
DOI: 10.11817/j.issn.1672-7207.2016.09.019
�����ռ��л����˵���������ģ��
���أ����������磬��־��
(�����Ƽ���ѧ �������ͨ�Ź���ѧԺ��������100083)
ժ Ҫ��
�ij������ۣ�����Դ������״̬�ռ��н������������˵������ɿص���е��ڹ��̡����ȣ��ڷ�ϣ��-Τ�����ɵĻ����ϣ���������Gross�������������Է�����֪������ָ������֪�������̣���Σ��������ǿ�ȵ����������һ��������Ч�������������ǿ��˥��ģ�ͣ��ٴΣ����ݶ�������ѧ���ۣ������������Դ�������������ռ䣬����ģ�����̼��������������������������ù��̣�������������������ѶȵĻ�������Ϊ��������ģ�͡��ڴ��о������ϣ��������HMM������״̬�̼�ת���㷨����������ģ���㷨����13���ɶȵķ��������ƽ̨�У�ʵ�ַǵ��ͱ��齻�������л����˲�ȷ�����������̵Ķ�̬���ɿص��ڡ�ͨ������������״̬�ռ��еIJ�ȷ���Լ��㽫��ɢ������״̬��չ�������ռ��У������������м�״̬�Լ����ӻ������������ڵ������������о����������������֪�����������������Ļ����˿����ڽ���������ʹ�����ߵ�����̶ȵõ�һ��������
�ؼ��ʣ�
���������˻���������֪������������������Դ�������ռ���
��ͼ����ţ�TP242.6 ���ױ�־�룺A ���±�ţ�1672-7207(2016)09-3050-08
Robot emotional interaction model in continuous space
XIE Lun, LIU Xin, HE Miao, WANG Zhiliang
(School of Computer and Communication Engineering, University of Science and Technology Beijing,
Beijing 100083, China)
Abstract: A service robot��s continuous and controlled emotional regulation in active field state space was proposed based on field force theory in human-robot interaction. First, on the basis of Fechner-Weber law, emotional spontaneous and guidable cognitive reappraisal in Gross strategies were analyzed quantitatively. Second, emotional attenuation model associated with valence was set up by the emotion intensity third law, and energy space in active field was proposed for simulating the interaction between external stimulus and robot��s emotion. Finally, the stimulating emotional transfer algorithm based on Hidden Markov Model (HMM) was come up with to realize real-time dynamic control on 13 DOF service robot for uncertainty emotional regulation in interaction with atypical facial expressions. The anthropomorphic emotional regulation which operates in a continuous 3D emotional space enables a wide range of intermediary emotional states to be obtained. The results show that the robot with cognition and emotional control ability could serve more participants�� emotional needs in the human-robot interaction (HRI).
Key words: robot; human-robot interaction; cognitive reappraisal; emotional regulation; active field emotional space
��������֮��Ĺ�ͨ�뽻������Ȼ��������еģ���ˣ����˻������Ĺ����У�����Ҳ����Ȼ�����������������֪������������ʹ������ܹ�ʶ��Ͳ���������������Ѿ�Խ��Խ����ܵ��������ѧ������ѧ��ѧ�ƵĹ�ע����������֪��м�����һ��������[1-2]����֪��м���(cognitive affective computing)����Ҫ����������������һ���Ĺ۲졢��������ɸ�������״̬������������ʹ���������һ���ܽ�����Ȼ�����к������ؽ���[3-5]�����������������о�����ӿ�ֳ��ڶ��м�ֵ������ģ�͡�LAZARUS[6]ָ����֪������������ֵ����(��������ѧ������Ӱ���ֵ������֮һ)����������Ϊ����������ķ�չ����һ���ٽ���������״̬��������о��������沿�����о���EKMAN[7]�����6�ֻ���������״̬�����������֡��־塢���ˡ���ŭ�����Ⱥ���÷�����õ��������������о�����ѧ�ߵ��Ͽɡ�AMERO[8]����������Ϊ��ŭ����롢�־塢���֡���Ȥ�ͱ��ˣ�������Ӧ�õ��罻�����˵�������ģ�о��С�GADANHO[9]��4�ֻ�������״̬(���֡��־塢���˺ͷ�ŭ)���ض��¼�����ϵ����չ������ģ�о���VEL SQUEZ[10]�����һ�ֻ�����������״�����������˿��Ʒ������˷�����6�ֻ�������״̬(��ŭ���־塢�ûڡ����֡����;���)Ӧ���ڻ����˵���������γ������ѧϰ�����������о��С�MURPHY��[11]���������л�ȡ��4�ֻ�������״̬(���֡����š����ĺʹ��)Ӧ�õ���Agentϵͳ��ģ�С�������֪����о��IJ������룬Խ��Խ���ѧ�߽���ɢ����������չ������������״̬�ռ��С�MEHRABIAN��[12]�����PAD(pleasure-arousal-dominance)��ά���ģ�ͣ�PAD ����ģ�������öȡ�����Ⱥ����ƶ��� 3���������ά���������Ͳ�������״̬�����У����öȱ�ʾ��������״̬������������ԣ�Ҳ����������Ч�ۣ�����ȱ�ʾ���������������ˮƽ����������״̬�����ƶȱ�ʾ����Ի��������˵Ŀ���״̬������������״̬���Ǵ���˳��״̬[13-14]���ڴ˻����ϣ�SCHERER��[15-16]�Ľ���PAD��ά�����ռ䲢����Ӧ�����罻�����˵���������ϵͳ�С�ZECCA��[17]��������APC (arousal-pleasant-certain)��ά���������ռ�Ӧ���ڻ���ѧϰ����̬�������ڼ������ĸ��Ի��о������⣬BREAZEAL[18]�ڶԱ��������Kismet���о������������AVS(arousal-valence-stance)�����ռ�ģ�͡����Ŀǰ�˻����������е���֪ȱʧ���⣬�������������һ�ֻ���Gross��֪����������״̬�������ڷ��������ȣ��������Ķ�̬���ڹ����У���������Gross��֪���Ե�ָ���Լ��Է�����֪����ģ�ͣ�����ɸ��Ի�����֪���̣���ǿ�����˵Ķ�̬��֪���ܡ���Σ�����Դ�������ռ��У���������˥�����ӣ��Դ�����������ʱ��Ǩ�Ƶı仯���̣����ռ��е������ֲ��õ������˵�����״̬ת�Ƹ��ʡ����գ�����������Ʒ�˫��������������������˵�����������������13���ɶȵĻ�����ʵ��ƽ̨Ϊ��������Ļ�������ʵ����������˵Ķ�̬��֪����������
SQUEZ[10]�����һ�ֻ�����������״�����������˿��Ʒ������˷�����6�ֻ�������״̬(��ŭ���־塢�ûڡ����֡����;���)Ӧ���ڻ����˵���������γ������ѧϰ�����������о��С�MURPHY��[11]���������л�ȡ��4�ֻ�������״̬(���֡����š����ĺʹ��)Ӧ�õ���Agentϵͳ��ģ�С�������֪����о��IJ������룬Խ��Խ���ѧ�߽���ɢ����������չ������������״̬�ռ��С�MEHRABIAN��[12]�����PAD(pleasure-arousal-dominance)��ά���ģ�ͣ�PAD ����ģ�������öȡ�����Ⱥ����ƶ��� 3���������ά���������Ͳ�������״̬�����У����öȱ�ʾ��������״̬������������ԣ�Ҳ����������Ч�ۣ�����ȱ�ʾ���������������ˮƽ����������״̬�����ƶȱ�ʾ����Ի��������˵Ŀ���״̬������������״̬���Ǵ���˳��״̬[13-14]���ڴ˻����ϣ�SCHERER��[15-16]�Ľ���PAD��ά�����ռ䲢����Ӧ�����罻�����˵���������ϵͳ�С�ZECCA��[17]��������APC (arousal-pleasant-certain)��ά���������ռ�Ӧ���ڻ���ѧϰ����̬�������ڼ������ĸ��Ի��о������⣬BREAZEAL[18]�ڶԱ��������Kismet���о������������AVS(arousal-valence-stance)�����ռ�ģ�͡����Ŀǰ�˻����������е���֪ȱʧ���⣬�������������һ�ֻ���Gross��֪����������״̬�������ڷ��������ȣ��������Ķ�̬���ڹ����У���������Gross��֪���Ե�ָ���Լ��Է�����֪����ģ�ͣ�����ɸ��Ի�����֪���̣���ǿ�����˵Ķ�̬��֪���ܡ���Σ�����Դ�������ռ��У���������˥�����ӣ��Դ�����������ʱ��Ǩ�Ƶı仯���̣����ռ��е������ֲ��õ������˵�����״̬ת�Ƹ��ʡ����գ�����������Ʒ�˫��������������������˵�����������������13���ɶȵĻ�����ʵ��ƽ̨Ϊ��������Ļ�������ʵ����������˵Ķ�̬��֪����������
1 �����˵���֪��������
1.1 ��֪��������
GROSS[19-20]��Ϊ��������(emotion regulation)�Ǹ���Բ�������������������ʱ��������ν��������������������Ӱ��Ĺ��̡���˵������������ָ������������������������ʩ��Ӱ��Ĺ���[16]�����������漰��������DZ���ڡ�����ʱ�䡢����ʱ�䡢��Ϊ����������顢������Ӧ�ȵĸı䣬��һ����̬���̡�Gross�����5���������ڲ���[21]���龳ѡ���龳������ע����䡢��֪������������ơ���֪�����Ƿ������������ڹ������ڵ����о۽����ԣ���֪�����������Է�����֪������ָ������֪����2���֡��Է�����֪������Ҫ�����������������ڲ���־�������ص�Ӱ�죬�Ե�����֪��������ָ��������ǿ�Ⱥ͵�ǰ����״̬�Ŀ��ų̶ȡ������崦�������������ڴ�����ʵ���ڲ��ʱ������������籯�ˡ����ǡ���ŭ��ʹ��ȸ���������һ����ԣ���֪�������̿�����Ч����������ǿ�ȣ����Ƹ�����������顣���⣬���������ڵĹ����У��������Ʋ���Ҳ���Դٽ�������������̶ȵĽ��͡�Ȼ��������ѧ���о�֤�������������4���������ڲ��ԣ���֪�������Զ������Ƹ���������������Ϊ��Ч��
�˵��������������������ڻ���������þ��������˵�����δ�õ�����ʱ��������ڲ�������������(�ɾ��嵽Ŀ������)�����յ����á���ˣ��˵���ΪB�Ǹ���P�뻷��E�ĺ�����
 (1)
(1)
���Խ������ռ�����Ϊһ�����壬�����屻����Ϊ�����ͬ���������У�ÿһ���������һ������״̬��������һ����Ϊ�Ŀ��ܡ�ͨ����Ϊ�Ľ�����Ŀ��������������������������������ų�������������������ۡ�
�ɴ˿ɼ����˵�������Ϊ��������Ϊ�����ڻ�����ͬ�������ڱ����漰����������˵Ľ��������У����������ص㿼�ǵ������ߵ�����״̬�������Լ�����ָ����������ǿ�ȣ�����������Ҫͨ��������ģ��������Է�����֪������ʵ�֡�
1.2 ָ������֪������ģ
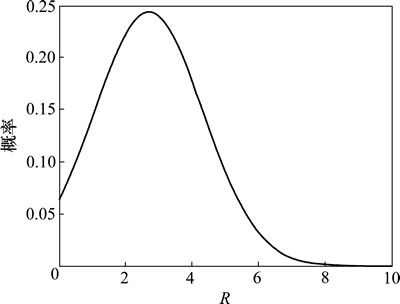
���˻������Ĺ����У������߿���ͨ�����ԡ���Ϊ���沿����ı��﷽ʽ��������˹����Ͱ�ο���Դ˴ﵽָ������֪������Ŀ�ģ����Ľ��Բ����ߵı�����Ϊָ������֪���������ݡ�����Դ��״̬�ռ��У�ָ������֪�����ķ�������ı����̼�������λ�ã��������ʾ���ͳ�Ʒ�����֪�����������֪����״̬���������̼�����״̬��ָ������״̬��ĸ��ʷֲ����Ӹ�˹�ֲ�����ͼ1��ʾ��
����֪�Ĺ����У�ָ��������ǿ�� ��״̬�ֲ��ķ�ɢ�Բ���Ӱ�죬�����˵�ǰ����״̬�Ŀ��Ŷ�s�Էֲ�������λ�����������ã���ˣ��õ��˸�˹�ֲ�����ѧ����
��״̬�ֲ��ķ�ɢ�Բ���Ӱ�죬�����˵�ǰ����״̬�Ŀ��Ŷ�s�Էֲ�������λ�����������ã���ˣ��õ��˸�˹�ֲ�����ѧ���� �ͷ���
�ͷ��� �ֱ�Ϊ��
�ֱ�Ϊ��
 (2)
(2)
 (3)
(3)
���У�RΪ���̼�����״̬��ָ�������ľ��룻eΪŷ������
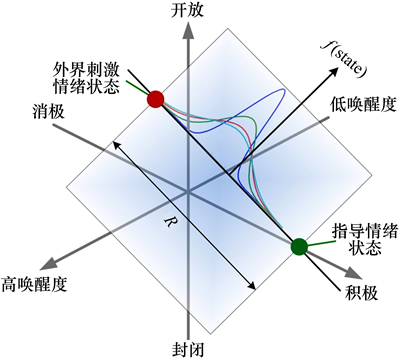
ͼ1 ָ������֪��������
Fig. 1 Instructive cognition and reappraisal
1.3 �Է�����֪������ģ
��ϣ��-Τ������ָ�����ڸ���ǿ�������̼�ǿ�ȵĶ��������ȣ���
 (4)
(4)
���У�FΪ����ǿ�ȣ�IΪ�̼�ǿ�ȣ�Km��CΪ��������Ȼ������һ�����ʵĹ��ɣ������������������ȸ������ص�Ӱ�죬���Է�����֪������ĸ���ǿ�ȹ��ɲ������ͳһ����ˣ�������������������� ���Ӷ�ʽ(4)�ɱ�ʾΪ
���Ӷ�ʽ(4)�ɱ�ʾΪ
 (5)
(5)
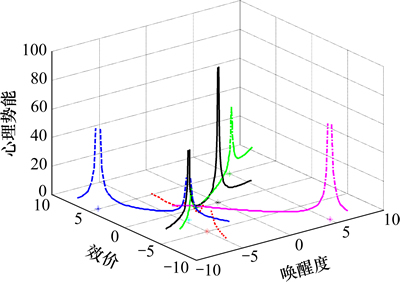
����AVS��ά���ģ�ͣ�������Ƴ�������������ÿ��ά��(A��V��S)�ֱ���4����Ŀ���в��������Ѷ�ͨ��ƽ��-�˷ܡ�֧��-˳�ӡ�ʹ��-���ˡ�����Ȥ-����4����в�����Ч��ͨ����ŭ-���롢�ܿ�-���ء��Ѻ�-���ƽ��-�˷�4����в��������Ŷ�ͨ��ǫ��-�߰����˷�-��ŭ���н�-���ȡ���Ӱ����-��Ӱ��4����в��������ݾŵ����������������Ʒ�����ÿ����Ŀ����1��������2��ά���ϻ������죬��������ά���϶���������״̬���ݴ���ɣ������ʼ�ļ����Ϊ9�Ρ���Լ���������������˶�Ӧ7�ֵ������̼�����״̬��7��ʵ�鳡���������ѡ��500����ͬ����ε�־Ը��(11~20�꣬21~30�꣬31~40�꣬41~50�꣬51~60���100��)��ͨ��ʵ���ø������̼�״̬�µ�AVS���ݡ����Է�����֪�������״̬�ֲ���ͼ2��ʾ����ͳ�Ʒ��֣���֪�������龰��Ӧ��500��AVS���������Եı仯�������龰��Ӧ��500��AVS���ݽ��Ʒ��Ӹ�˹�ֲ����Ӷ���������һ�������˹�ֲ����������ģ���Է�����֪�IJ��� ��ʹ�����˾��в�ȷ���Եġ���Ԫ�����Է���֪��ʽ��
��ʹ�����˾��в�ȷ���Եġ���Ԫ�����Է���֪��ʽ��
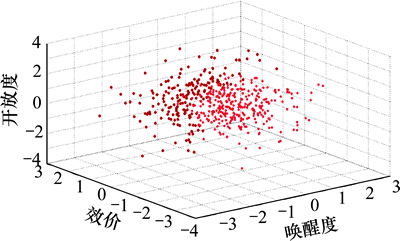
ͼ2 ���Է�����֪�������״̬�ֲ�
Fig. 2 Emotional state distribution after spontaneous cognition
2 �����˵Ķ�̬�������ڹ���
2.1 ����״̬�Ŀռ�����
�봫ͳ��������״̬��ͬ���ǣ����Ľ��������ڹ��̶���������ʱ������״̬�ռ��У���ʹ�����˵��������̸���ϸ�塢���ˡ������˵���������״̬�ռ�S�����������������������飬�����̼������£������˵�����״̬�����ڸÿռ������ɵ�ת��������״̬St���Կ���tʱ������Դ��״̬�ռ��е�λ�á�����Դ��״̬�ռ��У�ÿ������״̬��ǿ�ȶ�����ͨ�����������������ȡ���Ekman 6�ֻ����������۵Ļ����ϣ���ƽ�����뵽���̼��������У��Դ˹��ɾ���7�ֻ�������״̬�����̼������ռ䣺
W={��ŭ����־壬���ˣ����ˣ����ȣ�ƽ��}
2.2 �����ռ��е�������ģ
��������ѧ������������������ڹ�������������ϵͳһ������Ҫ������������������ѧ�г�֮Ϊ������������ˣ����Ľ����ĸ������뵽Kismet�����˵Ļ��Ѷ�-Ч��-���Ŷ�(AVS)��ά����״̬���У���������������ʱ�����ԣ������Զ����غ����������ڹ����������Ķ�̬ת�ƹ��̡��ڴ���Դ��״̬�ռ��У������˸��ܵ������̼��������䵱ǰ��������״̬���������ͼ3��ʾ�����У�����ǿ����ֲ�������״̬�ļ���������ǿ�Ⱦ�����
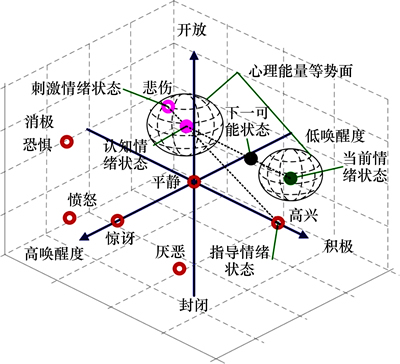
ͼ3 ��Դ�������ռ�ģ��
Fig. 3 Emotion space model in active field
�ڴ�����״̬�ռ��У��������� ������ѧ����ѧ���������������ռ��ڵĸ�����״̬�ļ���������ڻ����˵�ǰ����״̬
������ѧ����ѧ���������������ռ��ڵĸ�����״̬�ļ���������ڻ����˵�ǰ����״̬ �뾭��֪����������̼�״̬
�뾭��֪����������̼�״̬ �Ĺ�ͬ�����£������˲�����һ������״̬
�Ĺ�ͬ�����£������˲�����һ������״̬ ����λ�ý��ڵ�ǰ״̬��̼�״̬֮�䣬��������Ϊ
����λ�ý��ڵ�ǰ״̬��̼�״̬֮�䣬��������Ϊ
 (6)
(6)
���У�QWΪ����֪���������̼�����״̬��ǿ�ȣ�QSΪ��ǰ����״̬��ǿ�ȣ� Ϊ������
������
2.3 ����ǿ�ȵ�˥��
��AVS��ά����״̬�ռ��У�������Ч��(valence)���ڱ������������ԣ�������ǿ�ȵ�˥���߶Ƚ�����ء�������֮������ǿ�ȵ�˥���ܵ�Ч��������v��Ӱ�졣�Ӷ��õ�������˥��ϵ�� Ϊ
Ϊ
 (7)
(7)
����ǿ�ȳ����ܵ������������Ե�Ӱ���⣬��������ʱ���Ǩ����˥�����������ǿ�ȵ�������(���ǿ��ʱ��˥������)��֪������ǿ�������ʱ��T�ɸ�ָ����ϵ���Ӷ����Եõ�����ǿ�ȵ�˥������(��ͼ4��ʾ)��
 (8)
(8)
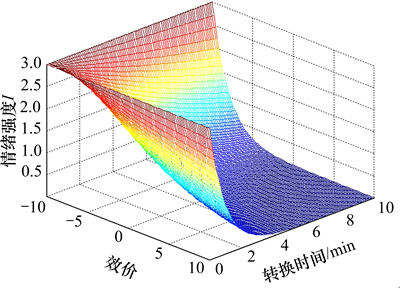
ͼ4 ����ǿ�ȵ�˥��
Fig. 4 Attenuation of emotional intensity
��Ȼ���Ӿ�����������˵���κ���е�ǿ�ȶ��������ӽ���0����Ϊ���κ���е�ǿ��һ�����ڡ����ǿ�ȵ������ɡ��������²�������0����һ���������ڶ�����������Ŷ��²���ƫ��0���Ӷ��γ��������ϵ��ڵIJ������̡�
2.4 ����HMM�Ķ�̬��������
��������˵������������Ի���Ϊ2���֣�������֪�ĸ��Ի��������ںͻ����˵�������Ϊ����˽������̿��Կ���һ��˫��������̣���ˣ����IJ����������ɷ�ģ�Ͷ������ģ����ͼ5��ʾ�������ϣ������˵�����״̬��������������ʹ��������������״̬������Խ���䱻����Ŀ�����Ҳ��֮����������ʵ�����������У�����״̬�����������������������(����)������С(����)��������һ����ֵ�ڱ��������֪����ˣ���Ҫ���������Ŀɸ�֪��ֵ[L, H]��������״̬��������L��H֮��ʱ��������״̬���ڱ�����Ŀ����ԡ��Ӷ��õ�����Դ��״̬�ռ��У������˵���һ����״̬����Ϊ
 (9)
(9)
ʽ�У� Ϊ����״̬j���������ܡ�
Ϊ����״̬j���������ܡ�
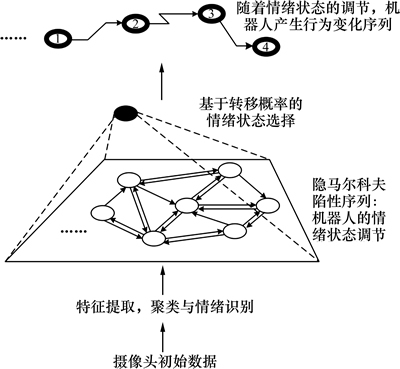
ͼ5 ����HMM�Ķ�̬�������ڹ���
Fig. 5 Regulation process of dynamic emotion based on HMM
3 �����˵���Ϊ������ʵ��
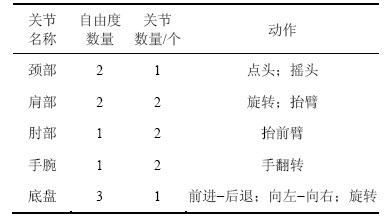
3.1 �����˵Ļ�е�ṹ
�����˵Ļ�е�ṹ���ݳ������弰��֫������ƣ���ͼ6��ʾ�������˹���13�����ɶ�(���1��ʾ)������ʵ�ְ����ֱ��齻�����ֱۼ��������ö�ؽ�����������ʽ������˻����˶Ը��˶��ؽڵ�Эͬ�����������������ʱӰ�콻��Ч�������⣬ͨ��PWM˫����Ƽ�����ʵ�ֻ��������ⷽ�ȵ���̬���ơ����⣬�����˲�������ʽȫ���ƶ�������ƣ���ͼ7��ʾ��˫ǰ��������ʽ��Ч����˻����˵�������������������ͨ������ʽPID�����������ڵĹ��̣�ʵ�ֻ��������ⷽ��ȷ��ֱ�������˶�ʵ���Զ������ϰ���·���滮��
3.2 �����˵���������ģ��
���˻����������У������˲��ϻ���������������������ͨ���沿������һ������Ӧ���IJ��ֱ��ֳ��䵱ǰ����״̬����Gross��֪���������У�����������Ϊ��Ӧ��ע����������������Ӧ����֮����У�����ͨ�����ҿ��Ƶķ�ʽ�������۵Ĺ���������Ϊ��Ҳ����˵�����������������Ŀɿ���������ء�������ѧ�о��У������ļ���̶���ɿ�������������߱��ϸ���̶ȵ�����ʱ����������Ƶ�Ӱ�����Լ�������AVS����״̬�ռ��У�����״̬�ڻ��Ѷ������λ�ÿ��Ա��ֳ����������߱��ļ���̶ȣ���ˣ����Ѷȵ�����aӰ���Ż����˵ı�������������ͨ��Ԥ�������ɵõ���������˵������������ӣ�
 (10)
(10)

ͼ6 �����˵Ļ�е�ṹ���
Fig. 6 Mechanical structure design of robot
��1 �����˵����ɶȷ���
Table 1 Freedom degree distribution of robot
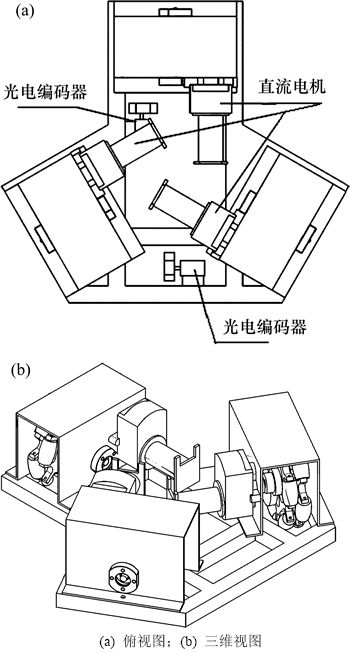
ͼ7 ����ʽȫ���ƶ��������
Fig. 7 Three-wheeled omnidirectional mobile chassis design
��������˵ı���������Ϊ �����ڱ����������ú�ʵ�ʶ�������(��ͼ8��ʾ)Ϊ
�����ڱ����������ú�ʵ�ʶ�������(��ͼ8��ʾ)Ϊ
 (11)
(11)
3.3 ��Ϊ������ʵ��
�������������������ģ�ͱ�Ӧ����ʵʱ�������龰�н�����Ч����֤�������˲��û���GaborС���ı���ʶ���������ߵ�����״̬���������ͼ9��ʾ��
����Դ�������ռ��У�����ͨ�������˵���֪����״̬�뵱ǰ����״̬�õ����ڿռ��е�����״̬ת�Ƹ��ʷֲ�����ijʱ�̣�ָ������״̬����Ϊ(0, 5, 0)���ɱ�������õ������̼�״̬Ϊ���ˣ�������λ��(-6, -4, 0)���Ӷ��õ�����֪����״̬��ѭ��ѧ����Ϊ ������Ϊ
������Ϊ �ĸ�˹�ֲ�����ͼ10��ʾ����ͼ10���Եõ���(-4.5, -1.75, 0)���ĸ���Ϊ���������ֵ���ڴ�����ͬ��֪����״̬���������˵ĵ�ǰ����״̬��ͬʱ������һ����״̬��ת�Ƹ��ʲ�ͬ��ͼ11��ʾΪ��֪����״̬λ��(-4.5, -1.75, 0)ʱ����ͬ����״̬��Χ���������ֲܷ���
�ĸ�˹�ֲ�����ͼ10��ʾ����ͼ10���Եõ���(-4.5, -1.75, 0)���ĸ���Ϊ���������ֵ���ڴ�����ͬ��֪����״̬���������˵ĵ�ǰ����״̬��ͬʱ������һ����״̬��ת�Ƹ��ʲ�ͬ��ͼ11��ʾΪ��֪����״̬λ��(-4.5, -1.75, 0)ʱ����ͬ����״̬��Χ���������ֲܷ���
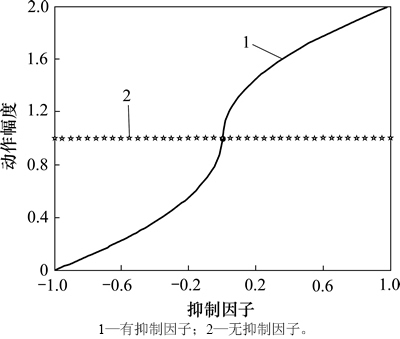
ͼ8 �����������Ӷ���Ϊ�������ȵ�Ӱ��
Fig. 8 Effect of emotional inhibition factor on action range
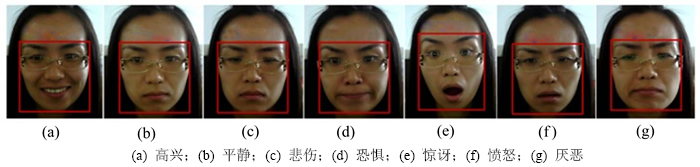
ͼ9 ʵʱ�����������
Fig. 9 Results of real-time emotion
ͼ10 ��֪����״̬�ĸ��ʷֲ�
Fig. 10 Probability distribution of cognitive emotional state
ͼ11 ��ͬ��֪�����»����˵����������ֲ�
Fig. 11 Mental energy distribution of robot with same cognitive emotion
4 ʵ�鼰�������
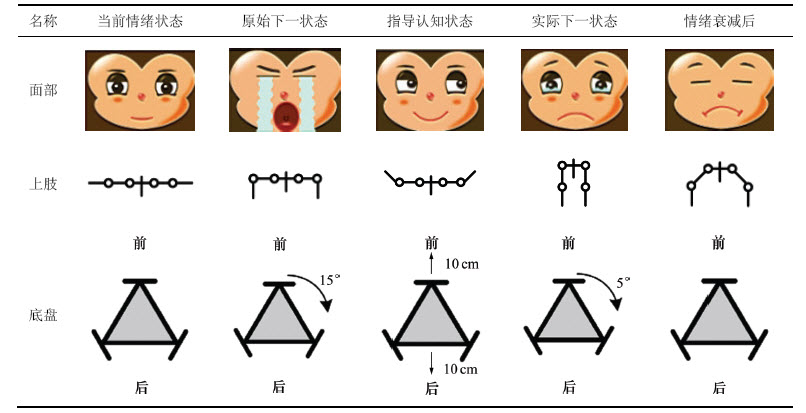
��2��ʾΪ�Ա���Ϊ���̼�������Ϊָ����֪����ʱ�������˵��������ڹ��̡������̼�����ǰ�������˴���ƽ��״̬�������˵����̼�����ʱ��������֪�������������ģ�ͣ������˵���������Ϊ���ȱ��˲���ޡ�Ȼ�����ڻ���������ָ����������ƵĹ�ͬ�����£������˵�ʵ�ʷ�Ӧ�������ң�ֻ�DZ��ֳ������ı��ˣ��⽫�ڽ������������ʵ��Ļ���������ָ�����ã�������ʹ���������Բ�����Ϊ������ƫ��ѭ���С�����ʱ���Ǩ�ƣ������˵�����״̬����ǿ��˥�������������ָ�ƽ����
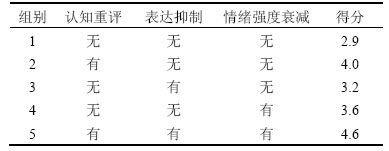
�ڽ��������У�����5�齻��ģʽ�Ա�ʵ�飬���3��ʾ���Էֱ�������֪���������������Լ�����˥��ǿ�ȶԽ���Ч����Ӱ�졣��10 min��������ʵ���30�������߷ֱ��ÿ�ֽ���ģʽ���д��(����Ϊ5��)������ȡ30�������ߵ�ƽ������Ϊ���յ÷֡������������֪�����κ�����ģ�͵���1�÷���ͣ����ۺ�������֪�������������ơ�����ǿ��˥������5�������û��������⣬�ӷ�������Կ�������֪�����Ը��Ʋ����ߵ�������Ϊ��Ч���������ƴ�֮������ǿ��˥��������С��
��2 �����˵��������ڹ���
Table 2 Emotion regulation process of robot
��3 �����ߵ��������
Table 3 Evaluation results of participants
5 ����
1) ��13���ɶȵĻ�����ʵ��ƽ̨Ϊ��������Gross��֪�����������뵽�����������Ʒ����������ģ���У������������ռ��еĻ�������������ģ�͡��ڴ�����״̬�ռ��У����ȣ�����ͨ��ָ��������ǿ�ȡ��Է����������ڻ����뵱ǰ�����˶���������Ŀ��Ŷȼ���õ���֪�����ĸ��ʷֲ�����Σ���������������������(������Ч��)����õ������˵�������ʱ���˥�����ɣ������ͨ���������Ļ��Ѷ�ϢϢ��صı��������������õ������������������ֵĶ������ȡ��Ӷ������������������Ļ����˵��������ڹ��̿���ͨ���ռ����ά����ֵ����������
2) ����֪����������ǿ��˥��������������HMM�IJ�ȷ������������ģ�����ϣ��õ������ռ��и��Ի��Ļ�������������ģ�ͣ��Դ�ģ������������������̡�ʵ��֤�����߱���֪���������������Ļ����˿����ڽ��������еõ������߸�����Ͽɡ�
�ο����ף�
[1] VINCIARELLI A, MOHAMMADI G. A survey of personality computing[J]. IEEE Transactions on Affective Computing, 2014, 5(3): 273-291.
[2] WHITEHILL J, SERPELL Z, LIN Y C, et al. the faces of engagement: automatic recognition of student engagement from facial expressions[J]. IEEE Transactions on Affective Computing, 2014, 5(1): 86-98.
[3] WEN Wanhui, LIU Guangyuan, CHENG Nanpu, et al. Emotion recognition based on multi-variant correlation of physiological signals[J]. IEEE Transactions on Affective Computing, 2014, 5(2): 126-140.
[4] MEULEMAN B, SCHERER K R. Nonlinear appraisal modeling: an application of machine learning to the study of emotion production[J]. IEEE Transactions on Affective Computing, 2013, 4(4): 398-411.
[5] BROEKENS J, BOSSE T, MARSELLA S C. Challenges in computational modeling of affective processes[J]. IEEE Transactions on Affective Computing, 2013, 4(3): 242-245.
[6] LAZARUS R S. Relational meaning and discrete emotions. Appraisal processes in emotion: theory, methods, research[M]. Oxford: Oxford University Press, 2001: 37-67.
[7] EKMAN P. Lie catching and microexpressions[M]. Oxford: Oxford University Press, 2009: 118-133.
[8] AMERO D. Modeling motivations and emotions as a basis for intelligent behavior[C]// 1st International Symposium Autonomous Agents, New York: ACM, 1997: 148-155.
[9] GADANHO S. Reinforcement learning in autonomous robots: an empirical investigation of the role of emotions[D]. Edinburgh: University of Edinburgh, 1999: 35-47.
[10] VELSQUEZ J. An emotion-based approach to robotics[C]// IEEE/RSJ International Conference on Intelligent Robots and Systems. NJ: IEEE, 1999: 235-240.
[11] MURPHY R, LISETTI C, TARDIF R, et al. Emotion based control of cooperating heterogeneous mobile robots[J]. IEEE Transactions on Robotics and Automation, 2002, 18(5): 744-757.
[12] MEHRABIAN A. Pleasure arousal dominance: a general framework for describing and measuring individual differences in temperament[J]. Current Psychology: Developmental, Learning, Personality, Social, 1996, 14(4): 2612-2621.
[13] WU Qi, SHEN Xunbing, FU Xiaolan. The machine knows what you are hiding: an automatic micro-expression recognition system[C]// Proceedings 4th International Conference on Affective Computing and Intelligent Interaction. Berlin: Springer-verlag, 2011: 152-162.
[14] LIU T, CHEN W, LIU C H, et al. Benefits and costs of uniqueness in multiple object tracking: the role of object complexity[J]. Vision Research, 2012, 66: 31-38.
[15] SCHERER K, EKAM P. Approaches to emotions[M]. Hillsdale: Lawrence Erlbaum Associates, 1984: 158-169.
[16] ORTONY A, CLORE G L, COLLINS A. The cognitive structure of emotions[M]. London: Cambridge University Press, 1988: 23-29.
[17] ZECCA M, ROCCELLA S, MIWA H. On the development of the emotion expression humanoid robot WE-4RII with RCH-1[C]// Proceedings of the 4th IEEE/RAS International Conference on Humanoid Robots. Tokyo, Japan, 2005: 235-252.
[18] BREAZEAL C. Function meets style: insights from emotion theory applied to HRI[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part C: Applications and Reviews, 2004, 34(2): 187-194.
[19] GROSS J J. Emotion regulation: affective, cognitive, and social consequences[J]. Psychophysiology, 2002, 39(3): 281-291.
[20] GROSS J J. Emotion regulation in adulthood: timing is everything[J]. Current Directions in Psychological Science, 2001, 10(6): 214-219.
[21] LIU Xin, XIE Lun, YANG Wenxiang, et al. Dynamic regulation process of facial expression robot[J]. Journal of Control Theory and Applications, 2011, 28(7): 936-946.
[22] GROSS J J. The emerging field of emotion regulation: an integrative review[J]. Review of General Psychology, 1998, 2(3): 271-299.
(�༭ �Կ�)
�ո����ڣ�2015-05-26�������ڣ�2015-09-24
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(61672093��61432004)�����ҿƼ�֧�żƻ���Ŀ(2014BAF08B04)����������Ȼ��ѧ����������Ŀ(4164091)���й���ʿ���ѧ����������Ŀ(2015M580048)�������У��������ҵ���ר���ʽ�������Ŀ(FRF-TP-15-034A1) (Projects(61672093, 61432004) supported by the National Natural Science Foundation of China; Project(2014BAF08B04) supported by the National Science and Technologies Pillar Program of China; Project(4164091) supported by Beijing Natural Science Foundation; Project(2015M580048) supported by National Science Foundation for Postdoctoral Scientists of China; Project(FRF-TP-15-034A1) supported by Fundamental Research Funds for the Central Universities)
ͨ�����ߣ����أ���ʿ�����ڣ���ʿ����ʦ�����»����ˡ��˹����ܡ���֪��м����о���E-mail: xielun@ustb.edu.cn
ժҪ�����ݽ��������еij������ۣ�����Դ������״̬�ռ��н������������˵������ɿص���е��ڹ��̡����ȣ��ڷ�ϣ��-Τ�����ɵĻ����ϣ���������Gross�������������Է�����֪������ָ������֪�������̣���Σ��������ǿ�ȵ����������һ��������Ч�������������ǿ��˥��ģ�ͣ��ٴΣ����ݶ�������ѧ���ۣ������������Դ�������������ռ䣬����ģ�����̼��������������������������ù��̣�������������������ѶȵĻ�������Ϊ��������ģ�͡��ڴ��о������ϣ��������HMM������״̬�̼�ת���㷨����������ģ���㷨����13���ɶȵķ��������ƽ̨�У�ʵ�ַǵ��ͱ��齻�������л����˲�ȷ�����������̵Ķ�̬���ɿص��ڡ�ͨ������������״̬�ռ��еIJ�ȷ���Լ��㽫��ɢ������״̬��չ�������ռ��У������������м�״̬�Լ����ӻ������������ڵ������������о����������������֪�����������������Ļ����˿����ڽ���������ʹ�����ߵ�����̶ȵõ�һ��������
