
ֱ��Բ�����ִ�����Ƶ�ȫ���Ż�����
���پ�1������1��������2
(1. ���ϴ�ѧ ��ѧ��ͳ��ѧԺ������ ��ɳ��410083��
2. ���ϴ�ѧ ���繤��ѧԺ������ ��ɳ��410083)
ժ Ҫ��
���Ż���Ʒ�����ȫ���Ż�����IJ��㡣���һ���غ�ϵ��һ����ֱ��Բ�����ִ�����Ƶ�����Ż����⣬�����������Ż�ģ�͡�����ģ���ص�ķ��������ñ��������ȡ��Ȼ�����ı����任��������ԭ����������ȼ۵�ת��Ϊ����ϱ��������Թ滮ģ�ͣ������һ������ϱ��������Թ滮�����ȫ���Ż�����������һϵ�з���Ӧ�����о����͵�ֱ��Բ�����ִ����Ż���ư�����������������Ż������Ƚϡ������������ȫ���Ż������õ��Ĵ�С���ֶַ�Բ�����С�����������õ���Բ������ֵ��
�ؼ��ʣ�
���ִ����������Թ滮����ϱ�����ȫ���Ż���
��ͼ����ţ�TH122��TH132.41��O221.1 ���ױ�־�룺A ���±�ţ�1672-7207(2013)07-2736-08
Global optimization design of spur gear drive
ZHANG Shaojun1, WAN Zhong1, LIU Guanglian2
(1. School of Mathematics and Statistics, Central South University, Changsha 410083, China;
2. School of Mechanical and Electronic Engineering, Central South University, Changsha 410083, China)
Abstract: The deficiency of global optimization for the current optimal design of gear drive was analyzed. A nonlinear optimization model was constructed to minimize the volume of spur gear drive with a fixed load coefficient. Based on the analysis on the structural characteristics of the model, the original nonlinear optimization problem was converted into a binary linear programming with some continuous and discrete variables by a method of variable transformation. Then��a class of global optimization methods for linear programming with mixed variables were developed. The proposed method was applied into a typical case study on the optimal design of gear drive, and compared with the existent ordinary optimization methods available in the literature. The obtained results show that the optimal total volumes of pinion and wheel by the global optimization method are smaller than the rounded optimal values by the other four local methods.
Key words: gear drive; nonlinear programming; mixed variable; global optimization
���ִ����ǻ�е����������Ҫ��һ�ഫ������ʽ������Ӧ��ʮ�ֹ㷺�����ִ������Ż����ּ�ڽ�Լ��Դ�����������ͳɱ������Ƴ��ֹ������ܡ����ڳ���Ӧ����������ṹ�Ż������ܲ����ϴ�ľ��ú����Ч�档�����������кܶ����Գ��ִ�������Ż����й㷺�о�����Щ�����Գ��֡��������ܵ����(����)��С���ܵij��������ľ������ΪĿ�꺯��[1-2]��Ҳ���Գ�������ΪĿ��[3]�����������ǻ�����ʶ����ǿ���Լ�����ȶ�̬���ܵĸ���ΪĿ�꣬�ѳ�Ϊ�����Ż��о�һ���µĽ��㣬��������[4]�����⣬����һЩ���״�ģ����ɿ����Ż��ĽǶ�����Ƴ��ִ���[5-6]���ڳ��ֻ����Ż�����У�Ӧ�����ഫͳ�Ż�����������ö�ٷ��������η�����ţ�ٷ������������ȵȡ�ö�ٷ�ֻ��һ�ֽ��Ʒ���������Ч�ʺ;��Ⱥܵ͡������η�����ţ�ٷ����������������ھֲ��Ż��㷨����Ȼ���������㷨���Ƚϳ��죬�����ڳ��ִ����Ż�������������Ż���������ֻ����þֲ����Ž⡣������������һ��ȫ��������������������ʽ�㷨�ڳ��ֻ����Ż��е�Ӧ��Խ��Խ�ࡣFaruk��[1]���Ŵ��㷨(GA)��ֱ���ִ�����ƽ����Ż���������������֮�Աȵ�ö�ٷ�������Savsani��[2]�ֱ����ģ���˻�(SA)������Ⱥ�Ż�(PSO)�㷨��һ����ֱ���ִ�������������Ż�������GA�����бȽϣ������ʾ��SA��PSO�Ż��������һ�£�������GA�Ż������PSO�����SA��GA�������ٶȸ��졣Lucian��[7]��һ���������֡��ᡢ��С����ܷ�Ȼ��ڹ���24��77��Լ���Ķ���б���ּ������������Ż������У����һ�����ν����㷨���Ż������⡣��������ʽ�㷨��Ȼ�������ݶ���Ϣ������ȫ�֡����е��Ż����ܣ�Ϊ������ģ�������Ż������ṩ���µ�˼·���ֶ�[8]�����������������������֤�����õ��Ľ�һ����ȫ�����Ž⡣���г��ִ����Ż���Ƶķ������ܴ������ϱ�֤���ȫ�������ԡ������е�ȷ����ȫ���Ż��㷨���֧���編����亯����������ˮƽ���㷨�Ⱦ����㷨�����Ͻ��������Ƕ������������Ż�����չ����[9]����һ����Ż����⣬�������κ�һ���ձ����õ�ȫ���Ż��㷨�����ִ���Ӧ�ù㷺�����Ż�ģ����Ժܳ��죬�о����ĸ�Чȷ����ȫ���Ż��㷨����������Ӧ�ü�ֵ���ܴ�����Ҫ����������Ż�ģ���ص�Ϊ��������ǡ���������о����ڵ�һ���ձ鲻�㡣�����Zhang��[10-11]��V����������Ż���������������Ȿ���ṹ������һ��ȷ����ȫ���Ż��㷨 ���� ����ֵ�߶��㷨��������[10-11]��˼�����ƣ��������һ��ֱ��Բ�����ִ�������Ż����⣬����ʵ����ƻ��������Ƚ�����������ķ������Ż�ģ�ͣ�Ȼ�����ģ���ص㣬������ʵı����任��������ԭ����������ȼ۵�ת��Ϊ���Թ滮������⣬�������Ʊ����Ķ����ԣ����һ�ֺ���Ԫ��ϱ��������Թ滮�����ȫ���Ż����������������ģ�ͺ���ⷽ��Ӧ����һ�����ͳ��ִ������ʵ��������4�ֳ����Ż������Ľ�����бȽϣ�����֤����Ч�Ժ�ʵ�ü�ֵ��
1 ֱ��Բ�����ִ����Ż����ģ��
1.1 ȷ����Ʊ�����Ŀ�꺯��
�����ڸ����Ĵ��ݹ��ʺʹ����������£����ָ������С���������ᣬ�ɱ��ͣ��ṹ���յ��ŵ㣬��ˣ�ѡȡ��С���ֶַ�Բ�����֮����СΪĿ�꺯����ѡ��ģ��m (mm)�������ֳ���Z1�ͳݿ�ϵ����d��Ϊ��Ʊ�������Ϊx = (x1, x2, x3)T=(m, Z1, ��d)T����Ŀ�꺯��Ϊ
 (1)
(1)
���У�iΪ�����ȡ�
1.2 ����Լ������
Լ��������Ҫ��������Լ��������Լ����
1.2.1 ����Լ��
(1) ģ����Լ����
 (2)
(2)
(2) �����ֳ�����Լ����
 (3)
(3)
(3) �ݿ�ϵ����Լ����
 (4)
(4)
���У�C1~C6ΪԼ�������еij�ϵ����
1.2.2 ����Լ��
(1) ����Ӵ�ƣ��ǿ�ȵ�����
��������[12]����
 (5)
(5)
���У�ZHΪ����ϵ�����Ա�ֱ��Բ�����֣�ZH=2.5��ZiΪ������ϵ���� ��ZEΪ����Ӱ��ϵ��(
��ZEΪ����Ӱ��ϵ��( )�����ڳ��ֳ��õĶֲ��ϣ�ZE=189.8��T1Ϊ�������ִ��ݵ�Ť��(N��mm)��K1Ϊ�غ�ϵ����
)�����ڳ��ֳ��õĶֲ��ϣ�ZE=189.8��T1Ϊ�������ִ��ݵ�Ť��(N��mm)��K1Ϊ�غ�ϵ���� Ϊ���ýӴ�Ӧ��(N/mm2)��
Ϊ���ýӴ�Ӧ��(N/mm2)��
 ��
�� ��
�� �ֱ�Ϊ��С���ֵ����ýӴ�Ӧ��(N/mm2)��
�ֱ�Ϊ��С���ֵ����ýӴ�Ӧ��(N/mm2)��
(2) �ݸ�����ƣ��ǿ�ȵ�����
��������[12]����
 (6)
(6)
 (7)
