1.2 ��������
1.2.1 ������Ϣ�����ṹ
���Ŀ�������������������ڳ�����Ϣ�����е�Ӱ�죬������Ϣ�����ṹ��ͼ2��ʾ��
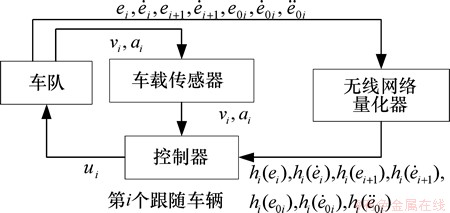
ͼ2 ����״̬��Ϣ����ṹ
Fig. 2 Information structure of states of vehicles in platoon
��ͼ2���Կ�������i�����泵��ͨ�����ش�������������״̬��Ϣvi��ai����ͨ���������������i-1����֮��ĸ������ ���ٶ����
���ٶ���� �����
����� ����֮��ĸ������
����֮��ĸ������ ���ٶ����
���ٶ���� ������ͷ����֮��ĸ������
������ͷ����֮��ĸ������ ���ٶ����
���ٶ���� �ͼ��ٶ����
�ͼ��ٶ���� ��������������Ӱ�죬���������紫�����Ϣ����������������������������ͨ�����Ϸ�����Ϣ�������i-1�����ľ��룬�����̶ֹ����
��������������Ӱ�죬���������紫�����Ϣ����������������������������ͨ�����Ϸ�����Ϣ�������i-1�����ľ��룬�����̶ֹ���� ��
��
1.2.2 ����ͨ��Լ��
���ڳ����ڵ�i�����泵������������[3]  , ÿ��
, ÿ�� ������������Ϊ
������������Ϊ
 (4)
(4)
������������ÿ������ֵyӳ�䵽Wi��һ��Ԫ�أ���ӳ���ϵ����Ϊ
 (5)
(5)
���� ��
��
��������[4]�Ĵ�����ʽ�����������Ϊϵͳ״̬�IJ�ȷ���ԣ��ɵ����¹�ϵ
 (6)
(6)
 (7)
(7)
��ˣ���������������Ϣ�����Ӱ�죬�����ɽ�����������ʽ

 ,
,
 (8)
(8)
1.2.3 ������Ŀ��
����ÿ�����泵�������ݷ�������ͷ����������ǰ������״̬��Ϣ��Ѱ���ʵ��Ŀ�������(8)����������Ҫ��
1) ���������ȶ��ԣ�������ÿ�����泵���ĸ������ ��������0��
��������0��
2) Ⱥ�ȶ��ԣ����� ������
������ ��ʹ��
��ʹ�� (
( ��ʾŷ�Ϸ�����
��ʾŷ�Ϸ����� ��ʾ
��ʾ )��
)��
2 ��������������
�����Զ�����������ϵͳ��������ĸ�������ͨ��������ʽ�Ĺ���ϵͳ����������
 (9)
(9)
���� ��
�� ��
�� ����
���� ���ٶ�ϵͳ(9)�������Ĵ����Ժ�Ψһ��������
���ٶ�ϵͳ(9)�������Ĵ����Ժ�Ψһ��������
����1 ϵͳ(9)��ԭ�� ����Ⱥ�ȶ��ģ�������ڸ����������ڳ�����ʹ��
����Ⱥ�ȶ��ģ�������ڸ����������ڳ�����ʹ�� ������һ����
������һ���� ��
�� ��ָ����ʽ����0����ϵͳ(9)�������Ⱥָ���ȶ��ġ�
��ָ����ʽ����0����ϵͳ(9)�������Ⱥָ���ȶ��ġ�
�����������Lyapunov���������õ��Ĺ�����ϵͳ(9)���ȶ�����������Ϊ��������������ƵĻ�����
����1[14] ����ϵͳ(9)���������������������������Ⱥָ���ȶ��ġ�
(i) 
 ��
��
 ��
��
(ii) ����ϵͳ
 ������һ��Lyapunov����
������һ��Lyapunov���� ������
������ ��
�� ��
�� ��
�� ��ʹ��
��ʹ��
 ��
��
 ,
,  ��
��
(iii)  ��
��
2.1 ��ģ������
���û�ģ���Ʒ������ϵͳ�������������л�����
 (10)
(10)
���� ,
,  ,
,  ��
�� �Ǵ�����������
�Ǵ����������� ������ʽ(3)�����
������ʽ(3)�����


 (11)
(11)
�� ���������ŵ������е��������ɵõ�Ч����
���������ŵ������е��������ɵõ�Ч����

 (12)
(12)
Ϊ��ʹϵͳ��״̬���㻬��ģ̬�Ŀɴ�������ȡ�����Կ�����
 (13)
(13)
 (14)
(14)
 (15)
(15)
 (16)
(16)
���У�signΪ���ź����� Ϊ��ѡ���Ʋ�������ʽ(12)��(13)�ɵõ�i�����泵���Ŀ�����Ϊ
Ϊ��ѡ���Ʋ�������ʽ(12)��(13)�ɵõ�i�����泵���Ŀ�����Ϊ
 (17)
(17)
2.2 �ȶ��Է���
2.2.1 ����ģ̬�Ŀɴ���
����֤����������ϵͳ(3)�ڿ�����(17)�����µĻ���ģ̬�����ɴȡLyapunov����
 ��
�� (18)
(18)
����

 (19)
(19)
��ʽ(18)��ʽ(10)��ʱ����������ʽ(17)��(19)��
 (20)
(20)
����ʽ(6)����ʽ(20)��

 ��
�� (21)
(21)
�ٿ��Dz���ʽ(7)��������ʽ(14)��(15)����ʽ(21)��
 ��
�� ��
�� (22)
(22)
��ˣ�ϵͳ�Ļ���ģ̬�ǽ����ɴ�ġ�
2.2.2 ��ģ�˶����ȶ���
ͨ��ȷ�����Ʋ���q1��q2��q3��q4��ʹ��ʱ�� ����ϵʽ(10)���ɻ�ģ��
����ϵʽ(10)���ɻ�ģ�� ��i=1, 2, ���ɵ�
��i=1, 2, ���ɵ�


 (23)
(23)
��ˣ���ʽ(23)���Ļ�ģ�˶�����Ϊ
 (24)
(24)
ȡ ��
��
�� ����ʽ(24)�ɵ�
����ʽ(24)�ɵ�
 (25)
(25)
�ɼ���ʽ(25)��ʽ(9)����ʽ��һ�µġ�
����1 ����ϵͳ(25)��������
 (26)
(26)
��ϵͳ(25)�������Ⱥָ���ȶ��ġ�
֤�� ��ʽ(26)��֪��q1��q3��q4ͬ�ţ�����q2��q1��q3��q4��ţ����

������֤
 ��
��
����������1������(i)��ȡ �����ȡ
�����ȡ ��
�� ��
�� ��
�� ����������1������(ii)��������
����������1������(ii)�������� ���ɵ�
���ɵ� �����
�����

��������1������(iii)�����Ը�������1����ϵͳ(25)��������(26)���������Ⱥָ���ȶ��ġ�֤�ϡ�
3 �������
�賵����1����ͷ������4�����泵����ɣ����������ܶ� ����������[15]�賵��������Ϊ1 000 kg���ܵ���Ħ����Ϊ200 N����������ϵ��Ϊ0.5 N��s2/m2������̶����Ϊ12 m����ʼλ��Ϊx0(0)= 100.0 m��x1(0)=90.0 m��x2(0)=79.5 m��x3(0)=68.5 m��x4(0)=57.0 m������ʼ����������e1(0)=2.0 m��e2(0)=1.5 m��e3(0)=1.0 m��e4(0)=0.5 m����ʼ�ٶ���Ϊv0(0)=25.0 m/s��v1(0)=24.5 m/s��v2(0)=24.0 m/s��v3(0)=23.5 m/s��v4(0)=23 m/s����ʼ���ٶ�a1��a2��a3��a4��Ϊ0 m/s2����ͷ�������ٶȵı仯����
����������[15]�賵��������Ϊ1 000 kg���ܵ���Ħ����Ϊ200 N����������ϵ��Ϊ0.5 N��s2/m2������̶����Ϊ12 m����ʼλ��Ϊx0(0)= 100.0 m��x1(0)=90.0 m��x2(0)=79.5 m��x3(0)=68.5 m��x4(0)=57.0 m������ʼ����������e1(0)=2.0 m��e2(0)=1.5 m��e3(0)=1.0 m��e4(0)=0.5 m����ʼ�ٶ���Ϊv0(0)=25.0 m/s��v1(0)=24.5 m/s��v2(0)=24.0 m/s��v3(0)=23.5 m/s��v4(0)=23 m/s����ʼ���ٶ�a1��a2��a3��a4��Ϊ0 m/s2����ͷ�������ٶȵı仯����

�����ɲ���ʽ(17)�����Ʋ����ֱ�ȡ ��
�� ��
�� ��
�� ��
�� ��������֤q1��q2��q3��q4���������㶨��1���ȶ�������Ϊ��������������IJ���������(13)�еķ��ź�����Ϊ���ͺ���
��������֤q1��q2��q3��q4���������㶨��1���ȶ�������Ϊ��������������IJ���������(13)�еķ��ź�����Ϊ���ͺ���
 (27)
(27)
����
���ô��ֿ�������Ȼ���ܱ�֤ ��������ʵ����һ�������н硣ȡ
��������ʵ����һ�������н硣ȡ ��i=1, 2, ������������ͼ3��ͼ4��ʾ��
��i=1, 2, ������������ͼ3��ͼ4��ʾ��
��ͼ3(a)���Կ���������֮�䱣���Ź̶��������ͼ3(b)��(c)����ʾ�������������泵�����ٶȺͼ��ٶ��ܹ��ܿ�ıƽ���ͷ�������ٶȺͼ��ٶȡ���ͼ4��֪�����г����ĸ��������12 s�ھ���������0��ʵ���˳����̶�������������Զ�������ʻ���ԡ�
ͼ5�����˵�4�����泵���ĸ��������Ϣ�����Ľ������������������ʵֵ����������������������һ����ɢ����ֵ�ļ��ϡ��ڿ�������ƽΣ�Ӧ�ÿ��Ƕ����紫�����������в�������������������ܽ���Ϊ��Ϣ����IJ�ȷ���ܵ�Ӱ�졣
�ڲ����dz�������Ϣ���������������ϵͳ�������������£�������[14]ȡ������
 (28)
(28)
�뱾����ƵĿ��������бȽϡ��������ķ�������ͼ6��
��ͼ6��֪��4�����泵���ĸ�������ڽӽ�40 sʱ��������0����ͼ5�Աȿ�֪�����ڱ�����ƵĿ����ɿ�������������Ӱ�죬�������������и���������ٶȡ�
Ϊ�˽�һ����֤���㷨����Ч�ԣ���֮ǰ�����Ļ����ϣ����������г����ѱ���10 m�����������25 m/s���ٶ���·����ʻʱ����ͷ����ͻȻ��2 sʱ����ʵ�ֽ����ƶ������ٵ�0 m/s��������泵���ķ����������ͼ7��ʾ��
��ͼ7(a)��֪�����и��泵������2 sʱ����ʵ�����ƶ��������ٵ�0 m/s����ͼ7(b)����ʾ������ĸ������Ҳ��������Ϊ0��û�з������ұ仯�������˰�ȫ�¹ʵķ�����
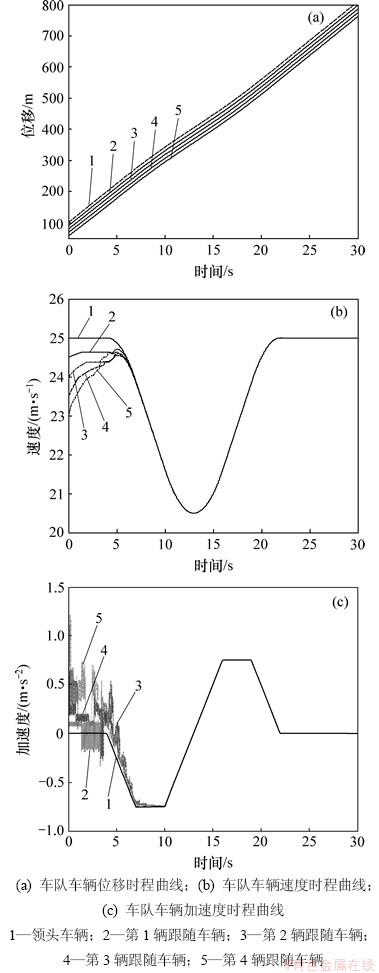
ͼ3 ���ӳ���״̬
Fig. 3 States of vehicles in platoon

