

DOI�� 10.11817/j.issn.1672-7207.2020.03.010
�������������֧��������ģ��PID���Ʋ���
�Ӷ���1, 2,������1,��ǫ1,κ����2,����1
��1. ���ϴ�ѧ ���繤��ѧԺ������ ��ɳ��410083��
2. ���Ϲ���ѧԺ ��е����ѧԺ������ ��̶��411104��
ժ Ҫ��
��������е��ȶ��ԺͿ��ƾ��ȣ���֧�������ع�Ԥ��(support vector regression,SVR)��ģ�����ơ�PID���Ƶ����ϣ����һ��֧��������ģ��PID���Ʋ���(SVR-fuzzy-PID)���ÿ��Ʋ������Ƚ���ģ������ͨ��ģ���������PID�������ı���ϵ��������ϵ������ϵ����Ȼ��ͨ��PID������������������ڷ�����������֧�������ع�Ԥ��ģ��Ԥ����ƶ�����һ��ʱ���ķ�����������Ԥ��ֵ���淴��ֵ���Ӷ�ʵ�֡���ǰ�����ƣ��Խ����ͳ����ϵͳ�Ŀ����ͺ����⡣�о�����������ÿ��Ʋ�����ƵĽ����������ϵͳ����ϵͳ�ȴ�ͳ�Ŀ���ϵͳ���и������������ܣ���ʵ�ֽ����������ϵͳ�Ŀ��ٺ��ȶ����ơ�
�ؼ���:֧����������ģ�����ƣ�PID���ƣ������������
��ͼ�����:TH6 ���ױ�־��:A ���ſ�ѧ(��Դ����)��ʶ��(OSID)
���±��:1672-7207��2020��03-0661-07
SVR-fuzzy-PID strategy of AC electrical dynamometer
ZHONG��Dingqing1, 2, WANG��Ailun1, HE��Qian1, WEI��Kexiang2, TANG��Yong1
(1. School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China��
2. School of Mechanical Engineering, Hunan Institute of Engineering, Xiangtan 411104, China)
Abstract: In order to improve the stability and control accuracy of alternating current��AC�� electrical dynamometer, a SVR-fuzzy-PID based control strategy was proposed through combing the theories of SVR(support vector regression) prediction, fuzzy control and PID control. In this control strategy, fuzzy rule was firstly established, which was used to adjust scale, integral and differential coefficients to control the output of PID controller. The SVM(support vector machine) prediction model was applied to predict the feedback of controlled objects to realize the advanced control and solve the problem of control delay. The results show the proposed control strategy presents a better control performance for alternating current electrical dynamometer compared to traditional control strategy, which can realize the fast and stable control of alternating current electrical dynamometer.