(7)
���� ��
�� �ֱ�Ϊ��С���ֵ���������Ӧ��(N/mm2)��K2Ϊ�غ�ϵ����
�ֱ�Ϊ��С���ֵ���������Ӧ��(N/mm2)��K2Ϊ�غ�ϵ���� ��
�� �ֱ�Ϊ�غ������ڳݶ�ʱ��С���ֵij���ϵ����
�ֱ�Ϊ�غ������ڳݶ�ʱ��С���ֵij���ϵ���� ��
�� �ֱ�Ϊ�غ������ڳݶ�ʱ��С���ֵ�Ӧ������ϵ������������[13]���У�
�ֱ�Ϊ�غ������ڳݶ�ʱ��С���ֵ�Ӧ������ϵ������������[13]���У�
YFYS = 7.377686 Z�C0.322 312��1.094062 Z0.116 206=
8.071646 Z�C0.206 106��17��Z��25
YFYS=4.333869 Z�C0.159 188��1.175585 Z0.094 493=
5.0948314 Z�C0.064 695��25��Z��60
YFYS=2.859508 Z�C0.057 395��1.276 Z 0.0738=
3.648732 Z0.016 405��60��Z��300
���У�Z��ʾ������YF��YS�ֱ�Ϊ�غ������ڸó��ֳݶ�ʱ�ij���ϵ����Ӧ������ϵ����
��ʽ(5)�У��غ�ϵ�� ����ʽ(6)��(7)�У��غ�ϵ��
����ʽ(6)��(7)�У��غ�ϵ�� �����У�KAΪ�������ϵ����KvΪ����ϵ����
�����У�KAΪ�������ϵ����KvΪ����ϵ���� ��
�� �ֱ�Ϊ����Ӵ�Ӧ���ͼ�������Ӧ��ʱ�ijݼ��غɷ���ϵ������
�ֱ�Ϊ����Ӵ�Ӧ���ͼ�������Ӧ��ʱ�ijݼ��غɷ���ϵ������ ��
�� �ֱ�Ϊ����Ӵ�Ӧ���ͼ�������Ӧ��ʱ�ij����غɷֲ�ϵ��������Щϵ���У�KA�ɳ��ֵĹ�������״����������Kv������������ֵ�ģ�����������ݿ��Լ�����ת�ٵȲ������[14]�������ھ��������λ��߾�����ϸ�ܺϣ���ʹ�غ��س�����ȷֲ������Σ���ȡ==1���Ծ����������εij��֣�����ȡ==1[15]�����ڸ߾��ȳ��֣������õİ�װ�Ͷ��о����Լ����ʵ��������£�Kv��ȡֵ�仯��Χ��С��Ϊ1.0~1.1[14]�����ĵ��о�����Ϊ���ྭ������ͳ������Σ����Ƚϸߵ�ֱ��Բ�����ִ��������غ�ϵ��K1��K2��Ҫ��KA�������ɽ�����ΪK1=K2=K������KΪһ������
�ֱ�Ϊ����Ӵ�Ӧ���ͼ�������Ӧ��ʱ�ij����غɷֲ�ϵ��������Щϵ���У�KA�ɳ��ֵĹ�������״����������Kv������������ֵ�ģ�����������ݿ��Լ�����ת�ٵȲ������[14]�������ھ��������λ��߾�����ϸ�ܺϣ���ʹ�غ��س�����ȷֲ������Σ���ȡ==1���Ծ����������εij��֣�����ȡ==1[15]�����ڸ߾��ȳ��֣������õİ�װ�Ͷ��о����Լ����ʵ��������£�Kv��ȡֵ�仯��Χ��С��Ϊ1.0~1.1[14]�����ĵ��о�����Ϊ���ྭ������ͳ������Σ����Ƚϸߵ�ֱ��Բ�����ִ��������غ�ϵ��K1��K2��Ҫ��KA�������ɽ�����ΪK1=K2=K������KΪһ������
ͬʱ���������һ��ϱ����Ż����⣬������������������ͷǹ�����ɢ�������Ż����⡣��x1�ʦ���x2��Z+��x3��R+(����ʾ����[C1, C2]�ڵı�ģ���ļ��ϣ�Z+��ʾȫ������������R+��ʾ��ʵ����)��
����������ֱ��Բ�����ִ������������Ż�ģ��Ϊ��

s.t. ʽ(2)~(7)
 (8)
(8)
���У� ��ʾ��ά�Ǹ�ŷ����¿ռ䡣
��ʾ��ά�Ǹ�ŷ����¿ռ䡣
2 �����任���ȼ۵Ļ�ϱ������Թ滮ģ��
ģ��(8)��һ�������Ż�ģ�ͣ���Ȼ�������࣬������û��һ��ͳһ��ȫ���Ż����������͵ĸ�Ч�Ż��㷨�������ж��ι滮������һ��ֻ�ܱ�֤�õ���ֲ����Ž⡣�������ʵ���Ż����������ʽ�㷨�����Ŵ��㷨������Ⱥ�㷨����Ȼ�п��ܵõ���ȫ�����Ž⣬�������������ϴ��������ϻ���������ȫ�������ԡ�������Щ���ǣ��ڴ����һ�ֻ�������(8)�ṹ�����ı����任���������ܰ�ԭ���ķ���������ȼ۵�ת��Ϊ����������⡣
���ȣ��� =
= ����
���� ����Ŀ���Լ��������ȡ��Ȼ��������ģ��(8)�ȼ����������⣺
����Ŀ���Լ��������ȡ��Ȼ��������ģ��(8)�ȼ����������⣺
min W(y)=ln +3y1+3y2+y3
+3y1+3y2+y3
s.t. 3y1+3y2+y3��A1
3y1+2.206106y2+y3��A2��17��x2��25
3y1+2.064695y2+y3��A3��25��x2��60
3y1+2.064695y2+y3��A4��25��ix2��60
3y1+1.983595y2+y3��A5��60��ix2��300
lnC1��y1��lnC2 (9)
lnC3��y2��lnC4
lnC5��y3��lnC6
yi = lnxi��i = 1, 2, 3
x = (x1, x2, x3)T�ʦ���Z+��R+
����
 ��
��
 ��
��
 ��
��
 ��
��
 ��
��
��������ģ��(9)�����2��Լ��������������������һ����yΪ���߱��������Թ滮��
ע1���κ�һ��������Թ滮������㷨������������������������(8)�����͵ļ����㷨���¡�
����1��ѡ�����Թ滮���������������������(9) (���������2��Լ��)���������Ž�Ϊy*��
����2����y*����

����3���� Բ�������ý���������Ʒ�����
Բ�������ý���������Ʒ�����
ע2��ע1�ж����Թ滮�����������Բ���ķ�����һ�ֲִڵķ���������ʵ���������÷������õ���ԭ��������Ž���ʵ�ʻ�ϱ���ȫ�����Ž��Զ��������ķ��������ԭ��ϱ����Ż������ȫ�����Žⷨ����Ȼ�ɽ�����������������ɢ�����������������������滮��������������[16]���������������滮����һ��ֻ�ܸ���һ��ȫ�����Ž⣬�����ҵ��������Ž⣬������������Ը��ӡ�����ܵõ�������������ȫ��������Ʒ���������δ������о��ɹ���
3 ��ϱ������Թ滮�����ȫ���Ż�����
Ϊ����������(8)�Ļ�ϱ���ȫ�����Ž����Ч��������������3��������
����1 ���ϱ������Թ滮��Ŀ�꺯��Ϊ
min F(x) = B1x1+B2x2+��+Bnxn
���У�B1, B2, ��, BnΪ�������������Ϊ���������Թ滮�����������ռ��е�ȫ�����Ž�ΪP=(xP 1��xP 2������xP n)T�������P����Ŀ�꺯���������ij�ƽ���ƽ�еij�ƽ��пɱ�ʾΪ��B1x1+B2x2+��+Bnxn-D��0�����У�D=B1xP 1+B2xP 2+��+BnxP n�����ϱ���ȫ�����Ž�ΪP*=(xP* 1, xP* 2, ��, xP* n)T������е�P*��еľ����������
 (10)
(10)
֤����ʽ(10)�ȼ���
 ��
��
����һ���ϱ��������Ż�����������ѣ������ڶ�Ԫ��ϱ��������Ż����⣬����ͨ������2����������⡣
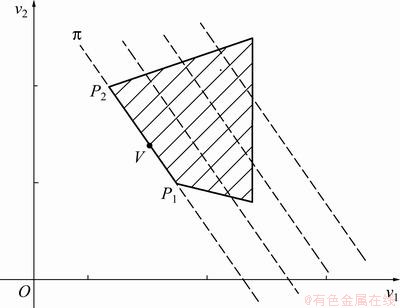
����2 ��ͼ1��ʾ�������Ԫ��ϱ������Թ滮���⣺
min F(V) = B1v1+ B2v2
B1��B2����
s.t. V�ʦ�����Ϊ��Ԫ��ϱ����ռ��еĿ����� (11)
�����������ռ��е�ȫ�����Ž�ΪP�㣬��ʧһ���ԣ���v1Ϊ����������v2Ϊ��ɢ�������Ǿ�����P����Ŀ�꺯��ֱ�ߴ�ƽ�е�ֱ��Ϊ�У��迿��ֱ�ߦ�һ��Ŀ�����߽����ϣ��ֱ���v2�������������������P������Ļ�ϱ������н�ΪV(1)=(v1(1)��v2(1))��V (2)=(v1(2)��v2(2))������Ż�����Ļ�ϱ���ȫ�����Ž�Ϊ

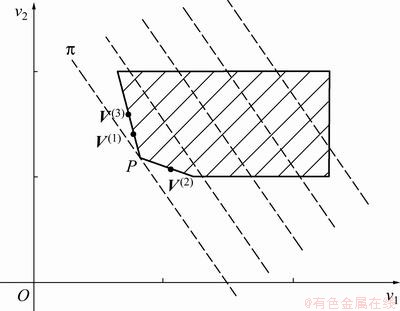
ͼ1 ����2�ļ��α�ʾ
Fig.1 Geometric representation for Theorem 2
֤���������Թ滮����֪����P����ɿ����������һ���㡣��ʧһ���ԣ���F(V(1))= min{ F(V (1)), F(V(2))}�������÷�֤��֤����
������һ��ϱ���ȫ�����Ž�V(3)��(v1(3)��v2(3))�� V(1)������У�
(a) v2(3)��v2(1)��v1(3)��v1(1)��
��(b) v2(3)��v2(2)��v1(3)��v1(2)��
��(c) v2(3)��v2(1)������v2(3)��v2(2)��
��(a)����������ͼ��֪�����е�V (3)��еľ�����ڵ�V (1) ��еľ��룬˵��F(V (3))��F(V (1))�������ì�ܣ�
��(b)������ͬ���ɵ�F(V (3))��F(V(2))��F(V(1))�������ì�ܣ�
��(c)��������ʧһ���ԣ�����v2(3)��v2(1)����ֱ��v2��v2(3)�뿿��ֱ�ߦ�һ��Ŀ�����߽�Ľ���ĺ�����Ϊv1(3)*����v1(3)��v1(3)*�������
F(v1(3)��v2(3))��F(v1(3)*��v2(3))
����V (3)�ڻ�ϱ����ռ��е�ȫ�������Լ�����ì�ܣ���ˣ�v1(3)��v1(3)*������ ��
�� ��������ʾ��P���V(3)�ľ��룬����
��������ʾ��P���V(3)�ľ��룬����
Prjn(PV (3))��Prjn(PV (1))
���У�Prjn(PV (3))��ʾ�߶�PV (3)�����ֱ�ߦеĴ���ij��ȣ���˵��F(V (3))��F(V (1))���������ì�ܡ���˶�����֤��
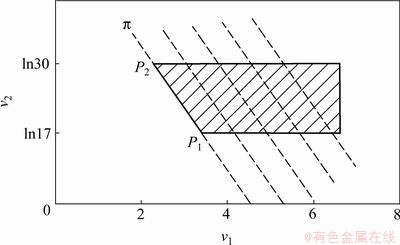
����3 ��ͼ2��ʾ�������Ԫ��ϱ������Թ滮����(11)�����������ռ��е�ȫ�����Ž�����Ŀ�꺯��ֱ�ߴ�ƽ�е��߶�P1P2�ϵ����е㣬��
(1) ��ϱ���ȫ�����Ž⼴Ϊ�߶�P1P2�ϵĻ�ϱ������н⣬�һ�ϱ���ȫ�����ź���ֵ����������ȫ�����ź���ֵ��ȣ�
(2) ���߶�P1P2��û�л�ϱ������н⣬���谴����2��õĶ�Ӧ���߶�P1P2������һ����������ȫ�����Ž�P�Ļ�ϱ���ȫ�����Ž�ΪVP����ù滮����Ļ�ϱ���ȫ�����Ž�Ϊ
V*��VP
ͼ2 ����3�ļ��α�ʾ
Fig.2 Geometric representation for Theorem 3
֤���������߶�P1P2�ϵĻ�ϱ������н���ԭ��������ȫ�����Ž⼯֮�У���ˣ����DZ�Ϊ��ϱ���ȫ�����Ž⡣�ּ��軹�в����߶�P1P2�ϵĻ�ϱ���ȫ�����Ž� ����ͼ��֮������F()��F(V)(���У�VΪ�߶�P1P2�ϵ�����һ����ϱ������н�)��������費���������߶�P1P2�ϵĻ�ϱ������н�����������ȫ�����Ž�ͬ��ֱ�ߦ��ϣ������ӦĿ�꺯��ֵ��ȡ���˽���(1)������
����ͼ��֮������F()��F(V)(���У�VΪ�߶�P1P2�ϵ�����һ����ϱ������н�)��������費���������߶�P1P2�ϵĻ�ϱ������н�����������ȫ�����Ž�ͬ��ֱ�ߦ��ϣ������ӦĿ�꺯��ֵ��ȡ���˽���(1)������
����2���ɶ���2ֱ��֤�á�
����ģ��(9)�����ֽ���ת���ɶ�Ԫ��ϱ������Թ滮��ʽ���Ӷ������ö���2�Ͷ���3��⡣
��ģ��(9)�У���V=(v1��v2)T=(3y1+y3��y2)����ģ��(9)ת��Ϊ��
min W(V)=ln+v1+3v2
s.t. v1+3v2��A1
v1+2.206106 v2��A2��17��x2��25
v1+2.064695 v2��A3��25��x2��60
v1+2.064695 v2��A4��25��ix2��60
v1+1.983595 v2��A5��60��ix2��300
3lnC1+lnC5��v1��3lnC2+lnC6
lnC3��v2��lnC4�� (12)
v1=3y1+y3��v2=y2��
yi=lnxi��i=1, 2, 3��
x=(x1, x2, x3)T�ʦ���Z+��R+
���ȥ��ģ��(12)�еĺ�3��Լ������õ�����2�����߱��������Թ滮���⡣�ɶ���2�Ͷ���3�ɽ��ģ��(12)�Ļ�ϱ���ȫ�����Ž�V*��(v1*, v2*)T��
�����������⣺
v1*=3y1+y3
lnC1��y1��lnC2
lnC5��y3��lnC6 (13)
yi��lnxi��i��1, 3
(x1, x3)T�ʦ���R+
�ɽ�һ������ֽ�Ϊ����2�������⣺
min 3y1+y3
s.t. 3y1+y3-v1*��0
lnC1��y1��lnC2 (14)
lnC5��y3��lnC6
yi=lnxi, i=1, 3
(x1, x3)T�ʦ���R+
��
min -3y1-y3
s.t. 3y1+y3-v1*��0
lnC1��y1��lnC2 (15)
lnC5��y3��lnC6
yi=lnxi; i=1, 3
(x1, x3)T�ʦ���R+
������2�Ͷ���3�����2��������Ľ⣬���ǵĽ�����Ϊ������(13)�Ľ⡣
4 ʵ����ư����о�
����ǰ���������⺬��ϱ��������Թ滮�����ȫ��Ѱ�ŷ������Ż�һ����͵�ֱ���ִ���������⣬����������ͨ�Ż���Ʒ������бȽϡ�
�����1�Ա�ʽֱ��Բ�����ִ�������֪�������ֵ�����Ť��T1=1��105 N��mm��������i=4����������жԳ��ֶԳƲ��á�С���ֲ���45�֣����ʣ�����Ӳ��Ϊ250~280������Ӵ�ǿ�ȵ�����Ӧ�� =680 N/mm2���ݸ�����ǿ�ȵ�����Ӧ��
=680 N/mm2���ݸ�����ǿ�ȵ�����Ӧ�� =288 N/mm2������ֲ���45�֣����ʣ�����Ӳ��220~250 HBS������Ӵ�ǿ�ȵ�����Ӧ��
=288 N/mm2������ֲ���45�֣����ʣ�����Ӳ��220~250 HBS������Ӵ�ǿ�ȵ�����Ӧ�� =550 N/mm2���ݸ�����ǿ�ȵ�����Ӧ��=204 N/mm2��Ҫ��ṹ���ա�����ó��ָ�Ϊ�����������κͳ������εĸ߾��ȳ��֣����غ�ϵ��KΪ1.21��
=550 N/mm2���ݸ�����ǿ�ȵ�����Ӧ��=204 N/mm2��Ҫ��ṹ���ա�����ó��ָ�Ϊ�����������κͳ������εĸ߾��ȳ��֣����غ�ϵ��KΪ1.21��
���ݸ����������������[15]�ɵ����Ż�ģ��Լ�������еij�ϵ��ֵ���1��ʾ��
��1 ʵ����������в�����ȡֵ
Table 1 Values of parameters in real design problem

������ϵ��ֵ����ģ��(12)����ʵ����ȫ��Ѱ��ʾ��ͼ��ͼ3��ʾ��ͼ3����Ӱ����Ϊ���Ż�����Ŀ�����һ��ƽ�����߱�ʾ��ͬȡֵʱ��Ŀ�꺯������Ŀ�������ƶ��������������˱߽�����ʱģ��(12)��Ŀ�꺯��ȡ����Сֵ����ʱ��ʵ�������������ռ��е�ȫ�����Ž⼴Ϊ���߶�P1P2�еĸ��㣬�ɱ�ʾΪ

 (16)
(16)
�����߶�P1P2��ʾģ��(12)��һ��Լ����һ���ֱ߽��ߣ���˵����һ��Լ��������Ӵ�ǿ�ȵ�����Լ���Ǹ��Ż��������ЧԼ����
ͼ3 ȫ��Ѱ��ʾ��ͼ
Fig.3 Diagram for global optimization method
ͨ��ʽ(16)�����Խ���߶�P1P2�ϵ����л�ϱ������н����2��ʾ���ɶ���3֪����Щ���н⼴Ϊ��ʵ����ȫ���ϱ���ȫ�����Ž⣬��Ӧ������ֵ��Ϊ3.006 2��106��
������������Ż��У������ÿ�ѧ�빤�̼���������(��MATLAB)������������Ż�ģ��[17]������Ӧ��ijЩ�ֲ��Ż��������緣���������������ֻ���[18]�������Ӧ���Ż�ģ�͡�����Щ����ֱ��Ӧ�������������ư��������������3��ʾ��������Щ�ֲ��Ż�����ֻ����������������Ż�ģ�ͣ�Ϊ�ˣ��Ѽ���������Բ�������õ�ʵ�ʴ�����Ʒ�������3��ʾΪ����4�ֳ����Ż��㷨���Բ��ǰ������Ž⼰��Ӧ������Ŀ�꺯��ֵ��
��2 ȫ���Ż������������
Table 2 Results from global optimization method

��3 4�ֳ����Ż��㷨��ȫ���Ż������Ƚ�
Table 3 Comparison between four ordinary methods and global optimization method
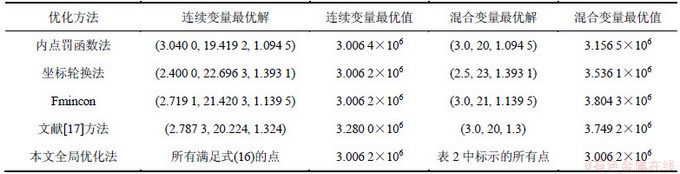
��3�У�Fmincon��ָ����MATLAB�Ż��������е�Fminconָ�����ķ��������������ֻ�����Fmincon������ʱ�����ڲ�ͬ�ij�ʼֵ���ɽ�ò�ͬ�������������Ž⣬������Ӧ��Ŀ�꺯������ֵ��Ϊ3.006 2��106�����뱾��ͼ������ð���ʱ�õ������������Ž���ĿΪ�������Ľ����һ�¡�
ע���3����2�־ֲ��Ż��㷨��������������ֵ�뱾��ȫ���Ż���������ϱ�������ʱ�õ���Ŀ�꺯������ֵ��ͬ������Ҫ�������ڣ��ֲ��Ż��㷨���ܱ�֤���ȫ�������ԡ���ʵ�ϣ��ܹ�֤����ģ��(8)��Ŀ�꺯��F(x)��R3 +����Hessian���һ����������ʽ��Ϊ��������������ʽ��Ϊ������F(x)��R3 +���Ƿ�����������ζ���κξֲ��Ż��㷨�����������ϱ�֤���õ��Ľ������ȫ�������ԡ�ͬʱ���ֲ��Ż��㷨�õ��Ľ���뾭��Բ�������ɱ�3��ʾ���֪����Բ����Ҫ���ڱ��ķ�����õĻ�ϱ������Ž⡣�����������ȫ��Ѱ�ŷ�������õ����Žⲻ��ҪԲ������ֱ������ʵ�ʹ�������Ż����Ӷ������Ʒ����Ŀɿ��ԣ������ܹ��õ�����ȫ�����Ž⣬��Ϊ�����Ż���Ƴɱ��ṩ����Ҫ���ݡ�
5 ����
(1) ���һ���غ�ϵ��һ����ֱ��Բ�����ִ���������Ż�������⣬��������ѧģ�͡�����һ�ֱ����任��������ԭ�������Ż�ģ��ת�����˺���ϱ��������Թ滮ģ�͡�
(2) ��ƻ�ϱ������Թ滮�����ȫ���Ż�������
(3) ���÷���Ӧ�����о����͵�ֱ��Բ�������Ż���ư������ں���������������ɢ�����Ŀ��������������ȫ��������Ʒ���������ͨ�Ż������Ƚϣ����������ȫ��Ѱ�ŷ����������оֲ��Ż�������
�ο����ף�
[1] Faruk M, Tamer B, Kurtulus B, et al. Optimization of module, shaft diameter and rolling bearing for spur gear through genetic algorithm[J]. Expert Systems with Applications, 2010, 37(12): 8058-8064.
[2] Savsani V, Rao R V, Vakharia D P. Optimal weight design of a gear train using particle swarm optimization and simulated annealing algorithms[J]. Mechanism and Machine Theory, 2010, 45(3): 531-541.
[3] ����, ��һ֪. ����Բ�����ִ�����ϵ���Ż�����㷨̽��[J]. �Ĵ�����ѧԺѧ��: ��Ȼ��ѧ��, 2009, 22(2): 105-107.
GU Yong, GAO Yizhi. Three cylindrical gear series of optimal design of algorithms[J]. Journal of Sichuan University of Science & Engineering: Natural Science Edition, 2009, 22(2): 105-107.
[4] Faggioni M, Samani F S, Bertacchi G, et al. Dynamic optimization of spur gears[J]. Mechanism and Machine Theory, 2011, 46(4): 544-557.
[5] ����, Ф־��. ���ִ���ģ���ɿ����Ż����[J]. ��е����, 2006, 30(4): 42-43, 46.
PENG Cheng, XIAO Zhixin. Fuzzy reliability optimal design of gear transmission[J]. Journal of Mechanical Transmission, 2006, 30(4): 42-43, 46.
[6] ҦӢ��, ������, Ī�ƻ�, ��. ����ģ�����ۺ��Ŵ��㷨�ĺ��ճ��ֿɿ����Ż����[J]. �Ϻ���ѧѧ��: ��Ȼ��ѧ��, 2004, 10(4): 362-366.
YAO Yingzi, FAN Junxing, MO Yunhui, et al. Reliability optimization of aviation gears based on fuzzy theory and genetic algorithm[J]. Journal of Shanghai University: Natural Science Edition, 2004, 10(4): 362-366.
[7] Lucian T, Ovidiu B, Cornel S, et al. Automated optimal design of a two-stage helical gear reducer[J]. Struct Multidisc Optim, 2010, 42(3): 429-435.
[8] Rao R V, Savsani V J. Mechanical design optimization using advanced optimization techniques[M]. London: Springer-Verlag, 2012: 1-4.
[9] Floudas C A, Gounaris C E. A review of recent advances in global optimization[J]. Journal of Global Optimization, 2009, 45(1): 3-38.
[10] ZHANG Shaojun, WAN Zhong, LIU Guanglian. Global optimization design method for maximizing the capacity of V-belt drive[J]. Science China: Technological Sciences, 2011, 54(1): 140-147.
[11] ���پ�, ����, ������. V��ƣ���������ȫ���Ż����[J]. �й���е����, 2011, 22(4): 403-407.
ZHANG Shaojun, WAN Zhong, LIU Guanglian. Global optimization design of V-belt fatigue life[J]. China Mechanical Engineering,2011, 22(4): 403-407.
[12] �����, ������. ��е���[M]. 7��. ����: �ߵȽ���������, 2001: 190-200.
PU Lianggui, JI Minggang. Mechanical design[M]. 7th ed. Beijing: Higher Education Press, 2001: 190-200.
[13] ���IJ�. �����ͻ�е�㲿���Ż����[M]. ����: ��е��ҵ������, 1990: 229-232.
WANG Wenbo. Optimal design of mechanism and mechanical elements[M]. Beijing: China Machine Press, 1990: 229-232.
[14] GB/T 3480��1997, ������Բ�����ֳ����������㷽��[S].
GB/T 3480��1997, Calculation methods of load capacity for involute cylindrical gears[S].
[15] ��е����ֲ��ί��. ��е����ֲ�: ���ִ���[M]. ����: ��е��ҵ������, 2008: 43-54.
Mechanical Design Handbook Editorial Board. Mechanical design handbook: Gear drive[M]. Beijing: China Machine Press, 2008: 43-54.
[16] �Ű���, ͯС��. ��ϱ����Ż���Ƶ����ͻ�����[J]. ������ҵ��ѧѧ��, 2003, 21(5): 548-551.
ZHANG Anning, TONG Xiaoyan. On better optimization through turning mixed variables into completely-integer ones[J]. Journal of Northwestern Polytechnical University, 2003, 21(5): 548-551.
[17] ����÷, ��ѧ��. ���ִ�����ģ���Ż����[J]. ������ҵ��ѧѧ��, 2004, 16(3): 48-52.
HAN Xiumei, LUO Xueke. Research on fuzzy optimization of gear-driven system[J]. Journal of North China University of Technology, 2004, 16(3): 48-52.
[18] ��Ω��. ��е���Ż����[M]. 2��. ����: �廪��ѧ������, 1994: 65-70, 211-223.
LIU Weixin. Mechanical optimal design[M]. 2nd ed. Beijing: Tsinghua University Press, 1994: 65-70, 211-223.
(�༭ ������)
�ո����ڣ�2012-06-28�������ڣ�2012-08-20
������Ŀ��������Ȼ��ѧ����������Ŀ(71221061, 70921001)
ͨ�����ߣ�����(1966-)���У����������ˣ����ڣ������Ż�������Ӧ���о����绰��18684928167��E-mail: wanmath@163.com
ժҪ���������г��ִ����Ż���Ʒ�����ȫ���Ż�����IJ��㡣���һ���غ�ϵ��һ����ֱ��Բ�����ִ�����Ƶ�����Ż����⣬�����������Ż�ģ�͡�����ģ���ص�ķ��������ñ��������ȡ��Ȼ�����ı����任��������ԭ����������ȼ۵�ת��Ϊ����ϱ��������Թ滮ģ�ͣ������һ������ϱ��������Թ滮�����ȫ���Ż�����������һϵ�з���Ӧ�����о����͵�ֱ��Բ�����ִ����Ż���ư�����������������Ż������Ƚϡ������������ȫ���Ż������õ��Ĵ�С���ֶַ�Բ�����С�����������õ���Բ������ֵ��
[3] ����, ��һ֪. ����Բ�����ִ�����ϵ���Ż�����㷨̽��[J]. �Ĵ�����ѧԺѧ��: ��Ȼ��ѧ��, 2009, 22(2): 105-107.
[5] ����, Ф־��. ���ִ���ģ���ɿ����Ż����[J]. ��е����, 2006, 30(4): 42-43, 46.
[11] ���پ�, ����, ������. V��ƣ���������ȫ���Ż����[J]. �й���е����, 2011, 22(4): 403-407.
[12] �����, ������. ��е���[M]. 7��. ����: �ߵȽ���������, 2001: 190-200.
[13] ���IJ�. �����ͻ�е�㲿���Ż����[M]. ����: ��е��ҵ������, 1990: 229-232.
[14] GB/T 3480��1997, ������Բ�����ֳ����������㷽��[S].
[15] ��е����ֲ��ί��. ��е����ֲ�: ���ִ���[M]. ����: ��е��ҵ������, 2008: 43-54.
[16] �Ű���, ͯС��. ��ϱ����Ż���Ƶ����ͻ�����[J]. ������ҵ��ѧѧ��, 2003, 21(5): 548-551.
[17] ����÷, ��ѧ��. ���ִ�����ģ���Ż����[J]. ������ҵ��ѧѧ��, 2004, 16(3): 48-52.
[18] ��Ω��. ��е���Ż����[M]. 2��. ����: �廪��ѧ������, 1994: 65-70, 211-223.