ͼ4 �����������
Fig. 4 Vehicle following displacement errors
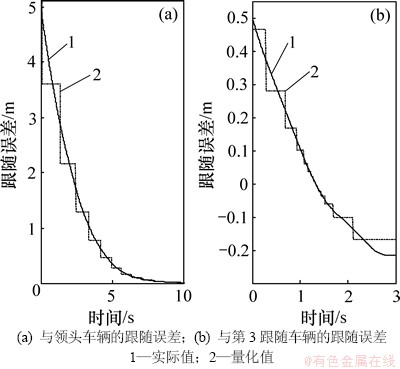
ͼ5 ��4�����泵�����յĸ������
Fig. 5 Following displacement errors received by the 4th following vehicle

ͼ6 δ�����������ʱ�ĸ������
Fig. 6 Following displacement errors without quantized error compensation

ͼ7 ���ӳ��������ƶ�
Fig. 7 Emergency breaking for vehicles in platoon
4 ����
1) ���ڳ���������������ѧģ�ͣ����ù̶����������ԣ��õ��˶��������������ŵ��µĹ�ǰ�˺��ͳ�������ϵͳ��ѧģ�͡�
2) ����������Ϊϵͳ��ȷ���ԣ�Ӧ������Lyapunov�������ó��Ĺ�����ϵͳȺָ���ȶ����оݣ��о��˲������������Զ���������ϵͳ�Ļ�ģ��������ơ��ÿ�������һ�ֲַ�ʽ��������������С�����Ʋ�����������Ⱥ�ȶ���������
3) �벻�����������Ŀ��Ʒ�����ȣ�Ӧ�ñ������ij�������ϵͳ�����������ܹ������������0��
�ο����ף�
[1] Lubomir B, Martin P. Decentralized control and communication[J]. Annual Reviews in Control, 2012, 36(1): 1-10.
[2] Rajesh R. Vehicle dynamics and control[M]. New York: Springer, 2006: 187-220.
[3] Fu M Y, Xie L H. The sector bound approach to quantized feedback control[J]. IEEE Transactions on Automatic Control, 2005, 50(11): 1698-1711.
[4] Guo G, Wei Y. Hierarchical platoon control with heterogeneous information feedback[J]. IET Control Theory and Application, 2011, 5(15): 1766-1781.
[5] ��ΰ, ����. ͨѶ����Ӱ�����������ӵĿ���[J]. ����������Ӧ��, 2011, 28(7): 1041-1048.
YUE Wei, GUO Ge. Control of autonomous platoon under networked communication effect[J]. Control Theory & Application, 2011, 28(7): 1041-1048.
[6] ��ΰ, ����. ͨ������Ӱ���µ��������ӷ�ɢʽ����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2011, 41(S1): 144-151.
YUE Wei, GUO Ge. Decentralized control of autonomous platoon under networked communication effect[J]. Journal of Southeast University (Natural Science Edition), 2011, 41(S1): 144-151.
[7] Swaroop D, Hedrick J K. String stability of interconnected systems[J]. IEEE Transaction Automatic Control, 1996, 41(3): 349-357.
[8] Swaroop D, Hedrick J K, Choi S B. Direct adaptive longitudinal control of vehicle platoons[J]. IEEE Transactions on Vehicular Technology, 2001, 50(1): 150-161.
[9] Eyre J, Yanakie D, Kanellakopoulos I. A simplified framework for string stability analysis of automated vehicle[J]. Vehicle System Dynamics, 1998, 30(5): 375-405
[10] Zhang J Y, Yang Y R, Zheng J. String stability of infinite interconnected system[J]. Applied Mathematics and Mechanics, 2000, 21(7): 791-796
[11] Zhang J Y, Suda Y, Iwasa T. Vector Liapunov function approach to longitudinal control of vehicles in a platoon[J]. JSME International Journal, 2004, 47(2): 653-658.
[12] ʩ����, �ż�ҵ, ������. ʱ���������ϵͳ��Ⱥ�ȶ���[J]. �Զ���ѧ��, 2010, 36(12): 1744-1751.
SHI Jizhong, ZHANG Jiye, XU Xiaohui. String stability of stochastic interconnected systems with time delays[J]. Acta Automatic Sinica, 2010, 36(12): 1744-1751.
[13] ������, �ż�ҵ, �ſ�Ծ. �����ʱ�ͳ����������ϵͳ��Ⱥָ���ȶ��������[J]. ���������, 2012, 27(9): 1293-1300.
XU Xiaohui, ZHANG Jiye, ZHANG Keyue. Exponential stability and control of vehicle longitudinal following system with impulsive effects and time-varying delays[J]. Control and Decision, 2012 27(9): 1293-1300.
[14] �ε, �ž���, ��ʤ��, ��. ��������Lyapunov���������Ĺ�ǰ�˺��ͳ����������[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2010, 41(6): 2195-2200.
REN Dianbo, ZHANG Jingming, CUI Shengmin, et al. Vehicle following control using front and back information based on vector Lyapunov function[J]. Journal of Central South University (Science and Technology), 2010, 41(6): 2195-2200.
[15] �ε, �Ų�, �ż�ҵ. ����ǰ����Ϣ�ij�����������Ӧ����[J]. ��������ҵ��ѧѧ��, 2011, 43(6): 76-80.
REN Dianbo, ZHANG Ce, ZHANG Jiye. Vehicle following adaptive control using front and back information[J]. Journal of Harbin Institute of Technology, 2011, 43(6): 76-80.
(�༭ �Կ�)
�ո����ڣ�2013-10-21�������ڣ�2014-01-19
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(11172247��60974132)�����Ͻ�ͨ��ѧ��ʿ�о������»���������Ŀ(2013)�������У��������ҵ���ר���ʽ�����(2013) (Projects(11172247, 60974132) supported by National Natural Science Foundation of China; Project(2013) supported by Doctoral Innovation Funds of Southwest Jiaotong University; Project(2013) supported by the Fundamental Research Funds for the Central Universities)
ͨ�����ߣ�����(1984-)���У��Ĵ������ˣ���ʿ�о��������¸��Ӵ�ϵͳ�ȶ��Է���������о����绰��13408516509��E-mail: ertongtuanyuan@163.com
ժҪ�����һ���ǰ�����ڳ�����Ϣ�Ĺ�ǰ�˺��ͳ�������ϵͳ���о����������µ��Զ��������������⡣�ٶ�ÿ�����泵��ͨ������������ǰ�����ڳ�������ͷ������״̬��Ϣ��������Ϣ�ڶ��������������´������������ڳ���������������ѧ���ģ�ͣ����ù̶����������ԣ�Ӧ������Lyapunov���������ó��ķ����Թ�����ϵͳȺָ���ȶ����оݣ�����������Ϊ��ȷ��ϵͳ״̬���������������ź�Ӱ���µĻ�ģ�����ɣ���������㳵��Ⱥ�ȶ��ԵĿ�������������������������Ƶij�����������������������������Ӱ���������Ч�������벻����������������ƵĿ�������ȣ����������ܹ�������߳����������������ٶȡ�
[2] Rajesh R. Vehicle dynamics and control[M]. New York: Springer, 2006: 187-220.
[5] ��ΰ, ����. ͨѶ����Ӱ�����������ӵĿ���[J]. ����������Ӧ��, 2011, 28(7): 1041-1048.
[6] ��ΰ, ����. ͨ������Ӱ���µ��������ӷ�ɢʽ����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2011, 41(S1): 144-151.
[12] ʩ����, �ż�ҵ, ������. ʱ���������ϵͳ��Ⱥ�ȶ���[J]. �Զ���ѧ��, 2010, 36(12): 1744-1751.
[13] ������, �ż�ҵ, �ſ�Ծ. �����ʱ�ͳ����������ϵͳ��Ⱥָ���ȶ��������[J]. ���������, 2012, 27(9): 1293-1300.
[15] �ε, �Ų�, �ż�ҵ. ����ǰ����Ϣ�ij�����������Ӧ����[J]. ��������ҵ��ѧѧ��, 2011, 43(6): 76-80.