Key words: support vector machine; fuzzy control; PID control; alternating current electrical dynamometer
�����Ҫ����ˮ������������������������������ڲ��Զ�������ϵͳ�Ĵ��ݹ���[1-2]��ˮ������Ľṹ�����豸�Ӵ���Ч�ʵͣ�����������Ľṹ���ӣ������Ѷȴ��ҿ��ƾ��ȵ͡��봫ͳ�����ȣ���������������нṹ�����Է�Χ�㡢��ʵ�ֶ�������ϵͳ���Ե�ͬʱ������ʵ���������յ��ŵ㣬��ˣ�������������õ��ձ�Ӧ��[3-5]������Ŀ�������ֱ��Ӱ���Ŷ�������ϵͳ���Լ����ķ�չ���������������Ҫȡ���ڿ��ƾ��ȡ�������Ӧ�ٶȡ����ƿɿ��Ե�ָ�ꡣ������Բ�����о�������ֱ��20����60��������ڸ������Ժ����ʼ������о�������Ҫ�����ڲ��Բ���������ϡ�������Բ�����о����磬��Ҫ�����ڲ���Ŀ��������ϡ�Ŀǰ�����ż�����������������ۡ����Ӽ������о����ϳ��죬�����������ϵͳ���ڳ��ż��ɻ������ܻ������绯����չ[6]��CHAVHAN��[7]����LabView���������һ�ֲ������̨�ܵ��˼ʽ������ϵͳ����ϵͳ����ɲ������̨�ܵ�ϵͳ�����Լ����ݲɼ���ͬʱ���о���Ա��һЩ�Ƚ��Ŀ��Ʋ�����Ӧ���ڵ�������ϣ���������Ӧ����[8]��ģ������[9]�����������[10]��PID����[11]�ȡ�ͬʱ��һЩ�µĿ��Ʋ�������ѹ��Ƶ����[12]��ʸ������[13]��ֱ��ת�ؿ���[14]�ȱ���������ڽ����������ϵͳ���б为�صķ�����ʱ�����ԣ��Ҵ�ͳ���Ʋ�������Ӧ����ʵʱ�Խϲ���ԣ���ͳ���Ʋ��Զ��ڽ����������ϵͳ����ȡ�ýϺõĿ���Ч����Ϊ����߽�������������е��ȶ��ԺͿ��ƾ��ȣ��������߽��֧�������ع�Ԥ�⡢ģ�����ơ�PID������3�����ۣ����һ��֧��������ģ��PID���Ʋ��ԡ�
1 SVR-Fuzzy-PID����ģ��
1.1��PID����
PID������ṹ���ȶ��Ըߡ�����������ŵ��Ѿ���ΪĿǰӦ�ýϹ㷺�Ŀ��Ʒ���[15-16]��PID�����ɱ���(P)����(I)�Լ�����(D)��Ԫ���ɣ���������������ϵΪ

ʽ�У�e(t)Ϊ�����Ʋ�����ʵ��ֵ���趨ֵ��ƫ���PID����������������uΪ�����źţ���PID���������������TiΪ����ʱ�䳣����TdΪ��ʱ�䳣����KpΪ�������档
��ʽ(1)������ɢ������

ʽ�У�u(k)Ϊϵͳ��kʱ�̵Ŀ�������e(k)Ϊ����e(k)Ϊ���仯�ʣ�KpΪ����ϵ����KiΪ����ʱ�䳣����KdΪ��ʱ�䳣����
�����й����У���ƫ���������PID�������Ĺ��ܣ�ƫ��e(t)��ӳʵ�����ֵy(t)ƫ��ο�ֵr(t)�ij̶ȡ�ƫ��e(t)����PID���Ƶı������������ִ������ִ���֮�����ü�Ȩ֮��Ľ����Ϊ���ض�������룬���Դﵽ����ϵͳ����Ӧ������ϵͳƫ���Ŀ�ġ�PID������ԭ����ͼ1��ʾ��
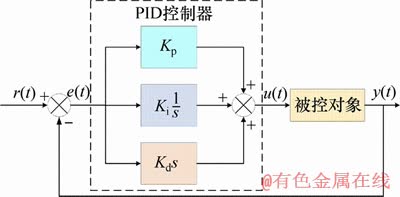
ͼ1��PID������ԭ��ͼ
Fig. 1��Schematic diagram of PID controller
����PID����������̬���������Ӧ�ٶȵķ���֮һ�ǵ���Kp��Ki��Kd��3����������������ģ���㷨����3�����������Ż���
1.2��Fuzzy-PID����
ģ��(Fuzzy)������ͨ������ģ�������Լ�����ϵ����ģ���������Ӷ����ѶԾ�ȷ��ѧģ�͵������������Ĺ���������ͼ2��ʾ����ͼ2�ɿ���ģ����������Ҫ��ģ������⡢ģ������ģ���������Լ���ģ�������[17-18]��

ͼ2��ģ����������
Fig. 2��Schematic diagram of fuzzy controller
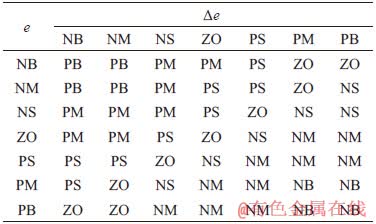
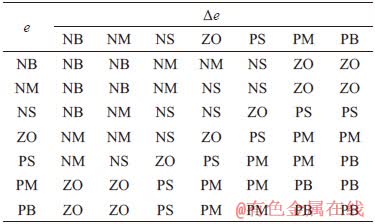
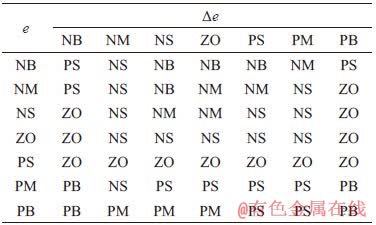
Kp��Ki��Kd��ģ������ֱ����1��3��ʾ�����У�NB��NM��NS��ZO��PS��PM��PBΪe(k)�ͦ�e(k)��ģ���Ӽ����ֱ��ʾ�����С���С���㡢��С�����С�����ͳ��PID��������Kp��Ki��Kd��3�����������ǹ̶�����ģ���ʵ�ʹ�����������ʵʱ���е�����ģ��PID����������e(k)�ͦ�e(k)Ϊ����������Kp��Ki��KdΪ�������ͨ����1��3�е�ģ�������Kp��Ki��Kd����������������Ҫ����ԭ����ͼ3��ʾ��
��1��Kp��ģ�������
Table 1��Fuzzy rule for Kp
��2��Ki��ģ�������
Table 2��Fuzzy rule for Ki
��3��Kd��ģ�������
Table 3��Fuzzy rule for Kd
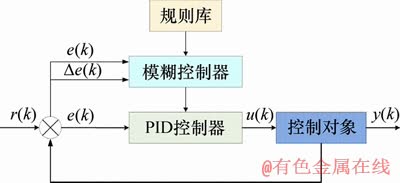
ͼ3��Fuzzy-PID������ԭ��ͼ
Fig. 3��Schematic diagram of Fuzzy-PID controller
����e(k)����e(k)��Kp��Ki��Kd��������̬�ֲ������Եõ���Ӧ�������Ⱥ���������ģ�����ɵ���PID��Kp��Ki��Kd��
PID���������¿��Ʋ���ΪKp��Ki��Kd�������������£���ģ��������������ģ��������e(k)�ͦ�e(k)Ϊ���������õ�Kp��Ki��Kd����Ӧ������{e, ��e}p��{e, ��e}i��{e, ��e}d��֮����õ��ĵ��������ʼֵKp0��Ki0��Kd0���Ӽ��ɵõ��¿��Ʋ�����
1.3��SVR-Fuzzy-PID����
��֧��������(support vector machine��SVM)�ɷ��������ƹ����ع���������Եõ�֧�������ع鷽��(support vector regression��SVR)����ʱ��֧���������ı��㷨Ҳ����Ϊ֧����������(support vector classification��SVC) [19-20]��SVC�еij�ƽ����߽߱���SVR�Ļع�ģ�ͣ�

ʽ�У�f(x)Ϊ�۲�ֵ��XΪ����������wΪ�ع�ϵ��������bΪ������
SVR����ϡ���ԣ����������㹻�ӽ��ع�ģ�͵Ļع�ֵ��������ع�ģ�͵ļ���߽��ڣ����������������ʧ����Ӧ����ʧ��������Ϊ��-��������ʧ����(��-insensitive loss)��

ʽ�У���Ϊ��������߽���ȵij���������ʽ(5)��֪��������ʧ������SVCʹ�õĽ�����ʧ�������ƣ���ԭ�㸽���IJ���ȡֵ���̶�Ϊ0����������SVM��SVR�ɱ���Ϊ���¶����Ż����⣺
ʹ���ɳڱ����κͦ�*��ʾ����ƫ���-��������ʧ�����̶Ⱥ�ɵã�

���У�CΪ�ͷ����ӡ�ͨ�������������ճ��Ӧ�����*���̺ͦ�*���ɵõ����������պ����Ͷ�ż���⣺
���У���ż����������KKT������
�Ըö�ż���������⣬���Եõ�SVR����ʽ��

SVR-Fuzzy-PID�Ŀ���ԭ����ͼ4��ʾ��SVR-Fuzzy-PID����������Fuzzy-PID�������ķ�����·������1��SVRԤ��������Ԥ��������Ҫ�����Dzɼ����y��ʱ��k֮ǰ��n+�Ӹ���������������ΪԤ�������룬������Ǹ�Ԥ����Ԥ��PID��������k+mʱ�̵����y(k+m)��������k+mʱ��Ԥ������y(k+m)�滻PID��������kʱ�̵����y(k)��ͬ���أ��ڼ���SVRԤ������ԭ����Fuzzy-PID����������ƫ��e(k)=r(k)-y(k)�е�y(k)Ҳ��SVRԤ����Ԥ���y(k+m)�����棬�µļ���Ԥ�����e(k)=r(k)-y(k+m)��
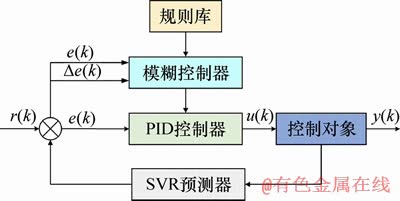
ͼ4��SVR-Fuzzy-PID������ԭ��ͼ
Fig. 4��Schematic diagram of SVR-Fuzzy-PID controller
2 ������������
Ϊ����֤�����������SVR-Fuzzy-PID��������Ч����ѡ�������ϵͳ��SVR-Fuzzy-PID������Ӧ�����ȶ������У�������ͼ5��ʾģ�ͣ��Դ�Ϊ�������з��档�ٶ�������ϵͳģ�͵Ĵ��ݺ���Ϊ
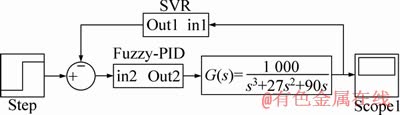
ͼ5��3����ģ��
Fig. 5��Third-order control model
Ϊ���о������Ը���Ӱ���µ�ϵͳ��Ӧ����t=1 sʱ����ϵͳ�м���ǿ��Ϊ1�ij����Ը��ţ�ϵͳ����Ӧ������ͼ6��ʾ��Ϊ���о���ʱ�Ը���Ӱ���µ�ϵͳ��Ӧ����t=1 sʱ����ϵͳ�м���ǿ��Ϊ1�ĸ��ţ�����t=1.2 sʱ���Ŷ���ȥ��ϵͳ����Ӧ������ͼ7��ʾ��
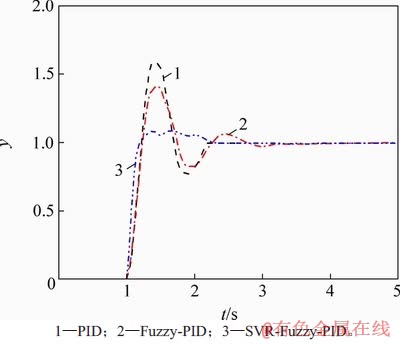
ͼ6��ϵͳ�ڳ������Ŷ��µ���Ӧ����
Fig. 6��System response under continuous disturbance
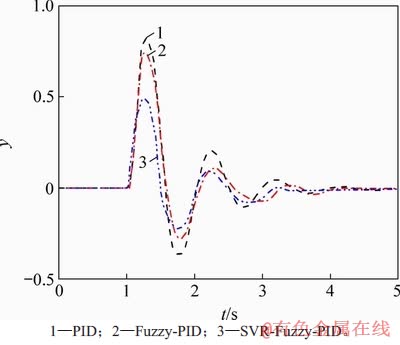
ͼ7��ϵͳ����ʱ���Ŷ��µ���Ӧ����
Fig. 7��System response under temporal disturbance
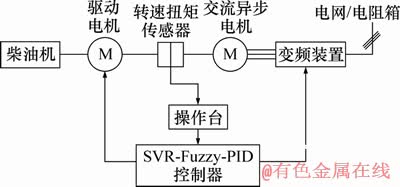
ͼ8��ʵ��ԭ��ͼ
Fig. 8��Schematic diagram of experiment
��ͼ6��ͼ7���Կ�����SVR-Fuzzy-PID�������Ŀ������ܱ�Fuzzy-PID��������PID�������Ŀ������ܺã���Ҫ������ϵͳ�����Ŷ�ʱ��SVR-Fuzzy-PID����������Ӧ����Ѹ�٣���Ϊ�������м�����SVRԤ������ͬʱ�ܹ����Խ��ͳ������Լ����̵���ʱ�䡣�ڳ������Ŷ��£���������ͣ�ϵͳû�в�������Ѹ�ٻָ���ƽ��״̬������ʱ���Ŷ��£�������SVRԤ������Fuzzy-PID����������Ӧ�ٶ���ߣ�ͬʱ���ܹ����Ŷ���ʧʱѸ���ȶ�ϵͳ��
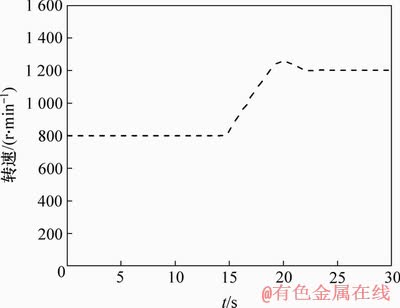
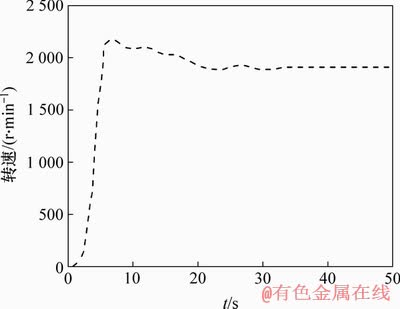
ͼ9��ϵͳ��ʼ����ת�ٶ�̬��Ӧ
Fig. 9��Systm response of initial running speed
��ͼ6��ͼ7���Կ�����PID��������Fuzzy-PID��������SVR-Fuzzy-PID�������Ŀ�����������ߡ�����Ҫ����ΪPID�������м�����Fuzzy��������ʹ��PID�������е�Kp��Ki��Kd��3���������Ը���ϵͳ��ʵ������״�����ϵصõ���������������SVR��������Fuzzy-PID����������ǰհ�ԣ�ʹ����Ч���õ��Ż���
3 ʵ���������
Ϊ����֤�����������Ľ������������SVR-Fuzzy-PID�������Ŀ������ܣ���ʵ��ϵͳ�ĵ��Թ����н��о��д����Ե�ת�ٶ�̬��Ӧ�����Լ��ȶ������顣���ͻ��ͺ�ΪAVL 5402��ת�ٷ�ΧΪ800��2 000 r/min������ͺ�ΪFC 2012���ת��Ϊ3 000 r/min����ѹ��ΧΪ0��500 V��������ΧΪ0��40 A��ת�ӵ���Ϊ0.9 �������ӵ���Ϊ0.4 ����ͼ8��ʾΪʵ��ԭ��ͼ��
ת�ٶ�̬��Ӧ�������Ҫʵ����2������ɣ�1) ��ʼ״̬���ٶ���Ӧ����ʵ�飻2) �����й����У������ٶȸı�ʱϵͳ�Ķ�̬��Ӧ�������顣��ʵ������У����ν����ⷢ���������ŵ�������Ҫ�����λ�ã�ע���ʱ���ⷢ����Ҫ���ڵ���״̬��Ȼ���ϵͳ�ĸ�������������Ӧֵ�����ⷢ������ʱ��ת��nΪ1 200 r/min������ʼ���Ե��ת������Ϊ800 r/min������������ú���������ϵͳ����ʱ��ת�ٵĶ�̬��Ӧ��ͼ9��ʾ��Ϊ��һ��̽�ֹ��ɹ�����ϵͳ�Ķ�̬����Ʒ�ʣ����ٶ�ͻ�������½���ϵͳ�Ķ�̬��Ӧ�������飬���ֵ�ת��n=1 200 r/min ʱ�����ⷢ���������ſ���ά�ֲ��䡣��ת��n=1 500 r/min��Ϊ�趨ֵ��ת��ͻ��ʱת�ٶ�̬��Ӧ��ͼ10��ʾ��
���ĵ��ȶ������黹�������˳������飬ת�������趨Ϊ1 900 r/min����������Ľ��У����ⷢ������ת�ٴ�1 800 r/min����ת�ٽӽ�������ֵ1 900 r/minʱ��SVR-Fuzzy-PID��������ʼ����(��ʱ�����ſ���ά�ֺ㶨)������������ת�ٲ�ʹ֮����1 900 r/min����ʱ�����ſ���ά�ֺ㶨����ת��������2 100 r/minʱ�����ⷢ�����ϵͳ�ĸ��ػ��������ӣ�����ʹ�ñ��ⷢ�����ص�ת��1 900 r/min����״̬���У�ϵͳ�����ȶ�����ͼ11��ʾ��
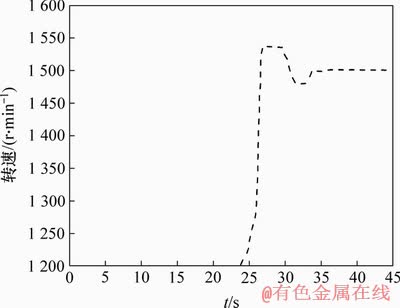
ͼ10��ת��ͻ��ʱת�ٶ�̬��Ӧ
Fig. 10��Speed response under speed mutation
ͼ11���ȶ���������
Fig. 11��Results of stability test
�����������Կ�����SVR-Fuzzy-PID�������Ķ�̬��Ӧ���٣���������С����̬�����ƾ��ȸߣ�����������ǿ���ܵ���˵��������Ƶ�SVR-Fuzzy-PID���������ԽϺõ����㽻�������ϵͳ�Ŀ�������
4 ����
1) ͨ�����SVRԤ�⡢Fuzzy���ơ�PID���������һ����Խ������������SVR-Fuzzy-PID��������
2) ��SVR-Fuzzy-PID�������У�ģ������ɳ�������PID�IJ���Kp��Ki��Kd����SVR���ڷ������ڿ�ʵ�֡���ǰ�����ƣ��Խ����ͳ����ϵͳ�Ŀ����ͺ����⡣
3) �봫ͳ PID �������ȣ���������Ƶ�SVR-Fuzzy-PID����������ʹ���������������Ӧ�ٶ���ߣ�ͬʱ������ϵͳ���ȶ���Ҳ�õ�һ��������
�ο����ף�
[1] ��־��, �Ź���, ����, ��. �������ת��Ӱ������ģ����ɫ��������[J]. ���Ӳ���������ѧ��, 2012, 26(8): 693-698.
ZHANG Zhigang, ZHANG Guixiang, LIU Teng, et al. Fuzzy grey relation analysis on torque influence factors of alternating current electrodynamometer[J]. Journal of Electronic Measurement and Instrument, 2012, 26(8): 693-698.
