

DOI�� 10.11817/j.issn.1672-7207.2020.03.008
����ģʽ����ɿ�ϵͳ����ѧ����
�캣��1, 2,����1,�����1, 2
��1. ���ϴ�ѧ ���繤��ѧԺ������ ��ɳ��410083��
2. ���ϴ�ѧ �����ܸ�����������ص�ʵ���ң����� ��ɳ��410083��
ժ Ҫ��
����ɿ�ϵͳ���м�ֵ��˶����ɣ���������������������5 kmӲ��ˮ������ϵͳ��������ģ�ͣ��������е�ȫ�����㷨�����3�ֿ��ܵı���ģʽ(Բ�Ρ����Ρ��۷�����ģʽ)��������ͬ����ģʽ�������ٶȡ��ϰ��������м���˶����Ե�Ӱ�죬������ģ��ʵ���о����о�����������м�ֵ��˶���Ҫ�����ڼ����ǰ���ķ����ϣ�����ʼ�㸽�����۷�����ģʽ�£����Ͻ���ʱ�м��λ�Ƶ����ֵ��3.0 m����Բ�κ;��α���ģʽ�ĸߣ��������ٶȴ�0.4 m/s���ӵ�1.0 m/sʱ���м��λ��ƽ��ֵ�����ӷ���С��0.2 m���ϰ��������м���˶�����Ӱ��ϴ��м��λ��ƽ��ֵ�����ֵ���ϰ����������Ӷ����٣��ڽ��вɼ�·���滮ʱ������ʹ�ϰ���������200 m����ˣ��Լ�������б����㷨���ʱ������Ҫ�����㷨�Ŀ����ԣ���Ҫ��������ϵͳ�ڲ�ͬ����ģʽ�¶���ѧ���ԡ�
�ؼ���:��ɿ���������������ѧ����������ģʽ���м��
��ͼ�����:TH113.2+2 ���ױ�־��:A ���ſ�ѧ(��Դ����)��ʶ��(OSID)
���±��:1672-7207��2020��03-0641-09
Dynamic analysis of deep sea mining system in obstacle avoidance mode
XU��Hailiang1, 2, PENG��Neng1, YANG��Fangqiong1, 2
(1. College of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China��
2. State Key Laboratory of High Performance Complex Manufacturing, Central South University, Changsha 410083, China)
Abstract: To study the motion characteristics of the buffer in the deep sea mining system in the obstacle avoidance mode, a virtual prototype model of 5 km hard-tube hydraulic conveying system was established based on the virtual prototyping technology. Three possible obstacle avoidance modes(circle, rectangle, reciprocating mode) were proposed according to the existing full-area coverage algorithm. The effects of the type of obstacle, obstacle avoidance speed and obstacles distance on the kinetic characteristic of buffer were analyzed. And the simulation experiment was carried out. The results show that the movement of the buffer mainly occurs in the forward direction of mining machine. The maximum displacement of buffer is up to 3.0 m near the initial point, which is higher than those of circular and rectangular obstacle avoidance modes. When the obstacle avoidance speed increases from 0.4 m/s to 1.0 m/s, the average increment of displacement of buffer is less than 0.2 m. The obstacle distance has a great influence on the motion characteristics of the buffer. The average and maximum values of displacement of buffer decrease with the increases of obstacle distance. When planning the acquisition path, it is recommended to make the distance between obstacle and buffer greater than 200 m. Therefore, when designing the obstacle avoidance algorithm for the mining machine, it is suggested to consider not only the feasibility of the algorithm, but also the dynamics characteristics of the whole system in different obstacle avoidance modes.
Key words: deep sea mining; virtual prototype; dynamics analysis; obstacle avoidance mode; buffer
2016�꣬�ҹ����Ϻ�ij������е���ɿ�ù�����ϵͳ����ʵ��ɹ�ͨ��ר�������գ�ʵ�����ҹ��Ӻ������Ե���ʷ��ת��[1]������ɿ�ϵͳ���ԣ�Ŀǰ�о������Ӳ��ˮ������ϵͳ����ϵͳ�ɺ���֧�Ŵ������Ӳ�ܡ��м�֡�������ܡ����������ϵͳ���[2]����Ϊ��ɿ�ϵͳװ������Ҫ��ɣ�Ӳ��ˮ������ϵͳ�Ķ���ѧ��ϵ���ɿ�ϵͳ������ơ���ȫУ���Լ�ϵͳ���п��Ƶ����棬�Ҳɿ�ϵͳ���������ǧ�ĺ�����ɲɼ���ҵ������������δ֪���ɼ��������ϰ������Ա��⣬���Ϲ�����ϵͳ����ѧ���ⲻ�ݺ��ӡ��ڲɿ�ϵͳ����ѧ���棬������ѧ�߽�����һЩ�о���������[3-4]ͨ���ռ䡰������Ԫ��ɢԪģ�ͣ�������ѧ��ģ��ģ��ʵ�����ϵķ������������������ܵĶ�̬���ԣ��캣����[5-6]��������Ԫ������������������̬�������λ�ö������������ֲ���ѹ����ʧ��Ӱ�죬���õ��˹���ϵͳ�ں������˶����������㹫ʽ��LI��[7-8]����ADAMS/VIEW����1 kmӲ��ˮ�����Ͳɿ�ϵͳ�����������о��˲�ͬ�����ٶȺͺ����ٶ��Լ�˳������������²ɿ�ϵͳ�Ŀռ乹�ͣ���褵�[9-12]����ADAMS/VIEW��RecurDyn/Track����1 km�ɿ�ϵͳ��������ģ�ͣ�����ϵͳ�ں����۷�ʽ�������۷�ʽ2�ֲ�ͬ�ɼ�·���µ�ϵͳ�������ԣ�֤������2�ֲɼ�ģʽ�Ŀ����ԣ����ó���ϵͳ��ֱ����ʻ������ת�䡢����Խ��������ģʽ�µ��˶�ѧ���ɣ����յ�[13]�ֱ���ö��嶯��ѧ������Ԫ����������������ϵͳ�����Լ���ά�������̵��˶�ѧ�Ͷ���ѧ���ԣ�PARK��[14]�������϶Աȼ����˲�ͬ�ɼ�·�������������Էǹ��������ȫ�����㷨��OH��[15]������ҵ����DAFUL��ģ���������ɿ�ϵͳ���˶����ԣ��õ��м���������Ӷ����ܵ������غɼ����ι���ֵ���ڼ���������㷨�ϣ�ʷ��ѩ��[16]������Ⱥ�㷨������ڽ����غ�����ƫ�Ʊ��ϲ��ԣ�����֤�˸��㷨�Ŀ����ԣ�������[17]����LabVIEW��MATLAB��ϱ�̣�������ѧ���ѧ��������Ϣ�ںϼ����������˼�����������Ͽ��Ƶ���ϸ���̡�Ŀǰ���Բɿ�ϵͳ����ѧ������о���Ҫ�����ھ�̬ģʽ�µĹ���ϵͳ��Һ����������ϵͳ�ڵ����������߿ռ乹�͡������ɼ�ģʽ�µ�ϵͳ���������Լ������ϱ����㷨�Ŀ����Է��棬�����ڱ��Ϲ����вɿ�ϵͳ����ѧ���о����١�Ϊ�ˣ����������Ա���ģʽΪ�������о���ͬ����ģʽ���ϰ���λ�á������ٶȶ��м���˶����Ե�Ӱ�죬Ϊʵ����ɿ�·���滮������㷨����ṩ����ָ����
1 Ӳ��ˮ������ϵͳ��������ģ��
1.1��ģ�ͷ������
��ɿ����ϵͳ�ڲɼ���ҵ�����б���Ϊ����Ρ�ǿʱ�䡢�����Եȶ���ѧ����[18]�����ǵ��ɿ�ϵͳ�ĸ����Ժ�����������ģ˼�룬�Բɿ�ϵͳ���м�
1) ֻ���Dzɿ��м�֡���������������ߴ硢����λ���Լ���ܵ������ӷ�ʽ�����������ڲ�ϸ��������
2) ���ܵ������е��µ�ͨѶ������豸����ģʱ�������Ǹ���������������������ɲ��ֹܵ�������
3) ʵ���У��ܵ�֮����ר�ŵ����ӻ��������IJ����Ǿ�������ӻ������������Ϊ�����������ȵ����������ӡ�
�����������輰ADAMS/VIEW������õ�5 kmӲ��ˮ������ϵͳ��ͼ1��ʾ��
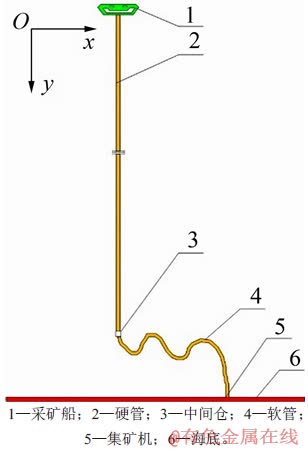
ͼ1���ɿ�ϵͳ��������
Fig. 1��Virtual prototype of mining system
1.2����������
ͼ1��ʾ��������ģ���У��ɿ�λ��(0, 0, 0)�����м����������(0,-4 600, 0)�����ܳ���Ϊ400 m�������϶������м�֣��¶��뼯���������Ϊ�˱�֤������ϴ�IJɼ���Χ�����Ҽ������ܶԼ������ǣ�����ã����ܲ��ְ�װ������[19]��ͬʱ�趨����������ϵͳ�˶������෴����������0.772 m/s����������0.15 m/s��
���ݼ��裬���ο�����[20]�еIJ�����Ʒ����������ֲ����������£�Ӳ�ܲ���ΪP110�֣��ܳ�Ϊ4.6 km����ɢΪ460�Σ�ÿ�γ�10 m���ܵ��⾶Ϊ219 mm���ܵ��ں�Ϊ12.7 mm�������ܳ�400 m����ɢΪ100�Σ�ÿ�γ�4 m�����⾶��Ӳ�ܵ�һ�¡�������������������ģ�г��õ�����������ʽ�������������ɲο�����[21]�еļ��㷽����k1=EA/L��k2=k3=GA/L��k4=G��d4/L��k5=EI/L��k6=GI/L�����У�k1Ϊy��������ն�ϵ����k2��k3�ֱ�Ϊx��z������иն�ϵ����k4Ϊy����Ťת�ն�ϵ����k5��k6�ֱ�Ϊx��z���������ն�ϵ����G��E��L��A��d�ֱ�ܵ��ĵ���ģ��������ģ�������嵥Ԫ���ȡ������������ֱ����Ӳ������������������������������ͬ�������㷽��һ�¡�Ӳ���������������������1��ʾ��
��1������������
Table 1��Brushing force parameter

1.3������Һ����
�ɿ�ϵͳ������˶�ʱ�������������ԣ��ܵ����ܵ�����������Ӱ�졣�ɿ�ϵͳ�е����ܵ�����ϸ���ˣ�ϸ�����������е�������������Morison���̵�Ч[22-23]��Ϊƥ��Ӳ�ܽ�ģʱ������ϵͳ���涨x����Ϊ��������x-zΪ��ƽ�棬y����Ϊ�ɺ���ָ�ס��ɿ������ܵ����Ӵ�Ϊ����ԭ�㡣���ǵ�Ӳ��ϵͳ��Ժ�ˮ���˶��ٶȣ���������˶���Morison����Ϊ


ʽ�У�CDΪ����ϵ��[24]��Ϊ1.8��CMΪ������ϵ����Ϊ0.46��
2 �������������ģʽ����
�ɿ�ϵͳ����ʱ���м���ڲɿ��϶�����ϵͳһ���˶������˶�������Ҫ�ɲɿ��˶���ʽ�����������ɿ�����ֻ�м�����˶�ʱ���м�ֵ��˶���������ԣ����м���ڲ����и��ӵĸ��ϻ������м�ֻζ�����ʱ��������ڲ����������Ҷ����������ڶ���������ǰ�˵��о�����ǻ��Һ��Ļζ������ϵͳ��������ͬʱҲ����ɹܵ����Ӵ���ƣ���ƻ�[25]����ˣ�ʵ�ʲɿ�ʱ��������֤�м�ִ����ȶ�״̬����������Ϊ�����ݼ�����ɼ���Χ������������Ϊ����С������һ��С�����ڣ��ɿ������������ɲɼ���ҵ��һ������ɼ���ɺ�ͨ��ϵͳ���������ơ�����һ����������ɼ������Ľ��ɿ���������������ɼ���������Ϊһ�������ɼ�������Ƶ�������
��������ӣ����ε�òδ֪���������ڼ�������Ա��������ֱ����ʻ�����������ײ����ϰ�����ο��ݵȸ������ʱ����������ȡ����ı��ϲɼ�ģʽ��ʵ�����ϰ�������ڲɿ�ϵͳ��λ�÷ֲ���������ԣ����DZ����ص������������ƹ��ϰ���������м�ֵ��˶����ԡ����ֻ���Ǽ����ǰ�������ϵ��ϰ���ɿ�ϵͳ��άʾ��ͼ��ͼ2��ʾ��
���⣬��ϰ�����״����С�����ԡ�ʵ�ʿ�չ�ɼ���ҵʱ�����ڼ�����������ޣ�����ʹ������ϸ����ϰ����Ե���ߣ���ˣ��ɲ���ͼ�����е�����ʶ��ͱ�Ե��ⷽ���������ϰ�����״����С���ϰ�����࣬Ȼ�����ʵʱ�����ϰ��Ϊ�����ƥ����ʵ����߱���ģʽ��
Ϊ���ڷ�����������������ϰ�����״����Ϊ����ľ��κ�Բ�Σ��Ҳ����Ǽ����Խ���Ͱ��ϰ����Խ����ʽ�����ݼ����������ģʽ�����е�ȫ�����㷨�������¼��裺���ϰ������ߴ����2��������IJɼ����ȣ�������۷�����ģʽ�������ٽ�һ�������ϰ������״���滮��Բ�κ;��α�������ģʽ��
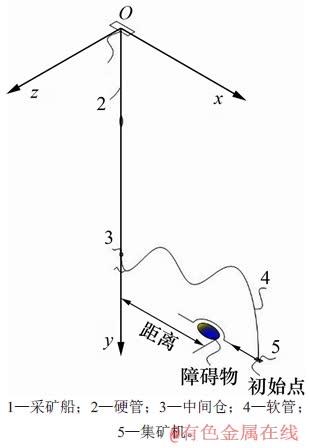
ͼ2���ɿ�ϵͳ��άʾ��ͼ
Fig. 2��3D schematic diagram of mining system
3�ֱ���ģʽ(Բ�Ρ����Ρ��۷�����ģʽ)�ı��Ϲ�����ͼ3��ʾ����Բ�α���ģʽ�£���������ϰ���ǰ����Բ��ǰ���ķ�ʽ�ƹ��ϰ����ʱ��������������������ٶȷ�����ת���Ϊƽ�����ھ��α���ģʽ�£���������ϰ���ǰ��ֹͣ��ʼ��ǰ���˶���Ȼ��ת��90�㣬����һ��������ʻһ�����룬Ȼ���ճ�ʼǰ���ķ����ƹ��ϰ�����۷�����ģʽ�£������ϰ������ߴ�ϴ��Խ���©����ΪĿ�꣬��������ϰ���ǰ���Զ���۷��ķ�ʽ�ƹ��ϰ����ɿ�ʯ��Դ�IJɼ���

ͼ3������ģʽʾ��ͼ
Fig. 3��Schematic diagram of obstacle avoidance mode
Ϊ�����ر���������������Բ���ϰ���뾶Ϊ25 m�������ϰ��ﳤ��Ϊ25 m������Ϊ50 m���������ʼλ�þ����м��Ϊ350 m�����涨������ӳ�ʼ��������м���˶���
3 �������
3.1������ģʽ�Աȷ���
�м���ǿ�ʯ�����Ӽ����������ɿ��м���Ŧվ��������Ӳ�ܣ����������ܡ�һ���������ڣ�������϶����ܣ�����ʹ���ܰڶ������м�����һ�����Ŷ����á���ͼ2��ʾ���м��y������˶��ܵ�Ӳ�����ƣ���˱����ص��о��м��x��z������˶�����������У����3�ֱ���ģʽ��ͨ����д�˶��������������ú��ٶȾ�Ϊ0.5 m/s���õ�3�ֲ�ͬ����ģʽ���м��x��z�����λ����ʱ��ı仯���ߣ���ͼ4��ʾ��
��ͼ4(a)��֪���ڲ�ͬ����ģʽ�£��м�ֵ�x����λ�Ʋ��ܴ�0~100 s�ڣ�3�ֱ���ģʽ�£��м��λ���������غϣ�100 s������λ���ȶ���1.5 m���ҡ���������ǰ100 s��3��ģʽ�¼������������ֱ���˶���100 sʱ���������ʼת��x������˶��ٶ��½���100 s��3�ֱ���ģʽ�£��м��x����λ�Ƽ������ӡ����У��۷�����ģʽ�£��м��x�����λ����ʱ��仯�ٶ�������죬������ǰ100 s���൱��Բ�α���ģʽ��֮�������α���ģʽ�£�100~150 s�ڣ�x����λ�Ƽ������ֲ��䣻150 s�����۷�����ģʽ��ͬ�����ٶ����ӡ�������Ϊ��100~150 s�ڣ����α���ģʽx�����ٶ�Ϊ0 m/s��z������ٶ�Ϊ0.5 m/s��������Բ�����������̣�100~150 s�ڣ�x��z�����ٶȾ���Ϊ0 m/s�����۷�����ģʽ�£����������ͬ���ٶȷ������˶������������ܴ����ɳ�״̬���ڹ��������£��м��x�����λ�Ƽ������ӡ�250 s���ң����Ͻ������۷�����ģʽ���м��λ�ƴﵽ���ֵ3.0 m��Բ�κ;��α���ģʽ���ֵΪ2.8 m���Ե����۷�����ģʽ���ֵ��������Ϊ���۷�ʽģʽ�£����������·���۷������࣬������ܵİڶ����ýϴӶ��м�ֵ��˶��ܵ���Ӱ��ҲԽ����ˣ�ʵ��ִ�б��Ϲ���ʱ���������Բ�κ;��α���ģʽ��
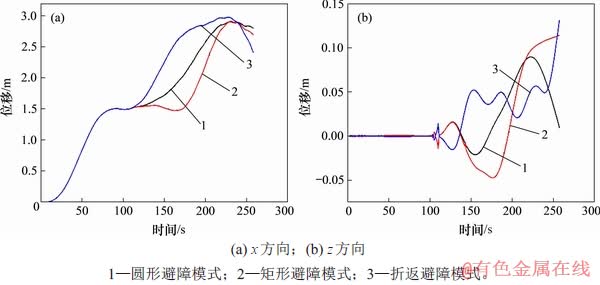
ͼ4��3�ֱ���ģʽ���м��λ����ʱ��ı仯����
Fig. 4��Curves of displacement of buffer with time in three obstacle avoidance modes
��ͼ4(b)��֪����ǰ100 s�ڣ�3��ģʽ�£��м��z����λ�������߸����仯��100 s��z�����λ�Ʊ仯����-0.05~0.12 m֮�䡣��ͼ4(a)�Աȿ�֪��z�����λ��ԶС��x�����λ�ơ�������Ϊ3�ֱ���ģʽ�£���������˶���Ҫ������x����
3.2�������ٶȶ��м��λ�Ƶ�Ӱ��
���ڼ������ҵ�����������ԣ��ο�����[12,26]������������ٶȷ�Χ������0.4~1.0 m/s�����ȡ����������ٶ�Ϊ0.4��0.6��0.8��1.0 m/s���ϰ�������м��350 m���Աȷ���������ı����ٶȶ��м���˶���Ӱ�죬������ͬ�ٶ��µķ���������ƽ��ֵ�����ֵ���õ���ͼ5��ʾ���м��x����λ��(��ơ��м��λ�ơ�)���ٶȵı仯���ߡ�
��ͼ5(a)���Կ�������Բ�κ;��α���ģʽ�£��м��λ�Ƶ�ƽ��ֵ������ٶ����Ӷ����ӣ������ӷ�����0.1~0.2 m֮�䣻˵���ٶ���0.4~1.0 m/s֮����м��λ��ƽ��ֵӰ�첻�����۷�����ģʽ�£��м��λ�Ƽ������ܱ����ٶȵ�Ӱ�졣���������Ͽ����������ٶ�0.4 m/s���ӵ�1.0 m/sʱ����Բ�α���ģʽ�£��м��λ�ƾ��Ⱦ��κ��۷�����ģʽ��С��������Ϊ����Բ���������ߣ������x��z������ٶȱ仯��С�����ٶ��л��������ļ��ٶȽ�С�����ܺ��м���ܵ���Ӱ��ҲԽС�����۷�����ģʽ�;��α���ģʽ�£�����������ٶ���x��z������ж�α任���Ӷ�������ϵͳ�IJ��ȶ��ԡ�
��ͼ5(b)��֪���м��λ�Ƶ����ֵ������ٶ����Ӷ����ӡ���Բ�κ;��α���ģʽ�£��������ٶȴ�0.4 m/s���ӵ�1.0 m/sʱ���м��λ�Ƶ����ֵ���ӷ�����1 m���ң����۷�����ģʽ�£��������ٶȴ�0.4 m/s���ӵ�1.0 m/s��λ�Ƶ����ֵ��3.1 m���ӵ�5.2 m���ұ����ٶȴ���0.6 m/s���м��λ�Ƶ����ֵѸ�����ӡ���ˣ����������2�ֱ���ģʽ�����Ϲ����е��۷�����ģʽ������ʱ��Ӧ���Ʊ����ٶȵ���0.6 m/s��
3.3���ϰ��������м���˶���Ӱ��
�ϰ���ֲ��ں���λ�þ�������ԣ�����ϰ������м�ֵľ���(�ϰ������)���м���˶���Ӱ����ɽ����о�������Բ�ͬλ���ṩ��ͬ�ı��Ϸ�������������˶���Χ�ܵ�����ǣ�ƣ��ڳ�ʼλ��ʱ������������м��350 m���������Զ���ʼ�����м�ַ�����б���ʱ���ϰ������ԽС���ܵ����ܵ�ǣ������Խ���м�ֵ��˶��ܵ���Ӱ��Խ�����ϰ������ֱ�Ϊ100��150��200��250��300 m�������ٶȾ�Ϊ0.5 m/sʱ��3�ֱ���ģʽ���ϰ��������м��λ�Ƶ�Ӱ�������ͼ6��ʾ��
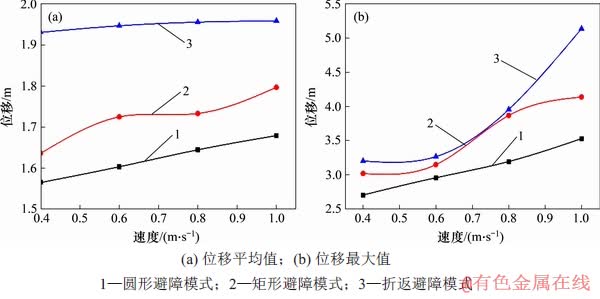
ͼ 5����ͬ����ģʽ�±����ٶȶ��м��λ�Ƶ�Ӱ��
Fig. 5��Influence of speed on displacement of buffer at different obstacle avoidance modes
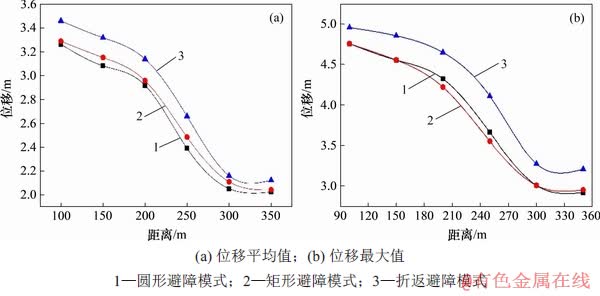
ͼ 6����ͬ����ģʽ�±��Ͼ�����м��λ�Ƶ�Ӱ��
Fig. 6��Influence of distance on displacement of buffer at different obstacle avoidance modes
��ͼ6�ɿ������ϰ�����벻ͬʱ���м��λ�Ƶ�ƽ��ֵ�����ֵ���ϴ������ϰ���������ӣ�3��ģʽ���м��λ�Ƶ�ƽ��ֵ�����ֵ�����½����ơ����ϰ������Ϊ100 mʱ���۷�ʽģʽ�£�λ��ƽ��ֵ�ӽ�3.5 m��Բ�κ;��α���ģʽ��Ϊ3.2 m���ң��ϰ���������ӵ�300 mʱ���۷�����ģʽ�£�λ��ƽ��ֵ��Ϊ1.9 m���ң�Բ�κ;��α���ģʽ��ƽ��ֵ��Ϊ1.7 m���ҡ����ϰ�������100 m���ӵ�200 mʱ���ϰ������ÿ����50 m��λ��ƽ��ֵ�½�����Ϊ0.2 m���ң��ϰ�������200 m���ӵ�300 mʱ���ϰ������ÿ����50 m��λ��ƽ��ֵ������0.5 m���ң��½��ٶ����Ը����ϰ������Ϊ100~200 mʱ���½��ٶȡ��ϰ�������300 m���ӵ�350 mʱ��λ��ƽ��ֵ�������䣬�ȶ���2.0 m���ҡ�������Ϊ�ϰ������С��200 mʱ�����������ر��Σ��Լ�������˶������������������ϰ������Ϊ100~200 mʱ���м��λ��ƽ��ֵ�����ֵ�½����ƻ��������ϰ���������200 mʱ����������չ���Լ�������˶��������ü�ǿ�����ϰ������Ϊ200~300 mʱ���м��λ��ƽ��ֵ�����ֵ�½��ϴ��ϰ������Ϊ300~350 mʱ�������Ѵ�����ȫ��չ״̬���Լ����������ЧӦҲ�ﵽ�����ˣ��ϰ������Ϊ300~350 m��Χ�ڣ��м��λ��ƽ��ֵ�����ֵ�������䡣
��ͼ6(b)��֪���۷�����ģʽ�£��ϰ������100 mʱ���м��λ�����ֵ�ӽ�5.0 m��Բ�κ;��α���ģʽ�£��м��λ�����ֵΪ4.75 m�����۷�����ģʽ���Ե͡����ϰ������Ϊ300~350 mʱ���۷�����ģʽ�£�λ�����ֵ�ȶ���3.2 m��Բ�κ;��α���ģʽ�£�λ�����ֵ�ȶ���3.0 m���ң���λ�����ֵ���ϰ������ı仯������ƽ��ֵ���ϰ������ı仯���Ƽ���һ�¡���ˣ����б���·���滮ʱ��Ҫ�����ϰ������м�ֵľ��룬���������ϰ������С��200 m��
4 ʵ����֤
�������ϴ�ѧ���繤��ѧԺ�����ܸ�����������ص�ʵ���ҵ�ʵ���豸����������ԭ�����ģ��ʵ��ƽ̨���Բ�ͬ����ģʽ���м�ֵ��˶����ɽ���ʵ���о�������֤����������ȷ�ԡ�ģ��ʵ��ƽ̨��ͼ7��ʾ��ʵ��ϵͳ��������ϵͳ��ʵ��̨�Ͳ���ϵͳ��ʵ�������ùܵ�����ֱ��Ϊ1 mm��ͭ˿���棻�м�ֲ��ñ߳�Ϊ30 mm��������������棻���ܲ����ھ�Ϊ2 mm���⾶Ϊ3.2 mm��PVC�ܵ����棻�Զ�ѭ��С�����漯�����ʹ�ù�ҵ���Ȳ����ķ���ģ�⺣��Һ����������ʵ��ǰ�����ȸ��ݷ������ã��ڼ����ǰ�������ϲ����ϰ��Ȼ���ú�ɫ������ʾ3�ֱ�������ģʽ��ƽ̨�������ɫ���棬��ճ����ɫ����ģ�⼯���3�����߹켣����������̽��ͷ�ĸ߶�ʹ������������ƽ�롣ͬʱ������С�����߹켣����C���Ա�д�Զ�Ѱ����������д��51��Ƭ���������С�ʵ������У�ʹ�ü���̽��ͷʵʱ�����м�ֵ�λ���������ͨ�����ݲɼ�����λ�����ݲɼ���������С�
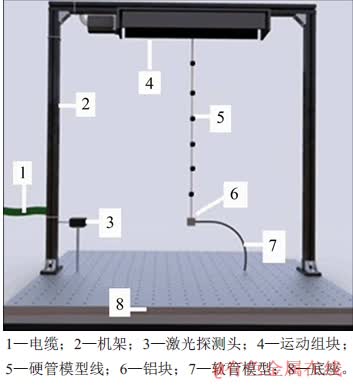
ͼ 7��ģ��ʵ��ƽ̨
Fig. 7��Experimental platform
ʵ������������Ա����2��ʾ���ӱ�2�ɼ����м��λ��ʵ�����ȷ�������������Ϊ����ʱ�����˼�����뺣�Ӵ���֮�����ֵ����ʵ��ƽ̨�����ã�ʵ��ʱ���ڴ�������ʵ����ƫ�ߡ�������֮�����������8%���ڣ������������Ŀ��ŶȽϸߡ�
��2���м��λ��ʵ��ƽ��ֵ�����ƽ��ֵ�Ա�
Table 2��Comparison of average displacement of buffer in simulation and experiment

5 ����
1) ��ʼ�㴦��3�ֱ���ģʽ�£��м��x�����λ��Զ����z�����λ�ƣ����۷�ʽ����ģʽ�£��м��λ�Ƶ����ֵ��3.0 m������Բ�κ;��α���ģʽ�µ�λ�����ֵ����ˣ���ʼ�㸽�������ȡԲ�α���ģʽ�;��α���ģʽ��
2) ��3�ֱ���ģʽ�£������ٶ��м��λ��ƽ��ֵӰ���С�������ٶȴ�0.4 m/s���ӵ�1.0 m/sʱ��λ��ƽ��ֵ������Ϊ0.2 m�����ٶȴ���0.6 m/sʱ���۷�����ģʽ�£��м��λ�Ƶ����ֵ������Բ�κ;��α���ģʽ�ĸߣ���ˣ���λ�����ֵ�ĽǶȣ������۷�ʽ����ģʽʱ���������Ʊ����ٶȲ�����0.6 m/s��
3) �м��λ�����ϰ����������Ӷ����٣����ϰ��������200~300 m�ķ�Χ�ڣ�λ��ƽ��ֵ�����ֵ���½��������300~350 m��Χ�ڣ�λ��ƽ��ֵ�����ֵ�������䡣��ˣ������㷨���ʱ��Ӧ�����м�����ϰ���֮��ľ��룬����ʹ�ϰ���������200 m��
4) �м��λ��ʵ��ƽ��ֵ�����ֵ����������8%���ڣ������������Ŀ��ŶȽϸߡ�
�ο����ף�
[1] XU Hailiang, CU Cong, WU Bo. Theoretical analysis of effect of solid phase on cavitation performance of deep-sea mining pump[J]. Journal of Chongqing University, 2018, 17(2):49-54.
[2] VOLKMANN S E, KUHN T, LEHNEN F. A comprehensive approach for a techno-economic assessment of nodule mining in the deep sea[J]. Mineral Economics, 2018, 31(3): 319-336.
[3] ����, ����ɭ, ������, ��. ����ɿ��������ܶ������Ե���ֵ�о�[J]. ����, 2001, 19(1): 59-64.
JIAN Qu, HE Yongsen, WANG Minghe, et al. Numerical study of dynamic behavior of flexible pipes in deep sea mining[J]. The Ocean Engineering, 2001, 19(1): 59-64.
[4] ��, �Ԫ, ���. ��ɿ�ϵͳ���������ܵ���ֵģ��[C]//ȫ����ҵ�뻷��������ѧ����. ����, 2001: 199-205.
CUI Kai, LI Baoyuan, JI Zheng. Numerical simulation of conveying hose in deep sea mining system[C]//National Conference on Industry and Environment Fluids Mechanics, Dalian, China, 2001: 199-205.
[5] �캣��, ����, �Ⲩ, ��. ���ܺͿ���ɿ�ϵͳ��Ӱ����ɷ���[J]. ���������, 2017, 34(1): 231-235, 287.
XU Hailiang, LI Li, WU Bo, et al. Influence of flexible hose and nodule collector analysis on deep-sea mining transporting system[J]. Computer Simulation, 2017, 34(1): 231-235, 287.
[6] �캣��, ���廪. ��ɿ�����ϵͳ���˶����غɷ���[J]. ���ϿƼ���ѧѧ��(��Ȼ��ѧ��), 2005, 20(1): 21-24.
XU Hailiang, HE Qinghua. Nonlinear mechanical analysis theory of the sea mining flexible mineral transporting pipe[J]. Journal of Hunan University of Science & Technology(Natural Science Edition), 2005, 20(1): 21-24.
[7] LI Yan, LIU Shao Jun, LI Li. Dynamic analysis of deep-ocean mining pipe system by discrete element method[J]. China Ocean Engineering, 2007, 21(1):175-185.
[8] ����, ���پ�, ������. ���ڶ������ɢԪģ�͵���ɿ�ϵͳ����ѧ����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2006, 37(4): 742-747.
LI Yan, LIU Shaojun, YU Hongyun. Dynamic analysis of deep-ocean mining system based on multi-rigid-body discrete element model[J]. Journal of Central South University(Science and Technology), 2006, 37(4): 742-747.
[9] ���, ���پ�. ��ɿ�����ϵͳ����ѧ��ģ������������ҵ���̿��ٷ������[J]. ��е����ѧ��, 2012, 48(9): 79-88.
DAI Yu, LIU Shaojun. Establishment of the dynamic model of the total deep ocean mining system and fast simulation of its integrated operation process[J]. Chinese Journal of Mechanical Engineering, 2012, 48(9): 79-88.
[10] DAI Yu, LIU Shaojun. An integrated dynamic model of ocean mining system and fast simulation of its longitudinal reciprocating motion[J]. China Ocean Engineering, 2013, 27(2): 231-244.
[11] ���, �Ž�, ����, ��. ���ڶ��嶯��ѧģ�ͼ��ɵ���ɿ�ϵͳ��������[J]. ��е����ѧ��, 2017, 53(4): 155-160.
DAI Yu', ZHANG Jian, ZHANG Tao, et al. Motion simulation of the deep ocean mining system based on its integrated multi-body dynamic model[J]. Chinese Journal of Mechanical Engineering, 2017, 53(4): 155-160.
[12] ����, ���, ���پ�, ��. ��Ĵ�ʽ��������嶯��ѧ��ģ���������ܷ������[J]. ��е����ѧ��, 2015, 51(6): 173-180.
ZHANG Tao, DAI Yu, LIU Shaojun, et al. Multi-body dynamic modeling and mobility simulation analysis of deep ocean tracked miner[J]. Chinese Journal of Mechanical Engineering, 2015, 51(6): 173-180.
[13] ����, ����. ��ɿ�ϵͳ�����ģ��[J]. ʵ�����о���̽��, 2006, 25(1): 49-52.
WANG Gang, XU Yu. Computer simulation research on deep-sea mining system[J]. Laboratory Research and Exploration, 2006, 25(1): 49-52.
[14] PARK S J, YEU T K, YOON S M, et al. A study of sweeping coverage path planning method for deep-sea manganese nodule mining robot[C]//Oceans 2011. Waikoloa,USA: IEEE, 2011: 1-5.
[15] OH J W, LEE C H, HONG S, et al. A study of the kinematic characteristic of a coupling device between the buffer system and the flexible pipe of a deep-seabed mining system[J]. International Journal of Naval Architecture and Ocean Engineering, 2014, 6(3): 652-669.
[16] ʷ��ѩ, ��Ӣ��, �ް���, ��. ������Ⱥ�㷨��ɿ�����˹���·���滮[J]. ����, 2008, 26(2): 119-123.
SHI Chunxue, BU Yingyong, LUO Bowen, et al. Path planning for deep sea mining robot based on ant colony algorithm[J]. The Ocean Engineering, 2008, 26(2): 119-123.
[17] ����, ����. ����LabVIEW���������ϵ�������ϵͳ���[J]. ��е���������, 2018(8): 159-161, 165.
YANG Xiao, WANG Min. Analysis of obstacles avoidance and navigation control system of deep-sea mining vehicle based on LabVIEW[J]. Machinery Design & Manufacture, 2018(8): 159-161, 165.
[18] �븣�, ������, ������. ��������Ԫ�������������������������������������ˮƽ�˶�[J]. �����Ƽ���ѧѧ��, 2006, 28(12): 1152-1156.
FENG Fuzhang, FENG Yali, ZHANG Wenming. Lateral movement of lifting strings connected by screwed joints and spherical joints in deep sea by finite element analysis and virtual prototype technology[J]. Journal of University of Science and Technology Beijing, 2006, 28(12): 1152-1156.
[19] �Ⲩ, ��С��, �ﳬ, ��. ��ɿ�ϵͳˮ���������о�����[J]. �й��촬, 2016, 57(3): 204-214.
WU Bo, CHENG Xiaoming, TIAN Chao, et al. Research advance on hydrodynamic techniques in deep sea mining system[J]. Shipbuilding of China, 2016, 57(3): 204-214.
[20] ����. ������ά��ɢԪ����ģ�͵���ɿ�1000 m����ϵͳ������������ѧ�о�[D]. ��ɳ: ���ϴ�ѧ���繤��ѧԺ, 2009: 78-84.
LI Yan. Dynamic analysis of 1000 m ocean pilot mining system based on three-dimensional discrete element method pipe model[D]. Changsha: Central South University. School of Mechanical and Electrical Engineering, 2009: 78-84.
[21] ����. 1000������ɿ�ϵͳ���Ż��չ��̵����������о�[D]. ��ɳ: ���ϴ�ѧ���繤��ѧԺ, 2004: 45-54.
XU Yu. Virtual prototype research on the deployment process of 1000 m sea trail deep mining system[D]. Changsha: Central South University. School of Mechanical and Electrical Engineering, 2004: 45-54.
[22] �ؾ���, ����, �˽���. �����Բ�ͬ��û���ˮƽԲ�����غɷ���[J]. �Ϻ���ͨ��ѧѧ��, 2018, 52(8): 938-945.
BAI Junli, MA Ning, GU Xiechong. Wave-current loads on the horizontal cylinder with varying submergence depths[J]. Journal of Shanghai Jiao Tong University, 2018, 52(8): 938-945.
[23] RAED K, GUEDES SOARES C. Variability effect of the drag and inertia coefficients on the Morison wave force acting on a fixed vertical cylinder in irregular waves[J]. Ocean Engineering, 2018, 159: 66-75.
[24] LIU Chunguang, SUN Guoshuai. Calculation and experiment for dynamic response of bridge in deep water under seismic excitation[J]. China Ocean Engineering, 2014, 28(4): 445-456.
[25] �γ���, �ܹ���, ��С��, ��. �ǹ�����Բ��ˮ��Һ��ζ�������������[J]. ���������̴�ѧѧ��, 2018, 39(1): 187-192.
SONG Chenning, ZHOU Guoliang, LI Xiaojun, et al. Experiment on sloshing dynamics of irregular annular cylinder water tank[J]. Journal of Harbin Engineering University, 2018, 39(1): 187-192.
[26] ����. ����ADAMS����ɿ�ϵͳ����ģ��[J]. ��ɽ��е, 2006, 34(8): 26-27.
LI Yan. Simulation to the linkage of the mining system in deep ocean on basis of ADAMS[J]. Mining & Processing Equipment, 2006, 34(8): 26-27.
���༭ �Կ���
�ո����ڣ� 2019 -04 -23; �����ڣ� 2019 -07 -08
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51775561)������ʡ��Ȼ��ѧ����������Ŀ(2018JJ2522) (Project(51775561) supported by the National Natural Science Foundation of China; Project(2018JJ2522) supported by Natural Science Foundation of Hunan Province)
ͨ�����ߣ����������ʿ�����ڣ����»�еϵͳ����ѧ�о���E-mail��yangfqcsu@163.com
ժҪ:Ϊ�о�����ģʽ����ɿ�ϵͳ���м�ֵ��˶����ɣ���������������������5 kmӲ��ˮ������ϵͳ��������ģ�ͣ��������е�ȫ�����㷨�����3�ֿ��ܵı���ģʽ(Բ�Ρ����Ρ��۷�����ģʽ)��������ͬ����ģʽ�������ٶȡ��ϰ��������м���˶����Ե�Ӱ�죬������ģ��ʵ���о����о�����������м�ֵ��˶���Ҫ�����ڼ����ǰ���ķ����ϣ�����ʼ�㸽�����۷�����ģʽ�£����Ͻ���ʱ�м��λ�Ƶ����ֵ��3.0 m����Բ�κ;��α���ģʽ�ĸߣ��������ٶȴ�0.4 m/s���ӵ�1.0 m/sʱ���м��λ��ƽ��ֵ�����ӷ���С��0.2 m���ϰ��������м���˶�����Ӱ��ϴ��м��λ��ƽ��ֵ�����ֵ���ϰ����������Ӷ����٣��ڽ��вɼ�·���滮ʱ������ʹ�ϰ���������200 m����ˣ��Լ�������б����㷨���ʱ������Ҫ�����㷨�Ŀ����ԣ���Ҫ��������ϵͳ�ڲ�ͬ����ģʽ�¶���ѧ���ԡ�
[3] ����, ����ɭ, ������, ��. ����ɿ��������ܶ������Ե���ֵ�о�[J]. ����, 2001, 19(1): 59-64.
[4] ��, �Ԫ, ���. ��ɿ�ϵͳ���������ܵ���ֵģ��[C]//ȫ����ҵ�뻷��������ѧ����. ����, 2001: 199-205.
[5] �캣��, ����, �Ⲩ, ��. ���ܺͿ���ɿ�ϵͳ��Ӱ����ɷ���[J]. ���������, 2017, 34(1): 231-235, 287.
[6] �캣��, ���廪. ��ɿ�����ϵͳ���˶����غɷ���[J]. ���ϿƼ���ѧѧ��(��Ȼ��ѧ��), 2005, 20(1): 21-24.
[9] ���, ���پ�. ��ɿ�����ϵͳ����ѧ��ģ������������ҵ���̿��ٷ������[J]. ��е����ѧ��, 2012, 48(9): 79-88.
[11] ���, �Ž�, ����, ��. ���ڶ��嶯��ѧģ�ͼ��ɵ���ɿ�ϵͳ��������[J]. ��е����ѧ��, 2017, 53(4): 155-160.
[13] ����, ����. ��ɿ�ϵͳ�����ģ��[J]. ʵ�����о���̽��, 2006, 25(1): 49-52.
[16] ʷ��ѩ, ��Ӣ��, �ް���, ��. ������Ⱥ�㷨��ɿ�����˹���·���滮[J]. ����, 2008, 26(2): 119-123.
[17] ����, ����. ����LabVIEW���������ϵ�������ϵͳ���[J]. ��е���������, 2018(8): 159-161, 165.
[19] �Ⲩ, ��С��, �ﳬ, ��. ��ɿ�ϵͳˮ���������о�����[J]. �й��촬, 2016, 57(3): 204-214.
[21] ����. 1000������ɿ�ϵͳ���Ż��չ��̵����������о�[D]. ��ɳ: ���ϴ�ѧ���繤��ѧԺ, 2004: 45-54.
[22] �ؾ���, ����, �˽���. �����Բ�ͬ��û���ˮƽԲ�����غɷ���[J]. �Ϻ���ͨ��ѧѧ��, 2018, 52(8): 938-945.
[26] ����. ����ADAMS����ɿ�ϵͳ����ģ��[J]. ��ɽ��е, 2006, 34(8): 26-27.
