
�˼�δ֪ϵͳ���ı��μ���˲��㷨
��͢Ӣ������
(���ϴ�ѧ �����ѧ����Ϣ����ѧԺ������ ��ɳ��410083)
ժҪ��ͨ������һ�ִ���δ֪ϵͳ�����˲�ģ�ͣ��о����μ���˲�������һЩδ֪����������Ϣ�Ĵ������⣬����һ�ֻ����ƶ����ڵ�ϵͳ�������Ӧ��Ϸ����о�������������㷨����ں��˰����ڹ۲��е�ͳ����Ϣ�����»��µ��й���ѧ״̬�͵����������ṩ����Ϣ�������˹۲��쳣��������Ӱ��, ������α�������㾫�ȡ�
�ؼ��ʣ�
ϵͳ��������������μ�����������˲���
��ͼ����ţ�P22 ���ױ�־�룺A ���±�ţ�1672-7207(2011)03-0738-06
Filter algorithm in consideration of unknown systematic errors for deformation monitoring
ZUO Ting-ying, ZENG Lei
(School of Earth Science and Info-physics, Central South University, Changsha 410083, China)
Abstract: By constructing a filter models with unknown systematic error, slope��s physical information disposal was studied in the course of deformation monitoring filter calculation, and an adaptive fittings algorithm of systematic errors was given using moving windows. The results show that the method is fully fused with statistic information in the course of observation, dynamical state of slope slippage and geophysical information, it can eliminate the influence of abnormal observation and improve the precision of deformation parameter estimation.
Key words: systematic errors; slope; deformation monitoring; Kalman filtering
���µı��ι����ܶ�����ص�Ӱ��[1-2]�����ǶԱ��µ�����״̬��Ϣ����ʶ�ͼ���ȣ�����Ӱ�������λ�����ʣ�ʹ���µ�λ��ʱ�����߱��ֳ������ԣ��Ӷ�ʹ���¶�̬�������Ѷ����ӣ�������ģ�����ɻ����һ���̶ȵ����[3-8]�����������α�����������ȷ����������α��һ�ֺ����ķ����ǣ�����������ģ���Ƶ��α����뼸�ι۲������Ͻ������ģ�͡����ֻ��ģ��������Schwintzer[9]�����Bock ��[10-11]�Դ˽����˽�һ�����о������Ǹ��ݵ�������ģ�ͺ�ʵ�����ģ��֮��IJ���, Ӧ�ÿ��������������������Լ�������Ӱ�졣Segall��[12]�����ģ�͵�����������ͨ������ģ�ͼ����λ�ƺ�����ģ��Ԥ��λ��֮��IJ���ﵽ��С��ԭ��������α�������ʵ�ʸ��ٻ��µĶ�̬�仯�����У����Ǵ���һЩδ֪����������Ϣ������ͨ��ֻ��С�ı仯���ڹ̶��Ĺ۲���Ԫ����Կ����dz�������Χ��ij��������仯����ˣ����Բ��ù̶������ڵĹ۲�в��״̬Ԥ��в�����ǽ������[13]����������ӦЭ�������Ľ��ƹ��ơ����ֹ��Ʒ������ŵ��ǣ���Kalman�˲������У������ܹ���С��������Ϣ����ֶ����µ�ϵͳƫ���Ӱ�죬���ҿ��������Щϵͳƫ����Ӻ���ģ�ͺ����ģ��2����ͬʱ����˲�����Ŀɿ��ԡ�
1 ����ģ�������˲��㷨
�ڶ�̬�����У�����δ֪ģ�������˲�ģ��Ϊ��
![]()
![]() (1)
(1)
���У�XkΪtkʱ�̵�״̬��������k,k-1Ϊ״̬ת�ƾ���skΪδ֪��ģ����WkΪ����ģ������������LkΪ�۲�������HkΪ��ƾ���ekΪ�۲����������
sk=0ʱ���˲�ģ��Ϊ��
![]() (2)
(2)
����Ԥ������Ϊ��
![]()
![]() �IJв�����Ϊ��
�IJв�����Ϊ��
![]()
ʽ�У�![]() Ϊ
Ϊ![]() �IJв�������Lk�IJв�����Ϊ��
�IJв�������Lk�IJв�����Ϊ��![]() ������Wk��ek��Э�������ֱ�Ϊ
������Wk��ek��Э�������ֱ�Ϊ![]() ��
��![]() ����Wk��Wi��ek��ei������ء�����
����Wk��Wi��ek��ei������ء�����
![]()
![]() (3)
(3)
�����������£�![]() �����У�
������
![]() (4)
(4)
��Ȼ��![]() ����
����![]() ��ƫ���������ģ��ϵͳ����ֵ
��ƫ���������ģ��ϵͳ����ֵ![]() ����������Ķ���ģ��Ԥ��ֵ������Ϊ��
����������Ķ���ģ��Ԥ��ֵ������Ϊ��
![]() (5)
(5)
ʽ�У�![]() Ϊ
Ϊ![]() �ں���ϵͳ��������µIJв�������������۲�в��Ԥ��в״̬Ԥ��в����� ��ͬ��
�ں���ϵͳ��������µIJв�������������۲�в��Ԥ��в״̬Ԥ��в����� ��ͬ��
ʵ���У�������sk�Ĺ���ֵ�����һ���о����ڹ̶��Ĺ۲���Ԫ����ģ��ϵͳ���Ϊ��������Χ��ij��������仯������Բ��ù̶������ڵĹ۲�в��״̬Ԥ��в������ϣ���ķ�����ȡƽ��ֵ������ǰ��Ķ��壬skΪ����ģ�͵�ϵͳ��������ģ��ϵͳ���Ӧ��Ҫ��ӳ״̬Ԥ��ֵ��ƫ�����ʽ(5)����tk-i��Ӧ�У�
![]()
i=1������N (6)
�����趯��ѧģ��ϵͳƫ���ڶ�ʱ��![]() ��ά��С�仯��������
��ά��С�仯��������![]() ����Ԥ��״̬�����в������
����Ԥ��״̬�����в������![]() Ӧ��Ϊ0����
Ӧ��Ϊ0����![]() ����Ȼ����(6)ʽ����ȡ�ͣ��ٳ���N��������
����Ȼ����(6)ʽ����ȡ�ͣ��ٳ���N��������![]() ���У�
����
![]() (7)
(7)
����֤������ʽ(7)��õ�![]() Ϊsk����ƫ���ơ���Ϊ�Ѿ��ٶ���
Ϊsk����ƫ���ơ���Ϊ�Ѿ��ٶ���![]() ��ʾ��
��ʾ��![]() ����ϵͳ����������Ӧ��
����ϵͳ����������Ӧ��![]() ��ʽ(7)�ɸ�дΪ
��ʽ(7)�ɸ�дΪ
![]() (8)
(8)
ʽ�У�![]() ��
��![]() �ֱ�Ϊ
�ֱ�Ϊ![]() ��
��![]() ����������ѧ����Ϊ0����ʽ(8)ȡ����ֵ�ã�
����������ѧ����Ϊ0����ʽ(8)ȡ����ֵ�ã�
![]() (9)
(9)
ʽ(9)��������ʽ(7)��õĶ���ģ��ϵͳ���![]() ��sk����ƫ���ơ�
��sk����ƫ���ơ�
Ϊ��״̬����Ԥ��ֵ![]() ��Э�������
��Э�������![]() ��������Ԥ���в�
��������Ԥ���в�![]() �Ľ���Э���������
�Ľ���Э���������![]() ������Ϊ0���ʽ��Ƶ���
������Ϊ0���ʽ��Ƶ���
![]()
![]() (10)
(10)
����
![]() (11)
(11)
ȡ![]() ������ʽ(10)�У�
������ʽ(10)�У�
![]()
��һ������£�ϣ��ֱ�����![]() �����ȡ��
�����ȡ��
![]() ��i=1������N (12)
��i=1������N (12)
������![]() ������ʽ(11)���У�
������ʽ(11)���У�
![]() (13)
(13)
��ö���ģ��ϵͳ���![]() �Լ�Ԥ��״̬������Э�������
�Լ�Ԥ��״̬������Э�������![]() �ɽ�
�ɽ�![]() ����۲ⷽ�̺�״̬Ԥ�ⷽ�̣�����������õ�
����۲ⷽ�̺�״̬Ԥ�ⷽ�̣�����������õ�![]() ���ɽ��ж�̬Kalman �˲���
���ɽ��ж�̬Kalman �˲���
![]()
![]()
![]()
![]()
![]()
2 ���»��µ��˲�ģ��
���ݻ���������ͣ����»��¿ɷ�Ϊƽ���͡����͡������ͺ��㵹�͵ȶ�����ʽ[14]�����ѱ��»�����Ϊƽ�����⣬�����Ƕ�����һ������ϵͳ������(��ͼ1), �����������Ϊ������С�Ŀ�����ɡ�������ֻ����ͼ1��ʾ�Ŀ���ϵͳ��Ϊ��ʹ�����������嶼�Ǹ��塣������ļ�����״����ѧ���ʶ�����֪�ģ�����Ե�������ϵͳ���˶����̡���ţ�ٵڶ����ɿ�֪������ϵͳ�е��κ�һ����������״̬��ͼ2�����˶��ɱ�ʾΪ��
![]() (14a)
(14a)
![]()
![]() (14b)
(14b)
���У�aix��aiz�ֱ�Ϊ��i�������x�����z����ļ��ٶȣ�NΪ��ѹ����RΪĦ��������Nx��Nz�ֱ�ΪN��x��z����ķ�����Rx��Rz�ֱ�ΪR��x��z����ķ�����mΪ�����������gΪ�������ٶȣ�xi��ziΪ������x��z�����λ�ƣ�P��TΪ���ڿ��������������tΪʱ�䡣
���� (14) Ҳ�ɱ�ʾΪ��
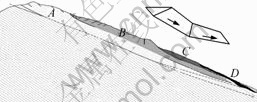
ͼ1 ����ϵͳ
Fig.1 Block system
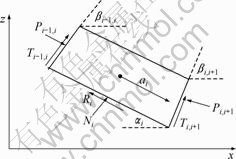
ͼ2 ijһ���������״̬
Fig.2 Geometry and forces associated with a rigid block
![]() (15)
(15)
����
![]()
![]()
![]()
![]()
![]()
![]()
������������ϵͳ����ʽ(15)�ɹ������·����飺
![]() (16)
(16)
M ��A1 ��Mi��A1i ��ɡ�
![]()
![]()
![]()
![]()
����(16)��ʾ����1������ϵͳ���˶����̣���ϵͳ��ֻ��1�����壬����У�
![]() (17)
(17)
Ϊ������㾫�ȣ��Բ���Y�������±任��Y=Y0+DY(���У�Y0��Y�ڱ��»��崦�ڼ���ƽ��״̬�µ�ȡֵ)�������ڼ���ƽ��״̬�£��������ļ��ٶȶ�Ϊ0����axi=azi=0������ʽ(16)�ɵã�
![]() (18)
(18)
G0��C0��G�ڼ���ƽ��״̬�µ�ȡֵ����ʽ(16)��(18)�ɵã�
![]() (19)
(19)
����![]()
![]() ��Ϊλ��������
��Ϊλ��������![]() 0,
0, ![]() ��
��![]() ��Ϊ�ٶ�������a=
��Ϊ�ٶ�������a= ![]() ����Ȼ��DY ��ʾ���»���ĵ�ǰ״̬���ȶ�״̬֮��IJ�𡣱��»����״̬��������״̬������������
����Ȼ��DY ��ʾ���»���ĵ�ǰ״̬���ȶ�״̬֮��IJ�𡣱��»����״̬��������״̬������������
![]()
���ո�����˶����̣���������˶���״̬k ת�Ƶ�k+1ʱ����λ�ƺ��ٶȰ���ʽ�仯��
![]() (20)
(20)
�����������ĵ���ˮλ�仯�͵�����������⣬��ʵ�ʹ����У������ڱ��»����ϵ�����һ���DZ��ֲ���ģ���ˣ����Լٶ�DG=0��DYk+1=DYk�������������仯����ֻҪ���ֱ仯��С��������Ϊ״̬ת�����(ϵͳ����)��������һ����ͷ���(19)�ɵã�
![]()
![]() (21)
(21)
��ʽ(20)��(21)�ɵ�״̬ת�Ʒ��̣�
 (22)
(22)
ģ��(12)�����˱����˶��ļ��ٶȣ�����һ������£������ڷ�������ͻ��֮ǰ�Ļ��ƹ����У��ƶ��ļ��ٶȷdz�С���ھ����������£����ٶ�����ܴ�1 cm/d2��Ԥʾ���½������������ٶ�1 cm/d2���˶�ѧ����dz�С����ˣ�����ģ��(22)��ɾ�����ٶ���õ�����ģ�ͣ�
![]() ��
��
![]() (23)
(23)
����![]() ��
��![]()
![]() ��
��![]() ��LkΪ�۲�������ekΪ�۲���
��LkΪ�۲�������ekΪ�۲���
���ڱ߿��������Ϣ������֣����ܵõ�sk�ľ���ֵ����ˣ����˲������У���������δ֪������Ϣ����Xk��ʾ״̬��������ʽ(23)�е�Xk�䣬��ʽ(23)���Եõ�����δ֪����ı��μ���˲�ģ��(��ʽ(1))��
3 ʵ�����������
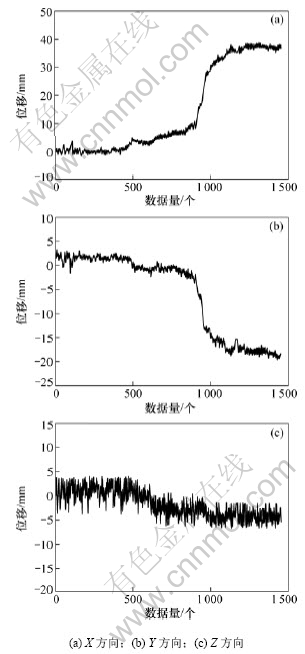
�Ժ���ij���ٹ�·���¼��Ϊ�����ñ����Ѳ��ÿ������д��Σ���������δ֪���ڿ����ϲ���۲�㣬�۲�����άλ�ơ�����GPS������̬ģʽ�۲⣬����ʱ��Ϊ15 s������ÿ3 h����1�ν�������۲�6�£�Լ1 500�������![]() ��
��![]()
![]() (���У�X��Y�ֱ�Ϊx��yˮƽ����λ�ƣ�ZΪ����)�����ڼ��㲼���ڿ����ϣ�������Ҫ��·��б(��ˮƽλ��)��������С��Ϊ��˵��������ĸ÷�������Խ�ԣ����İ��ո�����˶����̣���������˶���״̬k ת�Ƶ�k+1ʱ����λ�ƺ��ٶȰ�ʽ(20)�仯�����������2�ּ��㷽����
(���У�X��Y�ֱ�Ϊx��yˮƽ����λ�ƣ�ZΪ����)�����ڼ��㲼���ڿ����ϣ�������Ҫ��·��б(��ˮƽλ��)��������С��Ϊ��˵��������ĸ÷�������Խ�ԣ����İ��ո�����˶����̣���������˶���״̬k ת�Ƶ�k+1ʱ����λ�ƺ��ٶȰ�ʽ(20)�仯�����������2�ּ��㷽����
����1 ���ó����Ŀ������˲�������Ķ�̬���̣��������̬������ֻ�����˸�����˶��������DZ��µ�������Ϣ��
����2 �����������ĵ���ˮλ�仯�͵�����������⣬��ʵ�ʹ����У���Ϊ�����ڱ��»����ϵ�����һ���DZ��ֲ���ġ���ˣ����Լٶ���G=0����Yk+1=��Yk�������������仯����ֻҪ���ֱ仯��С��������Ϊ״̬ת�����(ϵͳ����)��
![]()
���ڱ߿��������Ϣ������֣����ܵõ�sk�ľ���ֵ����ˣ����˲������У���������δ֪������Ϣ�����ñ��ĸ������㷨�����˲����㡣
ͼ3��ͼ4�ֱ�����˷���1�ͷ���2�ļ��������Ա�ͼ3��ͼ4���Կ�����
(1) �ܹ۲����ͻ���ϵͳ����˫��Ӱ�죬���÷���1��õĵ�λ�α䲻�����⻬, ����Ҳ�ϵ�(��ͼ3)����������ģ�͵�������ϵͳ����, �ɴ���õ��α�λ����Ȼ���ڽ����Ե�ϵͳ��
(2) �ڷ���2�У���Ϊ�����˵�λ��������Ϣ������δ֪��������Ϣ������ϣ����ֵ�ƽ���˵�������ģ����Ϣ�۲���Ϣ�Ի���Ԥ��Ĺ��ף������������(��ͼ4)��
(3) �ڱ��¼��ʵ���У�������������Ԥ֪�۲ⷽ�̺Ͷ���ѧ�����Ƿ���ϵͳ�����ǣ��ɲ����ƶ����ڵ�ϵͳ��������ϡ�
(4) �ƶ����ڵ�ϵͳ��������ʵ����Ҳ����һ�����ѣ���ΪԤ�Ⱥ���ȷ�����ڵĿ��ȡ��ڱ��������У����ô��ڿ���N=10����ϵͳ���仯�����нϴ�仯����NҲ��Ӧ�仯�����ѡȡ���ڵĿ�����ʵ���е��ѵ㣬һ����ͨ��������龭����ȷ����
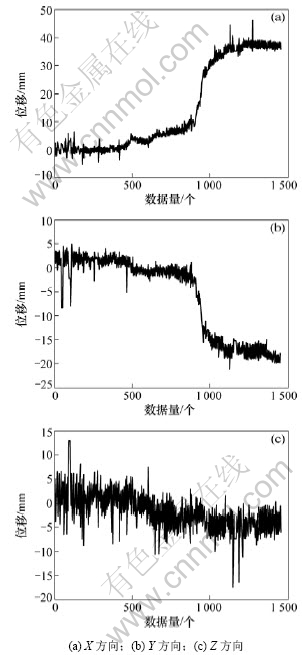
ͼ3 ����1��X��Y��Z����λ������
Fig.3 Displacement curve of Scheme 1 in X,Y and Z direction
ͼ4 ����2��X��Y��Z����λ������
Fig.4 Displacement curve of Scheme 2 in X,Y and Z direction
4 ����
(1) �ڱ��μ���У������µ�������Ϣ�����ʱ���������ǿ���һ��δ֪��ϵͳ�������˲�����Ĺ۲�в��״̬Ԥ��ֵ�в�����ǽ��п�����ϣ������Ϳ��Խ���δ֪��ϵͳƫ��Ӱ�죬�Ӻ���ģ�ͺ����ģ��2������ͬʱ�Ľ��˲�����Ŀɿ��ԡ�
(2) ����������㷨��Ӧ��ǰ���ǣ���һ���̶���ʱ�䴰���ڣ�δ֪��Ϣ��1��������Ȼ������ʵ�ʱ��ι۲��У�δ֪����Ϣ��ϱ仯����ˣ��ý��㷽�����д��ڽ�һ���о���
�ο����ף�
[1] Zangerl C, Eberhardt E, Perzlmaier S. Kinematic behaviour and velocity characteristics of a complex deep-seated crystalline rockslide system in relation to its interaction with a dam reservoir[J]. Engineering Geology, 2010, 112: 53-67.
[2] Bonzanigo L, Eberhardt E, Loew S. Long-term investigation of a deep-seated creeping landslide in crystalline rock-geological and hydromechanical factors controlling the campo vallemaggia landslide[J]. Canadian Geotechnical Journal, 2007, 44(10): 1157-1180.
[3] �콨��, ������, ������. ���ɵ��ʡ���ѧ��Ϣ�ͼ�����ݵĻ��¶�̬ģ��[J]. ���ѧ��, 2003, 32(3): 261-266.
ZHU Jian-jun, DING Xiao-li, CHEN Yong-qi. Dynamic landsliding model with integration of monitoring information and mechanic information[J]. Acta Geodaetica et Cartographica Sinca, 2003, 32(3): 261-266.
[4] YANG Yuan-xi, ZENG An-min. Adaptive filtering for deformation parameter estimation in consideration of geometrical models[J]. Science in China Series D: Earth Science, 2009, 52(8): 1216-1222.
[5] Shi G H. Applications of discontinuous deformation analysis (DDA) to rock engineering[J]. Computtional Mechanics, 2009(2): 136-147.
[6] Bonaldi P. Displacement forecasting for concrete dams via deterministic mathematical models[J]. Water Power & Dam Construction, 1977, 29(9): 74-78.
[7] Purer E. Application of statistical methods in monitoring dam behavior[J]. Water Power & Dam Construction, 1986, 38(12): 16-19.
[8] DeSortis A, Paoliani P. Statistical analysis and structural identification in concrete dam monitoring[J]. Engineering Structures, 2007, 29: 110-120.
[9] Schwintzer P. Generalization for deformation vector with hybrid model[C]//Jo? I, Detrek?i A, eds. Deformation Measurements. Budapest: Akademiai kiad��, 1982: 453-463.
[10] Bock Y. Estimating crustal deformations from a combination of baseline measurements and geophysical models[J]. Bull Geod, 1983, 57: 294-311.
[11] Bock Y, Schaffrin B. Robust predication of the Earth��s crustal movements from precise geodetic data and a vague geophysical mode[C]//The First World Congress of Bernoulli Society on Mathematical Statistics. Taschkent (USSR), 1986 361-367.
[12] Segall P, Matthews M V. Displacement calculations from geodetic data and the testing of geophysical deformation model[J]. J Geophys Res, 1988, 93(B12): 14954-14966.
[13] ��Ԫϲ, ��˫��. ���������е�ϵͳ����Э����������[J]. ���ѧ��, 2004, 33(3): 189-194.
YANG Yuan-xi, ZHANG Shuang-cheng. Fittings of systematic errors and covariance matrices in navigation[J]. Acta Geodaetica et Cartographica Sinca, 2004, 33(3): 189-194.
[14] L�� W C, Xu S Q. Kalman filtering algorithm research for the deformation information series of the similar single difference model[J]. Journal of China University of Mining and Technology, 2004, 14(2): 189-194.
�ո����ڣ�2010-05-10�������ڣ�2010-07-25
������Ŀ��������Ȼ��ѧ����������Ŀ(40874005)
ͨ�����ߣ���͢Ӣ(1964-)��Ů��ɽ����ͬ�ˣ���ʿ�о����������ڣ����²������ݴ������о����绰��0731-88837860��E-mail��ZTY2003@163.com