[2] �Ӷ���, ������, ��ǫ, ��. ���������������״̬�Ļ���Ԥ�����쳣���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2019, 50(2): 295-303.
ZHONG Dingqing, WANG Ailun, HE Qian, et al. Chaos prediction and abnormality diagnosis of running state of AC electrical dynamometer[J]. Journal of Central South University (Science and Technology), 2019, 50(2): 295-303.
[3] �����. ��������������Բ������봦������ת���������о�[D]. ��ɳ: ���ϴ�ѧ��е�����ع���ѧԺ, 2015: 8-17.
ZUO Guanglei. Denoising for parametric signals of AC dynamometer and soft measurement of its torque[D]. Changsha: Hunan University. College of Mechanical and Vehicle Engineering, 2015: 8-17.
[4] ZHANG Zhigang. Estimating model on torque for alternating current electric dynamometer based on the support vector machine combined with the fuzzy system[J]. Journal of Information and Computational Science, 2013, 10(4): 1047-1054.
[5] �⺣��. 30 kW���������������ϵͳ�������ʵ��[D]. �人: �人������ѧ�Զ���ѧԺ, 2017: 3-6.
WU Hailong. Design and implementation of 30 kW AC power dynamometer control system[D]. Wuhan: Wuhan University of Technology. School of Automation, 2017: 3-6.
[6] �����. ����ϵͳ����[D]. ����: ���ִ�ѧ����ѧԺ, 2016: 1-3.
WANG Yancao. Development of motor dynamometer system[D]. Changchun: Jilin University. College of Physics, 2016: 1-3.
[7] CHAVHAN K B, UGALE R T. Automated test bench for an induction motor using LabVIEW[C]// 2016 IEEE 1st International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES). Delhi, India: IEEE, 2016: 1-35.
[8] LASCU C, BOLDEA I, BLAABJERG F. A modified direct torque control for induction motor sensorless drive[J]. IEEE Transactions on Industry Applications, 2000, 36(1): 122-130.
[9] VAS P, NEUROTH M, STRONACH A F. Full fuzzy control of a DSP-based high performance induction motor drive[J]. IEE Proceedings-Control Theory and Applications, 1997, 144(5): 361-368.
[10] VASIC V, VUKOSAVIC S N, LEVI E. A stator resistance estimation scheme for speed sensorless rotor flux oriented induction motor drives[J]. IEEE Transactions on Energy Conversion, 2003, 18(4): 476-483.
[11] NAHARI T, JOELIANTO E, SUYATMAN. An eddy brakes dynamometer control system design using state space based PID controller[C]// 2012 IEEE Conference on Control, Systems & Industrial Informatics. Bandung, Indonesia: IEEE, 2012: 163-168.
[12] SAARAKKALA S, ALAHAIVALA A, HINKKANEN M, et al. Dynamic emulation of multi-mass mechanical loads in electric drives[C]// Proceedings of the 2011 14th European Conference on Power Electronics and Applications. Birmingham, UK: IEEE, 2011: 1-10.
[13] LIU Shuxi, WANG Mingyu, LI Taifu. Research on direct torque control based asynchronous dynamometer for dynamic emulation of mechanical loads[J]. Kybernetes, 2010, 39(6): 1018-1028.
[14] AKIYAMA T, KOBAYASHI M, SAWADA Y, et al. Control of standard engine test bench system for dynamic road load tests[C]// 2006 SICE-ICASE International Joint Conference. Busan Exhibition & Convention Center-BEXCO. Busan, South Korea: IEEE, 2006: 1566-1569.
[15] ANG K H, CHONG G, LI Y. PID control system analysis, design, and technology[J]. IEEE Transactions on Control Systems Technology, 2005,13(4): 559-576.
[16] CIVELEK Z, LUY M, CAM E, et al. Control of pitch angle of wind turbine by fuzzy pid controller[J]. Intelligent Automation & Soft Computing, 2016, 22(3): 463-471.
[17] LI Yongming, SUI Shuai, TONG Shaocheng. Adaptive fuzzy control design for stochastic nonlinear switched systems with arbitrary switchings and unmodeled dynamics[J]. IEEE Transactions on Cybernetics, 2016, 47(2): 403-414.
[18] YIN Shen, SHI Peng, YANG Hongyan. Adaptive fuzzy control of strict-feedback nonlinear time-delay systems with unmodeled dynamics[J]. IEEE Transactions on Cybernetics, 2016, 46(8): 1926-1938.
[19] CHEN Rong, LIANG Changyong, HONG W C, et al. Forecasting holiday daily tourist flow based on seasonal support vector regression with adaptive genetic algorithm[J].Applied Soft Computing, 2015, 26: 435-443.
[20] YANG Zhen, GU Xiaosheng, LIANG Xinying, et al. Genetic algorithm-least squares support vector regression based predicting and optimizing model on carbon fiber composite integrated conductivity[J]. Materials & Design, 2010, 31: 1042-1049.
���༭ �²ӻ���
�ո����ڣ� 2019 -08 -12; �����ڣ� 2019 -10 -22
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(11772126)����̶�д�����ʡ�н���ר��(CG-YB20191011) (Project(11772126) supported by the National Natural Science Foundation of China; Project(CG-YB20191011) supported by Innovative Province-City Special Construction Program of Xiangtan City)
ͨ�����ߣ��Ӷ��壬��ʿ�о�������ʦ�����¸��ӻ���װ����������������о���E-mail: zhdiqi@126.com
ժҪ:Ϊ����߽�������������е��ȶ��ԺͿ��ƾ��ȣ���֧�������ع�Ԥ��(support vector regression,SVR)��ģ�����ơ�PID���Ƶ����ϣ����һ��֧��������ģ��PID���Ʋ���(SVR-fuzzy-PID)���ÿ��Ʋ������Ƚ���ģ������ͨ��ģ���������PID�������ı���ϵ��������ϵ������ϵ����Ȼ��ͨ��PID������������������ڷ�����������֧�������ع�Ԥ��ģ��Ԥ����ƶ�����һ��ʱ���ķ�����������Ԥ��ֵ���淴��ֵ���Ӷ�ʵ�֡���ǰ�����ƣ��Խ����ͳ����ϵͳ�Ŀ����ͺ����⡣�о�����������ÿ��Ʋ�����ƵĽ����������ϵͳ����ϵͳ�ȴ�ͳ�Ŀ���ϵͳ���и������������ܣ���ʵ�ֽ����������ϵͳ�Ŀ��ٺ��ȶ����ơ�
